FreeRTOS
化学信息学
libbinder
turtle
ras
模板
AI二次开发
光流
游戏策划
远程工作
知识产权
Cadence Allegro
android版本
FCN
Conditional注解
秒定时器
allergo
VR直播
jmeter压测
循环平稳检测
自动驾驶
2024/4/11 15:43:43
Ros机器人/物联网操作系统
综合技术栈
计算机 (微控制器)(OpenCR)网络 (实时数据处理)视觉嵌入式传感器驱动器 (舵机控制)固件开发 (FPGA)自动驾驶SLAM 即时定位与地图构建 应用
嵌入…
![打开gazebo报[Err] [REST.cc:205] Error in REST request问题解决](/images/no-images.jpg)
打开gazebo报[Err] [REST.cc:205] Error in REST request问题解决
打开gazebo报[Err] [REST.cc:205] Error in REST request问题解决
问题
在终端运行
gazebo或者
roslaunch gazebo_ros empty_world.launch打开 gazebogazebogazebo 时,终端报 [Err] [REST.cc:205] Error in REST request
解决方法
sudo gedit ~/.ignition/fue…
(四) carla中创建小车、采集数据
(四) Carla中创建小车、连接相机、采集图像
carla中放置小车、控制过程
参考安装包里面的 PythonAPI/examples/PythonAPI/examples/PythonAPI/examples/ 中给出的一些学习程序,总结在 carlacarlacarla 中放置小车、控制小车步骤。 1.首先,添加 carlaca…

GPS从入门到放弃(七)、GPS卫星位置解算
A A_sqrt**2 # 卫星轨道半长轴
print("A{}".format(A))上一篇讲了开普勒轨道参数,根据这些参数就可以确定卫星的位置,这一篇我们来实际计算一下。
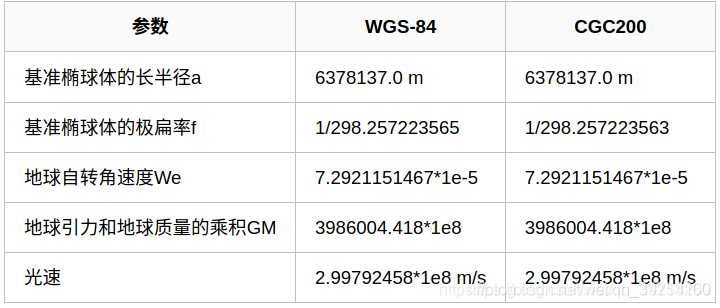
WGS-84基本参数
首先给出几个WGS-84坐标系中的基本参数: Python代码如下&#x…

VINS 细节系列 - readIntrinsicParameter()
一、 相机标定参数读取
trackerData[0].readIntrinsicParameter(sConfig_file)1、 readIntrinsicParameter()函数 void FeatureTracker::readIntrinsicParameter(const string &calib_file)
{m_camera CameraFactory::instance()->generateCame…
ROS进阶功能—ROS - MATLAB
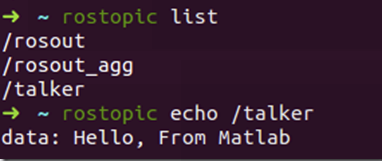
ROS进阶功能—ROS - MATLAB 目录一、 ROS - MATLAB是什么二、ROS - MATLAB可以做什么三、连接Matlab和ROS1、确定IP地址2、在Matlab中设置IP3、ROS->Matlab4、Matlab->ROS众所周知Matlab是一款强大的数据处理工具,在科研、教学、商业领域广泛应用,…
如何入门Apollo自动驾驶框架?分享一点经验
作为程序员,写一天代码胜过看十天代码,做以下几件事可以快速度过刚开始最痛苦的一个月。
1、接收一个图像topic,在图像上画一个框,再发布一个新的topic,在cyber_visualizer里面显示出来。这个过程可以学到知识点包括&…
C++ 修改YAML文件的一个node节点
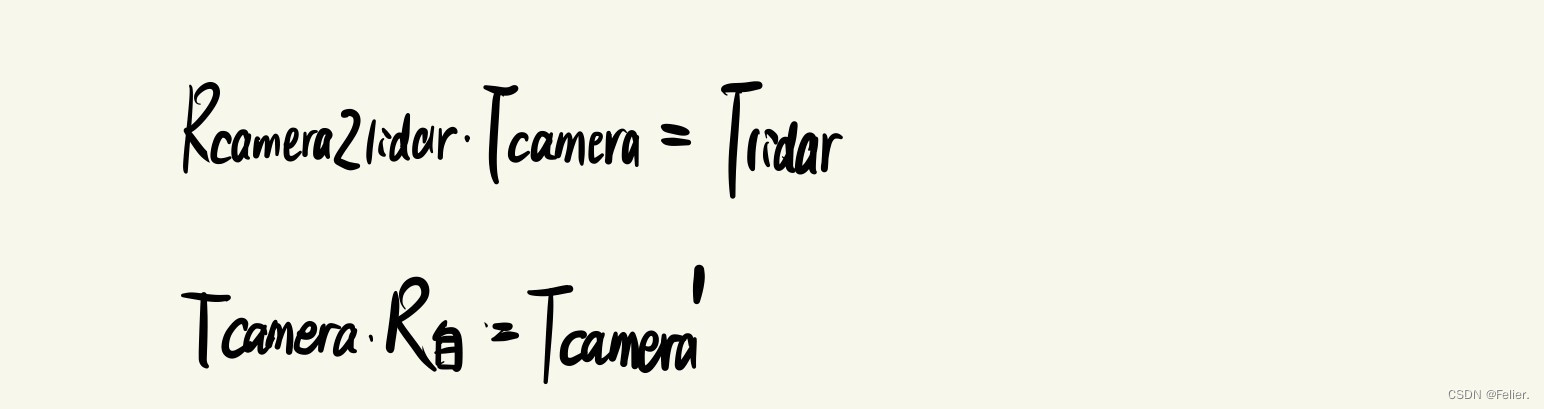
这是相机到激光的外参文件,我需要更改rotation的w,x,y,z,但是不改其他的node
header:seq: 0stamp:secs: 0nsecs: 0frame_id: velodyne128
child_frame_id: right_front
transform:translation:x: 0.51y: 0.31z: -0.10rotation:w: 0.20917936691977584x:…
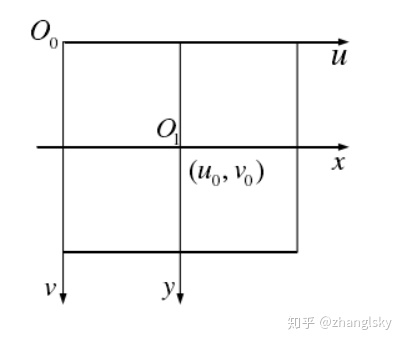
Apollo中的世界坐标系、相机坐标系、图像坐标系、像素坐标系
Apollo点云感知中的世界坐标系是velodyne128激光的位置(蓝色坐标系,X轴表示障碍物水平距离);
相机坐标系是相机的位置(红色坐标系,Z轴表示水平距离); 此处有一个坑:
mo…
摄像头感知的结果不能在cyber_visualizer里面显示(记录一次用VS code debug的过程)
问题是:
cyber_monitor里面可以显示我自己写的通道信息,我自己的通道名称是"/apollo/perception/front_6mm/box ",这个通道里面的信息格式和"/apollo/sensor/camera/front_6mm/image"是一样的,但是cyber_vis…
Apollo v5.5视觉感知流程
以下文件都在/modules/perception/目录下。
mainboard加载/perception/production/dag/dag_streaming_perception_camera.dag ,fusion_camera_detection_component.pb.txt为配置文件,进入/onboard/component/找类名为FusionCameraDetectionComponent的源…
Apollo视觉感知跑起来
首先,修改/home/yinshaohui/apollo5.5/modules/perception/camera/tools/offline/visualizer.cc文件的大概1454行
if (all_camera_recieved_ 0x1) { //0x3
这里把all_camera_recieved_ 改成做视觉感知的摄像头数量,我只用了1个front_6mm。
参考&…

参考系列2:优化库——ceres(三)实战案例
实战案例一 1.1 CmakeLists.txt配置
cmake_minimum_required(VERSION 2.8)
project(ceres)find_package(Ceres REQUIRED)
include_directories(${CERES_INCLUDE_DIRS})add_executable(test test.cpp)
target_link_libraries(test ${CERES_LIBRARIES})1.2 示例:cere…
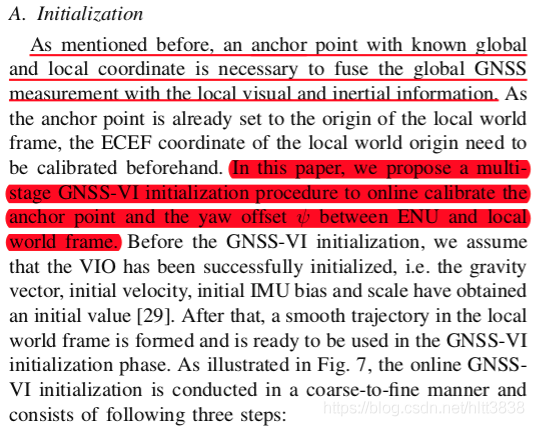
GVINS 程序解读三、 GNSS-VIO联合初始化 (1)
一、理论部分 In the following we first introduce the proposed coarse-to-fine GNSS initialization approach. 图1 An illustration of the proposed coarse-to-fine initialization process. 理解: GNSS-VIO初始化前,视觉和惯性已经完成了初始化(…
GVINS:运行测试 ——简单、详细、正确、参考轨迹(RTK)和RINEX文件生成 + 城市环境数据+采集数据的设备搭建(运行不成功的解决方法) +时间同步讨论+ 微信群
相关资料 GVINS源码:https://github.com/HKUST-Aerial-Robotics/GVINS数据集连接:https://github.com/HKUST-Aerial-Robotics/GVINS-Dataset文章链接:GVINS: Tightly Coupled GNSS-Visual-Inertial Fusion for Smooth and Consistent State Estimation.论文粗糙的翻译:GVIN…
Kalibr 安装+制作采集的图片和IMU数据生成 .bag 文件 (坑最全,解决方法最简单,最详细哈哈)
测试的数据集、标定板下载页面: https://github.com/ethz-asl/kalibr/wiki/downloads 官方下载和安装教程: https://github.com/ethz-asl/kalibr/wiki/installation Downloads ethz-asl/kalibr Wiki GitHub 方法一、Kalibr标定工具实现 (推荐)
1.0 安装依赖环境
sudo …
【4】使用 imu_utils 对 IMU 进行标定
程序的主页:
GitHub - gaowenliang/imu_utils: A ROS package tool to analyze the IMU performance. 1、首先安装ceres依赖项,然后下载编译安装ceres git clone https://github.com/ceres-solver/ceres-solver cd ceres mkdir build cd build cmake .. make sudo make inst…

八、IMU器件温度漂移补偿
感谢大神分享:多传感器融合定位理论基础(九):凸优化基础 - 知乎 1. 概述
温补的本质是系统辨识。之前我们在介绍标定的时候,也说过一句类似的话“标定的本质是参数辨识”。这两者之间相似又不同。参数辨识是指已知误差…

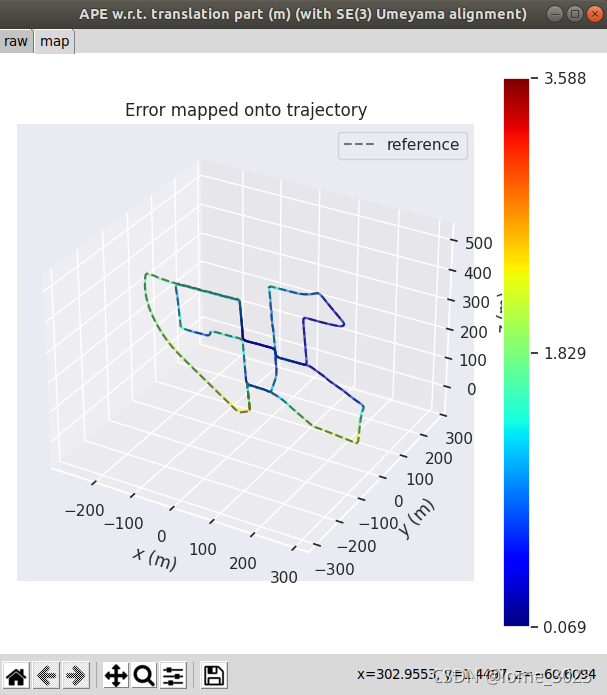
Vins-fusion GPS融合部分测试(自己的数据ZED+RTK)
经过前一段时间的积累,目前暂时成功实现了用自己的数据测试实现Vins-fusionGPS融合,其实放在数据采集处理上的时间比较多,踩了很多坑,效果在一些部分还不是很好,后期持续优化吧
其中黑色轨迹为VIO的输出轨迹ÿ…
ROS消息回调处理函数:ros::spin()和ros::spinOnce()
简介
它俩通常会出现在ROS的主循环中,程序需要不断调用ros::spin() 或 ros::spinOnce(),两者区别在于前者调用后不会再返回,也就是你的主程序到这儿就不往下执行了,而后者在调用后还可以继续执行之后的程序。
其实消息回调处理函…

Ceres Solver介绍
一、Ceres解决了什么问题
ceres是一款非线性优化问题的数值求解器。 Ceres解决的是非线性优化问题,给定初值,得出最优解。
具体求解就是构建一个误差函数,认为误差函数最小的时候解是最优的,即求解:
二、如何使用…

Vins-fusion gps融合 KITTY数据集测试
下载kitti数据集
下载kitti数据集和真值poses的00.txt以及sequences文件00序列的times.txt,(全网找了好久,最后不得已翻墙从官网down下来的)
代码修改,保存输出数据
先指定输出路径:打开vins-fusion/config/kitti_r…

VINS Fusion GPS融合部分
概述
VINS Fusion在VINS Mono的基础上,添加了GPS等可以获取全局观测信息的传感器,使得VINS可以利用全局信息消除累计误差,进而减小闭环依赖。
局部传感器(如相机,IMU,激光雷达等)被广泛应用于建图和定位算法。尽管这…

VINS-Mono 代码解析六、边缘化(3)
“ 在优化完成后,滑动窗口前,必须进行边缘化项的操作” 一、理论部分
VINS 细节系列 - 窗口优化_努力努力努力-CSDN博客 一个边缘化的例子
下面我们用一个具体例子来形象说明边缘化过程及其导致的矩阵稠密现象(fill-in)。设有 四个相机位姿 xpi ,
以及…

导航系统中坐标系介绍
日常开发中常用到八大坐标系:
1. 惯性坐标系 圆心是地球的原点,Z轴沿地轴方向朝向北极, X轴和Y轴位于赤道平面内,与Z轴满足右手法则,并且X轴和Y轴分别指向两个恒星。也就是说不随着地球的自转而发生变化。它是一个非常…

VINS 细节系列 - 窗口优化
DSO中除了完善直接法估计位姿的误差模型外(加入了仿射亮度变换,光度标定,depth优化),另一个核心就是像okvis一样使用sliding window来优化位姿,Engel也专门用了一节来介绍它。sliding window 就像c中的队列,队首进来一…

VINS 细节系列 - Pnp (3D-2D)
一、理论部分 1. DLT,直接线性变换 注意:原版的DLT中无须已知摄像机内参(请参考MVG)鉴于在大部分情况下,我们是已知摄像机内参的,因此这里的推导考虑了摄像机内参数。1.1 理论推导
3D参考点在世界坐标系下…

ZED2双目相机运行VINS-FUSION初试
基于ZED2运行VINS-MONO的经验,在运行VINS-FUSION前有几点tips想跟大家分享,应该能在运行的过程中避免一些踩坑吧。
TIPs
1)关于zed2标定 开始使用Kalibr进行相机单目/双目及联合标定,虽然重投影误差最高也就5个像素,…

紧耦合的激光视觉惯导SLAM系统:论文笔记_S2D.66_ICRA_2021_LVI-SAM
目录 基本情况 摘要 介绍 完整的激光视觉惯导SLAM系统 A. 系统概述 B. 视觉惯导系统 C.雷达惯导系统 实验 基本情况 题目: LVI-SAM: Tightly-coupled Lidar-Visual-Inertial Odometry via Smoothing and Mapping出处: ICRA_2021 Shan T, Englot B, Ratti C, et al. LVI-SAM: T…

VINS-Mono 代码解析三、后端优化 第1部分
【5】后端优化
一、优化部分 前言:IMU预积分
1. 当前帧的位置、速度、旋转: 2. 相邻两帧之间的位置、速度、旋转的变化量 (IMU预积分) 3. IMU预积分的误差分析 4. IMU预积分误差的协方差和Jacobian计算 注意:IMU积分只要给定初始…

evo评测VINS-MONO---指标解析、算法精度分析(数据集)
上篇博文已通过代码修改、数据格式转换、数据测试实现使用evo评测VINS-MONO,该篇将详细介绍evo评测出的数据指标,以及VINS-MONO在数据集下的精度情况。
EVO评价指标介绍
绝对轨迹误差(ATE:abosulte trajectory error):直接计算相…

VINS-Mono 代码解析二、初始化 第2部分
书接上文!
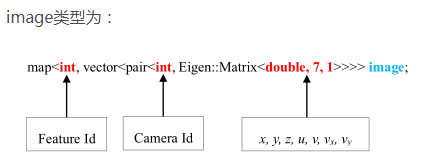
(4)对img信息进行处理( process() 核心!) map<int, vector<pair<int, Eigen::Matrix<double, 7, 1>>>> image;//(2)这个数据结构定义完之后,接下来就是往这个容器中放数据。//遍…

evo评测VINS-MONO---代码修改、数据格式转换、数据测试
数据格式(data formal):TUM/EuRoC/Kitti数据集
格式转换
修改VINS-mono轨迹保存代码
由于VINS-Mono保存的轨迹格式与EVO所使用的格式不同,VISNmono输出的轨迹格式不符合tum数据集和euroc数据集的格式。因此需要对源代码就行修改,更改保存轨迹的格式。…

项目实训 - 智能车系统 - 第六周记录
项目实训 - 智能车系统 - 第六周记录
日期:3.28 – 4.03
项目进度
本周工作进展:
完成了所有中间话题的移植将参数服务器改成读取文件的形式
(这周状态不太好,工作进展不是很大。,。)
1、剩余话题的移…
ROS保存路径,将cartographer的路径点/trajectory_node_list话题数据保存为txt和excel文件,并画出轨迹图
前言
按需求,我们在使用cartographer的时候不单单需要保存map数据,还需要保存carto计算出来的机器人轨迹,今天就来写一个保存路径list的程序吧
数据格式
我们先来看看carto输出的轨迹是什么格式的,如下
aa:~$ rostopic info /…

光模块中的DDM介绍
随着光模块的应用越来越广泛,光模块的速率、封装、功耗和功能也也向着高速率、体积小、低功率和多功能的方向去发展。今天我们要讲的就是光模块中的DDM功能。 什么是DDM? DDM(Digital Diagnostic Monitoring)数字诊断监控技…
关注人类司机危险驾驶的问题以及自动驾驶、智能交通、智慧城市
解决拥堵问题只能靠“限购”“限行”吗?如何把交通安全事故降低90%?我们离无人驾驶还有多远?未来城市会是什么样子?在最新出版的《智能交通:影响人类未来10—40年的重大变革》中,李彦宏系统阐述…

prometheus学习之搭建
Prometheus 都是基于客户端角度 拉就是server 定期从客户端拉取数据---------响应不及时 推就是 客户端主动推送数据给server—响应及时,但是很多推送导致server压力大 server收集数据,存储和查询,发送警报 pushgateway:server 无法直接监…
SLAM测评工具---evo安装与使用
evo简介
evo是一个很好的测评工具,它可以根据时间戳将轨迹进行对齐,同时可以将不同尺度的轨迹按照你指定的标准轨迹进行拉伸对齐,并可以算出均方差等评定参数,用于测评slam算法性能
目前支持 TUM KITTI Euroc 等格式。evo工具提…

主流VIO框架分析及VINS部分解析
本文为搜集的资料整理: C0包含位姿和运动信息;对于T0来说,不仅受rv10、rv11的视觉影响,也受rb01的IMU的影响。 上述方式繁琐,故引入因子图,便于思路梳理和理解。 引入因子图是为了方便宏观的把握SLAM的框架…

VINS-MONO理论学习---紧耦合后端非线性优化
基于滑动窗的紧耦合后端非线性优化:将视觉约束、IMU约束、闭环约束放到一个大的目标函数中进行非线性优化,求解出滑动窗口中所有帧的PVQ、bias等。
在视觉约束和IMU约束中,基本思想是找到优化状态向量,然后通过视觉残差和IMU测量…
VINS-MONO代码解读---基于滑动窗口的紧耦合后端非线性优化 optimization()+滑动窗slideWindow()
本讲是VINS最核心部分了,前面经历了
1)视觉跟踪feature_tracker、IMU预积分integrationBase类;
2)初始化中SFM纯视觉估计滑动窗中所有帧的位姿和3D路标点深度、SFM与IMU预积分松耦合对齐求解初始化参数。
在完成前面的初始化环…

VINS-MONO代码解读---初始化2:视觉惯性松耦合初始化 visualIntialAlign()
visualIntialAlign()函数视觉惯性联合初始化
这篇文章主要集中在讨论视觉部分和IMU部分之间的关联,如何对两部分进行对齐,使得系统完成初始化。 目录
理论:视觉IMU对齐流程
其中,步骤1的在线Cam到IMU的…

VINS-MONO代码解读---初始化1:视觉SFM详解 processImage()+initialStructure()
Estimator类 视觉部分流程图 本文将重点讲解ProcessImage()函数
1.检查两帧的视差判断是否为关键帧f_manager.addFeatureCheckParallax()在feature_manager.cpp中已经解释
2.IMU预积分 IntegrationBase 在 IMU离散中值预积分中解释
3.在线标定外参 Cal…
VINS-MONO代码解读---在线Cam到IMU的外参标定InitialEXRotation类
本问对estimator类中最主要的函数processImage()的相机到IMU的外参矩阵的进行代码讲解。
前面两讲知识储备主要讲了IMU预积分相关的integrationBase类以及图像特征点管理器feature_manager.cpp,本节将对processImage()…
VINS-MONO代码解读---特征点管理feature_manager.cpp
本文对estimator.cpp中的feature_manager.cpp进行介绍,主要是对特征点管理。 特征点管理器主要就是FeatureManager类 涉及到的类的成员函数:
一、FeatureManager、FeaturePerId、FeaturePerFrame
1、三者关系 f_manager是特征管理器类的对象
Feature…

VINS-MONO代码解读---状态估计器vins_estimator
本文主要介绍VINS的状态估计器模块(estimator),主要在代码中/vins_estimator节点的相关部分实现。
这个模块可以说是VINS的最核心模块,从论文的内容上来说,里面的内容包括了VINS的估计器初始化、基于滑动窗口的非线性…

VINS-MONO代码解读---前端feature_tracker
feature_tracker是vins的前端,它的目录在src/ feature_tracker下,功能主要是获取摄像头的图像帧,并按照事先设定的频率,把cur帧上满足要求的特征点以sensor_msg::PointCloudPtr的格式发布出去,以便RVIZ和vins——estim…
GPS从入门到放弃(十八)、多路径效应
一、概念
在GPS接收机接收卫星信号的过程中,除了接收到通过直线路径到达接收机的信号以外,还可能收到经接收机周围物体的反射再传播过来的卫星信号,这些反射的信号改变了传播方向、振幅、极化以及相位等,与直线信号产生叠加&…


ROS 中 bag、txt、csv 格式文件的详细转换 和 图片的提取
一、包(.bag)是怎么得到的 ?
rosbag record 命令是用于在ros系统中录取系统中其他ros节点发出来的 topic 的message。录取的的包可以使用 rosbag play 命令来回放,订阅这些消息的node节点就可以收到这些消息,进而执行对应的程序…

GPS从入门到放弃(二十一)、地球自转参数
地球自转参数(ERP: Earth rotation parameters)主要包括地球极点的位移和速率、UT1-UTC的时间差、以及由天文观测确定的一天的时间长度与 86400 秒之间的差值 LOD. 地球自转参数可以从ftp服务站 ftp://cddis.nasa.gov/gnss/products/ 下载。IGS提供的ERP…
项目实训 - 智能车系统 - 第九周记录
项目实训 - 智能车系统 - 第九周记录
日期:4.18 – 4.24
项目进度
本周工作进展:
删除项目中保留的ros相关的部分代码学习cmake编写重新编写项目中的CMakeLists.txt文件
1、删除ros代码
之前为了方便测试,在修改代码的时候并没有删除ro…


三维点云处理04-Voxel Grid Filter代码实现
三维点云处理04-Voxel Grid Filter代码实现
基础知识点
1.首先获得输入点云在各维度上的最大,最小值
2.设定leaf_size的大小
3.根据leaf_size的大小计算每个维度上栅格的数量D_x, D_y, D_z
4.对于输入点云中的每个点计算其i_x, i_y, i_z
5.由idx i_x i_y * D_x …


项目实训 - 智能车系统 - 第十周记录
项目实训 - 智能车系统 - 第十周记录
日期:4.25 – 5.1
项目进度
本周工作进展:
把相关项目移植到板子上,配置环境发现有性能问题,查性能瓶颈尝试配置交叉编译环境(太复杂了,失败了)
1、配…
【ROS无人驾驶系列】1 软件环境基础(ROS CMake) 上
【ROS无人驾驶系列】1 软件环境基础(ROS CMake) 上01 创建ROS的工作空间1.1 创建catkin工作空间1.2 编译工作空间1.3 设置环境变量1.4 检查环境变量02 功能包的创建03 功能包的源代码编写3.1 编写发布器节点(july_say_node.cpp)03…

Autoware使用(2)——地图创建与加载
Autoware使用(2)——地图创建与加载
1.创建点云地图
(1) 打开Autoware,在[Compulting]菜单栏中找到[Ndt_Mapping]选项并勾选。(2) 在[Simulation]菜单下按照之前教程1中所描述的数据播放方式播放数据,此时会在终端中看到计算处理信息输出(3) 在终端上可以两组数据…

【自动驾驶入门:从建模到跟随】 2 创建小车基础模型
【自动驾驶入门:从建模到跟随】2 创建小车基础模型准备工作:具备ROS基础知识(古月:ROS入门21讲) 自动驾驶入门:从建模到跟随 学习笔记
参考: https://github.com/czhherry/self-driving-vehicl…
DDPG自动驾驶横向控制项目调参过程
DDPG自动驾驶横向控制项目调参过程actor和critic网络的学习率OU噪声参数设置整体参数设置结果我做的一个DDPG的自动驾驶横向控制的项目,用的模拟器是Torcs。在调参过程中遇到了很多问题,在这里记录一下。actor和critic网络的学习率
一开始我按照大部分资…

【Transformer系列论文】TransFuser:端到端自动驾驶的多模态融合Transformer
Article
作者:Aditya Prakash, Kashyap Chitta, Andreas Geiger文献题目:TransFuser:端到端自动驾驶的多模态融合Transformer文献时间:2021文献链接:https://arxiv.org/abs/2104.09224
摘要
互补传感器的表征应该如…

ROS学习笔记(week1)
ROS学习笔记(week1)
1.What is ROS?
ROS Robot Operating System
2.ROS Philosophy
Peer to peer(点对点):Individual programs communicate over defined API (ROS messages, services, etc.).Distributed(分布式ÿ…
激光点云3D目标检测算法之CenterPoint
激光点云3D目标检测算法之CenterPoint 本文首发于公众号【DeepDriving】,欢迎关注。 前言
CenterPoint是CVPR 2021的论文《Center-based 3D Object Detection and Tracking》中提出的一个激光点云3D目标检测与跟踪算法框架,与以往算法不同的是ÿ…
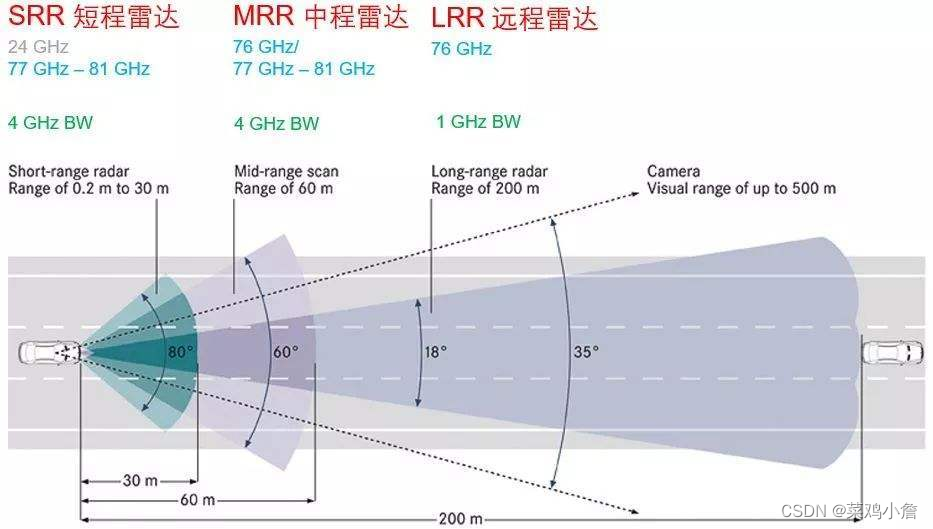
自动驾驶专题介绍 ———— 毫米波雷达
文章目录介绍工作原理特点性能参数应用厂家介绍 毫米波雷达是工作在毫米波波段探测的雷达,与普通雷达相似,是通过发射无线电信号并接收反射信号来测量物体间的距离。毫米波雷达工作频率为30~300GHz(波长为1 - 10mm),波长介于厘米波和光波之间…

使用Arduino和脉搏传感器监视心跳/脉搏/BPM速率
在本篇文章中,我们使用Arduino开发板和脉搏传感器(Pulse Sensor)设计了一款心跳/脉搏/BPM速率监视器。脉搏传感器连接到Arduino开发板以监控心跳/脉搏/BPM速率,然后将结果显示在20 * 4 LCD显示屏上。您也可以使用1602或其他形式的…
如何打造自动驾驶的数据闭环?
如何打造自动驾驶的数据闭环(1) 如何打造自动驾驶的数据闭环(2) 如何打造自动驾驶的数据闭环(3)
树莓派C++开发机器人智能小车(15)嵌入式QT界面按钮事件
我们要创建一个简单的QT程序,使用界面按钮打开关闭LED,通过这个小程序熟悉、练习一下嵌入式QT,然后再继续我们机器人小车项目。项目需要两个LED,其连接和LEDBuzzer项目一样,连线如下: 第一个LED引脚正极连接到wiringPi引脚0,负极引脚连接到物理引脚9(地线引脚)第二个L…

多传感器融合时的时间同步问题解决方案——PPS校准STM32内部RTC
关于STM32的RTC校准问题,网上讨论很多。个人认为可以分为外部校准和内部校准,外部校准一般采用的是GPS的PPS信号(主要是PPS信号基于原子钟,太准了),但是PPS信号如何对RTC进行校准,网上并没有相关…

Ubuntu20.04 通过DD命令克隆自动驾驶开发环境
第一、准备环境
双硬盘(Ubuntu20.04系统盘、存储镜像文件盘)
说明:本人机器是自动驾驶环境,所以系统有些大,约180G 第二、命令执行:
进入命令控制台:
获得root权限
sudo -s 第三、查看Ubun…

自动驾驶行业观察之2023上海车展-----整体发展趋势
1.行业趋势
新能源势不可挡。 本次车展上首发了150多款新车,约有100款是新能源车;跨国车企全面电动化,但日韩系布局相对缓慢;
2.自主品牌
品牌持续向上
本届车展自主品牌开始疯狂向高端内卷,高端化态度坚决 (包括仰…
coreldraw 与VB.NET
VB.NET 中使用coreldraw
Imports CorelDRAW Dim CdrApp As New CorelDRAW.Application CdrApp.Visible = True Dim doc As Document = CdrApp.ActiveDocument If (doc Is Nothing) Then doc = CdrApp.CreateDocument End If Dim lay As Layer = doc.ActiveLayer CdrApp.Unit =…

houdini 函数演示 group
Group Expression 使用表达式控制组 Group Combine 组运算
被修改组 组1 与组2的运算,被修改组可以是已有或是新 argc(primgroupmask(../null1,group*))
primgroupmask pointgroupmask 获取以group为前缀名的所有组
argc获取数组的数量 vex group_新组名 将点添…
houdini 函数演示 旋转2
copy sstamp 四元素矩阵
参看B站 四元素矩阵
1 fag fit11(sin(Timeptnum*0.1),-3.14/2,3.14/2); orient quaternion(ag,{1,0,0}); //quaternion(旋转角度,旋转轴方向)
porient 指定了方向 2 po dihedral({0,1,0},N); vr set(TimeP.x,90,0); pm …

【ROS】功能包创建
本文记录创建ROS功能包的过程,但是在创建功能包之前需要先创建ROS工作空间,如果不知道如何创建工作空间可以参看链接
创建过程
1 打开终端,进入自己的工作空间的src目录,输入以下命令,创建功能包
catkin_create_pkg…
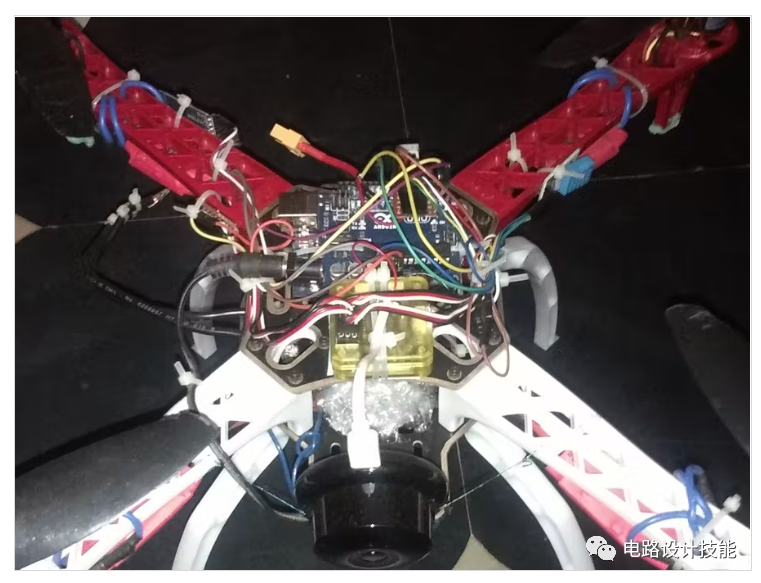
DIY自动驾驶无人机
带有多个传感器和一个由两个微控制器控制的无线摄像头的 Arduino Uno 自动驾驶无人机。
通常我们会看到使用射频遥控器控制的无人机,或者使用 GPS 模块通过给出正确方向来自动控制无人机的自动驾驶仪。但在我的项目中,我使用 Arduino Uno 以另一种方式处理事情。
该项目的主…
VINS-MONO代码解读---数据结构sensor_msgs
在看VINS-Mono的代码时,觉得非常有必要整理总结一下其中不同的数据结构,尤其是各种sensor_msgs的格式与具体含义。
具体详见以下链接: 数据结构: sensor_msgs ROS的sensor_msgs格式在http://wiki.ros.org/sensor_msgs有介绍。 sensor_msgs::…

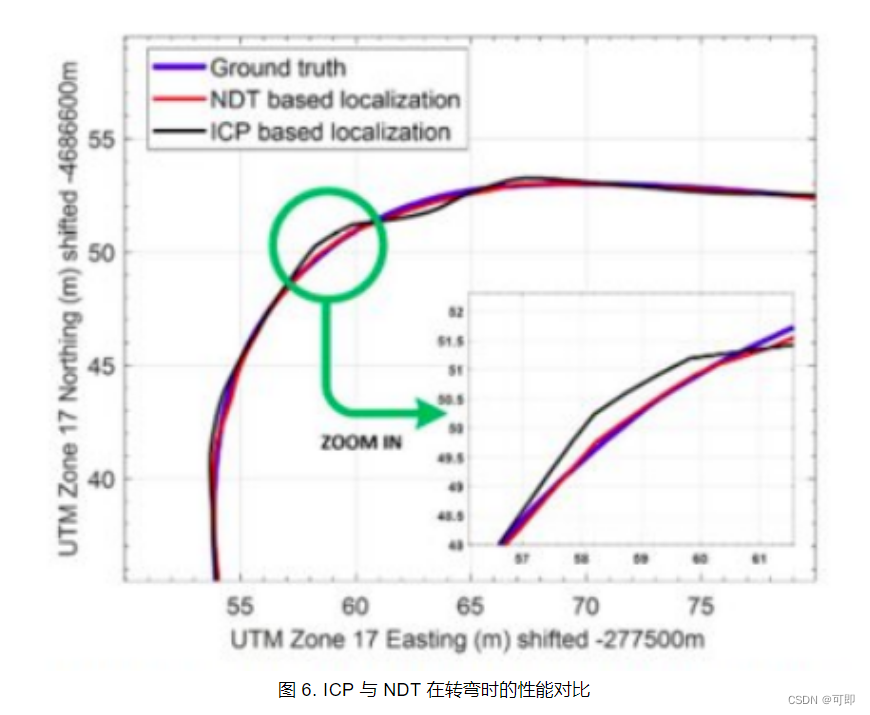
基于已知点云地图的NDT的激光SLAM定位
概述
对于L4级自动驾驶系统而言,定位模块通常会融合GNSS、IMU、轮速计(车辆底盘)、摄像头以及激光雷达odometry多种测量,使用滤波算法(EKF、UKF等)以获得平滑、厘米级别的绝对定位,其中基于高精…

EuRoC数据集介绍
数据集官网:https://projects.asl.ethz.ch/datasets/doku.php?idkmavvisualinertialdatasets
EuRoC数据集 微型飞行器(MAV)上收集的视觉惯性数据集
数据集格式 每个场景同时保存了 .bag 的 rosbag 文件和 .zip 的压缩文件,但是…

VINS-MONO实践
1.配置ros(运行VINS需要,记得换源,会快一些)
sudo apt-get install ros-melodic-cv-bridge ros-melodic-tf ros-melodic-message-filters ros-melodic-image-transport解释: cv-bridge在ROS图像消息和OpenCV图像之间转…

卡尔曼滤波推导+贝叶斯滤波推导+粒子滤波推导
一、Kalman Filter
1、前言 1、两个传感器测量同一个信号,为了减小误差我们可以采用取平均的方式,进一步的我们采用加权平均(由方差大小分配),加权平均是一种静态分配方式。方差是随外界环境而变的,加权值…
pytorch拟合函数
欢迎访问我的博客首页。 pytorch拟合函数1. 拟合一元一次函数1.1 自定义网络1.2 使用卷积网络2. 拟合一个数2.1 第一种方法2.2 第二种方法1. 拟合一元一次函数 拟合函数yaxbya\times xbyaxb,其中a1,b2a1,b2a1,b2。
1.1 自定义网络 import torch
import numpy as np…
如何学习ROS机器人?
本人计算机视觉小白一枚,最近刚刚入坑ROS机器人操作系统,下面分享一下自己觉得比较好用的学习资源,欢迎补充。
网页教程
1.百度搜索AUTOLABOR:进入开源ROS机器人学习官网:http://www.autolabor.com.cn/index。点击RO…
CMake生成库的管理
开源项目中有些文件生成库,供其他文件调用。当更改这些生成库的文件代码后,如果全部重新make,很麻烦,其实只要make这些库文件即可。 比如ORB-SLAM2中的各个.cc文件,最终都生成/lib/libORB_SLAM2.so,然后连接…
采用camera_calibration进行双目相机标定
之前使用kalibr工具标定双目相机获得相机相关参数,但实验看来效果不太好,故尝试采用camera_calibration进行双目相机标定,ROS 官方提供了camera_calibration 包,通过这个包可以使用棋盘标定板对单目和双目相机进行标定。
准备工作
1.系统环境:ubuntu20.04
2.安装 camer…
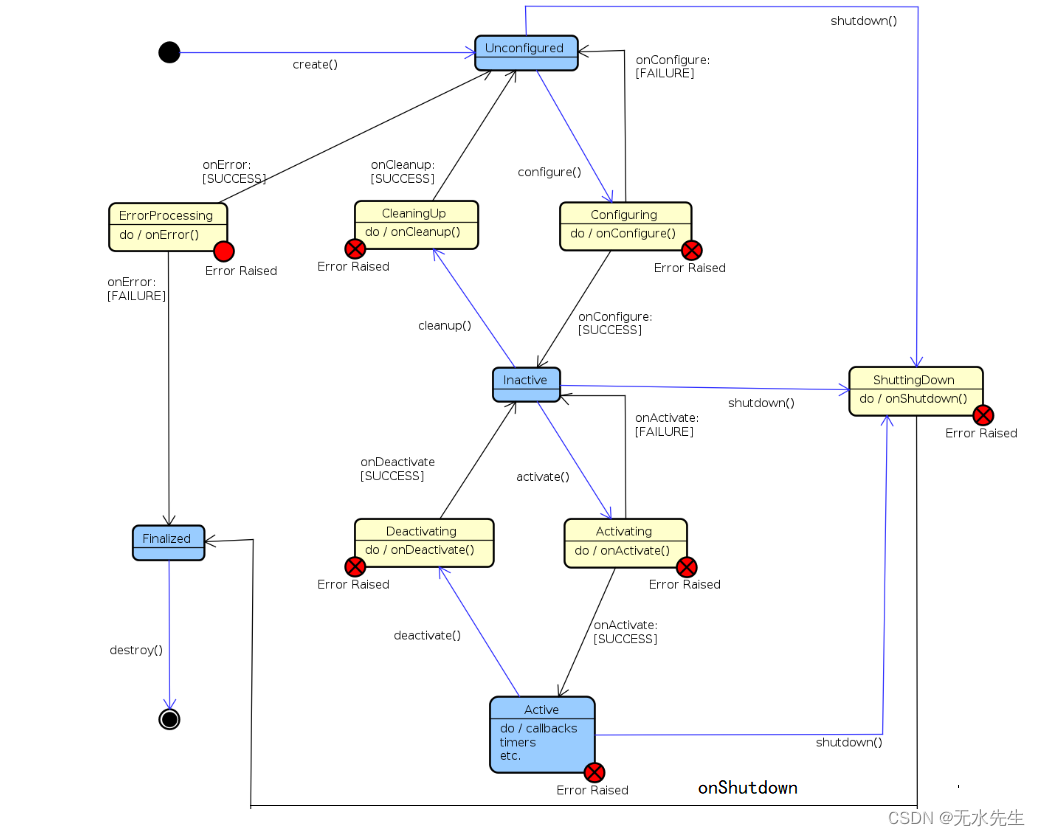
【ROS2设计】节点的生命周期
一、说明 本文描述了具有托管生命周期的节点的概念。它旨在记录一些支持管理 ROS 2 生命周期节点的选项。它的编写考虑了 ROS 2 C 客户端库的现有设计,尤其是执行程序的当前设计。 二、背景 节点的托管生命周期允许更好地控制 ROS 系统的状态。它将允许 roslaunch 在…
AUTOSAR从入门到精通-【应用篇】基于 AUTOSAR 的纯电动汽车整车控制系统软件开发与功能映射研究
目录
前言
AUTOSAR 发展现状
功能映射研究
相关技术基础
2.1 AUTOSAR 技术基础 2.1.1 软件组件
2021年道路运输企业主要负责人免费试题及道路运输企业主要负责人模拟考试
题库来源:安全生产模拟考试一点通公众号小程序
安全生产模拟考试一点通:道路运输企业主要负责人免费试题是安全生产模拟考试一点通生成的,道路运输企业主要负责人证模拟考试题库是根据道路运输企业主要负责人最新版教材汇编出道路运输企业主…
ROS-3DSLAM(七)lvi-sam源代码阅读5
2021SCSDUSC
(七)lvi-sam源代码阅读5
写在前面 团队进展与计划
a. 进展
首先,我们团队分析的是LVI-SAM两大模块中的lidar模块。如今,我们已经完成了lidar模块中/lvi_sam_imuPreintegration(IMU预积分节点),/lvi…
在ROS工作空间中仅编译某一个单一功能包
在ROS工作空间中仅编译某一个单一功能包
当我们建立的工作空间下有多个不同的功能包时,如果直接使用catkin_make命令进行编译,电脑会默认将工作空间下的所有功能包一同进行编译,但大多数时候我们仅仅需要编译某一个单一功能包,面…
rf2o_laser_odometry运行警告Waiting for laser_scans....
项目场景:
rf2o是我们常用的一个功能包,其功能主要就是在缺少轮式里程计的时候用雷达数据计算机器人的运动,模拟一个里程计的功能 问题描述
最近搞rf2o的过程中遇到了一个问题,它老是警告我,会一直输出
[ WARN] [xx…

Autoware使用(1)——数据录制与回放
Autoware使用(1)——数据录制与回放
1.数据录制
(1)启动激光雷雷达:启动Autoware,找到上菜单栏的[Sensing]菜单打开。(2)找到左侧[LIDARs]菜单,并找到对应的传感器器型号(此处以Velodyne VLP16为例), 点击[config]按钮,找到路径:/home/up/Autoware/ros/src/sensing/drivers/l…

Autoware使用(4)——使用激光雷达进行目标检测
Autoware使用(4)——使用激光雷达进行目标检测
本节教程较为简单,但是需要在前面模拟定位的基础上完成,因此对模拟定位还不了解的同学可以翻看我之前博文。
(1)在上⼀节真实定位或者模拟定位的前提之下,找到菜单栏[C…

ROS及C++中如何记录程序运行时间并使用rqt_plot工具实时绘制运行时间
ROS及C中如何记录程序运行时间并使用rqt_plot工具实时绘制运行时间
ROS及C中常用的记录时间的方式
示例1:C中简单实现
#include <time.h>
#include <iostream>
clock_t start, finish;
double duration;
start clock();
/*
主题程序执行部分
*/
fin…
问题解决:roscore报错: ‘ascii’ codec can’t decode byte 0xe6 in position 13: ordinal not in range(128)
问题解决:使用ROS进行编译时报错: ‘ascii’ codec can’t decode byte 0xe6 in position 13: ordinal not in range(128)
问题描述
在使用roscore或者是编译rospackage时,新手可能会遇到如下错误:
Value error: ascii codec cant decode …
PCL学习笔记——PCD(点云数据)文件格式
PCL学习笔记——PCD(点云数据)文件格式
pcd文件数据举例
# .PCD v.7 - Point Cloud Data file format
VERSION .7
FIELDS x y z rgb
SIZE 4 4 4 4
TYPE F FFF
COUNT 1 1 1 1
WIDTH 213
HEIGHT 1
VIEWPOINT 0 0 0 1 0 0 0
POINTS 213
DATA ascii
0.93773 0.33763 0…
深度解析ROS中的launch文件
深度解析ROS中的launch文件
1. launch文件简介
从 ROS 角度来看,机器人系统就是一堆 node 和 topic (再添加一些 parameter, service 等)构成的网络(rosgraph),其中每个 node 都可以完成一定的功能。通常…

Linux环境下传感器时间同步处理方法—— 比较法 + ROS自带多传感器时间同步机制
感谢:ros多传感器时间同步(message_filters)_hongge_smile的博客-CSDN博客_ros多传感器时间同步 一、VINS常用的方法 std::queue buf1;
std::queue buf2;
std::thread process;
//typedef M 传感器数据类型,比如sensor_msg::PointCloud2、sensor_msg::Im…

Inverse Tone Mapping
逆色调映射方法(inverse Tone Mapping Operator, iTMO或reverse Tone Mapping Operator, rTMO)
SDR转化HDR过程的算法称为扩展算子(Expand Operator)
逆色调映射算法将SDR内容变换为HDR内容需要经过以下几个步骤: 1、…
物联网卡如何助力物流产业发展
物联网卡发展至今,现如今物联网信息已经成为大家关注的焦点。物联网卡作为维系硬件设备智能运转的载体,推动企业发展的助力至关重要。但仍有企业对于设备能否使用物联网卡,该如何使用物联网卡为企业助力等一系列相关问题不甚了解。 在智能…

ROS的launch文件创建
1 使用launch文件 Launch文件是ROS提供的,可以同时运行多个nodes的文件。Launch文件以一种特殊的XML格式编写,在ROS packages中使用广泛。 创建launch功能包 首先在工作空间src下面创建一个功能包 $catkin_cteate_pkg package_launch (里面有cmakelistx和…
智驾算力芯片市场仍处于「波动」周期,Momenta曝光自研NPU
用「冷热不均」来形容当下的汽车芯片赛道,再合适不过了。 本周,英伟达公布的第二财季(5-7月)营收达到创纪录的135亿美元,大幅超出了此前市场普遍预期的略高于110亿美元,同比增速更是达到了101%。 其中&…

AutoCV第十一课:DL基础
目录 DL基础前言1. BP训练mnist2. 权重初始化理论分析总结 DL基础
前言 手写AI推出的全新保姆级从零手写自动驾驶CV课程,链接。记录下个人学习笔记,仅供自己参考。 本次课程我们来了解下 BP 反向传播和学习权重初始化相关知识 课程大纲可看下面的思维导…

五分钟通俗理解自动驾驶
大家好,我是良许。
这几年,自动驾驶这个概念非常火热,无论是百度还是谷歌,都做出了还不错的原型机,但是你真的知道什么是自动驾驶吗?
本文就花 5 分钟左右的时间,向大家科普一下什么是自动驾驶…
激光雷达(LDS)技术原理解释及实现过程
一、激光雷达(LDS)简介 1.激光雷达应用举例: 现在自主移动机器人领域非常火爆,无人车、无人飞机、水下机器人、仓储机器人、扫地机等应用层出不穷。激光雷达传感器是地面移动机器人的标配,一些空中机器人也必须使用激光…

收购Arriver,PK英伟达?高通中国招募智驾系统软件团队
对于汽车行业来说,年度新车销量规模的「天花板」效应,意味着,对于零部件供应商来说,必须横向拓展更多的产品线。 而进入智能化时代,软硬一体成为另一种做大做强的新模式。尽管,从车企和整车电子架构升级的角…
OpenPCDet系列 | 8.4 nuScenes数据集数据调用和数据分析
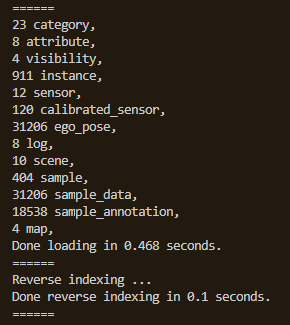
文章目录 1. 对数据集遍历1.1 统计mini版本的nuScenes各模态数据和关键帧的数量1.2 单独遍历lidar模态数据1.3 遍历scene统计数据1.4 遍历sample统计数据1.5 遍历sample_data统计数据1.6 数据集的底层结构2. 对数据集可视化2.1 render_sample和render_sample_data2.2 nusc.rend…
近万字解释:智能驾驶系统功能如何定义
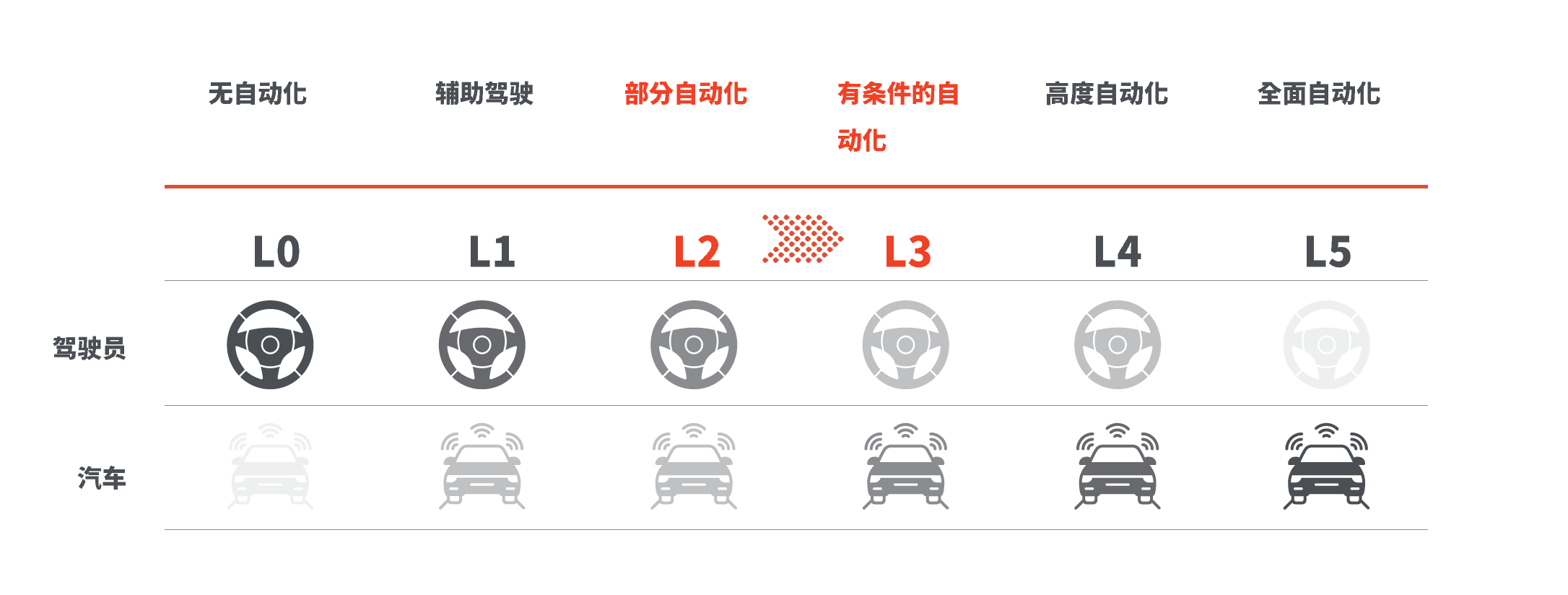
本文描述了对已提出装配智能驾驶的样车概念ADS功能的识别。该分析侧重于SAE L3-5级的ADS系统,如谷歌的自动驾驶汽车项目(即Waymo),以及其他类似项目,侧重于下一代自动化。这一步很关键,因为样车概念ADS的功能被用来识别ODD和OEDR,开发初步测试和/或评估方法,并评估FS和…

【Apollo学习笔记】——规划模块TASK之PATH_REUSE_DECIDER
文章目录 前言PATH_REUSE_DECIDER功能简介PATH_REUSE_DECIDER相关配置PATH_REUSE_DECIDER总体流程PATH_REUSE_DECIDER相关子函数IsCollisionFreeTrimHistoryPathIsIgnoredBlockingObstacle和GetBlockingObstacleS Else参考 前言
在Apollo星火计划学习笔记——Apollo路径规划算…

项目实训 - 智能车系统 - 第二周记录
项目实训 - 智能车系统 - 第二周记录
日期:2.28 – 3.06
项目进度
本周工作进展:
通信框架的完善及完成完成了第一个话题的移植
1、通信框架选择
lio-sam项目自身是基于ros的项目,进程间使用的通信机制主要是ros中的topic话题通信机制。…

项目实训 - 智能车系统 - 第四周记录
项目实训 - 智能车系统 - 第四周记录
日期:3.14 – 3.20
项目进度
本周工作进展:
进行TF部分的部分移植(本周主要完成了TF相关类型,函数的处理)
1、针对项目进行TF总体分析
本周本来打算继续按照之前的思路进行话…


年度总结,今年关于自动驾驶我想说的
2021年本来没什么要总结的,但是看到下面这个,我来了兴趣,我今年自己本身也在关注自动驾驶的一些事情,那就针对自动驾驶做一个我今年的总结吧!
最近CSDN首页头条推荐有这样一个 …
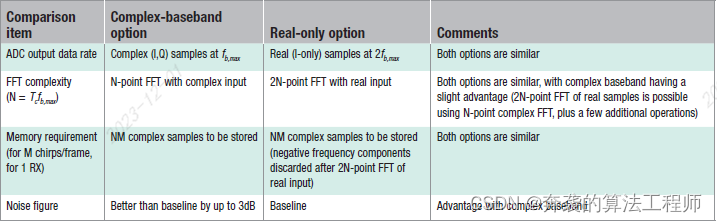
在FMCW雷达系统使用复基带架构(TI文档)
摘要 本文阐述了复基带架构在调频连续波(FMCW)雷达系统中的优势。典型的雷达前端实现使用带有真实基带和模数转换器(ADC)链的真实混频器。然而,在FMCW雷达的背景下,使用正交混频器和复基带架构可以发挥性能优势。该架构已在德州仪器的76 - 81 GHz全集成互…
9月7日,每日信息差
第一、贝莱德回应关闭中国主题基金。对此,贝莱德回应称,由于中国灵活股票基金目前的管理规模较小,经充分考虑投资者和股东的利益后,贝莱德对该基金做出了清盘的决定
第二、国际奥委会宣布成立电子竞技委员会
第三、快手旗下房产…

项目实训 - 智能车系统 - 第八周记录
项目实训 - 智能车系统 - 第八周记录
日期:4.11 – 4.17
项目进度
本周工作进展:
完成了雷达驱动的编写(未测试)完成imu驱动的编写(未测试)与可视化部分进行对接
1、速腾rslidar驱动编写(二…
树莓派智能小车的购买选择、硬件原理、程序编写全套教程
一、小车器件购买选型
教程里是购买的淘宝上集成好的小车器件。另外自己也买了一些散件配置了一辆自己的小车。 https://detail.tmall.com/item.htm?id608554421638&spma1z09.2.0.0.7e012e8d3NEMy0&_u12kf16b6b4b
组件包括: 1、小车底板(2个…
【逐函数详细讲解ORB_SLAM2算法和C++代码|Map|1-14】
Map类是ORB_SLAM2算法的地图管理模块。它负责存储和管理地图中的关键帧(KeyFrame)和地图点(MapPoint),并提供了添加、删除和查询地图中的关键帧和地图点的方法。
以下是Map类的主要方法及其C++用法: AddKeyFrame(KeyFrame* pKF):向地图中添加关键帧。AddMapPoint(MapPo…

ORB_SLAM2 源码解析 地图点、关键帧和图结构(四)
目录 一、地图点
地图点代表性描述子的计算 地图点法线朝向的计算
地图点和特征点的区别
生成地图点
二、关键帧
什么是关键帧 为什么需要关键帧
如何选择关键帧
关键帧的类型及更新连接关系
父子关键帧
更新连接关系
更新局部关键帧
三、共视图 本质图 扩展树 共视…
【Matlab TWVRP】A_star算法求解带时间窗和任务软时间窗多车场多车型车辆路径问题【含源码 1561期】
一、代码运行视频(哔哩哔哩)
【Matlab TWVRP】A_star算法求解带时间窗和任务软时间窗多车场多车型车辆路径问题【含源码 1561期】
二、matlab版本及参考文献
1 matlab版本 2014a
2 参考文献 [1]王永成,杨明漾,张国辉.基于改进A星算法对自动导引小车路…

运行雷达驱动进行数据传输时出现了以下错误(已解决)
待解决。
_____________________________________________________________
已解决
首先看红字部分,说啥?它说进程在home/ls/leishen_ws……的driver_node处中断。这个lidar_driver_node是驱动生成的一个节点为了和ROS对接。让我疑惑的是我对驱动的编…
2021年机械式停车设备司机考试及机械式停车设备司机新版试题
题库来源:安全生产模拟考试一点通公众号小程序
安全生产模拟考试一点通:2021年机械式停车设备司机考试为正在备考机械式停车设备司机操作证的学员准备的理论考试专题,每个月更新的机械式停车设备司机新版试题祝您顺利通过机械式停车设备司机…
商用车自动驾驶线控底盘测试报告
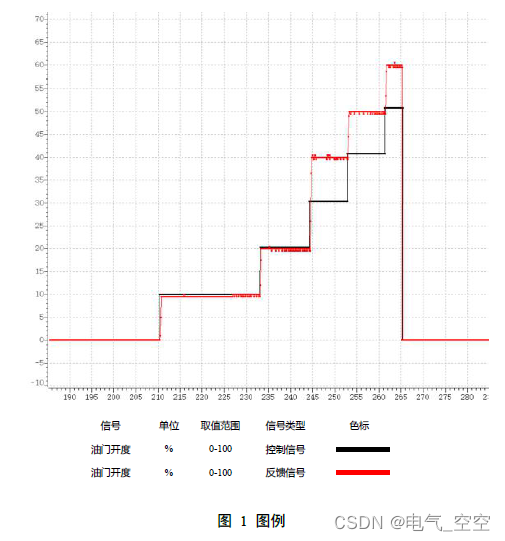
一.概述 商用车线控底盘主要用于接收控制指令,完成相应的驱动、档位、制动、转向、声光等动作,从而实现自动驾驶功能。 底盘线控系统测试目的是对驾驶模式(Drive Mode)、油门(Throttle)、档位&a…
Yolov3训练自己数据的步骤
安装并配置yolov3 官网链接:https://pjreddie.com/darknet/yolo/ 1、下载并安装yolo: git clone https://github.com/pjreddie/darknet cd darknet 修改darknet文件夹中的Makefile文件,使用GPU训练令GPU1,CUDNN1 G…

ROS-3DSLAM(十三)lvi-sam源代码阅读11 —— visual_loop阅读4 + ORB-SLAM初探
2021SCSDUSC
(十三)lvi-sam源代码阅读11 —— visual_loop阅读4 ORB-SLAM初探
visual_loop
DBoW文件夹
DBoW内的内容主要跟词袋模型的部分相关,是回环检测中用于匹配回环点的重要步骤。
项目中DBoW节点,应用的一个SLAM的模型…


项目实训 - 智能车系统 - 第十二周记录
项目实训 - 智能车系统 - 第十二周记录
日期:5.9 – 5.15
项目进度
本周工作进展:
修改信号量销毁(如果不是第一次创建,不赋值 修改lastnumbernownumber) 与可视化对接信号量的一系列问题测试雷达雷达驱动测试总体…

物联网·物联网接入平台
1995年比尔盖兹在《未来之路》一书中开启物联网起源1999年MIT(麻省理工)Auto-ID Center提出物联网概念2003年沃尔玛开始在其零售渠道推行物联网技术2005年国际电信联盟(ITU)发布了《ITU互联网报告2005:物联网》
近年来…
ROS-3DSLAM(十四)lvi-sam源代码阅读12 —— visual_loop阅读5
2021SCSDUSC
(十四)lvi-sam源代码阅读12 —— visual_loop阅读5
visual_loop
loop_detection_node 1
继续上次的分析,回到loop_detection_node文件中,loopDetector将项目中预置的二进制字典集加载了进来并进行了初始化。
之后…

ROS保存RBGD的深度图像、RGB图像
前言
想要采集一些深度图和RGB图像,且两者是一一对应的,即一张深度图对应一张RGB图像,于是就有了以下的程序。
相关准备
我用的深度摄像头是奥比中光的摄像头,Ubuntu16的好像可以直接用sudo apt-get install ros-xxxx进行下载&…

ICRA2020开源项目DF-VO的BUG笔记
前言
害,我本来是Ubuntu18win10的双系统的,结果昨天在装软件的时候直接把ubuntu搞崩了,直接很多软件被删掉了。加上我本身很讨厌ubuntu18的个别设定,索性直接重装了Ubuntu20。
因为要运行DF-VO,所以要安装相应的环境…
gazebo小车仿真时遇到问题:没有cmd_vel和odom话题
Gazebo键盘控制小车不动,发现没有cmd_vel和odom话题
在做ros机器人开发实践中的gazebo仿真时,改了一个四轮(两驱)的长方体小车,遇到了一个问题,即键盘控制小车没有反应,查看rostopic࿰…

【菠萝狗四足机器人】二次开发教程--第三章 【腿部校准和步态效果调试】
腿部校准和步态效果调试1 前言2 腿部调中(0位校准)3 步态效果调试3.1 重心标定3.2 自动重心补偿量调节4 结束1 前言
承接上次的教程,本次文章,将教你怎么对 Py-apple Dynamics 6.5 及 6.5 以后版本的软件进行腿部校准(…
(01)ORB-SLAM2源码无死角解析-(38) EPnP 算法原理详解→理论基础二:分情况求得beta初始解
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/de…
(01)ORB-SLAM2源码无死角解析-(40) EPnP 算法原理详解→理论基础四:QR分解(豪斯霍尔德Householder变换)
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下: (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/123092196 文末正下方中心提供了本人 联系…
【无2021年电气试验考试题及电气试验考试题库
题库来源:安全生产模拟考试一点通公众号小程序
安全生产模拟考试一点通:电气试验考试题根据新电气试验考试大纲要求,安全生产模拟考试一点通将电气试验模拟考试试题进行汇编,组成一套电气试验全真模拟考试试题,学员可…
智能座舱中的人工智能数据
智能汽车——推动变革与盈利的利刃
对于汽车公司而言,投资于人工智能解决方案从未显得如此关键。据 Tractica 预测,到 2025 年,汽车 AI 硬件、软件和服务的市场规模将从 2017 年的 12 亿美元上升至 265 亿美元。该行业具有巨大的变革潜力&am…

姿态估计1-02:FSA-Net(头部姿态估算)-源码训练测试-报错解决
以下链接是个人关于FSA-Net(头部姿态估算) 所有见解,如有错误欢迎大家指出,我会第一时间纠正。有兴趣的朋友可以加微信:17575010159 相互讨论技术。若是帮助到了你什么,一定要记得点赞!因为这是对我最大的鼓励。文末附…
ubuntu20运行A-LOAM记录
前言
大致看了一下ORB-SLAM、DF-VO等SLAM相关项目,也围绕着DF-VO做了一些修改,现在研二,也该为自己的未来作打算了,看了一下求职的信息,其实给我的感觉招雷达SLAM的会比视觉SLAM的要多,稍微统计了一下&…
【工程车远程监控方案】TSINGSEE车载监控平台助力安全生产
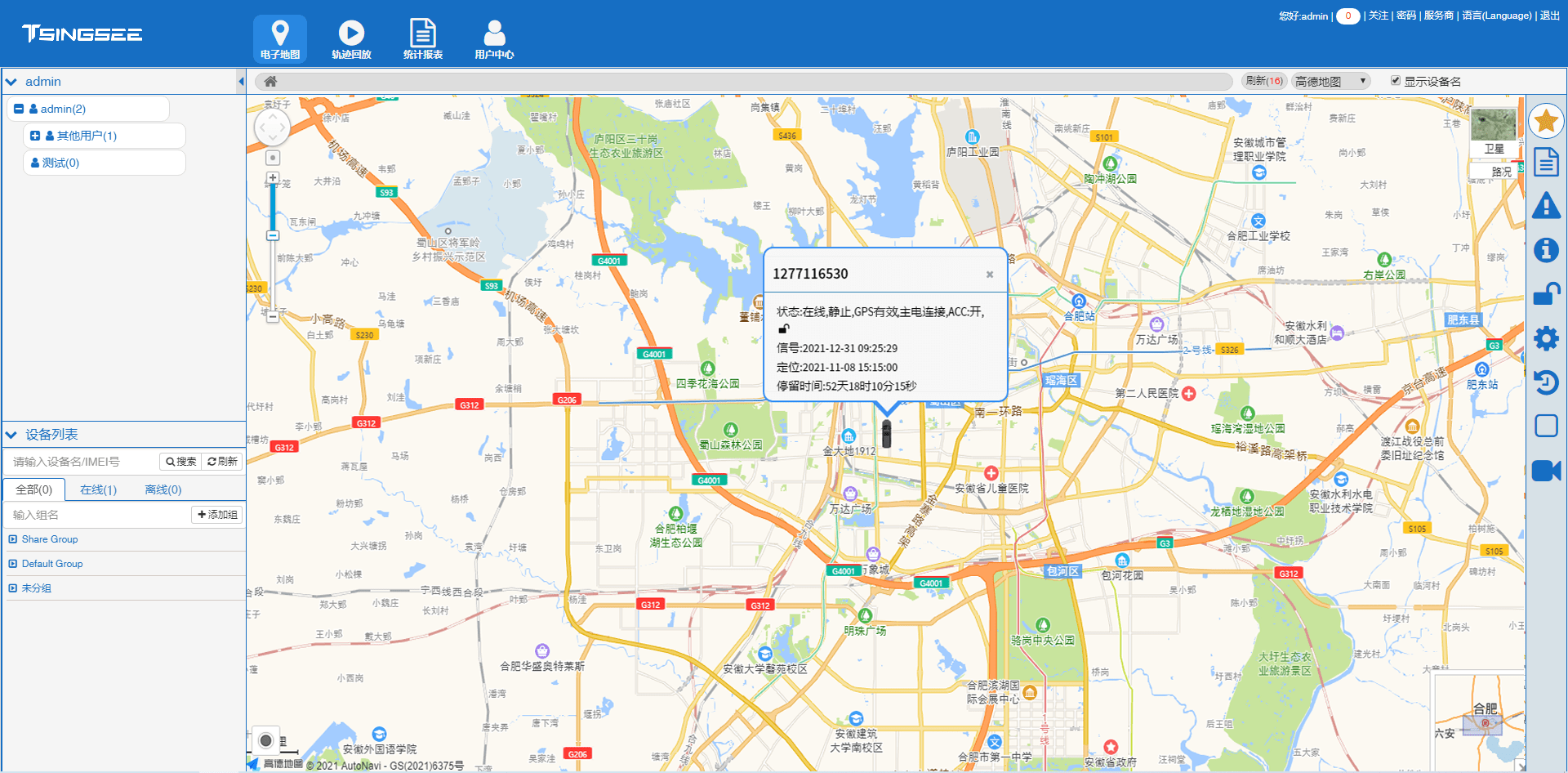
随着我国“新基建”战略的布局深入和持续开展,各种工程车的投入应用呈现爆发式增长,随之而来的难题是如何对工程车队进行高效、智能、科学地管理。工地施工作业整体环境复杂、人员较多、且工程车辆本身体型较大,盲区众多,极易发生…
cartographer接入2D雷达laser+odom+imu实时建图
前言
书接上回,我们用laserimu进行了实时建图,接下来我们来加一下odom。 接下来的首先是laserodom进行建图 最后再进行laserimuodom进行建图
1 接入odom
1.1 odom的驱动
我手上暂时没有轮式里程计,目前先用rf2o生成里程计数据接入&#x…
cartographer接入2D雷达laser+imu实时建图
文章目录前言1 接入laser1.1 修改laser启动文件1.2 修改demo_revo_lds.launch文件2 接入imu2.1 修改revo_lds.lua2.2修改imu启动文件3 发生过的报错4 实验发现前言
最近也是需要稍微看一下cartographer,然后用来跑2D建图,且需要融入imu数据
这篇文章也…
8.13 校招 内推 面经
绿泡泡: neituijunsir 交流裙, 内推/实习/校招汇总表格 1、自动驾驶一周资讯 - 比亚迪第500万辆新能源车下线,上汽通用拟于近期组建本土软件团队,理想发布2023年第二季度财报
自动驾驶一周资讯 - 比亚迪第500万辆新能源车下线…
摄像头标定与畸变矫正
1.基础知识 成像的过程实质上是几个坐标系的转换。首先空间中的一点由 世界坐标系 转换到 摄像机坐标系 ,然后再将其投影到成像平面 ( 图像物理坐标系 ) ,最后再将成像平面上的数据转换到图像平面 ( 图像像素坐标系 ) 。
2. 什么是摄像头参数
1&#x…
史上最简SLAM零基础解读(3) - 白话来说SVD奇异值分解(2)→超定方程求解,最小奇异值特征为最优解
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始 有兴趣的朋友可以加微信 17575010159 相互讨论技术 - 文末公众号也可关注 一、前言
在讲解超定方程求解之前,以及为什么最小奇异值对应的特征特征向量为最优解之前,我们需要知道以下知识&…
(01)ORB-SLAM2源码无死角解析-(23) 单目SFM地图初始化→CreateInitialMapMonocular()-总体流程
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

黑芝麻智能助力亿咖通·天穹Pro行泊一体智能驾驶计算平台正式量产
11月1日,亿咖通科技旗下首款智能驾驶计算平台——亿咖通天穹Pro行泊一体智能驾驶平台已向客户开始正式量产交付。亿咖通天穹行泊一体智能驾驶计算平台是亿咖通科技基于黑芝麻智能华山二号A1000,由双方合作研发并推出的具备行泊一体能力的智能驾驶解决方案…
毫米波雷达实时采集教
https://www.cnblogs.com/dhyc/p/10510876.html
毫米波雷达实时采集教程----
以及好网站总结:资料分享——RSP1 多普勒雷达开发套件

OpenPCDet系列 | 4.4 DataProcessor点云数据处理模块解析
文章目录 DataProcessor模块解析1. mask_points_and_boxes_outside_range2. shuffle_points3. transform_points_to_voxels DataProcessor模块解析
在对batch_data的处理中,经过了point_feature_encoder模块处理后,就轮到了进行data_processor处理。在d…

基于MDK创建纯汇编语言的STM32工程
文章目录一、新建项目二、编写代码进行测试三、查看.hex文件四、参考资料一、新建项目
keil5不是在file里创新项目,而是在project里,运行keil5并新建项目 接下来设置路径,项目名称随便填,保存 根据自己的硬件设备选择࿰…

项目实训 - 智能车系统 - 第七周记录
项目实训 - 智能车系统 - 第七周记录
日期:4.04 – 4.10
项目进度
本周工作进展:
更换了底层的通信框架(shm)熟悉速腾雷达驱动,以及ros相关驱动,为二次开发驱动做准备
1、更换底层通信框架
上周解决的…
RealSenseD435i (一):Ubuntu18.04 下的安装、使用和bag录制 ,且解决 undefined symbol 问题(最简单的方法)
注意 realsense-ros 要和 librealsense 版本匹配,realsense-ros 2.2.11 对应的 Realsense SDK 为 librealsense 2.31 .0,否则后面会出现让人崩溃的问题。 其中 realsense-ros 的下载如下:https://download.csdn.net/download/hltt3838/36063617 删除之前安装的RealSense库文…
项目实训 - 智能车系统 - 第一周记录
项目实训 - 智能车系统 - 第一周记录
日期:2.21 – 2.27
项目进度
本周是新学期的第一周,这周的主要任务是项目实训选题答辩。我们小组的项目名称是智能车系统。该项目承接上学期软件创新与实践课程的lvi-sam项目,并在此基础上进行完善&am…
ROS中Marker参数含义详解
ROS中Marker参数含义详解
//各种标志物类型的定义,每一个的具体介绍和形状可以到这里查看:
http: //wiki.ros.org/rviz/DisplayTypes/Marker
https://blog.csdn.net/u013834525/article/details/80447931
https://github.com/PickNikRobotics/rviz_visu…

基于Frenet坐标系的智能驾驶运动规划方法
基于Frenet坐标系的智能驾驶运动规划方法 文章目录基于Frenet坐标系的智能驾驶运动规划方法Frenet坐标系基本概念及坐标系建立Frenet坐标系优势横纵向轨迹解耦规划纵向轨迹规划横向轨迹规划基于车辆约束的最优轨迹选择Baidu的State Lattice 方法Frenet坐标系基本概念及坐标系建…
ubuntu下gazebo加载很慢解决办法
ubuntu下gazebo加载很慢解决办法
前言
刚安装好 rosrosros 后,在终端输入命令
gazebo启动 gazebogazebogazebo, 会发现 gazebogazebogazebo 启动很慢或者黑屏,这是为什么尼? 是因为 gazebogazebogazebo 中的模型需要连接国外网站进行加载,…

(九) carla中的全局路径规划
(九) carla中的全局路径规划
前言
从本节开始,学习并记录 carlacarlacarla 中自带的车辆自主导航框架及算法研究。首先先学习规划模块。 路径规划对于一辆无人驾驶车辆来说就是根据给定的环境模型,在一定的约束条件下规划出一条连接当前位置和目标位置…

ROS-3DSLAM(十六)lvi-sam项目总结
2021SCSDUSC
学习内容概览
本次的项目lvi-sam主要分为两个大的模块:lidar模块和visual模块。我们小组学习先进行了lidar模块的学习,然后进行的visual模块。每个模块都分成了若干小的部分,分给每个组员主要负责,学习完成后进行组…
自动驾驶:路径规划概述
自动驾驶:路径规划概述 全局路径规划Dijkstra算法A*算法RRT(随机快速探索树)算法PRM(概率路线图)算法 局部路径规划DWA(动态窗口法)算法TEB(时间弹性带)算法Lattice Plan…
(01)ORB-SLAM2源码无死角解析-(29) ORB特征匹配→ORBmatcher,汉明距离(单目初始化为例)
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
SLAM从入门到精通(基于传感器的闭环控制仿真)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing 163.com】 前面我们对底盘做了控制,对传感器数据也进行了读取,但是目前为止还没有做过一个完整的ros仿真程序。在这仿真中,…

项目实训 - 智能车系统 - 第五周记录
项目实训 - 智能车系统 - 第五周记录
日期:3.21 – 3.27
项目进度
本周工作进展:
完成TF部分的移植(本周主要完成了TF消息发送、转换、发布的功能)
1、修改imu和map节点中与tf相关的类、函数
首先根据上周摘出来的tf相关代码…

图像分类任务介绍线性分类器(上)
图像分类任务介绍&线性分类器(上)机器视觉(Computer Vision)图像分类数据驱动的图像分类方法1. 线性分类器2. 线性分类器的权值3. 线性分类器的决策边界4. 损失函数定义5. 多类支撑向量机损失机器视觉(Computer Vi…

MultiPath: Multiple Probabilistic Anchor Trajectory Hypotheses for Behavior Prediction
背景假设:
A fundamental aspect of future state prediction is that it is inherently stochastic, as agents cannot know each other’s motivations 【CC】这里假设我们是无法正真知道其他agnent的行为,跟RL计算纳什均衡思路不一样,后者…

辅助驾驶功能开发-功能规范篇(16)-2-领航辅助系统NAP-巡航跟车基础功能
接上篇博文 2.3.2.巡航跟车基础功能 巡航跟车基础功能介绍辅助驾驶系统的车速设定,车间时距设定,纵向定速巡航、跟车加减速、起停,横向居中控制,弯道控制等逻辑。
前置条件:
(1)NOA功能激活;
2.3.2.1.车速调节
1)激活时初始显示 中控屏设置界面有“融合限速设置”的开…
2021-10-31 2021年道路运输企业主要负责人考试内容及道路运输企业主要负责人最新解析
题库来源:安全生产模拟考试一点通公众号小程序
安全生产模拟考试一点通:道路运输企业主要负责人考试内容是安全生产模拟考试一点通总题库中生成的一套道路运输企业主要负责人最新解析,安全生产模拟考试一点通上道路运输企业主要负责人作业手…
智能驾驶商业化落地也在快速渗透,开始走向量产时代
⽆监督预训练技术
(1)超⼤数据规模和模型 size 的语⾳⽆监督预训练技术值得关注,语⾳⽆监督预训练的 BERT 已经出现 (Wav2vec2.0/Hubert), 语⾳⽆监督预训练的 GPT-3 很可能在 2022 年到来。
(2)多模态语…

机器人系统常用工具集
ROS(https://www.ros.org/) 版本
参数
资料 Noetic Ninjemys noetic/Installation/Ubuntu - ROS Wiki Humble Hawksbill Installation — ROS 2 Documentation: Humble documentation Webots(https://www.cyberbotics.com/) 版本
参数
资料
R2022b
GUI(Qt)、物理引…

25G SFP28光模块相关知识
5G时代的到来,相关的光通信技术也在快速发展,相比别的光模块,25G光模块的应用更广。25G以太网技术为数据中心带来的最大的优势是能够将带宽和端口密度最大化,并且它也能采用25Gb/s的单通道物理层技术实现100Gb的数据传输ÿ…
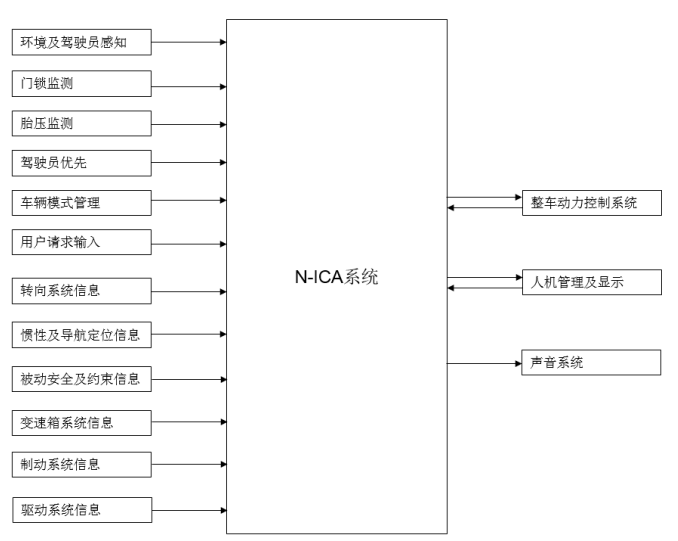
辅助驾驶功能开发-外部需求篇-导航式巡航辅助NCA外部依赖及需求
1.功能外部依赖 为了设计满足用户需求的 ICA/NCA 系统,需要用到的系统输入为:环境及驾驶员感知信息、 门锁监测信息、胎压监测信息、驾驶员权限管理、车辆模式管理信息、用户请求输入、转向系统 信息、惯性及导航定位信息、被动安全及约束信息、变速箱系统信息、制动系…

ROSBAG中提取图片
参考:利用ROS工具从bag文件中提取图片-CSDN博客 5. 用ros工具从bag文件中提取图片
1). 首先需要安装一些图片处理依赖的包: MJPEG, ffmpeg $ sudo apt-get install mjepgtools $ sudo apt-get install ffmpeg
2). 新建文件夹用于储存提取后的图片,并…

L4公司进军辅助驾驶,放话无图也能跑遍中国
作者 |
Amy 编辑 |
德新 高阶智能驾驶走向规模量产,高精地图成为关键的门槛之一。今年,多家车企和智驾公司都喊出「不依赖高精地图,快速大规模落地」的口号。
华为、小鹏、元戎以及毫末等,可能是最快在国内量产
无高精图智…
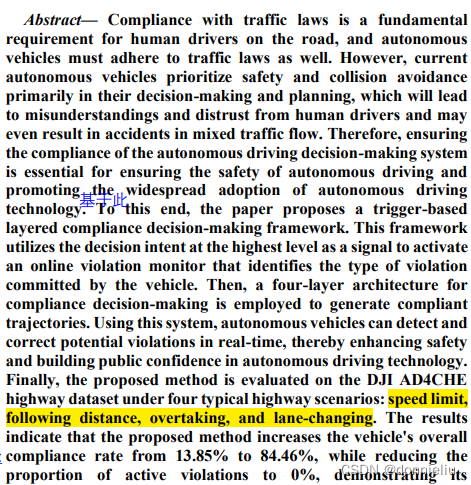
2. Legal Decision-making for Highway Automated Driving
主要内容 本文提出了一个产生合规决策的四层架构。主要适合高速中的四种场景,速度限制,跟车距离,超车,换道。最终提高了自动驾驶合规率。相关研究 当前主要有两种方式来考虑交通法规的决策,一个是基于规则的ÿ…
8.26 校招 内推 面经
绿泡泡: neituijunsir 交流裙,内推/实习/校招汇总表格
1、校招 | 蚂蚁集团 2024 届校园招聘全球启动(内推)
校招 | 蚂蚁集团 2024 届校园招聘全球启动(内推) 2、校招 | 黑芝麻智能校园招聘博士专场正式…
2022年汽车驾驶员(技师)试题及在线模拟考试
题库来源:安全生产模拟考试一点通公众号小程序
2022汽车驾驶员(技师)国家题库系汽车驾驶员(技师)全部考试题库的新全考试题型!2022年汽车驾驶员(技师)试题及在线模拟考试根据汽车驾…
2022中式面点师(初级)操作证考试题及模拟考试无标题】
题库来源:安全生产模拟考试一点通公众号小程序
2022中式面点师(初级)理论题库是中式面点师(初级)考试100题考前必练习题目!2022中式面点师(初级)操作证考试题及模拟考试依据中式面点…

自动驾驶:控制算法概述
自动驾驶:控制算法概述 常见控制算法PID算法LQR算法MPC算法 自动驾驶控制算法横向控制纵向控制 参考文献 常见控制算法
PID算法
PID(Proportional-Integral-Derivative)控制是一种经典的反馈控制算法,通常用于稳定性和响应速度要…

国内首家,极越展示纯视觉城市NOA,正面对决特斯拉FSD
作者 | 德新
编辑 | 王博 10月17日,极越宣布其基于纯视觉的高阶智驾方案,已在上海核心城区跑通城市领航辅助功能,同时官方还首次公布了与百度联合开发的Occupancy占用格栅网络技术。
基于对极越一贯的判断,我们认为,…

果园自主跟随碎枝机器人
开发背景
农业扶贫项目—— 开发一款适用于猕猴桃果园的跟随碎枝机器人。
在猕猴桃的种植培育过程中,一项非常重要的环节便是剪枝,通常有冬剪和夏剪。以往果农剪完枝条后要将散落于地的枝条归拢后统一粉碎还田。这需要专门收集地面上的枝条并将其归拢到…

CCF ChinaSoft 2023 论坛巡礼|自动驾驶仿真测试论坛
2023年CCF中国软件大会(CCF ChinaSoft 2023)由CCF主办,CCF系统软件专委会、形式化方法专委会、软件工程专委会以及复旦大学联合承办,将于2023年12月1-3日在上海国际会议中心举行。 本次大会主题是“智能化软件创新推动数字经济与社…
目标检测YOLO实战应用案例100讲-基于改进YOLOv4算法的自动驾驶场景 目标检测
前言
随着21世纪的到来,我国人民的生活水平不断提高,人们对高品质生活的渴望 不断增强,居民对于汽车的需求也逐年增加,汽车保有量呈上升趋势。据2022年中国 汽车工业协会发布汽车全年产业产销数据,分别完成2702.1万辆和2686.4万辆,同比 增长3.4%和2.1%,全年实现小幅增长…
10.23 校招 实习 内推 面经
绿*泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格
1、校招 | 梅赛德斯-奔驰2024校园招聘正式启动
校招 | 梅赛德斯-奔驰2024校园招聘正式启动 2、校招|赛力斯-科技中心 2024校园招聘
校招|赛力斯-科技中心 2024校园招…
【实战项目开发技术分享】如何实现ROS数据同步
文章目录 前言一、什么是消息过滤器(message_filters)?二、消息过滤器(message_filters)的同步策略2.1 TimeSynchronizer2.2 ApproximateTime2.3 ExactTime三、如何使用消息过滤器(message_filters)?3.1 安装3.2 使用 ApproximateTime实现数据同步3.3 使用消息过滤器(…
CV计算机视觉每日开源代码Paper with code速览-2023.10.23
精华置顶 墙裂推荐!小白如何1个月系统学习CV核心知识:链接 点击CV计算机视觉,关注更多CV干货
论文已打包,点击进入—>下载界面
点击加入—>CV计算机视觉交流群
1.【目标检测】Zone Evaluation: Revealing Spatial Bias i…

景联文科技提供4D-BEV标注工具:提升自动驾驶感知能力的精准数据支持
4D-BEV标注是一种用于自动驾驶领域的数据标注方法。在3D空间的基础上,加入了时间维度,形成了四个维度。这种方法通过精准地跟踪和记录动态对象(如车辆、行人)的运动轨迹、姿势变化以及速度等信息,全面理解和分析动态对…
自动驾驶轨迹预测学习笔记
目录
VectorNet:自动驾驶轨迹预测
CVPR2023 轨迹预测冠军方案 QCNeXt VectorNet:自动驾驶轨迹预测
VectorNet:自动驾驶轨迹预测 - 知乎 CVPR2023 轨迹预测冠军方案 QCNeXt
CVPR2023 轨迹预测冠军方案!QCNeXt:新一代…

实现简单的操作服务器和客户端(下)
一、说明 描述:本教程介绍如何使用 simple_action_client 库创建斐波那契操作客户端。此示例程序创建一个操作客户端并将目标发送到操作服务器。
内容 代码代码解释编译运行操作客户端连接服务器和客户端

【大模型】人工智能大模型在自动驾驶领域的应用
随着ChatGPT的火爆,大模型受到的关注度越来越高,大模型展现出的能力令人惊叹。 第一个问题:怎样的模型可以称之为大模型呢? 一般来说,我们认为参数量过亿的模型都可以称之为“大模型”。而在自动驾驶领域,大…

VINS-Mono-VIO初始化 (六:基于已知重力对重力方向进行调整)
可以通过查表的方式直到重力的大小,假设为9.81,我们取出重力的方向然后大小直接设置为9.81 这样调整的目的是因为,上一节求解的方程中的已知量中也是包含的重力的误差影响在里面的,需要这样对误差调整回来
论文中的图如下 我们就…

DENSE 数据集 - STF 数据集(CVPR 2020)
DENSE 数据集 - STF 数据集 - Seeing Through Fog Without Seeing Fog: Deep Multimodal Sensor Fusion in Unseen Adverse Weather(CVPR 2020)摘要1. 引言2. 相关工作3. 多模式恶劣天气数据集3.1 多模态传感器设置3.2 记录4. 自适应深度融合4.1 自适应多…
TC397 EB MCAL开发从0开始系列 之 [15.1] Fee配置 - 双扇区demo
一、Fee配置1、配置目标2、目标依赖2.1 硬件使用2.2 软件使用2.3 新增模块3、EB配置3.1 配置讲解3.2 模块配置3.2.1 MCU配置3.2.2 PORT配置3.2.3 Fls_17_Dmu配置3.2.4 Fee配置3.2.5 Irq配置3.2.6 ResourceM配置4、ADS代码编写及调试4.1 工程编译4.2 测试结果4.3 测例源码->
SVO半直接法SLAM相关资料整理
ORB-SLAM、VINS等是采用的特征点描述符方法 DSO是特征点直接法 一份还不错的SVO中文注释:https://github.com/delovsam/rpg_svo 论文链接:http://rpg.ifi.uzh.ch/docs/ICRA14_Forster.pdf
代码的main主函数在SVO/src/test_pipeline.cpp中
半闲居士-直接…

Apollo自动驾驶:引领未来的智能出行
自动驾驶技术正日益成为当今科技领域的焦点,它代表着未来出行的一大趋势,而Baidu公司推出的Apollo自动驾驶平台则在这一领域中展现出强大的领导地位。本文将深入探讨Apollo自动驾驶技术的关键特点、挑战以及它对未来智能出行的影响。 Apollo自动驾驶平台…

理解自动驾驶感知技术
理解自动驾驶感知技术 文章目录 什么是自动驾驶感知技术?自动驾驶感知技术的关键组成部分1. 雷达(Radar)2. 摄像头(Camera)3. 激光雷达(Lidar)4. 超声波传感器(Ultrasonic Sensors&a…
Apollo7.0系统概述
目录Apollo概述通信框架代码结构代码目录总览canbus模块示例环境的搭建ubuntu系统的安装Nvidia显卡的安装安装docker安装docker工具包操作命令启动apollo docker容器进入apollo docker容器编码细节编译方法启动Apollo DreamView启动Apollo-LGSVL DreamView清除编译环境查看Log启…
辅助驾驶功能开发-功能对标篇(2)-NGP领航辅助系统-小鹏
1.横向对标参数 厂商小鹏车型P7P5G9上市时间202020212022方案13V5R+1DMS12V5R2L+1DMS11V5R2L+1DMS摄像头前视摄像头1*单目+1*双目1*三目1(双目长短焦距,8M)侧视摄像头444(290万)后视摄像头111环视摄像头444DMS摄像头111雷达毫米波雷达5554D毫米波雷达///超声波雷达121212激光雷…

自动驾驶学习笔记(十四)——感知算法
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往: 《自动驾驶新人之旅》免费课程—> 传送门
《Apollo Beta宣讲和线下沙龙》免费报名—>传送门 文章目录
前言
感知算法
开发过程
测试和评价 前言…

『OPEN3D』1.8.3 多份点云配准
多份点云配准是将多份点云数据在全局空间中对齐的过程。通常,输入是一组数据(例如点云或RGBD图像){Pi}。输出是一组刚性变换{Ti},使得经过变换的点云在全局空间中对齐。 NNNNNathan 本专栏地址: https://blog.csdn.net/qq_41366026/category_12186023.html 此处是…
辅助驾驶功能开发-功能规范篇-XPeng-NGP高速自主导航驾驶功能
1.概述 本文档明确对 NGP 的定义及设计要求,将作为自主开发的设计指导文 件。 2.功能定义
根据应用场景将横向控制功能分为两类,非高速公路和高速公路功能。在非高速公路场景中,主要由LCC/TJA/ALC来解决各类细化场景,在高速场景中,NGP来解决细化场景。(本文中高速公路…
2021年中式面点师(高级)考试题及中式面点师(高级)考试题库
题库来源:安全生产模拟考试一点通公众号小程序
安全生产模拟考试一点通:中式面点师(高级)考试题是安全生产模拟考试一点通生成的,中式面点师(高级)证模拟考试题库是根据中式面点师(…

回归(Regression )
回归(Regression )
模型定义
Regression 就是找到一个函数 functionfunction ,通过输入特征 x,输出一个数值 Scalar。
模型应用
股市预测(Stock market forecast) 输入:过去10年股票的变动、…
代客泊车手势召车功能设计规范
目 录 Contents
目录
1. 介绍 Introduction. 8
1.1 此文档的范围和目的 Scope and Purpose of This Document 8
1.2 参考文档References. 9
1.3 文档的维护 Maintenance of the Document 10
1.4 缩略词Abbreviations. 10
1.5 文档概述Document Overview.. 11
1.6 功能…
ThreeJS-平行光物体投影(十九)
平行光源(太阳光)
关键代码: //平行光投射相机的属性 // directionalLight.shadow.camera.near 0.5; directionalLight.shadow.camera.far 500; directionalLight.shadow.camera.top 3; di…

Autoware中pure pursuit纯跟踪算法的代码分析(三)
目录calcCurvature函数详解calcCurvature函数详解
calcCurvature函数原型如下:
double PurePursuit::calcCurvature(const geometry_msgs::Point& target) const
{double kappa;const geometry_msgs::Point pt calcRelativeCoordinate(target, current_pose_…

项目实训 - 智能车系统 - 第三周记录
项目实训 - 智能车系统 - 第三周记录
日期:3.07 – 3.13
项目进度
本周工作进展:
继续进行话题的移植工作给可视化部分提供了测试用的接口
1、imageProjection中发布的lio_sam/feature/cloud_info话题的移植
上周将featureExtraction中发布的话题移…
ROS-3DSLAM(十五)lvi-sam源代码阅读13 —— visual_loop阅读6 - 回调函数 + process分析
2021SCSDUSC
(十五)lvi-sam源代码阅读13 —— visual_loop阅读6 - 回调函数 process分析
本次将主要分析loop_detection_node文件中的4个回调函数以及一个并行执行的函数
visual_loop
main函数中的订阅话题 以及开启新线程
ros::Subscriber sub_im…

ROS从入门到精通5-5:局部路径规划插件开发案例(以DWA算法为例)
目录0 专栏介绍1 局部规划插件制作框架2 DWA算法源码分析2.1 全局路径裁剪2.2 更新局部代价2.3 运行DWA算法2.3.1 构造动态窗口2.3.2 生成最优轨迹2.4 终点规划3 算法测试0 专栏介绍
本专栏旨在通过对ROS的系统学习,掌握ROS底层基本分布式原理,并具有机…
TC397 EB MCAL开发从0开始系列 之 [15.0] Fee配置说明 -理论详解
一、Fls模块详解1. FEE驱动工作模式:1.1 双扇区&QS1.2 单双扇区1.3 单QS2. Fls配置相关3. 初始化FEE驱动程序4. FEE operation5. Configuration of QS blocks6. Key points to consider6.1 FEE和FLS依赖6.2 GC介绍6.3 写块接近GC阈值6.4 FEE_E_GC_TRIG DEM6.5 Fee_Read和Fe…

用Roboware写一个server和client _Python
1、参考网址:ROS/Tutorials/WritingServiceClient(python) - ROS Wiki
2、首先,写一个srv文件,这个文件用于定义变量数据类型。在roboware定义非常方便
2.1、首先讲工作哦空间导入进来,即文件-打开工作空间文件,选择…

视觉SLAM十四讲笔记-2
视觉SLAM十四讲笔记-2 文章目录视觉SLAM十四讲笔记-2第二讲-初识SLAM2.1 引子2.2 经典视觉SLAM框架2.2.1 视觉里程计2.2.2 后端优化2.2.3 回环检测2.2.4 建图2.3 SLAM问题的数学表述第二讲-初识SLAM
直接截取高翔视觉SLAM第二章开头图片:
2.1 引子
一个机器人要…
视觉SLAM十四讲笔记-1
视觉SLAM十四讲笔记-1 文章目录视觉SLAM十四讲笔记-1第一讲:预备知识1.1 本书讲什么1.2 如何使用本书参考链接:linklink高翔,张涛,等. 视觉 SLAM 十四讲:从理论到实践[M]. 电子工业出版社, 2019.第一讲:预备知识
1.1 本书讲什么
SLAM是Simulaneous Loc…

(五)carla中世界坐标系与相机坐标系、像素坐标系变换
(五)carla中世界坐标系与相机坐标系、像素坐标系变换
由于实验需要将 carlacarlacarla 中世界坐标系下的坐标点画到相机采集的前视图上,故需要进行坐标系之间的转换。
转换中遇到的问题
参考这篇博客中给出的方法: link 发现将世界坐标系转…

(三) Carla中核心概念
(三) Carla中核心概念 CarlaCarlaCarla 和 Carla_Ros_BridgeCarla\_Ros\_BridgeCarla_Ros_Bridge 安装完成后,就开始 CarlaCarlaCarla 的学习了。 后续学习过程将重点参考官网给出的 CARLADocumentationCARLA\; DocumentationCARLADocumentation,链接 link
carla界…

(二) Carla_Ros_Bridge安装教程
(二) Carla_Ros_Bridge安装教程
官网教程参考:link
安装步骤
1.首先去该链接 link 中下载对应版本的 ros_bridgeros\_bridgeros_bridge 源码,这里下载的是 0.9.80.9.80.9.8 版本。 2. 在根路径下打开终端,运行:
mkdir -p ~/carla-ros-br…
VINS-Mono代码解读---启动文件launch、参数配置文件yaml
前言
本文将首先对euroc.launch和euroc_config.yaml文件进行代码解读,对VINS中的启动文件launch和参数配置文件yaml进行详细介绍,主要为了了解VINS的启动和运行需要提供哪些参数,若是想用自己的传感器运行VINS,又需要修改哪些参数…

VINS-MONO概述
VINS-Mono是HKUST的Shen Shaojie团队开源的一套Visual-Inertial融合定位算法,https://github.com/HKUST-Aerial-Robotics/VINS-Mono,是用紧耦合方法实现的,通过单目IMU恢复出尺度,效果很好,接下来对会该算法框架逐步解…
视觉SLAM常见面试题 (下)
常见面试题 1、 视觉SLAM框架及组成 a) SLAM即实时定位建图,按照使用的传感器分为激光SLAM(LOAM、V-LOAM、cartographer、gmapping)与视觉SLAM,其中视觉SLAM又可分为单目SLAM(MonoSLAM、PTAM、DTAM、LSD-SLAM、ORB-S…

VINS 细节系列 - 特征点三角化
一、原理
在得到运动之后,下一步我们需要用相机的运动估计特征点的空间位置。在单目 SLAM 中,仅通过单张
图像无法获得像素的深度信息,我们需要通过三角测量(Triangulation) 的方法来估计地图点的深度。
三角测量:通过在两处观察同一个点的夹角,从而确…

电子电器架构——怎样在请求/响应 ID确定的情况下修改发送FD 的CAN ID?
我是穿拖鞋的汉子,魔都中一个坚持长期主义的工程师!
老规矩,分享一段喜欢的文字,避免成为高知识低文化的人: 能不传话,最好不要传话;能不套话,最好不要套话;能不涉入“背后的批评”,最好不要涉入。让自己像沙滩,多大的浪来了,也是轻抚着沙滩,一波波地退去。而不要…

激光雷达的厮杀18年:西方“诸神黄昏”,东方“新王隐现”
鼻祖、发明家、神童、梦想家、特种兵和中国双星,激光雷达“诸神混战”,行业疯狂洗牌。
风云激荡中,每个人都在亲身见证历史。
2004年,美国发起DARPA挑战赛,无人车上路,汽车上首次出现激光雷达。
2010年之…

【PCAN工程机械应用系列】虹科PCAN在煤矿机械设备上应用
应用背景
/BACKGROUND
为提高煤矿矿井的安全和生产效率,大量信息需要检测、传输和预处理。为解决多信息和复杂环境下传输的问题,将多传感器信息融合技术和CAN总线技术用于煤矿井下环境监测,减少了判断的时间、提高了判断的精度,…
(01)ORB-SLAM2源码无死角解析-(37) EPnP 算法原理详解→理论基础一:控制点选取、透视投影约束
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下: (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/123092196 文末正下方…
ORB_SLAM3_IMU预积分理论推导(残差)
残差 预积分的测量值采用一阶近似修正,免去了积分重新运算,降低计算量状态包含: R i , p i , v i , R j , p j , v j , δ b i
(01)ORB-SLAM2源码无死角解析-(18) SVD奇异值分解→求解Homography,Fundamental矩阵,了解矩阵自由度
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下: (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/123092196 文末正下方中心提供了本人 联系…
现代雷达车载应用——第2章 汽车雷达系统原理 2.2节 汽车雷达架构
经典著作,值得一读,英文原版下载链接【免费】ModernRadarforAutomotiveApplications资源-CSDN文库。
2.2 汽车雷达架构 从顶层来看,基本的汽车雷达由发射器,接收器和天线组成。图2.2给出了一种简化的单通道连续波雷达结构[2]。这…
ADAS辅助驾驶之:BSD盲区监测功能
摘要:
盲点监测系统从技术上主要分为影像和雷达2种,2种技术路线各有优劣。
目录
1、车辆盲区监测系统的定义
2、车辆盲区监测系统原理
3、车辆盲区监测系统硬件安装及标定
4、车辆盲区监测系统发展 1、车辆盲区监测系统的定义 盲区监测系统&#x…
nuScenes数据集详细介绍
nuScenes网上介绍资料较多,但是大部分仅仅是对官网的翻译,缺乏各个文件的内在联系介绍。例如,nuScenes激光雷达的数据格式,点云包含哪几种属性。再比如,sample文件夹和sweeps文件夹下的文件关系,以及是如何…
【三维目标检测】SASSD(二)
SASSD数据和源码配置调试过程请参考上一篇博文:【三维目标检测】SASSD(一)_Coding的叶子的博客-CSDN博客。本文主要详细介绍SASSD网络结构及其运行中间状态。
1 SASSD模型总体过程 SASSD模型的整体结构如下图所示。SASSD与基于Anchor的目标检…
自动驾驶中地图匹配定位技术总结
引言
汽车定位是让自动驾驶汽车知道自身确切位置的技术,在自动驾驶系统中担负着相当重要的职责。汽车定位涉及多种传感器类型和相关技术,主要可分为卫星定位、惯性导航定位、地图匹配定位以及多传感器融合定位几大类。其中地图匹配定位技术利用道路物理…
梳理自动驾驶中的各类坐标系
目录 自动驾驶中的坐标系定义
关于坐标系的定义
几大常用坐标系
世界坐标系
自车坐标系
传感器坐标系
激光雷达坐标系
相机坐标系
如何理解坐标转换
机器人基础中的坐标转换概念
左乘右乘的概念
对左乘右乘的理解
再谈自动驾驶中的坐标转换
本节参考文献 自动驾驶…
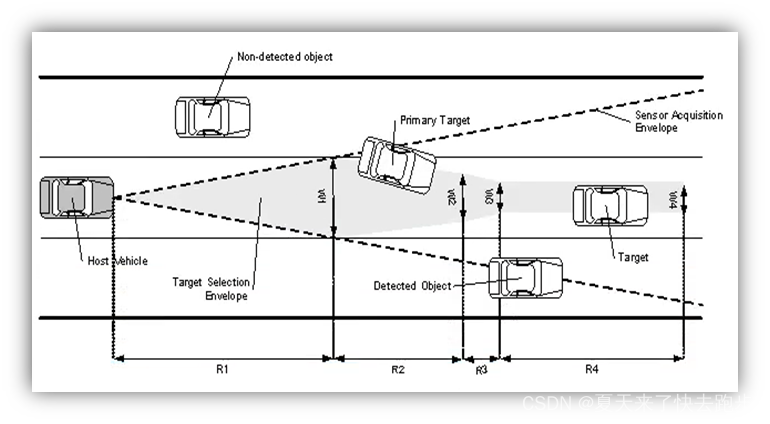
辅助驾驶功能开发-功能算法篇(1)-ACC-多目标选择
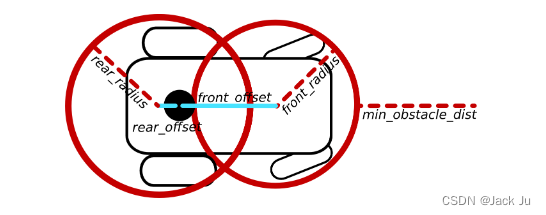
1、总体架构 2、漏斗概念(Funnel) 路径漏斗是围绕着自车预测轨迹的一片区域。换言之,漏斗的中心应该根据预测的轨迹方向相应的弯曲。
2.1、普通&略宽漏斗(Normal Funnel & Wider Funnel)
普通漏斗用于选择路径中最近的目标车辆A和次近的车辆B。
更宽的漏斗用于选择…
2021年焊工(技师)证考试及焊工(技师)作业考试题库
题库来源:安全生产模拟考试一点通公众号小程序
安全生产模拟考试一点通:焊工(技师)证考试根据新焊工(技师)考试大纲要求,安全生产模拟考试一点通将焊工(技师)模拟考试试…
激光雷达(LiDAR)技术
激光雷达 LiDAR
不久前引发热议的iPhone 12 Pro机型,配备了全新的LiDAR扫描仪,只需点击自带的Measure应用程序,便能立即测量一个人的身高。
在人工智能和自动驾驶领域,神奇的LiDAR又有着怎样的用处?随着汽车巨头们在…

筹备三年,自动驾驶L3标准将至,智驾产业链的关键一跃
作者|张祥威
编辑|德新 多位知情人士告诉HiEV,智能网联汽车准入试点通知,乐观预计将在一个月内发布。试点的推动,意味着国家层面的自动驾驶L3标准随之到来。
「L3标准内容大部分与主机厂相关,由工信部牵头,找了几家…
2021年施工员-土建方向-通用基础(施工员)考试试卷及施工员-土建方向-通用基础(施工员)模拟考试题
题库来源:安全生产模拟考试一点通公众号小程序
安全生产模拟考试一点通:施工员-土建方向-通用基础(施工员)考试试卷考前必练!安全生产模拟考试一点通每个月更新施工员-土建方向-通用基础(施工员)模拟考试题题目及答案!多做几遍&a…
2021年材料员-通用基础(材料员)考试报名及材料员-通用基础(材料员)试题及解析
题库来源:安全生产模拟考试一点通公众号小程序
安全生产模拟考试一点通:材料员-通用基础(材料员)考试报名是安全生产模拟考试一点通总题库中生成的一套材料员-通用基础(材料员)试题及解析,安全生产模拟考试一点通上材料员-通用基础(材料员)作…
卡尔曼家族从零解剖-(00)目录最新无死角讲解
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的 卡尔曼家族从零解剖 链接 :卡尔曼家族从零解剖-(00)目录最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/133846882 文末正下方中心提供了本人 联系…
2021年金属非金属矿山(地下矿山)主要负责人考试及金属非金属矿山(地下矿山)主要负责人试题及解析
题库来源:安全生产模拟考试一点通公众号小程序
安全生产模拟考试一点通:金属非金属矿山(地下矿山)主要负责人考试根据新金属非金属矿山(地下矿山)主要负责人考试大纲要求,安全生产模拟考试一点…
【无标题】2021年西式面点师(高级)考试题库及西式面点师(高级)考试报名
题库来源:安全生产模拟考试一点通公众号小程序
安全生产模拟考试一点通:西式面点师(高级)考试题库参考答案及西式面点师(高级)考试试题解析是安全生产模拟考试一点通题库老师及西式面点师(高级…
2021年机修钳工(中级)及机修钳工(中级)复审模拟考试
题库来源:安全生产模拟考试一点通公众号小程序
安全生产模拟考试一点通:机修钳工(中级)是安全生产模拟考试一点通总题库中生成的一套机修钳工(中级)复审模拟考试,安全生产模拟考试一点通上机修…
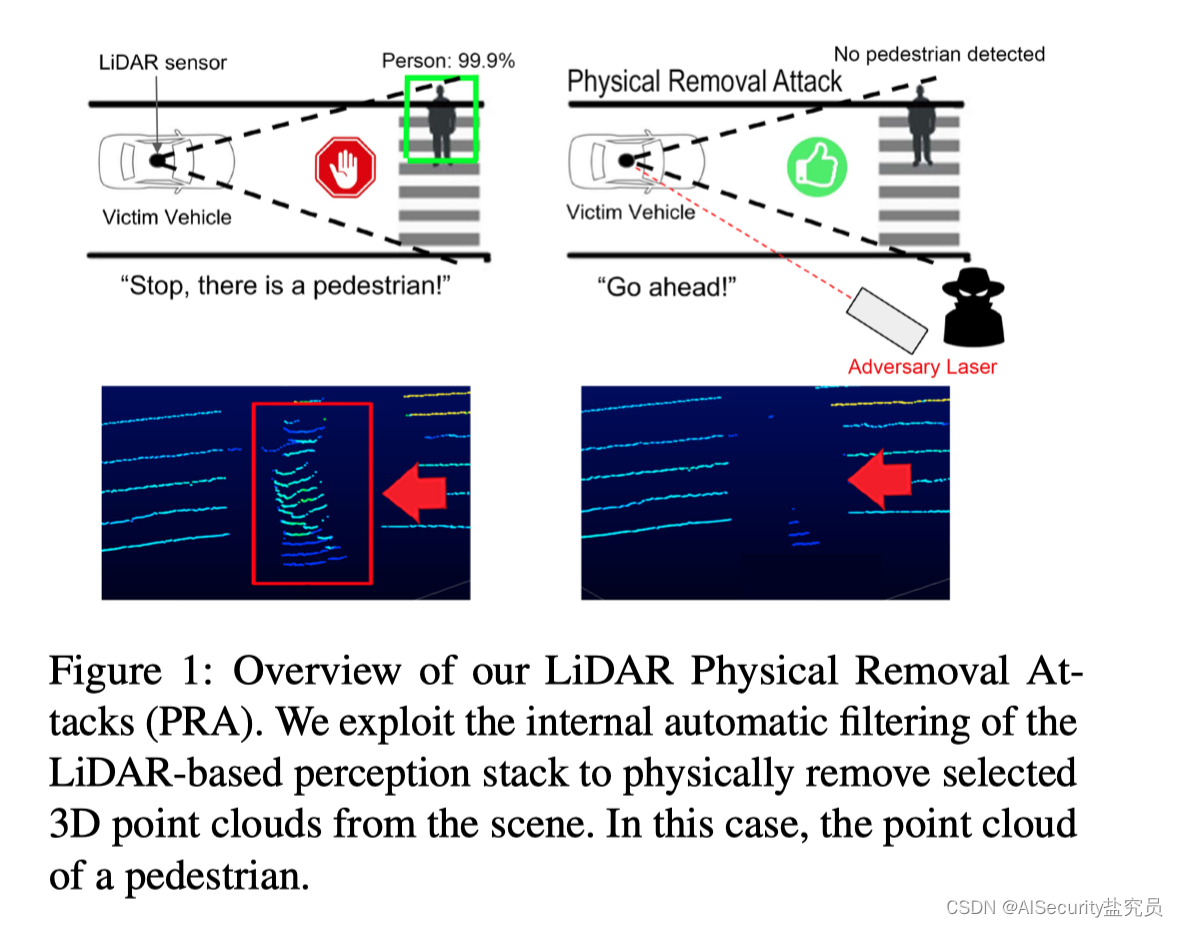
【论文阅读】你看不见我:对基于激光雷达的自动驾驶汽车驾驶框架的物理移除攻击
文章目录 AbstractIntroduction Abstract
自动驾驶汽车(AVs)越来越多地使用基于激光雷达的物体检测系统来感知道路上的其他车辆和行人。目前,针对基于激光雷达的自动驾驶架构的攻击主要集中在降低自动驾驶物体检测模型的置信度,以诱导障碍物误检测&…

自动驾驶巨头们的数据“竞速赛”
2021年初,特斯拉披露正在位于纽约的Gigafactory招聘一组数据标签员,以提供图像标注支持,帮助训练Autopilot/FSD神经网络。因为对于自动驾驶演进来说,算法方面的差距会逐渐缩小,数据将是真正影响技术能力和用户体验的重…
ROS学习寄录之环境搭建
1 创建ROS工作空间
1.1 创建工作空间
(1)创建工作空间
mkdir catkin_ws
(2)进入catkin_ws文件夹,然后创建一个src文件夹
cd catkin_ws
mkdir src
(3)进入src文件夹,生成CMakeL…
2021年汽车修理工(初级)考试报名及汽车修理工(初级)考试总结
题库来源:安全生产模拟考试一点通公众号小程序
安全生产模拟考试一点通:安全生产模拟考试一点通:安全生产模拟考试一点通:汽车修理工(初级)考试报名考前必练!安全生产模拟考试一点通每个月更新…
提升cartographer局部全局SLAM实时性,降低cartographer在低性能板上的堵塞
前言
最近鼓捣cartographer比较多,然后现在需要在低性能板子上用cartographer进行长时间的建图,之前在地下停车场开了一下午的车录了近五个小时的纯激光bag(如果需要的话,跟我留言),然后我拿上来喂给rockp…
![[SLAM] opencv-python的2D-2D视觉里程计(参考高老师的视觉slam十四讲)](https://img-blog.csdnimg.cn/d868fc54f4bd46adbcdc79ec4ecc7ce2.png?x-oss-process=image/watermark,type_ZHJvaWRzYW5zZmFsbGJhY2s,shadow_50,text_Q1NETiBAQXN0cm9waGlseQ==,size_16,color_FFFFFF,t_70,g_se,x_16)
[SLAM] opencv-python的2D-2D视觉里程计(参考高老师的视觉slam十四讲)
这里写目录标题项目场景直接上代码实验最后的话项目场景
最近在鼓捣slam相关的技术,奈何身边我知道的只有我一个人在学习slam技术,没有人一块交流,感觉学习很乏力,不知道从部分开始做起。 看了高博的视觉slam十四讲之后决心从视觉…

ROS-3DSLAM(十二)lvi-sam源代码阅读10 —— visual_loop阅读3 + ORB学习
2021SCSDUSC
(十二)lvi-sam源代码阅读10 —— visual_loop阅读3 ORB学习
visual_loop
DUtils文件夹
DException
定义异常信息
Timestamp
//成员变量/// Secondsunsigned long m_secs; // seconds/// Microsecondsunsigned long m_usecs; // micr…

ROS-3DSLAM(十一)lvi-sam源代码阅读9
2021SCSDUSC
(十一)lvi-sam源代码阅读9
前置知识
vins-mono
lvi-sam的视觉部分是基于vins-mono算法的。所以在阅读开始之前学习以下这个算法是很有必要的。
vins-mono github地址:https://github.com/HKUST-Aerial-Robotics/VINS-Mono
…
ROS+QT ROS_MASTER_URI is not defined in the environment
ROS_MASTER_URI is not defined in the environment在用QT调试ROS的时候,运行出现以下错误: ROS_MASTER_URI is not defined in the environment. Either type the following or (preferrably) add this to your ~/.bashrc file in order set up your lo…

(02)Cartographer源码无死角解析-(16) SensorBridge→Rigid3(刚体变换)
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…

【虹科】LiDAR测量物料体积为行业带来革命性变化
在商业化竞争日益激烈的环境下,任何提高运营效率的机会对公司来说都是宝贵的。包括对原材料的精准测量和追踪,因为从规划到制造和交付的整个过程都依赖于它。此过程的一个关键组成部分是物料体积测量,这是跟踪库存或测量材料库存必不可少的一…
(02)Cartographer源码无死角解析-(10) 配置文件加载1→主体框架分析LoadOptions()
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 …
2023-3-2-22:01随笔
好久没怎么更新技术分享博客了。去年从2022年1月3日到2023年1月份一直专注于ADAS的行车横向功能的研发与实车调试,2022年写了几篇项目经验的文章,像LQR算法(虽然和同事(志同道合,技术追求的民哥)写出的工程…
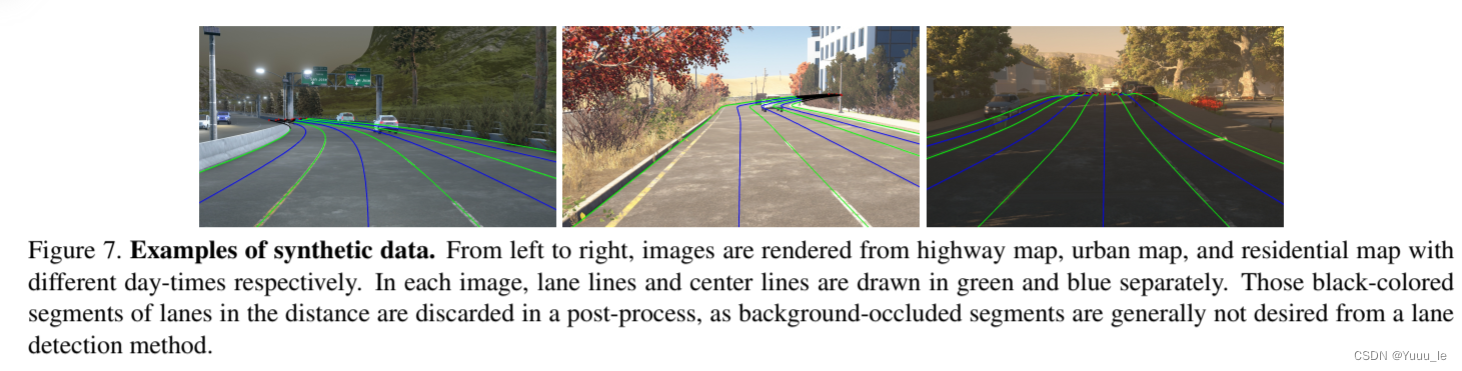
Gen-LaneNet论文精读总结
Gen-LaneNet: A Generalized and Scalable Approach for 3D Lane Detection 文章目录Gen-LaneNet: A Generalized and Scalable Approach for 3D Lane Detection1. 本文解决问题2. 实现方法(Method)2.1 基于几何关系的anchor表示2.2 网络和训练3. Synthetic dataset & 实验…

(01)ORB-SLAM2源码无死角解析-(63) BA优化(g2o)→局部建图线程:Optimizer::LocalBundleAdjustment→位姿与地图点优化
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(57) 闭环线程→计算Sim3:理论推导(2)求解R,使用四元数
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
史上最简SLAM零基础解读(1) - 旋转平移矩阵→欧式变换推导
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始 有兴趣的朋友可以加微信 17575010159 相互讨论技术 - 文末公众号也可关注 一、前言(线性变换)
该篇博客主要讲解一个 slam 中最基础的几个东西,那就是旋转矩阵,缩放矩阵以及偏移矩阵。本人会做…

Ubuntu16.04下安装ROS Kinetic环境
Ubuntu16.04下安装ROS Kinetic环境Ubuntu16.04安装ROS Kinetic 环境安装安装准备环境安装初始化 rosdep环境配置最后结语Ubuntu16.04安装
首先去Ubuntu官网https://ubuntu.com/download/alternative-downloads 选择对应的Ubuntu16.04.iso文件下载,之后按照网上教程…
SLAM面试笔记(2) - ORB-SLAM2
目录
1 四叉树实现特征点均匀化分布
2 Bow词袋模型
2.1 什么是词袋?
2.2 词袋在ORB-SLAM2中的作用
2.3 离线训练字典树流程
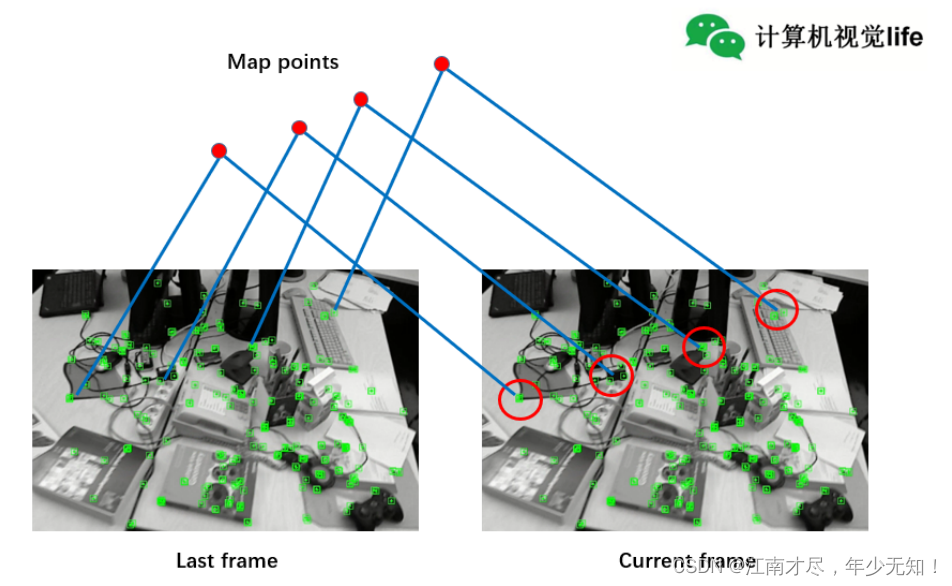
3 ORB-SLAM的跟踪方法
3.1 恒速模型跟踪
3.2 重定位跟踪
3.3 参考关键帧跟踪 持续更新中... 1 四叉树实现特征点均匀化分布
参考…
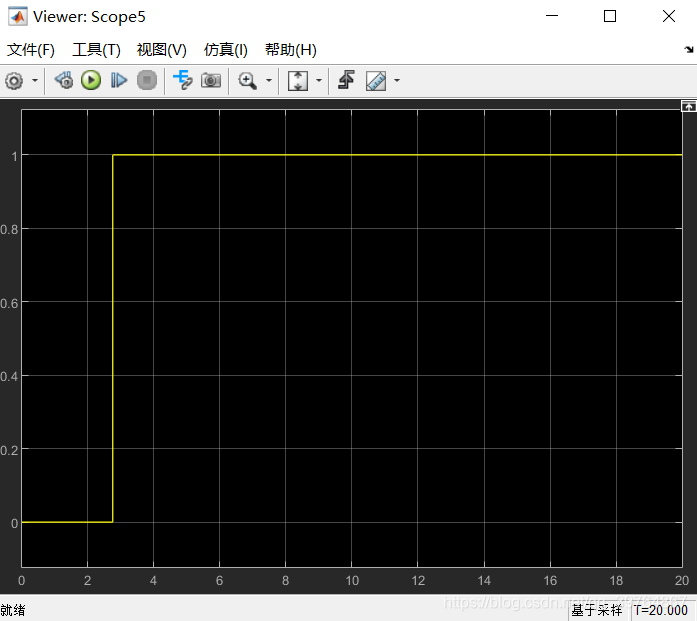
学习记录《Simulink 快速入门 —— 官方Help文档》
Simulink 快速入门 —— 官方Help文档1. Simulink 模块图2 创建简单模型2.1 打开新模型2.2 打开 Simulink库浏览器2.2.1将模块添加到模型2.2.2 连接模块2.2.3 添加信号查看器2.2.4 运行仿真2.2.5 细化模型1. 更改模块参数2. 添加新模块和连接3. 为信号添加注释4. 比较多个信号3…

Carla自动驾驶仿真三:Traffic Manager交通管理器详解
CARLA Traffic Manager 一、什么是Traffic Manager1、Traffic Manager简介2、Traffic Manager框架3、Traffic Manager模块 二、Traffic Manager控制方法1、TM控制交通参与者的自动驾驶的规则2、TM控制交通参与者行为的API摘要3、TM控制交通参与者行为的API 三、Traffic Manager…
法规标准-EU 2021-1958标准解读
EU 2021-1958是做什么的?
EU 2021-1958全称为关于机动车智能速度辅助系统(ISAS)认证的具体试验程序及技术要求,其中主要描述了认证ISAS系统所需的功能要求及测试要求
一般要求
1.ISA系统的设计应避免或尽量减少实际驾驶情况下的…

阿里下放自动驾驶,汽车业务是个坑,或是时候探讨下一个乐视了
阿里发布公告指达摩院自动驾驶团队将全部并入菜鸟集团,虽然并没有说关闭自动驾驶业务,但是自动驾驶业务已不再是阿里看重的业务,导致如此结果在于当前汽车行业发生的重大变化。 一、传统汽车开始发力 今年4月份的新能源汽车企业销量排名数据显…

单视觉L2市场「鲶鱼」来了,掀起数据反哺高阶新打法
作者 | 张祥威编辑 | 德新 智驾方案的降本行动仍在推进。 早年,单视觉L2市场的玩家以Mobileye、博世为主,后来国内智驾公司加入,共同推动 1V、1R1V、nR1V等不同的方案兴起,L2近乎成为车辆的必备功能。 当下,在行业降低…
Carla自动驾驶仿真五:opencv绘制运动车辆的boudingbox(代码详解)
文章目录 一、安装opencv二、opencv绘制车辆的boudingbox1、构造相机投影矩阵函数2、定义将Carla世界坐标转换成相机坐标的函数3、设置Carla并生成主车和相机4、使用队列接收相机的数据5、计算相机投影矩阵6、定义顶点创建边的列表7、通过opencv显示相机的画面8、通过opencv绘制…

自动驾驶嵌入式开发工程师:车载SOC开发修炼秘籍
声明:本文档是博主在开发学习过程中写的笔记,本意是便于以后开发复盘,参考《 ug1144-petalinux-tools-reference-guide》、《ug1085》、黑金Zynq UltraScale MPSoC 5EV开发板资料、英伟达官方资料。大佬勿喷 大佬勿喷 大佬勿喷!&a…

三维点云处理05-FPS代码实现
三维点云处理05-FPS代码实现
基础知识点
最远点采样原理解释: 1.从原始点云中选取一个初始点作为最远点 2.设定我们希望获得的最远点的数量npoints 3.进行npoints次循 4.每次循环中计算原点点云中每个点到距离它最近的最远点的距离 5.然后从中选出距离最大的点作为…

【ROS2仿真】仿真工程之(1)--urdf文件
一、说明 对于仿真来说,urdf文件是最基本的数据资料,虽然有时候该文件不需要自己写,但是,如果长期处于试验状态,你不知道如何写urdf是不行的,因此本文这里首先介绍urdf类文件,以及宏如何写&…
2022育婴员(五级)判断题及答案
题库来源:安全生产模拟考试一点通公众号小程序
2022年育婴员(五级)国家题库系育婴员(五级)复审题库考前押题!2022育婴员(五级)判断题及答案依据育婴员(五级)…

基于光流跟踪和功能匹配(称为LK-ORB-SLAM2)融合的立体视觉气味测量算法
目录 1、如何解决光流跟踪过程中丢失特征点的问题
2、ORB-SLAM2的工作流程:检测功能点、立体声匹配、功能匹配和运动估计
3、LK-ORB-SLAM2的工作流程
4、功能提取算法
5、立体声匹配 6、光流跟踪 1、如何解决光流跟踪过程中丢失特征点的问题
建议采用自适应匹配…

第1章 OpenCV的GUI特性
目录 1.1 从图片开始
1.1.1 图片读取
1.1.2 图片显示 1.1.3 保存图片 1.1.4 Matplotlib显示图片 1.1.5 分别显示RGB的亮度 1.1.6 截取图片
1.2 从视频开始
1.2.1 用摄像头获取视频并处理帧
1.2.2 播放视频文件
1.2.3 保存视频
1.3 OpenCV的画图函数
1.4 将鼠标作为画笔…
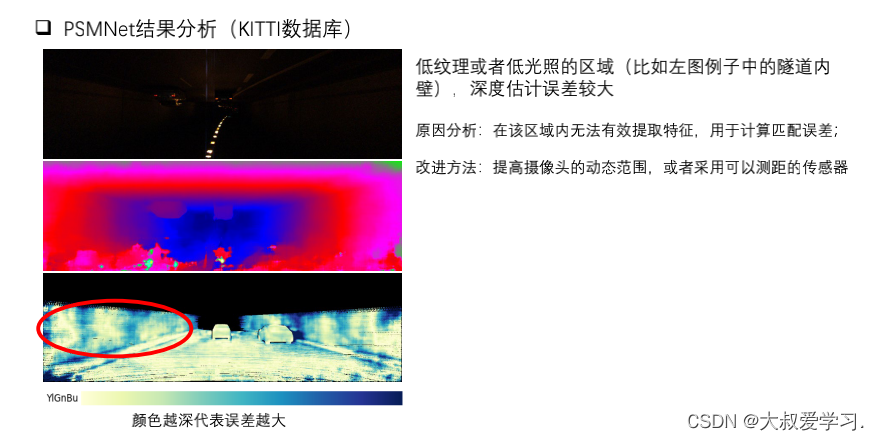
自动驾驶 2D 单目\双目\多目视觉方法 一(Pseudo-LiDAR,Mono3D,FCOS3D,PSMNet)
文章目录概述单目3D感知3D目标检测单目深度估计双目3D感知双目3D目标检测双目深度估计Pseudo-LiDAR1. 核心思路总结2. 要点分析Mono3DFCOS3DPSMNet概述
自动驾驶中必不可少的3D场景感知。因为深度信息、目标三维尺寸等在2D感知中是无法获得的,而这些信息才是自动驾…

自动驾驶 知识点 Review 2D 感知算法 二(单阶段法 Yolo系列,SSD系列,RetinaNet)
文章目录Yolo系列概述Yolo v1Yolo v2SSD系列RetinaNetYolo系列
概述
Yolo系列复习来自知乎:科技猛兽系列文章
本文目的是用尽量浅显易懂的语言让零基础小白能够理解什么是YOLO系列模型,以及他们的设计思想和改进思路分别是什么。我不会把YOLO的论…

Apollo学习笔记
Apollo学习笔记
Apollo课程
智能驾驶入门课程
无人驾驶概览
1、软件层分为三层: 实时操作系统(RTOS):确保在给定时间内完成特定任务,实时时确保系统稳定性、驾驶安全性的重要要求。通过在Ubuntu Linux操作系统加入Apollo内核,…
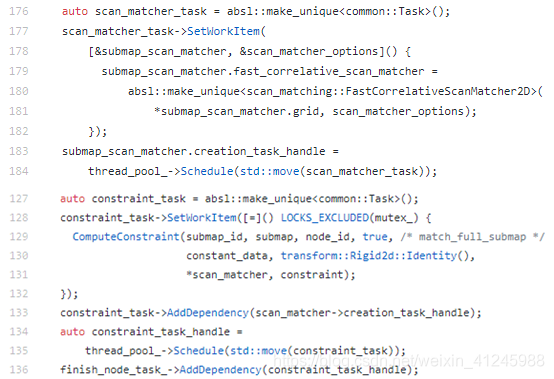
cartographer总结(三)-线程池(thread_pool)
Cartographer总结(三)-线程池(thread_pool)线程池:程序运行时,创建一定数量的线程,此时所有线程都处于空闲状态。当有新的任务进来时,若线程池中有空闲线程,则从线程池中取出一个空闲…

Cartographer总结(二)-代码框架及算法流程
Cartographer总结(二)-代码框架及算法流程本文从/scan传递的信息流帮助大家找到算法的入口,在找算法入口的同时可以帮助理解代码框架。在ROS环境中跑cartographer一般包含cartographer和cartographer_ros两个库,cartographer是算法库…
Apollo源码分析学习笔记
Apollo 源码剖析学习笔记
Apollo 项目介绍
Cyber RT 代码分析
cyber base
xzxiaqiu:~/study/apollo/cyber/base$ tree
.
├── atomic_hash_map.h
├── atomic_hash_map_test.cc
├── atomic_rw_lock.h
├── atomic_rw_lock_test.cc
├── bounded_queue.h
├── …

【自动驾驶入门:从建模到跟随】1 环境搭建和建模准备
【自动驾驶入门:从建模到跟随】1 环境搭建和建模准备1 配置环境2 Gazebo2.1 Gazebo2.2 使用roslaunch打开world模型3 在仿真世界中添加一个立方体3.1 学习 urdf3.2 学习 xacro准备工作:具备ROS基础知识(古月:ROS入门21讲ÿ…
Failed to load joint1_position_controller 错误
启动gazebo一些模型爆出Failed to load joint1_position_controller 错误,可以尝试安装control以及controllers试试
sudo apt-get update
sudo apt-get install ros-noetic-ros-control
sudo apt-get install ros-noetic-ros-controllers
百度阳泉云计算中心二期开工,背后折射出什么?
一个大消息:百度阳泉智能云计算中心(二期)项目已经完成签约并正式开工建设。
这是短短一个月内,继保定两个云计算中心奠基之后,百度在基础设施领域的又一个大手笔。持续加大数据中心基础设施的投入与建设,…

德国汽车行业杂志HANSERautomotive就浪潮信息算法团队在自动驾驶领域所取得的核心突破,进行专题署名报道
近日,德国专业汽车行业杂志HANSERautomotive就浪潮信息算法团队在自动驾驶领域所取得的核心突破,进行专题署名文章报道“Wahrnehmungssysteme und 3D-Objekterkennung Alles im Blick ”(《感知系统和三维物体识别,一切尽收眼底》)。针对AI感…

【ROS】创建工作空间
这里记录下ROS开发,工作空间创建和功能包创建
1 工作空间创建 ROS工作空间顾名思义,就是ROS开发过程中的工作目录 即在终端使用 printenv | grep ROS 命令,里面的 ROS_PACKAGE_PATH 1.1 创建新的工作目录
mkdir -p /你的路径/ros_ws/src //…

自动驾驶开源数据集(附下载链接)
自动驾驶是带动新兴产业的一个突破点,也是中国结合新能源汽车,实现汽车产业弯道超车的不二手段,是打破国外燃油车技术壁垒的关键一步!它不会停止,只是在蓄势待发!
数据集介绍:点击
自动驾驶场…
辅助驾驶功能开发-功能算法篇(3)-ACC-弯道速度辅助
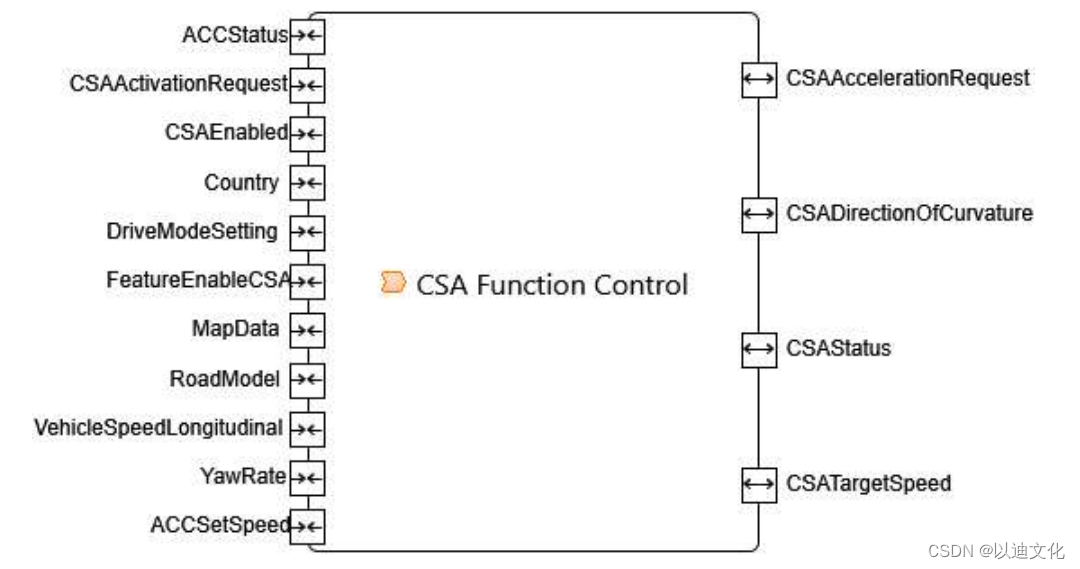
1、功能架构:ACC弯道速度辅助(CSA) 2、CSA功能控制 2.1 要求
2.1.1 CSA ASM:弯道速度辅助
1. 模式管理器:驾驶员应能够激活/关闭功能
应存在处理 CSA 功能的模式管理器。模式管理器由驾驶员输入和系统状态控制。
模式管理器有两个由 CSAStatus 定义的状态。状态转换定义…
从零搭建一台基于ROS的自动驾驶车-----3.激光Slam建图
系列文章目录
北科天绘 16线3维激光雷达开发教程 基于Rplidar二维雷达使用Hector_SLAM算法在ROS中建图 Nvidia Jetson Nano学习笔记–串口通信 Nvidia Jetson Nano学习笔记–使用C语言实现GPIO 输入输出 Autolabor ROS机器人教程 从零搭建一台基于ROS的自动驾驶车-----1.整体介…


视觉SLAM十四讲 2-概述部分
蓝色 紫色 红色
SLAM:同时定位与地图构建
”搭载特定传感器的主体,在没有环境先验信息的情况下,于运动过程中建立环境的模型,同时估计自己的运动“
若传感器主要为相机,即为视觉SLAM。
两类传感器
安装在环境中的…
单目相机-双目相机-激光雷达-IMU联合标定集合
相机内参标定方法
ROS Camera Calibration Tools SLAM之相机标定
外参标定:lidar_camera_calibration
lidar_camera_calibration lidar_camera_calibration项目——激光雷达和相机联合标定 相机雷达联合标定 无人驾驶-激光雷达与相机联合校准(Lidar C…
Autoware.AI 1.14.0版本源码安装(亲测有效)
Autoware.AI 1.14.0版本源码安装(亲测有效)
1.前期准备:
Ubuntu18.04系统 安装
ROS Melodic 安装
显卡驱动 安装
cuda10.0 安装
cuDNN7.5 安装2.安装系统依赖:
sudo apt-get update
sudo apt-get install -y python-catkin-pkg python-ros…
几款开源的自动驾驶仿真平台项目
几款开源的自动驾驶仿真平台项目包括Carla、AirSim、Udacity self-driving car simulator、Apollo和Autoware,项目在Github上都有详细的代码和文档。
需要注意的是,从技术上讲,这些平台主要分为两类:
第一类是基于合成的数据,对环境、感知及车辆进行模拟,这里的感知大多…

Autowares使用(3)——模拟定位与真实定位
Autowares使用(3)——模拟定位与真实定位
1.模拟定位 (1)打开Autoware,在[Simulation]菜单栏中播放之前录制的Bag⽂件,然后点击[Pause] 暂停播放。 (2)在[Setup]菜单下点击[TF]按钮,并确定Loc…

GBT 39323-2020 乘用车车道保持辅助(LKA)系统性能要求及试验方法
下载地址:
http://www.gb688.cn/bzgk/gb/newGbInfo?hcnoA3076DA843D04C4C5068090066D803A3
自动驾驶货车编队行驶-车辆通讯应用层数据交互要求
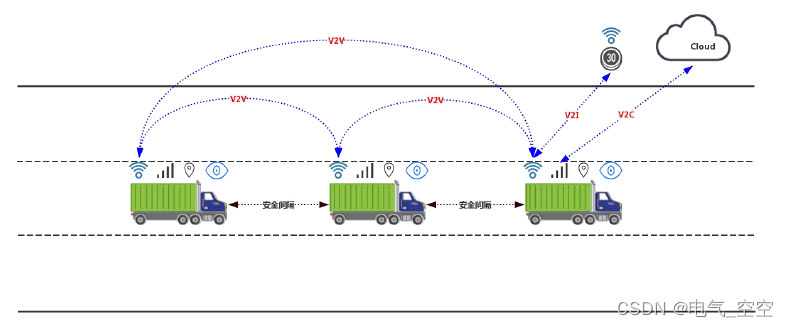
1 范围 本文件规定了合作式自动驾驶货车编队行驶时车辆通信应用层数据交互的通信系统架构、通用要求、 数据交互要求、消息层数据集定义等。本文件仅涉及编队成员内部进行编队控制及成员管理相关的车-车通 信交互,不涉及编队与其他实体(云平台、路侧单元…

论文翻译—3D NDT算法论文(节选6.1-6.2)
文章目录第6章 正态分布变换6.1 用于表面表达的NDT6.2 NDT 扫描配准6.2.1 2D NDT6.2.2 3D NDT参考文献第6章 正态分布变换
本章详细描述了正态分布变换以及它是如何被应用到扫描配准中的。
6.1 用于表面表达的NDT
在第3章讨论的距离传感器都是输出的点云:来自表面…

PCL点云库调库学习系列——随机采样一致性(附完整代码)
随机采样一致性
实现功能 从输入点云中,找到符合某种模型的点云集 具体为:随机产生一系列点云,创建两个随机采样一致性模型为球和平面,根据参数的不同选择不同的模型,执行参数估计,可以得到模型中的局内点…

robware Studio的使用总结
1、打开 2、新建工作空间,catkin_ws_2,并点击save 3、设置本地release,有关说明看下面截图 4、点击菜单栏中的ROS中build构建 5、测试是否正常,点击菜单栏中的ROS中的Run roscore:ctrl c 取消运行 6、添加ROS功能包,右键src,也可以建一个不加…

PCL点云库调库学习系列——关键点NARF(附完整代码)
PCL–关键点
关键点也称为兴趣点,它是 2D 图像、3D 点云或曲面模型上,可以通过定义检测标准来获取的具有稳定性、区别性的点集。从技术上来说,关键点的数量相比于原始点云或图像的 数据量小很多,它与局部特征描述子结合在一起&am…
PCL点云库调库学习系列——点云滤波(附完整代码)
1 点云滤波
PCL中总结了集中需要进行点云滤波处理的情况,分别如下:
点云数据密度不规则需要平滑。因为遮挡等问题造成离群点需要去除。大量数据需要进行下采样。噪声数据需要去除。
对应的方法如下:
按具体给定的规则限制过滤去除点通过常…

Qt下创建ros环境的工作空间
参考链接基于ROS的QT界面开发史上最强教程 cd qt_ws/src catkin_init_workspace cd … catkin_make cd src catkin_create_qt_pkg testgui roscpp rospy std_msgs cd … catkin_make
打开qt -->新建–>other project–>ROS Workspace name----rosqt 随意 build sys…

ros机器人操作系统
Linux中用 pwd 命令来查看”当前工作目录“的完整路径。 简单得说,每当你在终端进行操作时,你都会有一个当前工作目录。
cd cd…(上一级)
mkdir创建文件夹
touch创建文件(类似于txt) mkdir新建文件夹
mv(剪切功能&…
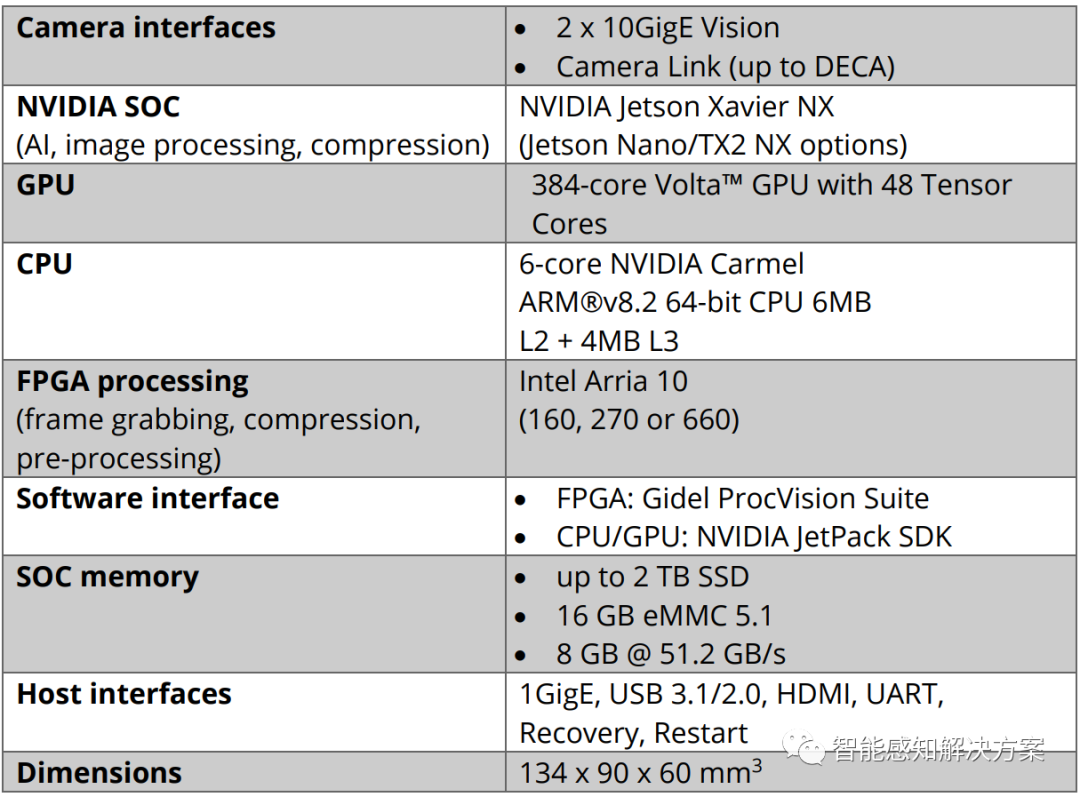
【虹科】速度与激情:用于高速和高分辨图像处理的紧凑型计算机FantoVision 20
虹科与高性能FPGA系统开发领域的技术领跑者Gidel合作,最新推出了一款为高通量图像采集和为图像处理量身定制的小型可靠的嵌入式计算机。FantoVision 20允许以高达20 Gb/s的实时速度对视频流进行图像处理、压缩和录制,所有这些都以超紧凑的形式打包。 高速…
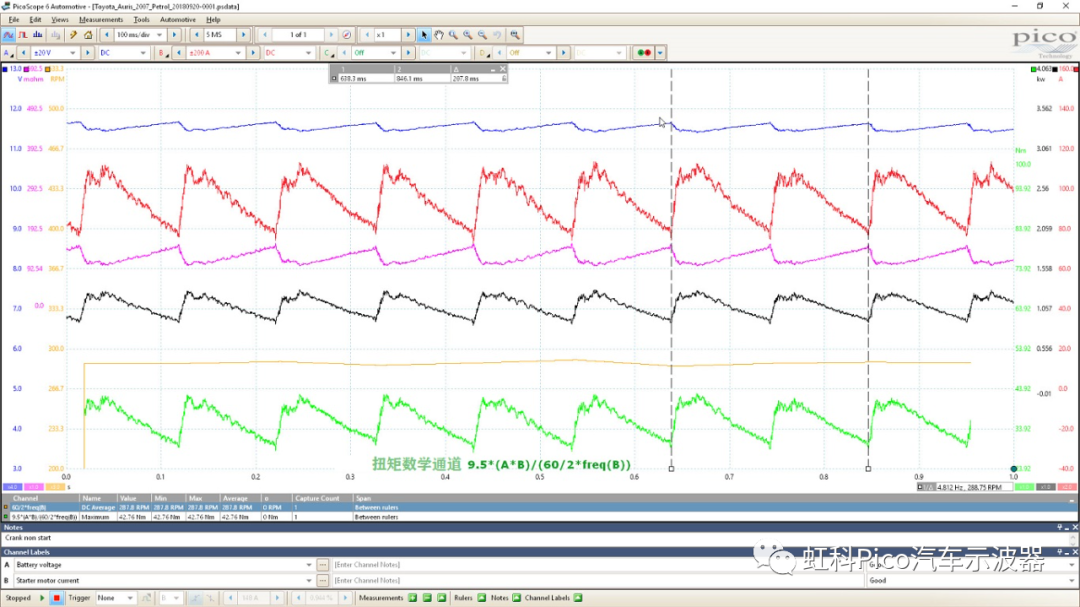
【虹科Pico汽车示波器】数学通道的应用(一)-基本介绍
我想写一篇关于数学通道的新文章,对捕获到的原始数据应用数学通道功能可以揭示很多信息。数学通道真正的美妙之处在于,它可应用于已保存的文件(可能已经保存了很多年),以显示出关于故障的新信息。 图 1
数学通道应用的注意事项 1.确保屏幕上有足够多的样…

虹科自动驾驶 | 在点云中定义分区的应用场景
我们经常说激光雷达的应用领域非常广泛。那么实际上这些应用是什么样子的呢?基于一个算法,我们提出了五种不同的应用。
激光雷达数据以点云的形式表示,每个点包含大量信息,构成了精确的3D环境图像。然后,使用算法对这…

2021虹科开年福利 | 汽车专题直播月震撼开启!
2021虹科开年福利来袭! 春来冬往,充满挑战的2020年走入尾声,我们迎来崭新的2021,而不知不觉中虹科云课堂也已陪伴我们走过了近一年的时光。
2021年1月4日(周一)起,虹科云课堂再次起航ÿ…

自动驾驶 | 传感器融合–自动驾驶的关键技术
传感器融合 为了使车辆能够自动驾驶,必须借助传感器来感知周围环境:摄像头、雷达、超声波和LiDAR传感器等。 传感器如何实现自动驾驶 大众甲壳虫看上去很美,但它并不能识别周围的环境。对于汽车实现自动驾驶来说,感知环境就像人类…
自动驾驶 | 让黑盒子变得清晰可见
“黑盒子”发展史 随着2012年AlexNet在ImageNet图像识别比赛一举拿下冠军,比赛成绩完全碾压亚军,使得深度学习、卷积神经网络变得火热起来。目前的深度学习发展方兴未艾,回想起深度学习的发展史,还真可以用波澜起伏来形容。就如上…

自动驾驶 | 自动驾驶冗余设计的必要性
1 什么是冗余设计
冗余最早是飞机常用的技术术语,指的是飞机的电子控制系统均进行了安全备份,防止一套系统突然坏掉,影响飞机的正常运行。这也是为什么说飞机是目前最安全的交通工具的原因之一。
同理,高级别自动驾驶的实现也是…
![[原创] NDT (ndt_omp) 算法及源码解析(一)](https://img-blog.csdnimg.cn/791bfd7a5cec4207a4ae056e8fe4b599.png)
[原创] NDT (ndt_omp) 算法及源码解析(一)
[原创] NDT (ndt_omp) 算法及源码解析(一)
最近笔者的实习面试遇到全线溃败,深深感到自身的基础理论水平薄弱。知耻而后勇,面试中反映出的问题应该及时补救。因此,笔者最近阅读了经典的NDT算法文章,以巩固…
FAST-LIO2 (ikd-tree) 和 faster-lio (ivox) 代码详解
FAST-LIO2 / ikd-tree 和 faster-lio / ivox 代码详解本文目的FAST-LIO2faster-lio本文目的
港大的FAST-LIO2和高博团队提出的faster-lio可以说是目前最先进的LIO算法了。他们最突出且最重要的工作应该是提出了两种增量式的点云组织算法。增量式更新是SLAM研究里非常核心的话题…

【探索AI未来】自动驾驶时代下的人工智能技术与挑战
自我介绍⛵ 📣我是秋说,研究人工智能、大数据等前沿技术,传递Java、Python等语言知识。 🙉主页链接:秋说的博客 📆 学习专栏推荐:MySQL进阶之路、C刷题集、网络安全攻防姿势总结 欢迎点赞 &…
车载设备有哪些需要用到物联卡
随着科技的发展,现在汽车智能化已经成为汽车改革的一个趋势,其中智能化最重要的就是实现汽车的联网与数据的传输。在车联网领域的应用解决了交通拥堵、车辆定位等问题,使车辆管理更加智能化、智慧化。物联网卡在社会各行业的广泛应用…
树莓派C++开发机器人智能小车(3)远程登录树莓派
视频演示地址:https://edu.51cto.com/sd/4920a
我们要使用树莓派创建可移动的机器人,如果显示器、键盘鼠标都直接连接Raspberry Pi,会限制它的移动。为了不带外设,也是节约外设,我们要经由Wi-Fi无线连接树莓派…

树莓派C++开发机器人智能小车(1)概述
视频演示:https://edu.51cto.com/sd/4920a
都说C入门难,今天我们就来聊聊它到底难在哪儿? 语言本身是一方面,因为语法特性、规则比较多,学起来不是那么轻松。缺乏系统的开发经验是另一方面。很多人都是已经通过看书…
立体匹配简介(Stereo Matching/stereo correspondence)
该问题的任务是从双目相机所获取的左眼图像和右眼图像中恢复出逐像素点的深度。由于双目相机中的平行极线约束,该问题又转化为左右眼图之间的逐像素匹配问题。受限于训练数据的数量,同时也因为可能未找到该问题下的最佳网络结构,深度学习中的…
三维点云处理03-Radius Outlier Remove代码实现
三维点云处理03-Radius Outlier Remove代码实现
半径滤波思想 设定一个固定的半径范围,对每个点在该半径范围内查找最近点,并设定最近点最低数量阈值,如果某个点在该半径范围内的最近点的数量小于该最低数量阈值,则认为该点为离群…

通用人工智能之路:什么是强化学习?如何结合深度学习?
目录 1 ChatGPT中的强化学习2 环境与智能体的交互3 强化学习特征四元组4 深度强化学习的引入5 教程大纲加入我们 1 ChatGPT中的强化学习
2015年,OpenAI由马斯克、美国创业孵化器Y Combinator总裁阿尔特曼、全球在线支付平台PayPal联合创始人彼得蒂尔等硅谷科技大亨…
三维点云处理01-PCA代码实现
三维点云处理01-PCA代码实现
基础知识点
1.特征值与特征向量的意义
2.方阵的特征值分解(nxn)
3.一般矩阵的特征值分解(mxn)——SVD 分解
4.谱定理
5.瑞立熵代码实现(python)
#!/usr/bin/python3import o…
PCL学习笔记——利用KDTree进行近邻搜索
PCL学习笔记——利用KDTree进行近邻搜索
k-d树(k-dimensional树的简称),是一种分割k维数据空间的数据结构。主要应用于多维空间关键数据的搜索(如:范围搜索和最近邻搜索)。K-D树是二进制空间分割树的特殊的…

MDC300的ADSFI框架介绍
文章目录什么是ADSFI框架?ADSFI应用框架图MDC300上有哪些ADSFI框架?各个ADSFI框架的联系单个ADSFI框架的构成单个ADSFI框架中的yaml文件什么是ADSFI框架?
ADSFI(Autonomous Driving Service Framework Initiative) AD…
Autoware中pure pursuit纯跟踪算法的代码分析(一)
目录pure pursuit纯跟踪算法的简介源码分析文件简介涉及到的两个类框架性函数介绍算法实现函数(按顺序介绍)computeLookaheadDistancegetNextWaypointcalcCurvaturecalcRelativeCoordinatecanGetCurvatureconvertCurvatureToSteeringAnglepure pursuit纯…
直播回顾 | seL4 基金会主席谈物理系统安全工程实践
9 月 16 日下午,seL4 基金会主席、悉尼新南威尔士大学教授 Gernot Heiser,以及鉴释 CEO 梁宇宁,围绕下一代汽车操作系统微内核 seL4,在直播间分享了 seL4 的验证故事及其实际的工程实践,此次直播是中英双语进行&#x…

【预告】网络研讨会|下一代汽车操作系统微内核seL4:seL4基金会主席谈物理系统安全工程实践
seL4 微内核是世界上第一个具有实现正确性和安全执行的数学、机器检查证明的操作系统 (OS) 内核。它在Arm和RISC-V处理器上的全面证明仍然是独一无二的。它也是开源的、免费使用的性能基准,并得到中立的、非营利的 seL4 基金会的支持。多年前,它已在军用…

实时识别骰子的点数_Halcon
本文就把这种用Halcon编写的实时识别色子点数的算法分享出来 本文会有两个关于图像分割的 核心算法: 距离变换与分水岭算法 即 distance_transform (ConnectedRegions, DistanceImage, ‘octagonal’, ‘true’, 1000, 1000) 与 watersheds_threshold (ImageScaleMa…

自动驾驶-YOLOV5网络训练(可能会遇到五个坑)
1、环境:
操作系统:Ubuntu20.04
Python3.9
Pytorch1.10.2
IDE:(本人使用的是ECLIPSE)
显卡:NVIDIA GeForce GTX 1060 6GB
2、网络训练
在YOLOV5目标下,选择:train.py…
使用数据集对SegFormer模型进行微调以改进自动驾驶车辆的车道检测-附源码下载
SegFormer:细分严重影响了高级驾驶辅助系统的开发。它在自动驾驶汽车技术的快速发展中发挥了关键作用。它由多个复杂的组件组成。对于任何在道路上行驶的车辆来说,车道检测至关重要。车道是道路上的标记,有助于区分道路上的可行驶区域和不可行驶区域。当前一代有多种车道检测…

MessagePassing分析与说明
1 Motivation
在图神经网络中,如何像在欧式空间一样进行卷积操作,其重要的问题在于如何更新当前位置的信息。 其每个位置(或者叫节点node)的更新方式如下所示。 这一个式子既可以表达GCN,也可以表达Edge Conv。
2 函…
Python解析Autosar 标准文件(arxml)---按行解析内容。
Python解析Autosar 标准文件(arxml)—按行解析内容。
1 arxml文件 ARXML文件是以AUTOSAR XML (ARXML)格式保存的配置文件,实质是一个XML文件;它被AUTOSAR使用,AUTOSAR是2003年由汽车制造商和供应商组成的一个项目,用于为汽车电子控制单元(ECUs)建立软件体系结构;ARXML文…
自动驾驶 PointNet++ 点云处理原理与代码实战 2(代码部分)
文章目录PointNet 物体分类代码PointNet 部件分割代码PointNet 语义分割代码物体分类 DataLoader部件分割 DataLoader语义分割 DataLoader数据增强 Data Augmentation物体分类训练代码测试代码部件分割 训练代码训练代码测试代码语义分割 训练代码训练代码测试代码PointNet 物体…

自动驾驶车辆轨迹跟踪
相对于传统的模型预测控制(MPC),简化的车辆模型通常会导致预测结果不准确,这对车辆的转弯等行为具有负面影响。因此作者提出了一种轨迹规划和跟踪框架:
该框架应用人工势场来获得目标轨迹;并利用具有PID反…

树莓派C++开发机器人智能小车(5)智能小车底盘及电机
开始建造机器人智能小车之前,选择好的小车底盘是最重要的活动之一。机器人底盘就像人类的骨骼。我们的骨骼由骨头组成,为我们的器官提供支撑。同样的,好的底盘会提供为电子组件提供合适的支持并保持一体。我们可以直接从网上购买,挑选的时候注意:
(1)有的智能小车是单个…
树莓派C++开发机器人智能小车(11)超声波传感器连线和编程
edu.51cto.com/sd/4920a
HC-SR04传感器引脚由4个:VCC,GND,发射,echo, RPi和超声波传感器这样连接: 连接传感器VCC引脚到引脚4连接传感器GND引脚到引脚9连接传感器Trig引脚到wiringPi引脚12传感器echo引脚经过分压器后连接到wiringPi引脚13。分压器电路的两个电阻分别是1K…
使用ros3djs案例心得总结之_第23篇类似rviz显示机器人当前地图箭头可视化实现
目录
一、简介
二、运行服务器turtlebot 仿真机器人
三、 新建web脚本
四、测试显示效果 一、简介 虽然上一讲把地图上车体框显示出来了,但是不知道机器人在当前地图
辅助驾驶功能开发-功能算法篇(7)-2-ACC-算法设计方案
1.关键变量名及其含义 全局变量 last_spd_delta 上一次计算的期望速度变化量 spd_var_RampRate 前后两次速度变化量的最大值 局部变量 follow_dist_expected 期望的跟车距离 spd_var_expected 期望的速度变化量 obs_relative_spd 有效ACC目标的相对速度,+远离,-接近。原始输入…
自动驾驶 | 激光雷达传感器的核心——MEMS技术
“基于MEMS技术的激光雷达传感器价格较低,但其性能不足以用于自动驾驶车辆。”我们经常听到这样的说法。本文将解释我们的传感器如何使这一说法失效,我们如何为激光雷达开发MEMS技术,如何为激光雷达找到理想的镜面尺寸并说明其决定因素。 汽车…
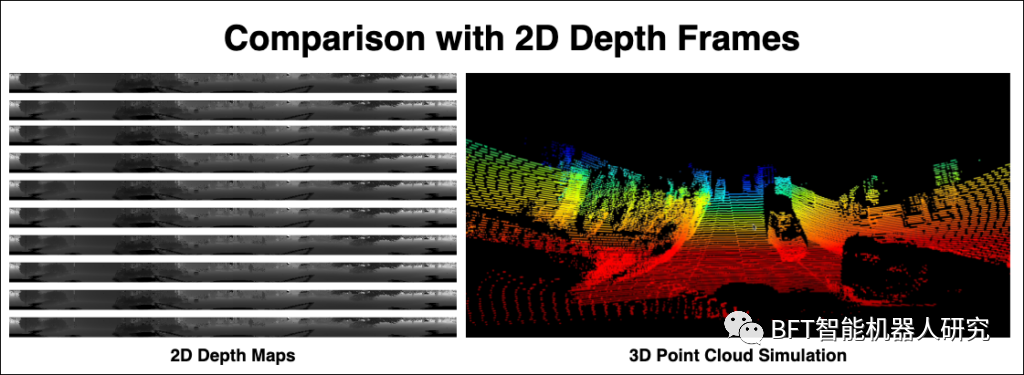
使用Open3D实现3D激光雷达可视化:以自动驾驶的2DKITTI深度框架为例(下篇)
原创 | 文 BFT机器人 【原文链接】使用Open3D实现3D激光雷达可视化:以自动驾驶的2DKITTI深度框架为例(上篇) 05
Open3D可视化工具 多功能且高效的3D数据处理:Open3D是一个全面的开源库,为3D数据处理提供强大的解决方…
ROS | ros::NodeHandle::param()
文章目录 概述一、定义介绍二、功能作用三、使用方法四、实例演示概述 本节详细介绍了ros::NodeHandle::param()函数的功能及区别。
一、定义介绍 先看一下ros::NodeHandle::param()函数的原型:
bool ros::NodeHandle::param ( const std::string & param_name,T &…
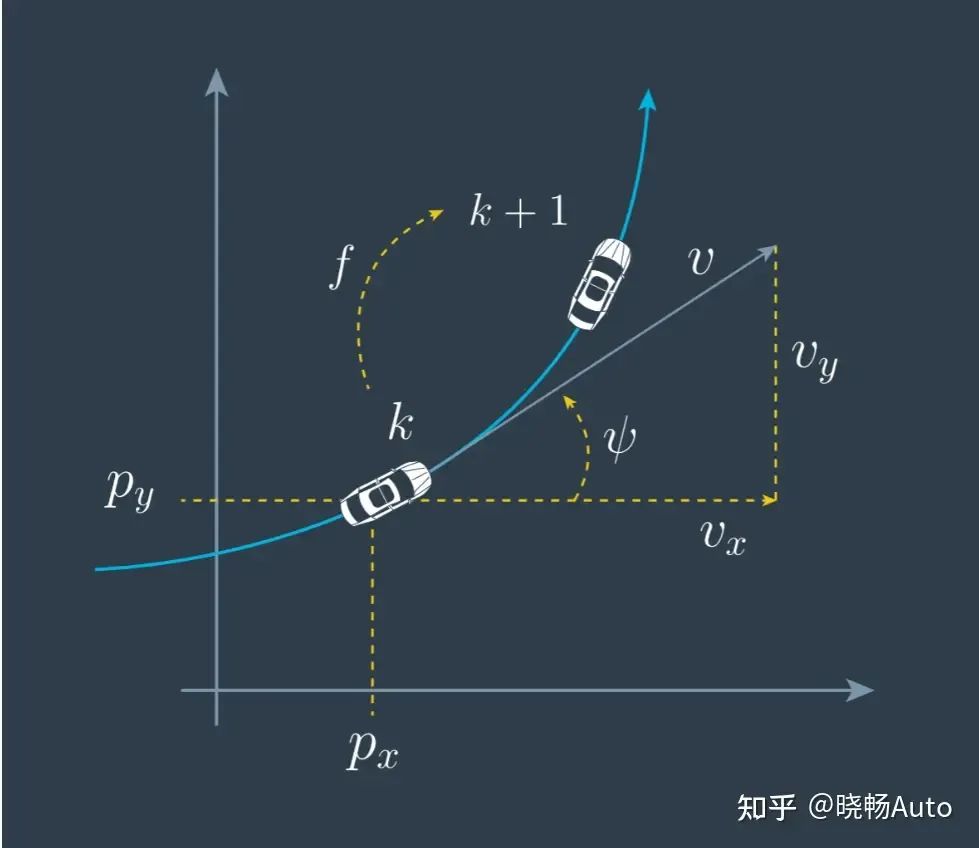
纯跟踪算法(Pure persuit)
纯跟踪局部路径规划器
在得到局部路径之后,本项目使用纯跟踪算法通过横向控制器反馈控制小车的转角,从而达到跟踪局部路径的效果,经实验确认,跟踪效果很好。
纯跟踪算法原理如下:
在搭建模型时可以将小车看作车辆运…
PCL点云库(4) — console模块
目录
4.1 time时间打印
4.2 print
4.3 parse
◆ find_switch()
◆ find_argument()
◆ parse()
◆ parse_2x_arguments()
◆ parse_3x_arguments()
◆ parse_x_arguments()
◆ parse_multiple_arguments()
◆ parse_multiple_2x_arguments()
◆ parse_multiple…
【运动规划算法项目实战】如何实现三次样条插值
文章目录 前言一、三次样条插值简介1.1 基本原理1.2 三次样条插值优缺点1.3 三次样条插值的适用场景二、代码实现2.1 CubicSpline类的实现2.2 三次样条插值后路径的可视化2.3 启动2.2 相关话题2.3 节点连接关系三、总结前言
三次样条插值是一种广泛应用于数据拟合和插值的方法…
【逐函数详细讲解ORB_SLAM2算法和C++代码|LocalMapping|1-12】
这段代码中,LocalMapping类是ORB_SLAM2算法中的局部地图构建模块。局部地图构建的任务包括处理新的关键帧、创建新的地图点、地图点筛选、关键帧筛选以及与相邻关键帧的地图点搜索。LocalMapping类在SLAM系统中与跟踪(Tracking)、闭环检测(LoopClosing)等其他模块共同工作…
apollo云实验:定速巡航场景仿真调试
定速巡航场景仿真调试 概述启动仿真环境仿真系统修改默认巡航速度 实验目的福利活动 主页传送门:📀 传送 概述 自动驾驶汽车在实现落地应用前,需要经历大量的道路测试来验证算法的可行性和系统的稳定性,但道路测试存在成本高昂、…
辅助驾驶功能开发-功能对标篇(15)-NOA领航辅助系统-吉利
1.横向对标参数 厂商吉利车型FX11/EX11/DCY11/G636上市时间2022Q4方案6V5R+1DMS摄像头前视摄像头1*(8M)侧视摄像头/后视摄像头1环视摄像头4DMS摄像头1雷达毫米波雷达54D毫米波雷达/超声波雷达12激光雷达/域控供应商福瑞泰克辅助驾驶软件供应商福瑞泰克高精度地图百度芯片TDA4 T…
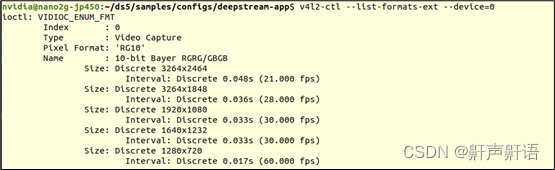
如何查看相机的配置信息,以及获取相机当前状态信息---deepstream
sudo apt-get install v4l2-utils
v4l2-ctl --list-devicesv4l2-ctl --list-formats-ext --device0
v4l2-ctl --list-formats-ext --device1参考链接: https://www.elecfans.com/d/1677110.html
自动驾驶 | SIL测试简单介绍
SIL(software in-the-loop)测试,软件在环测试,通过运行系统环境中的车辆模型和虚拟ECU中的I/O模型来模拟控制器所需的各种传感器信号,并能接收台架传感器的信号和虚拟ECU发出的控制信号…
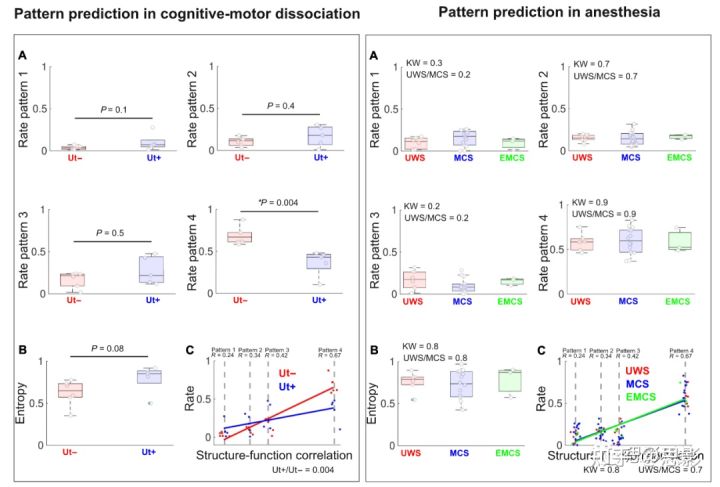
人类意识由大脑信号协调的复杂动态模式支持
通过采用大脑动力学框架衡量人类意识,我们确定了在脑损伤之后的有意识和无意识状态下,动态信号的协调是否具有与之相关的特定、可概括的模式。结果发现,健康个体和有最小化意识状态的患者分别表现出协调和不协调的功能磁共振成像信号的动态模…

ubuntu20.04 Supervisor 开机自启动脚本一文配置
前言: 最近发现一种非常好的开机启动服务方式,不光可以开机自启动,而且还可以进行开机节点的进程守护,这样大大确保了线程的稳定情况,这种服务甚至可以守护开机的进程,所以比之前设置 rc.local 开机自启动脚本一文配置节点好出很多,它甚至可以使用网页登录监管我开机自启…
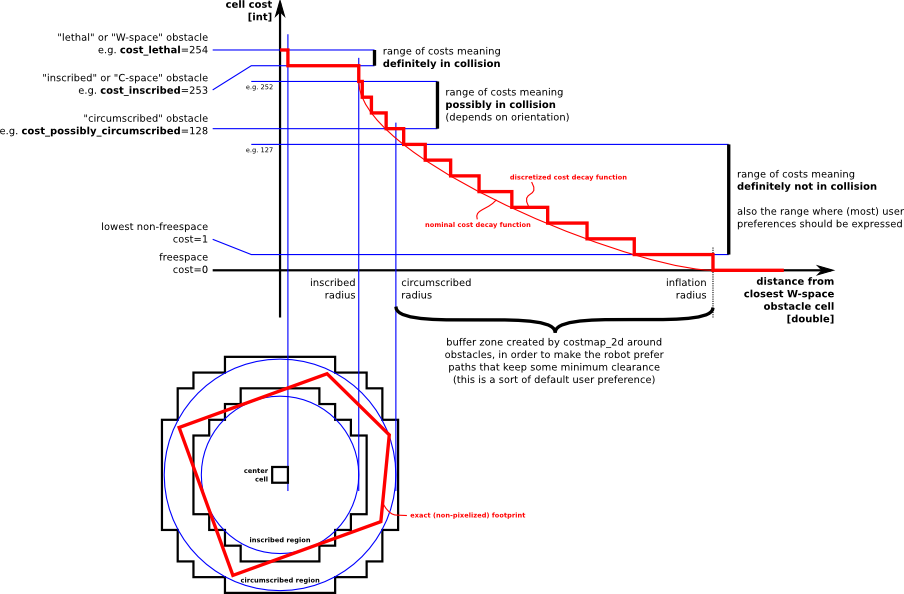
机器人控制算法——TEB算法—Obstacle Avoidance and Robot Footprint Model(避障与机器人足迹模型)
1.How Obstacle Avoidance works
1.1处罚条款
避障是作为整体轨迹优化的一部分来实现的。显然,优化涉及到找到指定成本函数(目标函数)的最小成本解(轨迹)。简单地说:如果一个计划的(未来&…

Spring Cloud入门系列(六)——负载均衡之Ribbon
概述
负载均衡 集中式LB 进程内LB
架构说明 其实ribbon已经被Eureka整合进去了。
RestTemplate Ribbon的负载策略
IRule是Ribbon实现负载均衡的顶层接口。
自定义策略 在80端口,新增com.banana.rule.MyRule文件
MyRule
package com.banana.rule;import co…
自动驾驶学习笔记(六)——Apollo安装
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往:
《自动驾驶新人之旅》免费课程—> 传送门
《2023星火培训【感知专项营】》免费课程—>传送门 文章目录
前言
Apollo安装
硬件配置
安装Ubuntu…

功能定义-变道碰撞预警
功能概述
变道碰撞预警(Lane Change Warning)功能包括两个子功能: ——盲区监测(Blind Spot Detection),其功能表现为实时监测驾驶员视野盲区,并在其盲区内出现其他道路使用者时发出提示或警示信息 ——接近车辆报警(Closing Vehicle Warnin…
![[学习笔记-SLAM篇]KITTI数据集轨迹说明](https://img-blog.csdnimg.cn/20210616210626801.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3dhcm5pbmdtX2Rt,size_16,color_FFFFFF,t_70)
[学习笔记-SLAM篇]KITTI数据集轨迹说明
KITTI数据集做SLAM的话应该都有所耳闻,但过于庞大的压缩包以及运行一次就可能卡住的风险以及不知轨迹几何所以随机运行的偶然性 让我决定整理一下KITTI的轨迹,便于选择对应序列测试。 考虑到pose真值中只有11(00-10)个轨迹真值&am…

Apollo源码剖析学习笔记2
Apollo 源码剖析学习笔记2
Talker-ListenerNode
目录中包含了 Node 对象、Reader 对象和 Writer 对象。Node 对象主要对应 Ros 中的 Node 节点,在Node 节点中可以创建 Reader 和 Writer来订阅和发布消息,需要管理对应的通道注册:
创建Node 对象
在 C…

SLAM总结(二)-数学基础之求导和线性方程求解
SLAM总结(二)-数学基础之求导和线性方程求解1.求导:高数中常见的是一个函数对一个自变量求导,属于标量对标量求导。在SLAM问题中,函数是目标函数(残差项,约束项),一般包含…
综述:自动驾驶中的 4D 毫米波雷达
论文链接:《4D Millimeter-Wave Radar in Autonomous Driving: A Survey》
摘要
4D 毫米波 (mmWave) 雷达能够测量目标的距离、方位角、仰角和速度,引起了自动驾驶领域的极大兴趣。这归因于其在极端环境下的稳健性以及出色的速度和高度测量能力。 然而…
从零搭建一台基于ROS的自动驾驶车-----2.运动控制
系列文章目录
北科天绘 16线3维激光雷达开发教程 基于Rplidar二维雷达使用Hector_SLAM算法在ROS中建图 Nvidia Jetson Nano学习笔记–串口通信 Nvidia Jetson Nano学习笔记–使用C语言实现GPIO 输入输出 Autolabor ROS机器人教程 从零搭建一台基于ROS的自动驾驶车-----1.整体介…
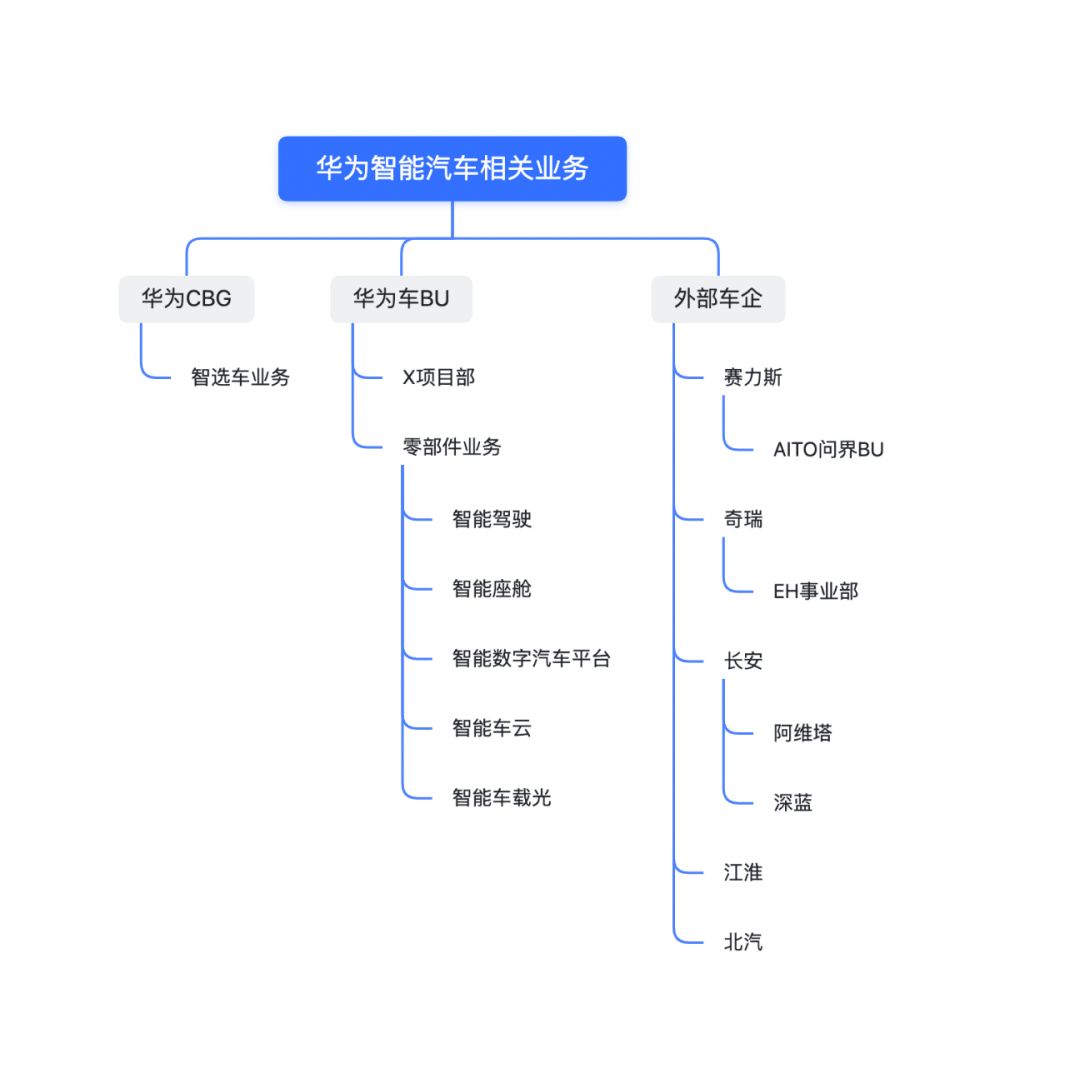
华为拆分零部件业务,长安入股,赛力斯接洽中
作者 |德新
编辑 |王博 11月26日,长安汽车官宣与华为在智能汽车零部件业务上的投资与合作:
华为拟成立一家新的公司,并将其在智能汽车解决方案业务上的核心技术和资源注入新公司,长安汽车及关联方有意投资该新公司。
参照目前长…
![[ROS2 知识] [Action综合] (3)python实现的服务-客户端](https://img-blog.csdnimg.cn/6e393d9877f44bf38cc810e9b4c41fbc.png)
[ROS2 知识] [Action综合] (3)python实现的服务-客户端
一、说明 action是 ROS 2 中的一种异步通信形式。动作客户端将目标请求发送到动作服务器。行动服务器将目标反馈和结果发送给行动客户端。本文将python实现action服务和客户端。 二、服务器代码编制
2.1 先决条件 您将需要 action_tutorials_interfaces 包和 Fibonacci.action…
图像识别在自动驾驶和智能安防中的关键应用
图像识别在自动驾驶和智能安防中的关键应用
随着人工智能和深度学习技术的发展,图像识别已经成为了自动驾驶和智能安防领域的关键应用之一。图像识别技术能够通过处理和分析图像数据,帮助自动驾驶车辆和智能安防系统实现更准确、更高效的运行。本文将介…
【无2021年金属非金属矿山安全检查(地下矿山)考试总结及金属非金属矿山安全检查(地下矿山)模拟试题
题库来源:安全生产模拟考试一点通公众号小程序
安全生产模拟考试一点通:金属非金属矿山安全检查(地下矿山)考试总结是安全生产模拟考试一点通总题库中生成的一套金属非金属矿山安全检查(地下矿山)模拟试题…
【无2021年防爆电气免费试题及防爆电气作业考试题库
题库来源:安全生产模拟考试一点通公众号小程序
安全生产模拟考试一点通:防爆电气免费试题是安全生产模拟考试一点通总题库中生成的一套防爆电气作业考试题库,安全生产模拟考试一点通上防爆电气作业手机同步练习。2021年防爆电气免费试题及防…
void Tracking::StereoInitialization()在ORB_SLAM2算法中的用途
在ORB-SLAM2算法中,StereoInitialization()函数是用于对双目相机进行立体视觉初始化。在立体视觉SLAM中,初始化是确定初始关键帧、地图点以及相机位姿的关键步骤。这个函数在成功初始化后,将SLAM系统状态设置为OK,为后续的跟踪、定位和地图构建做好准备。以下是这个函数中的…

用于自动驾驶的基于深度学习的图像 3D 物体检测:综述
论文地址:https://ieeexplore.ieee.org/abstract/document/10017184/
背景
准确、鲁棒的感知系统是理解自动驾驶和机器人驾驶环境的关键。自动驾驶需要目标的 3D 信息,包括目标的位置和姿态,以清楚地了解驾驶环境。 摄像头传感器因其颜色和…
CasADi - 最优控制开源 Python/MATLAB 库
系列文章目录 文章目录 系列文章目录前言一、介绍1.1 CasADi 是什么?1.2 帮助与支持1.3 引用 CasADi1.4 阅读本文档 二、获取与安装三、符号框架3.1 符号 SX3.1.1 关于命名空间的说明3.1.2 C 用户注意事项 3.2 DM3.3 符号 MX3.4 SX 和 MX 混合使用3.5 稀疏类3.5.1 获…
9.8 校招 实习 内推 面经
绿泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、校招 | 长安福特2024校园招聘正式启动
校招 | 长安福特2024校园招聘正式启动 2、2023校招总结--SLAM岗位 - 5
2023校招总结--SLAM岗位 - 5 3、校招&实习 | 格灵深瞳2024秋季校园招聘启…

Carla自动驾驶仿真四:pygame渲染Camera画面及车辆控制(代码详解)
文章目录 前言一、依赖库安装1、pygame安装2、numpy安装 二、Pygame渲染Carla Camera画面1、连接Carla并初始化TrafficManager2、生成自动驾驶车辆并设置交通行为3、创建初始化pygame surface对象的函数4、创建pygame处理Carla图像的回调函数5、创建pygame键盘控制车辆运动的函…
(01)ORB-SLAM2源码无死角解析-(24) 单目SFM地图初始化→CreateInitialMapMonocular()-细节分析:尺度不确定性
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
自动驾驶多传感器融合学习笔记
目录
BevFusion
liar,radar: BevFusion
BevFusion是一种多传感器融合技术,它可以将来自不同传感器(如LiDAR和相机)的数据融合到一个统一的BEV表示中。BevFusion的优点在于它能够结合多种传感器的优点,从…
姿态估计1-01:FSA-Net(头部姿态估算)-资源下载(前奏准备)
以下链接是个人关于FSA-Net(头部姿态估算) 所有见解,如有错误欢迎大家指出,我会第一时间纠正。有兴趣的朋友可以加微信:17575010159 相互讨论技术。若是帮助到了你什么,一定要记得点赞!因为这是对我最大的鼓励。文末附…
【ROS2】组件程序开发
一、说明 所谓组件工程,是指将某些功能函数(类)做成动态链接库的部分,在运行时调入。在调用功能类时,会调入、释放过程。因此,这里首先知道如何用动态链接库调入功能,然后知道如何才是组件。组件还有其它特性,我们将在后续中叙述。 二、构建动态链接库 因为组件需要动态…

ADAS工程师的成长之路——ACC法规(ISO 15622-2018 — Adaptive cruise control systems)
文章目录0 Introduction /介绍1 Scop / 范围2 Normative references / 规范性引用3Terms and definitions/术语和定义4 Symbols and abbreviated terms/符号和缩写词5 Classification/分类6 Requirements/需求6.1 Basic control strategy/基础控制策略6.2 Functionality/功能需…
自动驾驶 3D点云深度学习与实践 二 基于Point的3D深度学习
文章目录PointNetPointNetPointNet PointNet 这里最远点采样FPS,回答了我昨天的疑问,为什么要采样,因为不同的物体,点云数量是不同的,这对于模型的输入是不合适的。我们通过采样将不同物体的点云数量表示成相同的。另外…
LLA(经纬高)坐标转换成ENU(东北天)坐标的详细推导
这是一篇经纬高(LLA)坐标转东北天坐标(ENU)的详细推导,并给出近似转换的过程和结果
参考资料: https://blog.csdn.net/qq_34213260/article/details/109133847 ECEF坐标系和ENU坐标系之间的关系如上图所示…
【Emotion】 自动驾驶最近面试总结与反思
outline 写在前面面试问题回顾和答案展望
写在前面
最近由于公司部门即将撤销,开始了新一轮准备。 发现现在整体行情不太乐观,很看过去的尤其是量产的经验 同时本次面试我coding环节答得不好,(其实也是半年前大家问的比较简单…
五. 激光雷达建图和定位方案-引言
前面内容: 一. 器件选型心得(系统设计)--1_goldqiu的博客-CSDN博客
一. 器件选型心得(系统设计)--2_goldqiu的博客-CSDN博客
二. 多传感器时间同步方案(时序闭环)--1
三. 多传感器标定方案&a…
Carla仿真二:Carla多视图切换代码详解
文章目录前言一、Carla多视图切换效果二、Camera安装坐标系1、Carla.Location2、Carla.Rotation三、接口及代码详解1、接口介绍2、生成上帝视图代码3、生成Camera视图代码四、完整代码前言
1、Carla提供了大量的Python API接口,用户可以通过查找文档实现各类功能&a…
辅助驾驶功能开发-功能规范篇(16)-2-领航辅助系统NAP-自动变道-2
书接上回 2.3.4.3 系统主动变道
(1)变道需求输入 在NOA功能功能激活状态下,系统接收驾驶员请求或根据导航引导信息及道路环境信息获取变换车道的需求,包含导航引导路线的变道需求和智能避让变道需求。
导航引导变道需求 导航引导模式下的主动变道包括上高速由匝道并入主路、…
自动驾驶 知识点 Review 2D 感知算法 一(两阶段法 R-CNN系列,FPN,R-FCN)
文章目录R-CNN系列R-CNNR-CNNFast RCNNFaster RCNNFPNR-FCNR-CNN系列
R-CNN 两个步骤:1)提取物体区域;2)对区域进行分类识别; 本章所有模型都基于这个思想。但是YOLO不是。
R-CNN 找到2000个可能出现物体的区域&…
自动驾驶 PointNet++ 点云处理原理与代码实战 1(代码部分)
文章目录PointNet 模型代码详解PointNet 点云处理任务的代码PointNet 物体形状分类代码PointNet 部件分割代码PointNet 语义分割代码PointNet Util工具函数代码Farthest Point Sample 最远点采样Ball Query 球查询Sample and GroupSet Abstraction分割中的 Feature Prepogation…
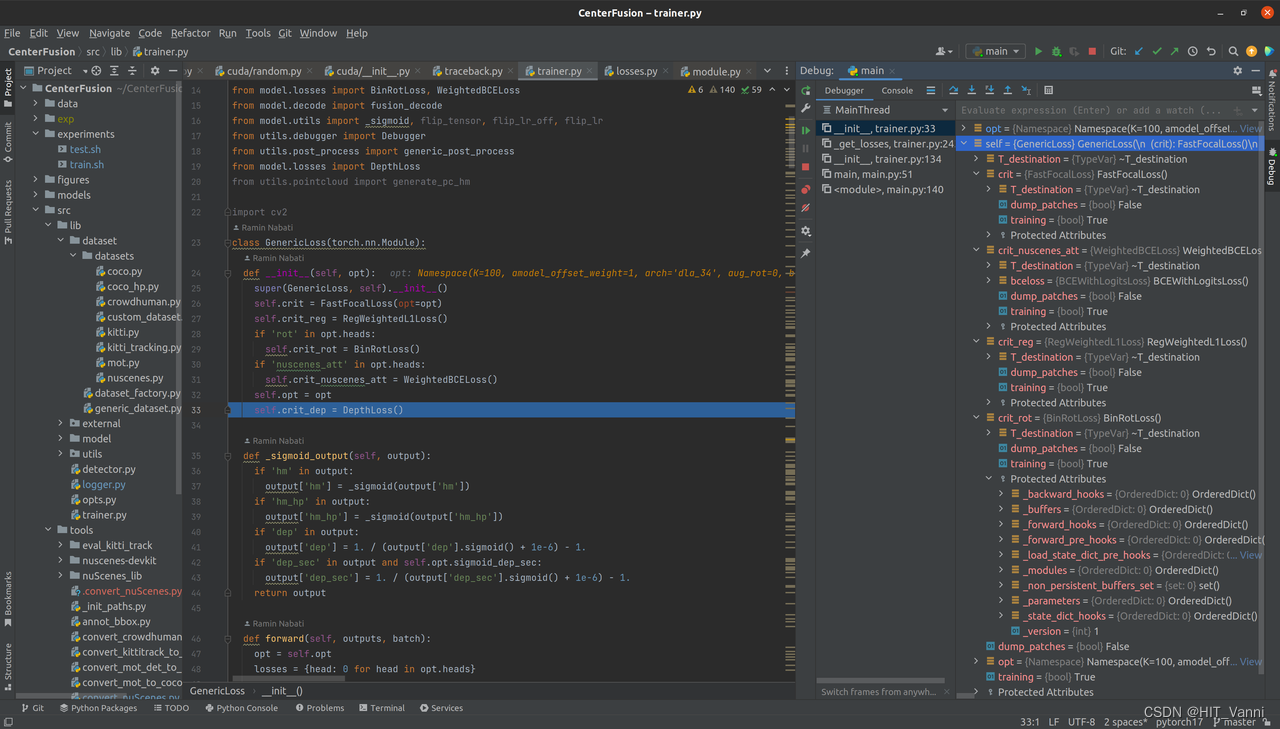
详解CenterFusion损失函数初始化及前向传播过程
CenterFusion损失函数Loss初始化_get_losses函数以及计算过程forward函数 1. 损失函数初始化前序运行逻辑2. 损失函数初始化2.1 loss函数初始化——Trainer类中的_get_losses()函数2.2 model_with_loss的初始化 3. loss计算过程前序运行逻辑4. loss计算过程4.1 loss计算函数调用…
算法公式推导——ICP
文章目录1,算法输入2,目标函数3,理论推导步骤1:步骤2:步骤3:4,算法总结:5,附录:前言:点云配准中的迭代最近点(Iterative Closest Poin…
自动驾驶领域常见的坐标系
在自动驾驶系统中,为了表示和处理各种空间信息,需要使用多种不同的坐标系。以下是几种在自动驾驶领域常见的坐标系: 全局坐标系(Global Coordinate System):以地球表面为参考系建立的坐标系,用于…
超声波USS 温度补偿和降噪
车载超声波传感器主要用于测量与障碍物之间的距离,以辅助驾驶员进行停车或避免碰撞。然而,温度和噪声会影响超声波传感器的性能。为了获得准确的测量结果,需要对这些因素进行补偿和降噪。
温度补偿
温度会影响超声波在空气中的传播速度&…
自动驾驶轨迹规划之碰撞检测(三)
欢迎大家关注我的B站:
偷吃薯片的Zheng同学的个人空间-偷吃薯片的Zheng同学个人主页-哔哩哔哩视频 (bilibili.com)
目录
1.基于圆覆盖
2.BVH
3.MATLAB自动驾驶工具箱
4 ROS内置的模型 自动驾驶轨迹规划之碰撞检测(一)-CSDN博客
自动驾…
open3d-KDTree使用
open3d-KDTree使用
从PCD文件中读取点云并建立KDTree
#读取pcd文件
pcd o3d.io.read_point_cloud("../../TestData/Feature/cloud_bin_0.pcd")
#将点云颜色设为相同
pcd.paint_uniform_color([0.5,0.5,0.5])
#建立KDTree
pcd_tree o3d.geometry.KDTreeFlann(pcd)…
10月22日,每日信息差
今天是2023年10月22日,以下是为您准备的13条信息差
第一、库迪咖啡计划到2025年底全球门店数量达2万家,库迪咖啡开业一周年全球门店数量达到6061家,位居全球第四
第二、超高速纯硅调制器取得创纪录突破,国际上首次把纯硅调制器带…
![#每周一篇论文2#[感知] 激光雷达外参数自标定](https://img-blog.csdnimg.cn/20210131205743245.PNG?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L2hnel9ncw==,size_16,color_FFFFFF,t_70#pic_center)
#每周一篇论文2#[感知] 激光雷达外参数自标定
目录激光雷达外参数自标定点云滤波设置ROI地平面分割计算变换矩阵系统评价参数输出最优输出校准效果资源下载激光雷达外参数自标定
基于激光雷达的车载三维重建系统和感知系统工作时需要对激光雷达的外参数(三个旋转参数和三个平移参数)进行标定。 激光雷达的外参数的标定是指…
辅助驾驶功能开发-功能规范篇(27)-3-导航式巡航辅助NCA华为
书接上回
2.2.2.3.7控制模块 控制模块由横向控制和纵向控制组成。根据横、纵向规划给出的行驶轨迹和给定速度,进行车辆的纵横向控制,输出方向盘转角、加速度或制动踏板开度和档位信息,必要条件下输出车灯信号等。
2.2.2.4 行为仲裁模块
纵向状态: 当纵向位于Off/Standby…
2022年升降机司机考试题及答案
题库来源:安全生产模拟考试一点通公众号小程序
2022年升降机司机理论题库为升降机司机考试题目新版习题库!2022年升降机司机考试题及答案根据升降机司机新版考试题库。升降机司机考试资料通过安全生产模拟考试一点通上手机同步练习。
1、【多选题】事故…

An Auto-tuning Framework for Autonomous Vehicles
动机:
As the scenario becomes more complicated, tuning to improve the motion planner performance becomes increasingly diffificult. To systematically solve this issue, we develop a data-driven auto-tuning framework based on the Apollo autonomous…
【无标题】2021年施工升降机司机(建筑特殊工种)试题及解析及施工升降机司机(建筑特殊工种)实操考试视频
题库来源:安全生产模拟考试一点通公众号小程序
安全生产模拟考试一点通:安全生产模拟考试一点通:施工升降机司机(建筑特殊工种)试题及解析是安全生产模拟考试一点通总题库中生成的一套施工升降机司机(建筑特殊工种)实操考试视频,…
2021年资料员-岗位技能(资料员)考试内容及资料员-岗位技能(资料员)考试总结
题库来源:安全生产模拟考试一点通公众号小程序
安全生产模拟考试一点通:资料员-岗位技能(资料员)考试内容是安全生产模拟考试一点通生成的,资料员-岗位技能(资料员)证模拟考试题库是根据资料员-岗位技能(资料员)最新版教材汇编出资料员-岗位…
2021年资料员-通用基础(资料员)考试及资料员-通用基础(资料员)考试试卷
题库来源:安全生产模拟考试一点通公众号小程序
安全生产模拟考试一点通:资料员-通用基础(资料员)考试是安全生产模拟考试一点通生成的,资料员-通用基础(资料员)证模拟考试题库是根据资料员-通用基础(资料员)最新版教材汇编出资料员-通用基础…

全球自动驾驶竞争力最新排行榜,4家中国企业上榜
发展至今,自动驾驶技术不仅是汽车行业的一个主战场,更是全球科技领域中备受关注和充满竞争的一个重要领域。近年来,各大汽车制造商和科技公司都在投入大量财力物力人力进行自动驾驶技术的研发,并进一步争夺市场份额。
当然&#…
大疆 行者无疆(一)
目录 1.技术铸品牌之基 2.应用场景壮品牌之骨 3.传播强品牌之势
近日,正式发布Mavic 3行业无人机的大疆,搬迁新建办公楼天空之城的大疆,被美国防部列入黑名单的大疆,再次霸占热搜和头条。惊艳唯美和至暗交织,否泰相依…

自动驾驶TPM技术杂谈 ———— CCRT验收标准(评分标准)
文章目录介绍评价方法指标体系算分方法一级指标二级指标三级指标四级指标五级指标行车辅助能力得分说明跟车能力得分说明前车静止识别与响应得分说明前车低速识别与响应得分说明前车减速识别与响应得分说明前车切入识别与响应得分说明前车切出识别与响应得分说明跟随前车起停得…
CarSim仿真快速入门(二十五)-基于CarSim的Euro NCAP ACC测试
Euro NCAP(欧洲新车评估计划)是欧洲新车评估计划的缩写,由一个自愿的五星级安全评级系统组成,自1996年以来一直存在。该评估协议由一系列的车辆测试组成,目的是帮助消费者和企业在安全性能方面对车辆进行相对比较。
在自动驾驶辅助系统(ADAS)的辅助驾驶-公路辅助系统的…
PCL点云库(3) — common模块
目录
3.1 common模块中的头文件
3.2 common模块中的基本函数
(1)angle角度转换
(2)distance距离计算
(3)random随机数生成
(4)sping扩展模块
(5)time获…

Autoware中pure pursuit纯跟踪算法的代码分析(二)
目录calcRelativeCoordinate函数详解calcRelativeCoordinate函数详解
calcRelativeCoordinate函数原型如下:
// calculation relative coordinate of point from current_pose frame
geometry_msgs::Point calcRelativeCoordinate(geometry_msgs::Point point_msg…

鉴释人物丨专访解决方案负责人卜祥敏:直击业务痛点,赋能客户高效业务逻辑
从家门口的智能门锁到路上驰骋的自动驾驶车辆,人工智能、区块链、5G等新技术不断推动物联网的快速发展,在这背后离不开底层代码及技术架构的支持。那么软件开发人员如何快速识别代码缺陷和安全隐患?
卜祥敏,鉴释解决方案负责人&a…
CenterFusion数据集nuScence_COCO格式
CenterFusion数据集nuScence_COCO格式 CenterFusion数据格式概述CenterFusion数据格式详解1. "images": [image]1.1. “calib“键位1.2. “trans_matrix“键位1.3. “velocity_matrix“键位1.4. "radar_pc"键位1.5. "images"JSON文件详解 2. &qu…

【手把手教你】搭建神经网络(3D点云分类)
大家好,我是羽峰,今天要和大家分享的是一个基于PointNet的3D点云分类研究。文章会把整个代码进行分割讲解,完整看完,相信你一定会有所收获。
该示例实现了开创性的点云深度学习论文PointNet (Qi et al., 2017)。 有关PointNet的详…

AutoCV第九课:ML基础
目录 矩阵运算前言1. 矩阵乘法和求导总结 矩阵运算
前言 手写AI推出的全新保姆级从零手写自动驾驶CV课程,链接。记录下个人学习笔记,仅供自己参考。 本次课程主要学习矩阵运算的基础,考虑使用矩阵来表达多个线性回归模型。 课程大纲可看下面…
![[原创] NDT (ndt_omp) 算法及源码解析(二)](https://img-blog.csdnimg.cn/c7f7495fd5254745897ad55d529a64ea.png)
[原创] NDT (ndt_omp) 算法及源码解析(二)
[原创] NDT (ndt_omp) 算法及源码解析(二)
最近笔者的实习面试遇到全线溃败,深深感到自身的基础理论水平薄弱。知耻而后勇,面试中反映出的问题应该及时补救。因此,笔者最近阅读了经典的NDT算法文章,以巩固…
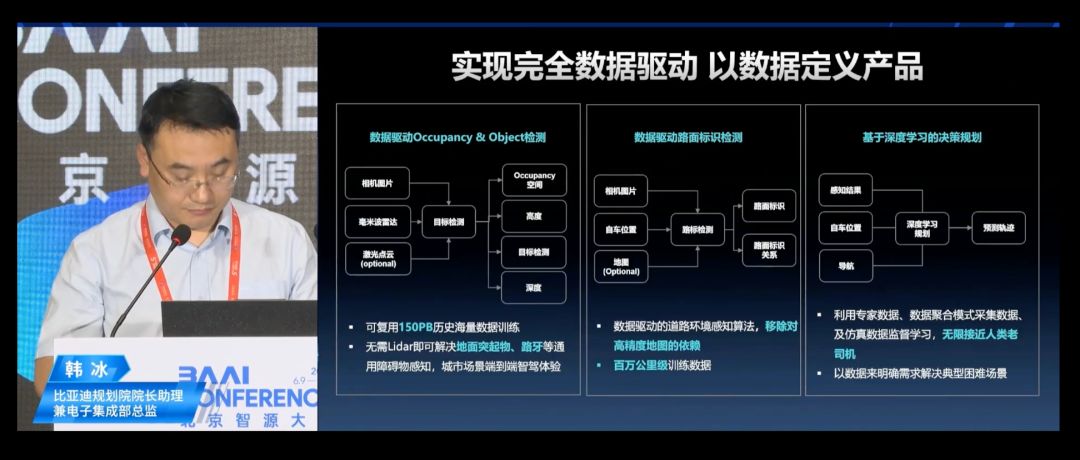
比亚迪首谈智驾进展:年内量产大算力域控,感知大模型上车
作者 |
马波 编辑 |
德新 前不久,HiEV独家报道了比亚迪在智能驾驶领域的最新量产计划 。 比亚迪将会在今年第三季度,落地基于地平线征程5的高阶智驾方案,首项高阶智驾功能为高速导航辅助驾驶DNP,首发车型大概率是汉。 王传福曾…

三维点云处理06-2D/3DIoU计算
三维点云处理06-2D/3DIoU计算 IoU定义:预测边框与真是边框的交集与并集之比首先说明IoU的计算并不需要像下图所示对各种情况进行分类后,再进行计算 IoU的计算本质上是集合交集的计算,首先从一维IoU的计算开始,然后扩展到二维等等 …
GSR II 驾驶员疲劳和注意力警告系统DDAM(DMS)的具体测试流程和技术要求
补充欧洲议会和欧洲理事会第2019/2144号条例,规定了机动车类型审批中有关驾驶员疲劳和注意力警告系统的具体测试流程和技术要求的详细规则,并修订该条例的附件二 (1) (欧盟)2019/2144号条例第6条要求M类和N类机动车必须配备某些先进的车辆系统,包括驾驶员疲劳和注意力警告(D…
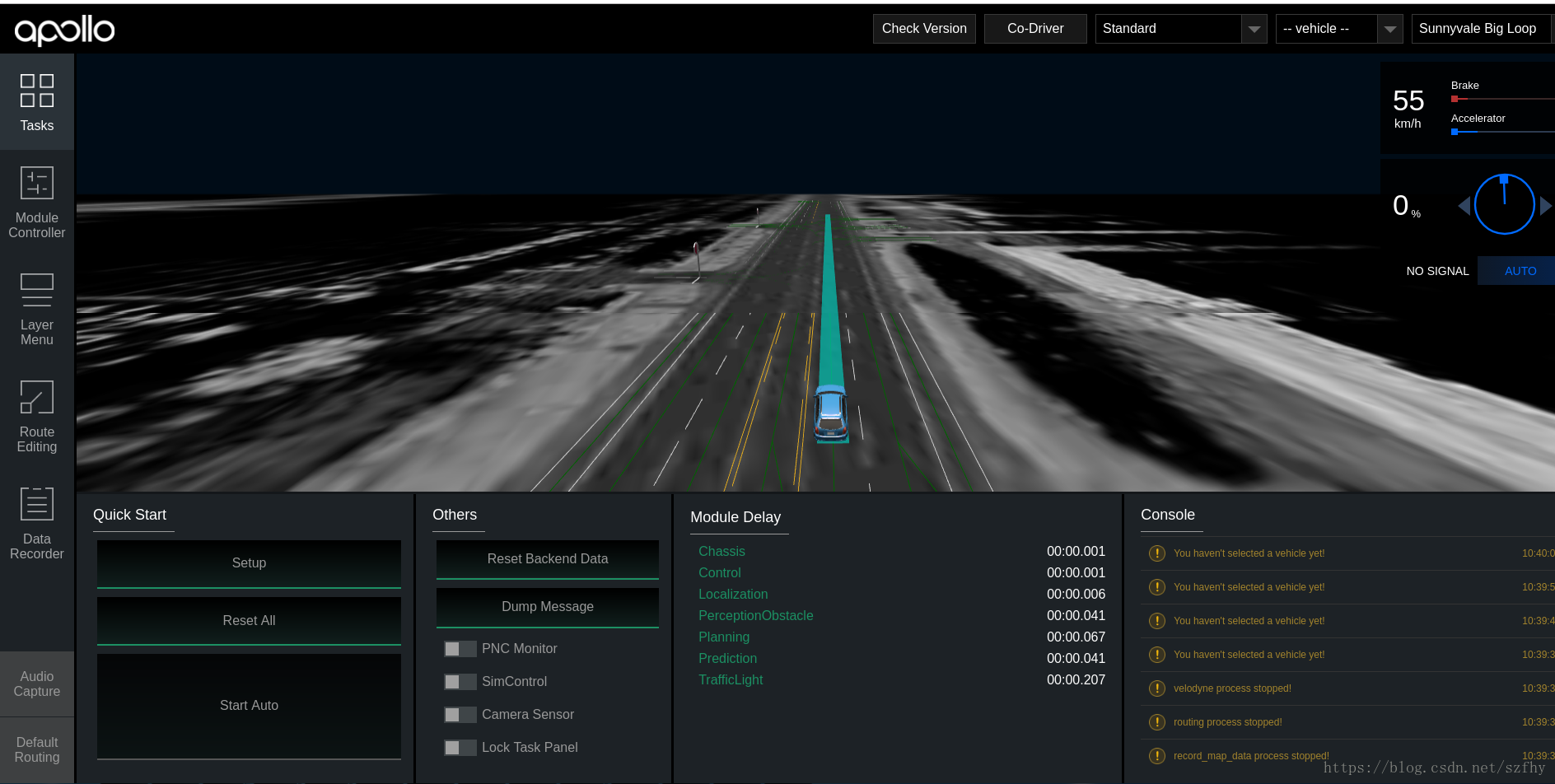
从零开始学Apollo自动驾驶:跑起来第一个Demo
围绕着百度开源的Apollo自动驾驶项目展开,重点分析整个项目的框架,核心的计算机视觉感知模块。
下载项目代码
项目主页:https://github.com/ApolloAuto/apollo
git clone https://github.com/ApolloAuto/apollo.git
或者直接Download Zip …
实现自动驾驶的难点有哪些?
摘要:
这里主要介绍了传感器融合(SF)对目标方面的几类任务,除目标之外,传感器融合还能做很多其他对环境建模的任务,例如道路特征的描述、占用栅格地图以及可通行区域表示等等。 从车道保持到高阶自动驾驶功…
如何发现飞行数据中可能存在的数据不协调问题
如何发现飞行数据中可能存在的数据不协调问题 将量测的一个子集代入状态方程,并求解状态方程,再根据量测方程重建量测的其它子集。如果所有的量测数据都是协调的,那么重建的输出和传感器测量到的输出除了存在随机测量误差外,将匹配…
什么是数据协调性分析
目录什么是数据协调性分析什么是数据协调性分析 如果传感器测量到的飞行数据(如线加速度、速度、位置、角加速度,角速度、欧拉角)是完美的,则这些测量数据必定能很好地满足由运动学方程给出的关系。但在工程实践中,每种传感器都或多或少地存在…

agg::path_storage 路径存储器
7.1内置函数参数说明以及分析path storage是用来管理路径、画复杂图形的。在上面可以任意添加直线、曲线、其他路径。 头文件#include <agg_path_storage.h> 类型定义typedef path_base<vertex_block_storage<double> > path_storage; 基本成员函数move_t…

缓和曲线——回旋曲线的计算
回旋曲线的计算
下午打算计算验证一下回旋曲线公式,想偷个懒从网上down个代码对比验证,但未检索到现成代码。关于回旋曲线离散点(x,y)的计算分析众多,但介绍并不详细,甚至公式和计算方法也都不同。为不枉费…

如何在python3中安装第三方库(例:jieba库)
亲测有效,不用下载任何压缩包!!! 首先打开菜单栏输入cmd,单击进入,如图1; 进入后,不需要进行任何操作,就开着就行,如图2; 图1(如上图…
2021年道路运输企业主要负责人及道路运输企业主要负责人复审模拟考试
题库来源:安全生产模拟考试一点通公众号小程序
安全生产模拟考试一点通:道路运输企业主要负责人考前必练!安全生产模拟考试一点通每个月更新道路运输企业主要负责人复审模拟考试题目及答案!多做几遍,其实通过道路运输…
自动驾驶感知算法实战11——多传感器融合感知方案详解
自动驾驶感知算法实战专栏:https://blog.csdn.net/charmve/category_12097938.html目录 1 何为多传感器融合?2 多传感器融合的优势3. 多传感器融合的先决条件3.1 统一时钟3.2 统一坐标系4. 多传感器融合算法分类4.1 后端融合算法4.2 前端融合算法5. 总结在自动驾驶的感知领域…
Al+行业正在聚焦多元化的应用场景 为人工智能发展提供巨大空间
人工智能专用芯片与智能传感器的发展,大幅提高了端侧设备的计算资源容量。同时,模型压缩后的人工智能算法支持轻量化和低成本化部署。 终端设备开始内置嵌入深度学习算法,可以对采集的数据进行实时处理实时应用。边缘层作为智能终端最近的…

yolov5+车道线检测
目标检测与车道线检测在自动驾驶以及车辆定位中起着重要的辅助作用,是环境感知中不可缺少的一个部分。基于深度学习的车道线检测方法近年来也在不断的提升,比如论文:Ultra Fast Deep Lane Detection with HybridAnchor Driven Ordinal Classi…
(01)ORB-SLAM2源码无死角解析-(05) Tracking::Tracking()与 Frame::Frame()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
V-Box智能车载终端-OBUYZN2
1 产品概览 OBUYZN2型智能车载终端(以下简称)是 型智能车载终端(以下简称)是 型智能车载终端(以下简称)是 型智能车载终端(以下简称)是 组成智能网联 系统 的核心数据交互设备 &…
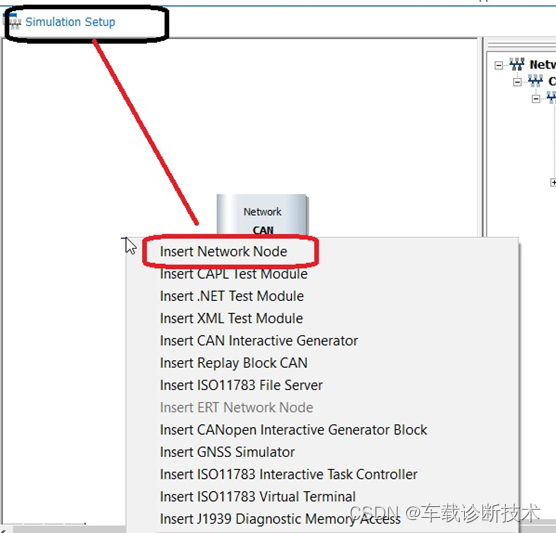
电子电气架构——基于CANoe实现两路CAN线间网关仿真
基于CANoe实现两路CAN线间网关仿真
魔都的天气也很魔性,白天酷热无比,现在晚上九点又狂风大作,凉爽宜人。 天气的不可预见性与个人生活极其相似,都有随机、不可控的成分,自己能做的就是不懊悔昨天已发生,不寄托于未来未发生,只想过好当下这时光。
老规矩,分享一段喜…
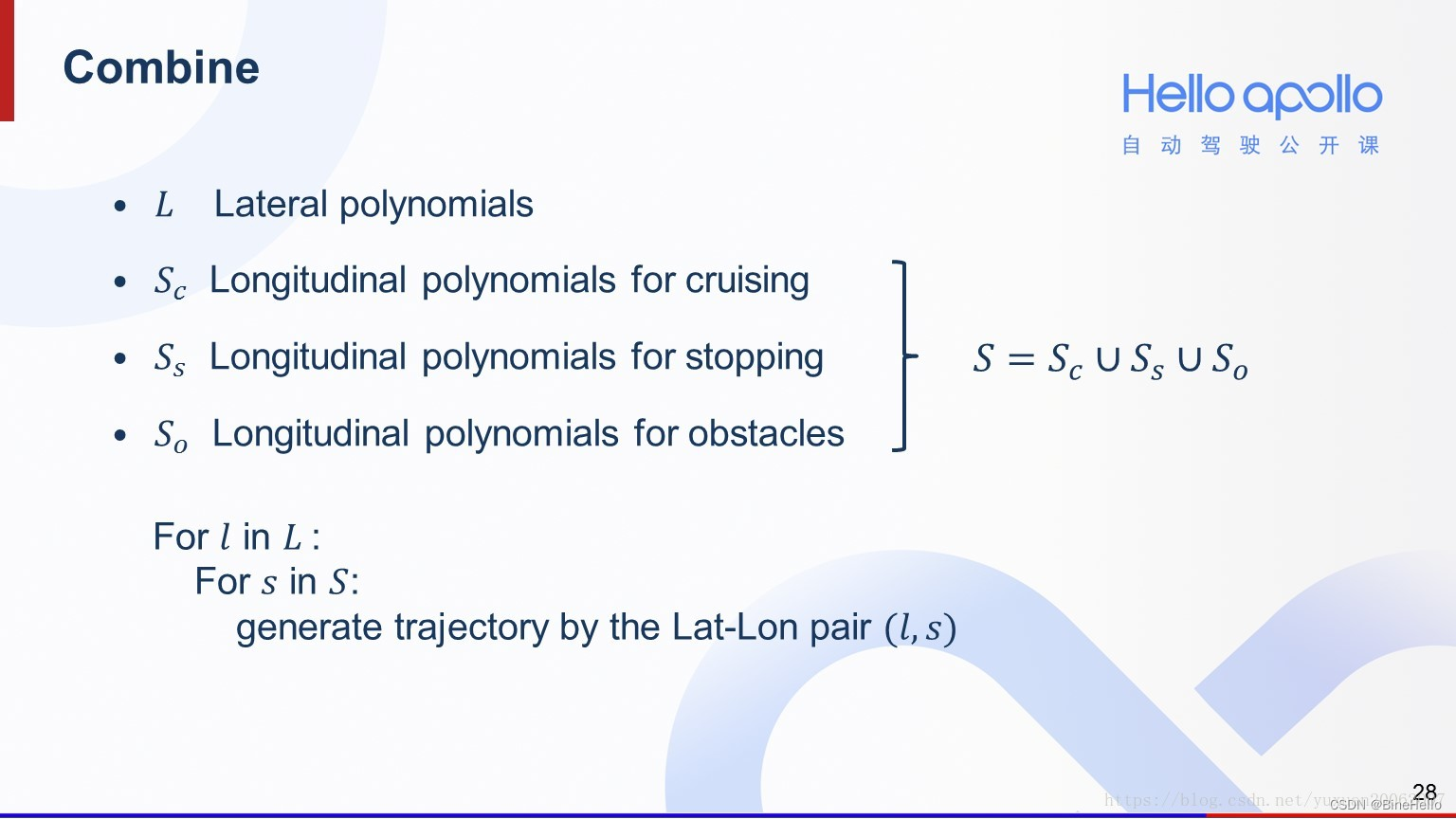
自动驾驶规划 - Apollo Lattice Planner算法【1】
文章目录Lattice Planner简介Lattice Planner 算法思路1. 离散化参考线的点2. 在参考线上计算匹配点3. 根据匹配点,计算Frenet坐标系的S-L值4. parse the decision and get the planning target5. 生成横纵向采样路径6. 轨迹cost值计算,进行碰撞检测7. 优…
【论文解读】地空双模式车辆的自主自适应导航
标题:Autonomous and Adaptive Navigation for Terrestrial-Aerial Bimodal Vehicles 作者:Ruibin Zhang, Yuze Wu, Lixian Zhang, Chao Xu, and Fei Gao 来源:https://arxiv.org/pdf/2109.04706.pdf 代码:https://github.com/ZJU-FAST-Lab/Terrestrial-Aerial-Navigation …
路径规划 | 图解LPA*算法(附ROS C++/Python/Matlab仿真)
目录0 专栏介绍1 什么是LPA*算法?2 LPA*算法核心概念一览3 LPA*算法流程4 步步图解:算法实例5 算法仿真与实现5.1 ROS C实现5.2 Python实现0 专栏介绍
🔥附C/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备࿰…

驶向未来:机器学习如何实现自动驾驶汽车的安全与可靠性
自动驾驶汽车是人工智能和机器学习的重要应用之一。机器学习可以帮助自动驾驶汽车预测交通状况,识别道路标志和车辆,规划最佳路径,以及避免交通事故等。在本文中,我们将讨论机器学习如何应用于自动驾驶汽车,以及它对未…
华为车BU感知定位笔试题
智驾校招/社招 笔试题-感知定位
28个单选,只记得部分题目:
1.不属于光流法特点的是:需要小运动,光照敏感,计算速度慢 很多错误的匹配
2.姿态插值哪个精度更高 四元数 旋转矩阵 欧拉角 旋转向量
3.cv::mat 内部存…

在ROS2运行urdf_tutorial例程
文章目录前言一、安装依赖库二、下载源代码三、编译源代码四、运行urdf_tutorial功能包例程五、参考文献前言
在参考ROS2的官方教程学习urdf时,运行urdf_tutorial的例程很容易会因为一些依赖的库没有安装遇到问题,这里记录一下我踩坑之后总结的过程。
…

Innovus中timing eco后setup margin跑哪里去了?(知识星球福利活动)
Innovus中timing eco后setup margin跑哪里去了?(知识星球福利活动) 文章右侧广告为官方硬广告,与吾爱IC社区无关,用户勿点。点击进去后出现任何损失与社区无关。 之前小编承诺知识星球每年会做1-2 次 的优惠活动(中秋节和春节)&a…
酞菁铅(PbPc),CAS:15187-16-3,PHTHALOCYANINELEAD齐岳定制酞菁材料
酞菁铅(PbPc),CAS:15187-16-3,PHTHALOCYANINELEAD齐岳定制酞菁材料
中文名称:酞菁铅
中文同义词:酞菁铅;酞菁铅5G;酞菁铅(II);酞菁铅(II)(升华提纯);酞菁铅(II)酞菁铅盐;PBPC酞菁铅;酞菁铅盐;LEAD(II)PHTHALOCYANINE酞菁铅(II)英文名称:PHTHALOCYANINE…

Ubuntu20.04--Apollo6.0环境配置与安装
本人硬件环境:
CPU:Intel Core i7 6700
GPU:NVIDIA GTX 1060 6G
内存:SAMSUNG DDR4 32GB
硬盘:双SSD 256G,双系统(windows,ubuntu)
注意,下面除标题,跟前面加&#…
使用nav2djs案例心得总结之_第19篇跑通导航实现
目录
简介
一、启动仿真
二、启动rosbridge 接口
三、创建HTML脚本
四、运行测试 简介 本节主要学习研究nav2djs包测试导航的功能实现,该功能类似rviz中的2D Nav Goal功

Ubuntu16.04 搭建自动驾驶环境autoware全过程及遇到的问题
配置autoware必须安装的库:
pip install kvasersudo apt-get install -y python3-colcon-common-extensionspip install canlibsudo apt-get install ros-kinetic-velodynesudo apt-get install ros-kinetic-pcl_conversionssudo apt-get install ros-kinetic-vis…

最简单DIY基于ESP8266的物联网智能小车①(webserver服务器网页简单遥控版)
ESP8266和ESP32物联网智能小车开发系列文章目录
第一篇:最简单DIY基于ESP8266的物联网智能小车①(webserver服务器网页简单遥控版) 文章目录ESP8266和ESP32物联网智能小车开发系列文章目录前言一、最简单DIY基于ESP8266的物联网智能小车①&a…

Jeston与PX4(二)
PX4和QGC 文章目录PX4和QGC一、PX4Pixhawk的构造:二、Windows上的QGC安装及环境搭建1.安装git2、VS20173、Qt 5.12.64、下载qgc源码v4.0.05、Qt配置6、一些问题1)qt配置中c于c的版本不对2)编译过程报错非C22203)QGC编译报错error …
【视觉SLAM入门】9.1 建图1---SLAM任务,稠密地图构建,立体视觉,RGBD,八叉树,点云地图等各种不同地图
"讷为君子,寡为吉人 ” 1. 立体稠密地图1.1 地图构建1.2 分析立体相机稠密建图效果 2. RGB-D稠密地图2.1 地图对比2.1.1 八叉树地图 3. 建图?定位?孰轻孰重3.1 鬼影问题3.2 三维重建 4. 总结 SLAM的功能: 直到现在我们可以知…
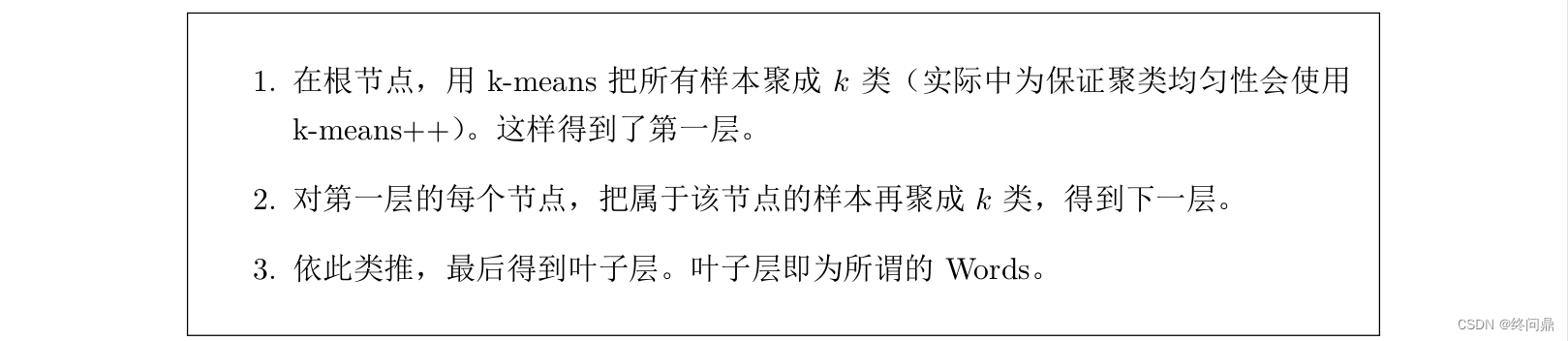
【视觉SLAM入门】8. 回环检测,词袋模型,字典,感知,召回,机器学习
"见人细过 掩匿盖覆” 1. 意义2. 做法2.1 词袋模型和字典2.1.2 感知偏差和感知变异2.1.2 词袋2.1.3 字典 2.2 匹配(相似度)计算 3. 提升 前言: 前端提取数据,后端优化数据,但误差会累计,需要回环检测构建全局一致的地图&…
GIS前沿:GIS是5G网络的关键,GIS如何影响5G?
第五代移动网络(5G)将促进互联互通,并带来许多新的技术进步,因此它成为当前的技术流行语也就不足为奇了。很多人意识到,当网络变得广泛时,很多情况会发生变化,但很少有人意识到它是如何与GIS技术…
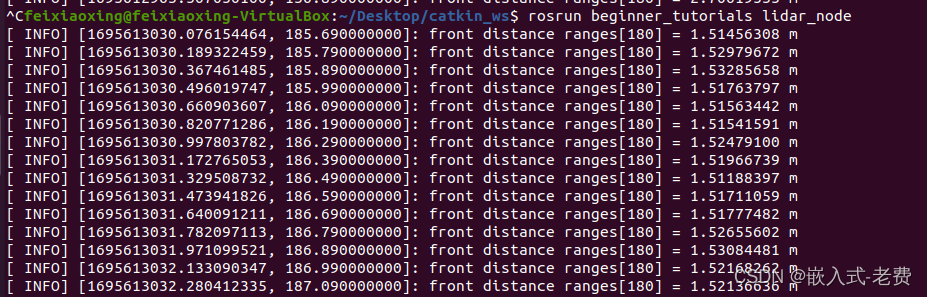
SLAM从入门到精通(lidar数据的采集)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing 163.com】 lidar是机器人用的比较多的一种传感器。从前可能单线lidar用的比较多,现在多线lidar则开始慢慢崛起了。这里面最主要的原因还是价格。之…
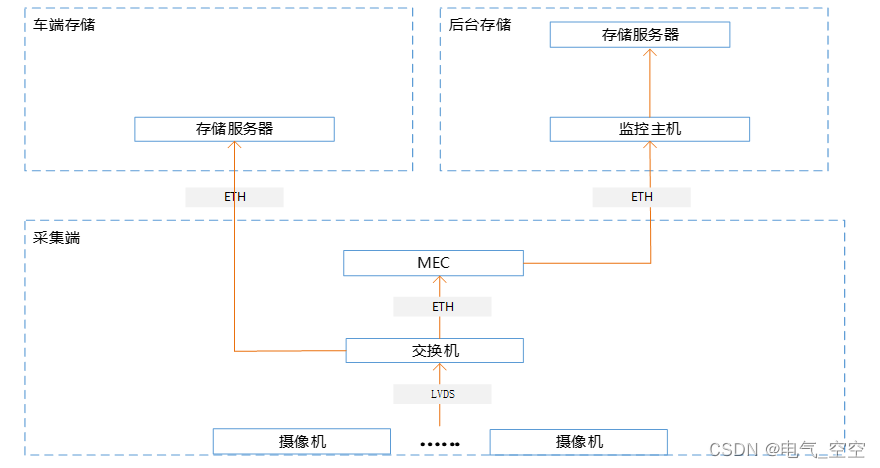
自动驾驶港口车辆故障及事故处理机制
1、传感器故障:
(1)单一传感器数据异常处理。自动驾驶电动平板传感方案为冗余设置,有其他传感器能够覆盖故障传感器观测区域,感知/定位模块将数据异常情况发给到规划决策模块,由“大脑”向中控平台上报故障…
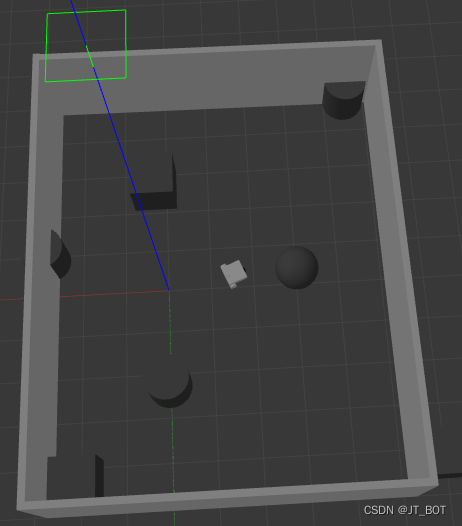
gazebo仿真ros2两轮差速小车没有控制的情况下缓慢移动后退
最近在做一款2轮差速的机器人小车,在做gazebo仿真的时候,发现小车一直在缓慢的后退,一边后退一边缓慢拐弯。
环境:ros2 foxy gazebo-11
小车xacro模型代码
<?xml version"1.0"?>
<robot name"jtb…
Ros noetic Move_base 相关状态位置的获取 实战使用教程
前言: 有一段时间没有更新,这篇文章是为了后续MPC路径跟踪算法开设的帖子用于更新我自己的思路,由于MPC算法,要镶嵌到整个导航任务中去,就绕不开这个move_base包中相关的参数设置和其中相关状态位置的获取和解读等等。 因为最近遇到小车在其他的环境中有些时候,不需要自己…
百度Apollo:引领自动驾驶技术的创新与突破
文章目录 前言一、技术创新二、开放合作三、生态建设四、安全可靠性总结 前言
随着科技的迅猛发展,自动驾驶技术正成为未来交通领域的重要发展方向。在这个领域中,百度Apollo作为中国领先的自动驾驶平台,以其卓越的创新能力和开放合作精神&a…
驾驶员监控系统DMS系统功能规范
概述 文档范围
该文档阐述了DMS系统的功能场景、系统组成、接口需求等。 目的
该功能规范为DMS系统及周边件的开发提供参考。 缩写与定义 英文缩写 英文全称 中文描述 DMS: Driver Monitoring System 驾驶员监控系统 MPU: Micro Processor Unit 微处理器单元 IECU: …
哪些自主品牌「霸榜」30万元向上战场?硬派越野/MPV再助力
占乘用车市场不到20%份额的30万元以上价位,一直以来都是合资品牌的天下。现在,三家中国本土自主品牌已经率先突围。
高工智能汽车研究院监测数据显示,2023年1-7月,理想、比亚迪、蔚来进入30万元以上价位新车交付量TOP10ÿ…

AI自动驾驶也“区分人种”?有色人种和儿童面临更高碰撞风险
8月27日消息,随着人工智能(AI)的快速发展,尤其是在自动驾驶汽车领域,这项技术给人类带来了巨大的便利。 然而,据最新的研究发现,自动驾驶汽车中的行人检测软件可能存在一些严重问题,…

《自动驾驶与机器人中的SLAM技术》之GNSS相关基础知识总结
简介
本篇基于对《自动驾驶与机器人中的SLAM技术》中的GNSS定位相关基础知识进行总结用于备忘
知识点整理 GNSS(全球卫星导航系统)定位原理 GNSS 通过测量自身与地球周围各卫星的距离来确定自身的位置 , 而与卫星的距离主要是通过测量时间间隔来确定的 GNSS与GPS的关系 GPS(…
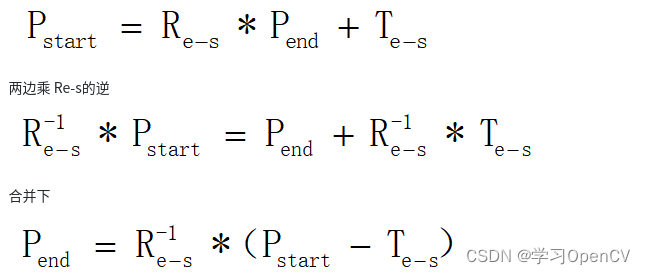
3d激光slam建图与定位(2)_aloam代码阅读
1.常用的几种loam算法 aloam 纯激光 lego_loam 纯激光 去除了地面 lio_sam imu激光紧耦合 lvi_sam 激光视觉 2.代码思路 2.1.特征点提取scanRegistration.cpp,这个文件的目的是为了根据曲率提取4种特征点和对当前点云进行预处理 输入是雷达点云话题 输出是 4种特征点…
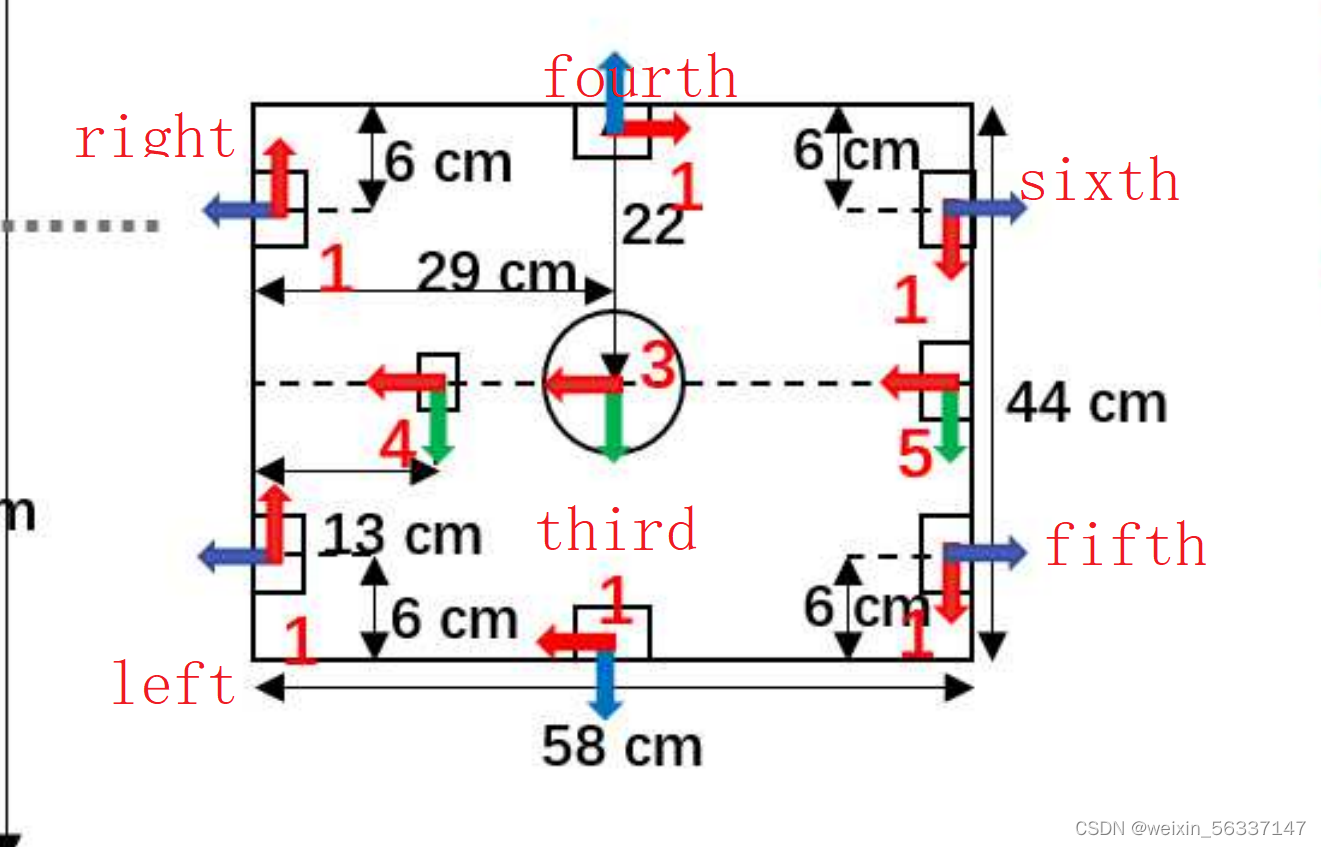
M2DGR数据集各相机话题名与外参名的对应关系
M2DGR数据集除了视觉惯性器件、天向相机,还有6个安装在同一平面、参数一致的鱼眼相机。
本文对这6个相机的安装位置、外参、topic话题进行区分。
安装图: 6个鱼眼相机 fish-eye camera装载在同一层。
外参情况
fish-eye camera在calibration_results…

EffificientDet: Scalable and Effificient Object Detection
动机:
Is it possible to build a scalable detection architecture with both higher accuracy and better efficiency across a wide spectrum of resource constraints (e.g., from 3B to 300B FLOPs)? 【CC】开门见山:基于不同的算力构建一族网络 …

NetVLAD: CNN architecture for weakly supervised place recognition
背景知识:
Vector of Locally Aggregated Descriptors(VLAD)image retrieval. 【CC】是广泛使用的图像提取方式,本文是在在这个提取器上做改进;具体是啥下面有介绍
weakly supervised ranking loss 【CC】本文的另外…

Real Time End-to-End 3D Detection, Tracking and Motion Forecasting with a Single Convolutional Net
动机
本文通过一个不深的网络搞定了3D的目标检测/跟踪/预测。采用BEV的方式进行表达。 猜测本文是MP3论文关于Perception部分的原型。 输入:4D张量(X,Y,Z,T) 输出:N张带预测的BEV图
备忘
This can result in catastrophic fail…

MP3- A Unified Model to Map Perceive Predict and Plan
简介
动机:HD map 更新不及时,还有因为定位问题导致HD 不靠谱,需要一种基于LIDAR的无HD MAP的解决方案 输入: 原始的LIDAR信息 (点云时间序列) Routing的指令(比如,turn right&…


ROS程序编译和没有编译一样,指执行的是旧的编译的可执行的程序
问题描述:ROS程序编译和没有编译一样,指执行的是旧的编译的可执行的程序,
查找
网上找到可执行文件说时在devel下面的share中,删除和功能包相同的文件夹,之后还是编译了但还是执行之前的程序,之后查看说时devel下面的…

Python机器学习之游戏自动驾驶(三)
3. 如何进行测试
在测试阶段关键在于如何通过python对电脑发出相应的按键操作,因为我们的目的是让神经网络根据游戏的画面给出对应的操作,要想给出对应的操作也需要用到最开始所说的win32包,下面给出发送按键操作指令的代码
import ctypes
…
9.7 校招 内推 面经
绿泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、校招 | Momenta 2024校招火热进行中!新增招聘岗位(内推)
校招 | Momenta 2024校招火热进行中!新增招聘岗位(内推) 2、…
Python机器学习之游戏自动驾驶(二)
2. 如何训练网络
上一篇我们讲解了如何获取训练数据,这一篇文章讲解如何用Pytorch搭建网络并进行训练。
对了在上一篇文章中有一个重要的内容忘记说了,那就是在获取了原始数据之后我对数据进行了一些处理,那就是把所有三种操作数据的数量进…
SLAM中的三角化方案
Linear triangulation methods 又称为线性三角形法,其作用是通过同一个三维空间点在两个视图中的平面坐标(也可以认为是像素坐标),求解这个三维空间点的世界坐标。通常的求解方式有两种,一种是数值求解;一种…
(02)Cartographer源码无死角解析-(73) 2D后端优化→OptimizationProblem2D-landmark残差细节分析
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末正下方中心提供了本…

高速公路自动驾驶汽车超车控制方法研究
目录 摘要 ............................................................................................................ I Abstract ...................................................................................................... II 目录 ...............…
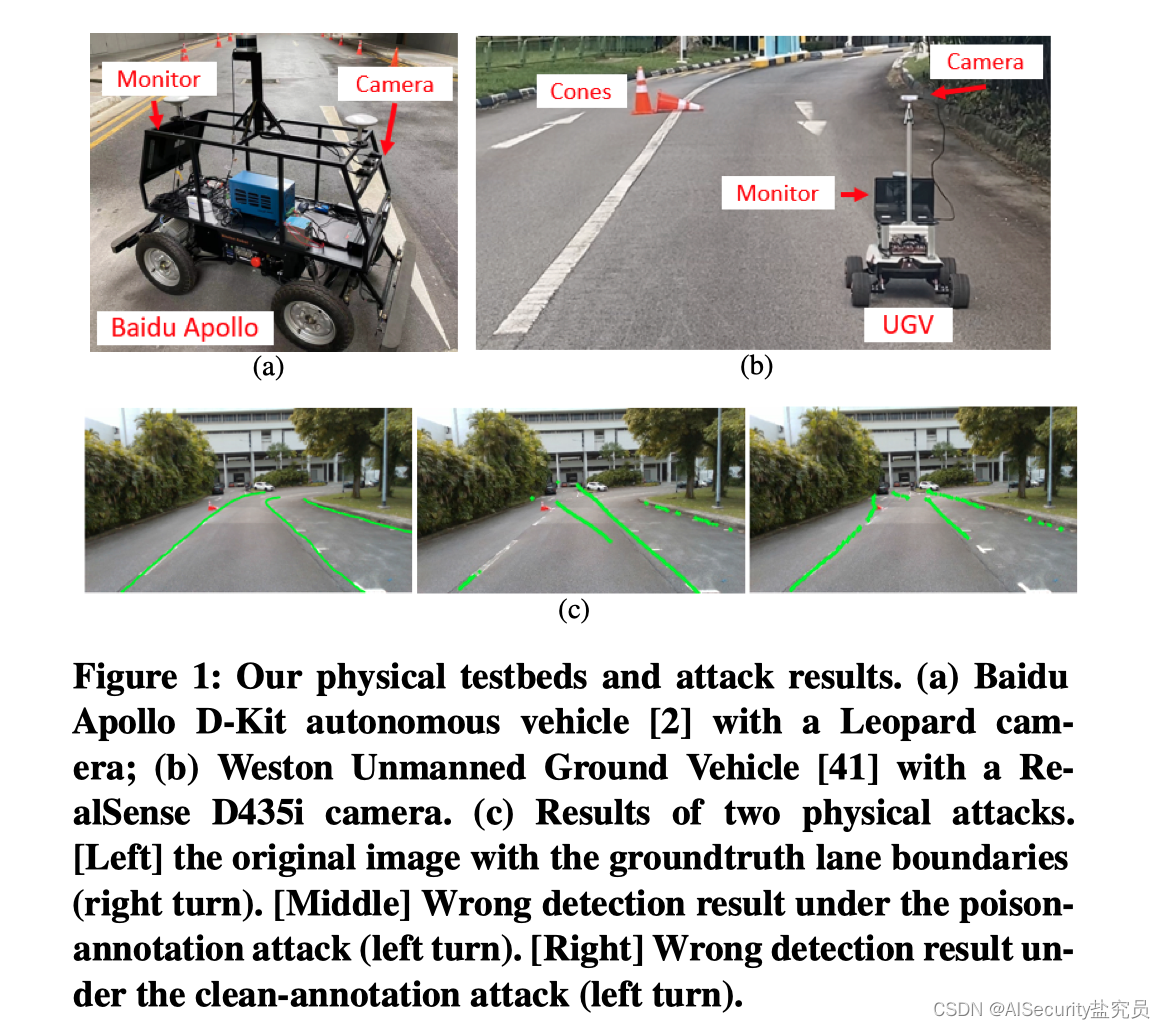
【论文阅读】自动驾驶中车道检测系统的物理后门攻击
文章目录 AbstractIntroduction 论文题目: Physical Backdoor Attacks to Lane Detection Systems in Autonomous Driving(自动驾驶中车道检测系统的物理后门攻击) 发表年份: 2022-MM(ACM International Conference on…

【Apollo学习笔记】——规划模块TASK之RULE_BASED_STOP_DECIDER
文章目录 前言RULE_BASED_STOP_DECIDER相关配置RULE_BASED_STOP_DECIDER总体流程StopOnSidePassCheckClearDoneCheckSidePassStopIsPerceptionBlockedIsClearToChangeLaneCheckSidePassStopBuildStopDecisionELSE:涉及到的一些其他函数NormalizeAngleSelfRotate CheckLaneChang…
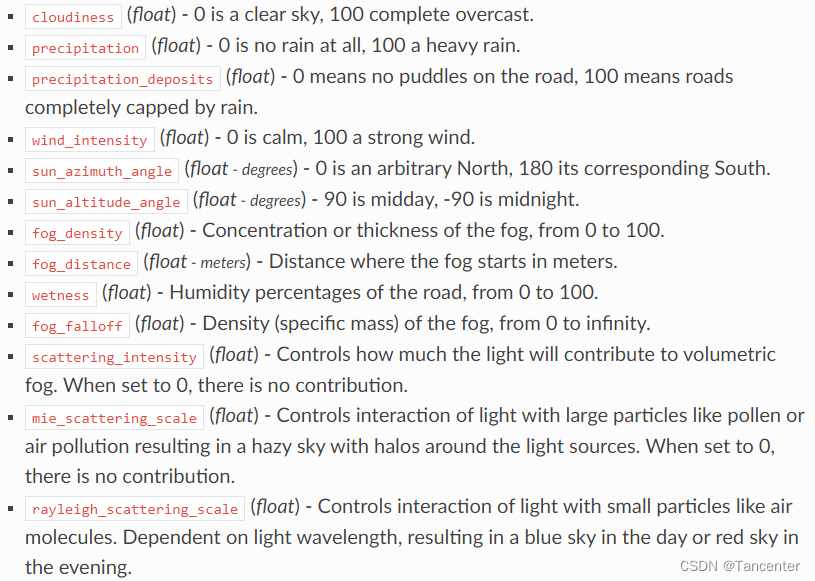
Configurable Weather Parameters
1. Weather Parameters 2. Classification
ClearNoon, CloudyNoon, WetNoon, WetCloudyNoon, SoftRainNoon, MidRainyNoon, HardRainNoon, ClearSunset, CloudySunset, WetSunset, WetCloudySunset, SoftRainSunset, MidRainSunset, HardRainSunset
to do list: 可以关注一下…
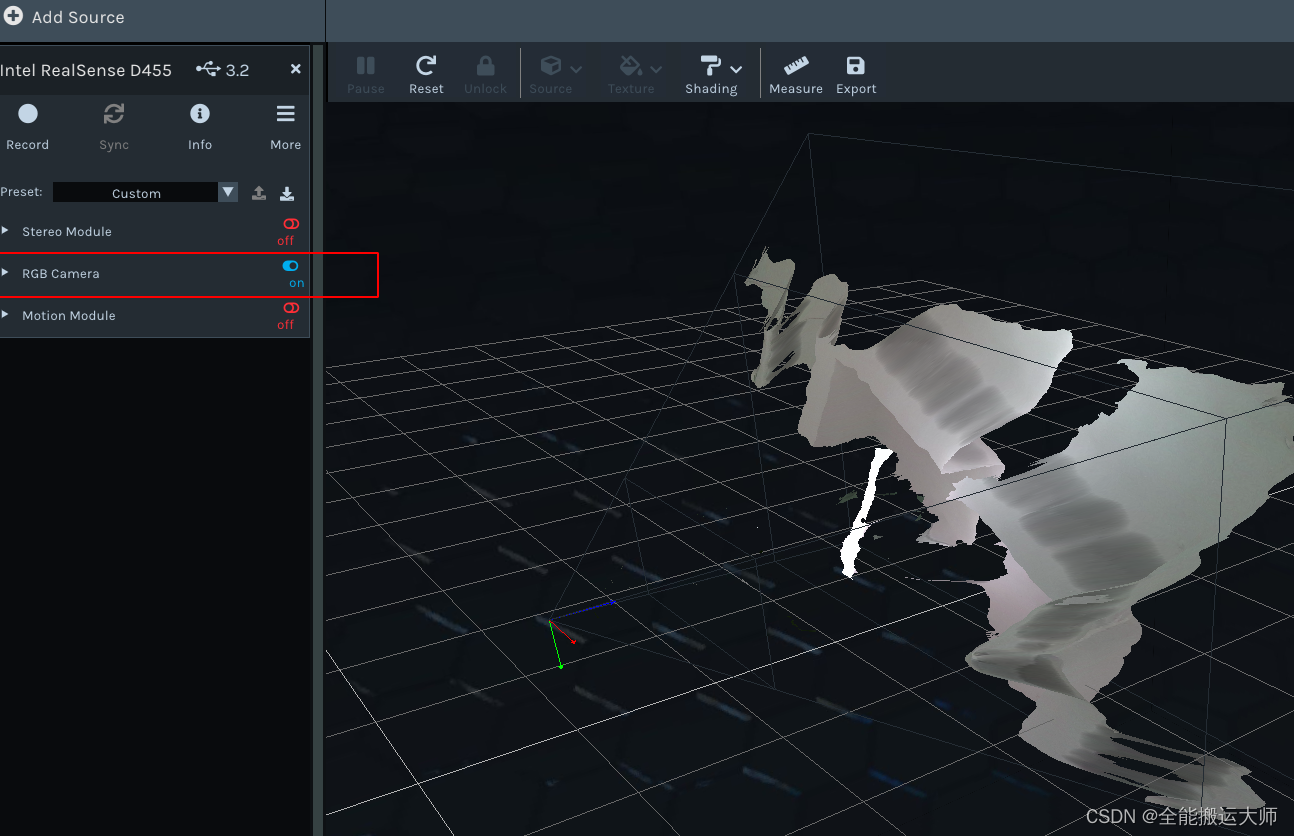
RealSense D455启动教程
环境:
ubuntu20.04 ros:noetic 视觉传感器:Intel RealSense D455
通过命令安装不成功后改为下面源码安装
1. 安装Intel RealSense SDK 2.0 1.1源码安装
1. 下载源码git clone https://github.com/IntelRealSense/librealsense
cd librealsense…
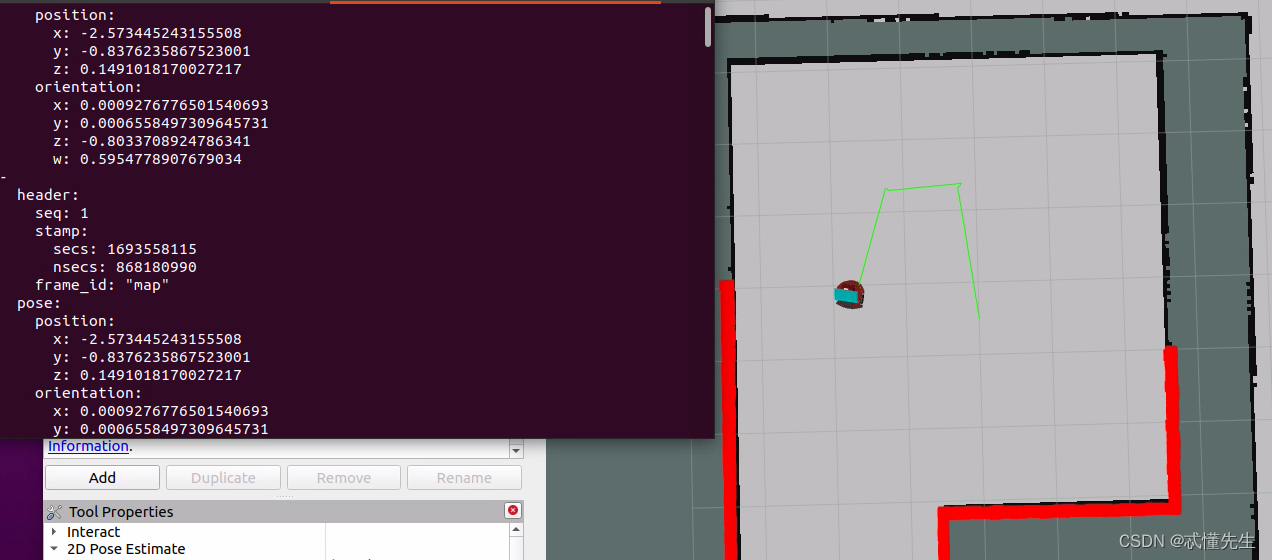
Ros noetic 机器人坐标记录运动路径和发布 实战教程(A)
前言: 网上记录Path的写入文件看了一下还挺多的,有用yaml作为载体文件,也有用csv文件的路径信息,也有用txt来记录当前生成的路径信息,载体不重要,反正都是记录的方式,本文主要按yaml的方式写入,后文中将补全其余两种方式。 其中两种方式的主要区别在于,加载yaml所需要…
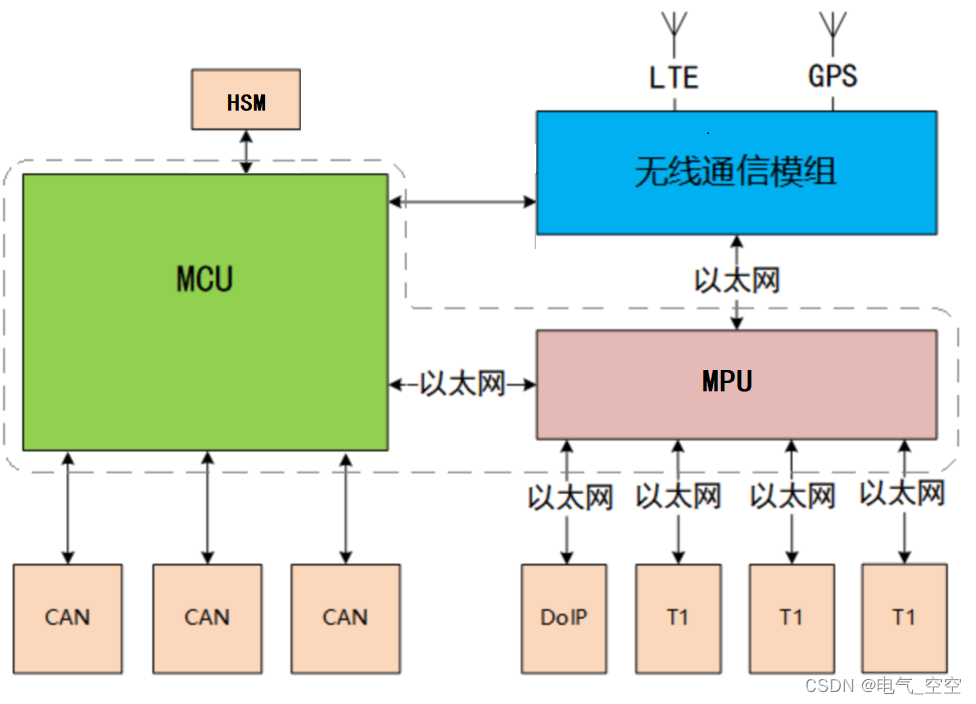
TBOX开发需求说明
TBOX功能需求:
支持4G上网功能,可获取外网IP,可和云端平台连通支持路由功能,支持计算平台、网关和云端平台建立网络连接支持USB转网口,智能座舱会通过USB连接AG35建立网络连接(类似IVI通过USB口连接TBOX&a…

【Apollo学习笔记】——规划模块TASK之SPEED_HEURISTIC_OPTIMIZER
文章目录 前言SPEED_BOUNDS_PRIORI_DECIDER功能简介SPEED_BOUNDS_PRIORI_DECIDER相关配置SPEED_BOUNDS_PRIORI_DECIDER流程1. 对路程和时间进行采样以及速度限制2. 设计状态转移方程(cost计算)2.0 CalculateCostAt代价计算2.1 GetObstacleCost障碍物cost…
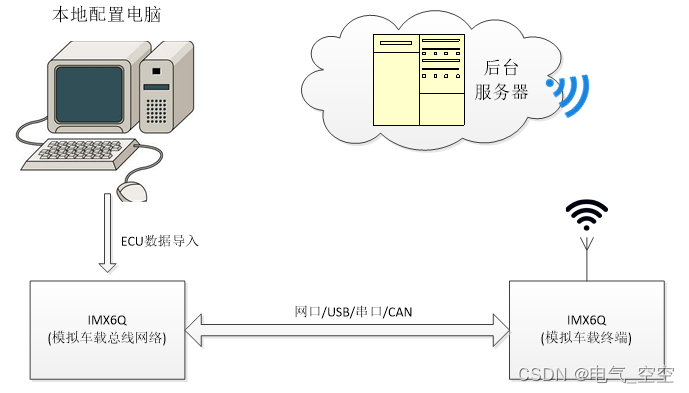

Jetson AGX Xavier 刷机指南
目录
一、刷机准备 二、JetPack4.5刷机过程 三、安装Cudnn 四、开启高性能模式 五、打开风扇 六、上电自启 七、设置开机自启动
一、刷机准备
在刷机之前,需要准备一台装有Ubuntu系统的宿主电脑。将 Xavier 连接电源,先不开机,通过自带的一…

ROS机器人编程---------(一)安装ROS
安装ROS
打开终端按顺序执行下面命令 默认安装在/opt/ros路径下 打开一个终端输入roscore 测试是否安装成功
启动ROS Master
roscore启动小海龟仿真器
rosrun turtlesim turtlesim_node启动海龟控制结点
rosrun turtlesim turtlesim_teleop_key使用键盘方向键控…
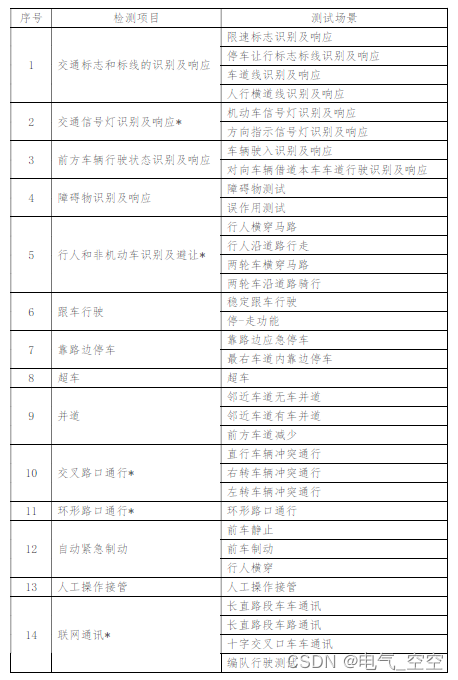
《智能网联汽车自动驾驶功能测试规程》
一、 编制背景 2018 年4 月12 日,工业和信息化部、公安部、交通运输部联合发布《智能网联汽车道路测试管理规范(试行)》(以下简称《管理规范》),对智能网联汽车道路测试申请、审核、管理以及测试主体、测试驾驶人和测试车辆要求等…
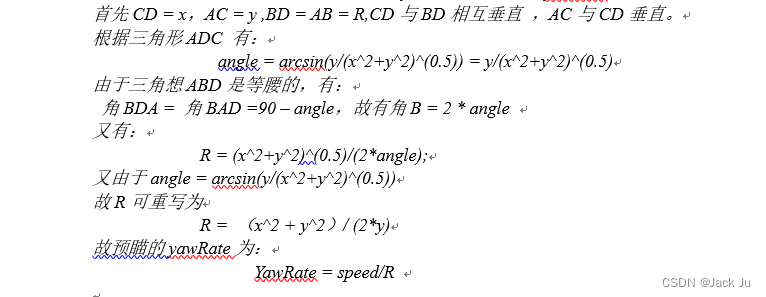
自动驾驶——估计预瞄轨迹YawRate
1.Introduction
在ADAS控制系统中,通常根据预瞄距离x去估计横向距离y,有如下关系: y a0 a1 x a2 * x^2 a3 * x^3 ,那么现在有个需求,希望根据上述x和y的关系,去估计规划预瞄轨迹yawRate
2.How to es…
9.4 校招 内推 面经
绿泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、校招 | 航天科工二院2024校招
校招 | 航天科工二院2024校招 2、校招 | 中国航空无线电电子研究所2024届校招
校招 | 中国航空无线电电子研究所2024届校招 3、校招 | 南京841研究所2024届校…
vscode ros配置
【ROS】VSCODE ROS 配置方法(保姆级教程,总结了多篇)_ros vscode_晴明大大的博客-CSDN博客
Carla学习笔记(二)服务器跑carla,本地运行carla-ros-bridge并用rviz显示
一、服务器跑carla
详见Carla学习笔记(一)服务器跑carla本地显示窗口_Zero_979的博客-CSDN博客
只需要启动服务器端就行:
./CarlaUE4.sh -carla-rpc-port2000 -RenderOffScreen -graphicsadaper1
二、本地下载 carla-ros-bridge
官方库&…
激光雷达成「烫手山芋」?或成车企降本的牺牲品
对于激光雷达的争议,一直没有停止过。
近日,作为全球汽车零部件龙头,博世宣布,“考虑到技术复杂性和上市时间,将不会在激光雷达传感器的开发上投入更多资源。”
此外,从全球市场来看,目前除了…
9.6 校招 内推 面经
绿泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、校招 | 德州仪器2024秋季校园招聘全面启动(内推)
校招 | 德州仪器2024秋季校园招聘全面启动(内推) 2、校招 | 广汽集团2024校园招聘
校招 |…

【Apollo学习笔记】——规划模块TASK之PIECEWISE_JERK_NONLINEAR_SPEED_OPTIMIZER(一)
文章目录 TASK系列解析文章前言PIECEWISE_JERK_NONLINEAR_SPEED_OPTIMIZER功能介绍PIECEWISE_JERK_NONLINEAR_SPEED_OPTIMIZER相关配置PIECEWISE_JERK_NONLINEAR_SPEED_OPTIMIZER流程确定优化变量定义目标函数定义约束ProcessSetUpStatesAndBoundsOptimizeByQPCheckSpeedLimitF…

功能定义-前方交通穿行提示制动
功能概述 前方交通穿行提示(Front Cross Traffic Alert),简称FCTA,其功能表现为在车辆低速前进时,实时监测车辆前部横向接近的其他道路使用者,并在可能发生碰撞风险时发出警告信息
前方交通穿行制动(Front Cross Traffic Braking…
学习SLAM:SLAM进阶(九)以激光点云赋色为例讲述如何自定义ROS的消息格式并实现消息的订阅与发布
目录 1 为什么需要自定义的ROS消息格式
1.1 简介
1.2 ROS自定义消息格式的通用结构

【Apollo】Apollo的入门介绍
阿波罗是百度发布的名为“Apollo(阿波罗)”的向汽车行业及自动驾驶领域的合作伙伴提供的软件平台。 帮助汽车行业及自动驾驶领域的合作伙伴结合车辆和硬件系统,快速搭建一套属于自己的自动驾驶系统。 百度开放此项计划旨在建立一个以合作为中…

科技革新自动驾驶:拓世AI智能助理携手跟您一起点亮未来之旅
科技改变生活,智能改变世界,近年来,随着科技的不断进步,政策和市场的赋能推动,自动驾驶已经成为当今社会最炙手可热的话题之一。从其中的技术发展趋势来看,我国自动驾驶模式正由单车智能向车路协同时代演进…

自动驾驶之高精地图介绍
高精地图 文章目录 高精地图前言一、什么是高精地图 前言
一、什么是高精地图
高精地图(High Definitation Map,HD MAP),和普通导航电子地图的主要区别是精度更高、信息更丰富。精度更高主要体现在高精地图的绝对坐标精度更高(指的是地图上某个目标和外部的真实世…

【论文笔记】Perception, Planning, Control, and Coordination for Autonomous Vehicles
单纯作为阅读笔记,文章内容可能有些混乱。 文章目录 1. Introduction2. Perception3. Planning3.1. Autonomous Vehicle Planning Systems3.2. Mission Planning3.3. Behavioral Planning3.4. Motion Planning3.4.1. Combinatorial Planning3.4.2. Sampling-Based P…

【论文笔记】Baidu Apollo EM Motion Planner
文章目录 AbstractI. INTRODUCTIONA. Multilane StrategyB. Path-Speed Iterative AlgorithmC. Decisions and Traffic Regulations II. EM PLANNER FRAMEWORK WITH MULTILANE STRATEGYIII. EM PLANNER AT LANE LEVELA. SL and ST Mapping (E-step)B. M-Step DP PathC. M-Step …

LoGoNet:基于局部到全局跨模态融合的精确 3D 目标检测
论文地址:https://arxiv.org/abs/2303.03595 论文代码:https://github.com/sankin97/LoGoNet
论文背景
激光雷达传感器点云通常是稀疏的,无法提供足够的上下文来区分远处的区域,从而造成性能次优。
激光雷达-摄像机融合方法在三…
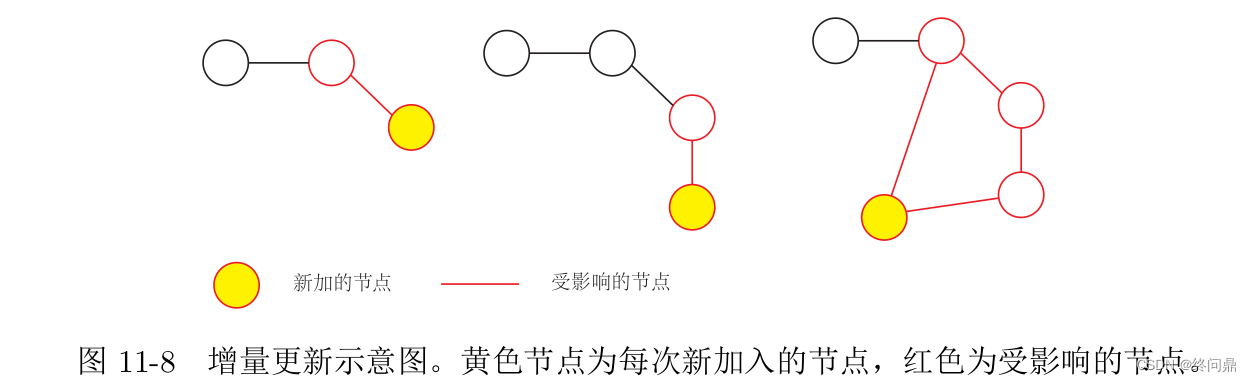
【视觉SLAM入门】7.4.后端优化 --- 基于位姿图和基于因子图
"议论平恕,无所向背” 1. 位姿图1.1 具体做法1.2 小结 2. 因子图2.1 具体做法2.1.1 贝叶斯网络2.1.2 因子图2.1.3 更具体的因子图2.1.4 增量的求解方法 引入:
上节BA将位姿和路标都作为优化的节点,H矩阵也告诉我们路标远大于位姿&#…

10英寸及以上占比超7成!车载大屏保持高增速,哪些供应商在领跑?
中控大屏「上车」继续保持高增速态势。
高工智能汽车研究院监测数据显示,今年1-7月中国市场(不含进出口)乘用车前装标配搭载10英寸及以上大屏(含多联屏)交付775.16万辆,同比去年同期增长38.19%。
同时&am…
闪光激光雷达实现无人驾驶导航
一艘宇宙飞船盘旋在灰色、布满陨石坑的月面上,扫描着它的着陆点,然后,在火箭的火焰中,扬起大量尘埃的火焰中,着陆器“墨菲斯”安全稳定地下降到一个空旷的地方。在布满碎石的岩石表面。
事实上,2014 年的这…

法规标准-UN R48标准解读
UN R48是做什么的?
UN R48全名为关于安装照明和灯光标志装置的车辆认证的统一规定,主要描述了对各类灯具的布置要求及性能要求;其中涉及自动驾驶功能的仅有6.25章节【后方碰撞预警信号】,因此本文仅对此章节进行解读
功能要求
…

功能定义-后方碰撞预警
功能概述 后方碰撞预警(Rear Collision Warning),简称RCW,其功能表现为实时监测车辆后方环境,并在可能受到后方碰撞危险时发出警告信息
报警区域 其中: L:表示后方盲区,受布置及传感器FOV影响 W࿱…

【AI视野·今日Robot 机器人论文速览 第四十二期】Wed, 27 Sep 2023
AI视野今日CS.Robotics 机器人学论文速览 Wed, 27 Sep 2023 Totally 48 papers 👉上期速览✈更多精彩请移步主页 Interesting:
📚***Tactile Estimation of Extrinsic Contact,基于触觉的外部接触估计与稳定放置 (from 三菱电机) Daily Robotics Pape…
ROS2 从头开始:第 4 部分 - 使用 ROS2 组合构建强大的机器人系统
一、说明 组件编程是软件规模庞大后,有限的程序个体不能满足系统的动态扩张的系统设计方案。组件编程的首要用途就是计算机操作系统。而ROS2也是操作系统,动态扩大或缩减是必然存在的,因此需要组件实现。 组件编程的其它参考资料: 【BOOST C++】组件编程(…
辅助驾驶功能开发-功能对标篇(9)-NOA领航辅助系统-北汽极狐
1.横向对标参数 厂商北汽极狐车型阿尔法S 华为HI版上市时间2022方案13V6R1L+1DMS摄像头前视摄像头4*(双目+长焦+广角)侧视摄像头4后视摄像头1环视摄像头4DMS摄像头1雷达毫米波雷达6*(前+后+四角)4D毫米波雷达/超声波雷达12激光雷达3*(华为96线,905nm)域控供应商1*(华为MDC810)辅…

【Apollo学习笔记】——规划模块TASK之SPEED_BOUNDS_PRIORI_DECIDERSPEED_BOUNDS_FINAL_DECIDER
文章目录 前言SPEED_BOUNDS_PRIORI_DECIDER功能简介SPEED_BOUNDS_FINAL_DECIDER功能简介SPEED_BOUNDS_PRIORI_DECIDER相关配置SPEED_BOUNDS_FINAL_DECIDER相关配置SPEED_BOUNDS_DECIDER流程将障碍物映射到ST图中ComputeSTBoundary(PathDecision* path_decision)ComputeSTBounda…
几种ubuntu下deb打包技术:checkinstall打包成deb,sh打包成可执行文件,以及添加依赖库,到打包到deb
1,checkinstall可以打包成deb,不够灵活,测试只会将本地的编译好的文件压缩成deb,并不会压缩关联的库,不推荐 参考链接:Ubuntu下制作deb包的方法详解 2.,可以打包成可执行文件 测试这个是可以导入库,但是导入的库不全 参考链接:在Linux下用sh打包发布基于opencv的C++可执…

Apollo自动驾驶系统概述(文末参与活动赠送百度周边)
前言 「作者主页」:雪碧有白泡泡 「个人网站」:雪碧的个人网站 「推荐专栏」: ★java一站式服务 ★ ★ React从入门到精通★ ★前端炫酷代码分享 ★ ★ 从0到英雄,vue成神之路★ ★ uniapp-从构建到提升★ ★ 从0到英雄ÿ…
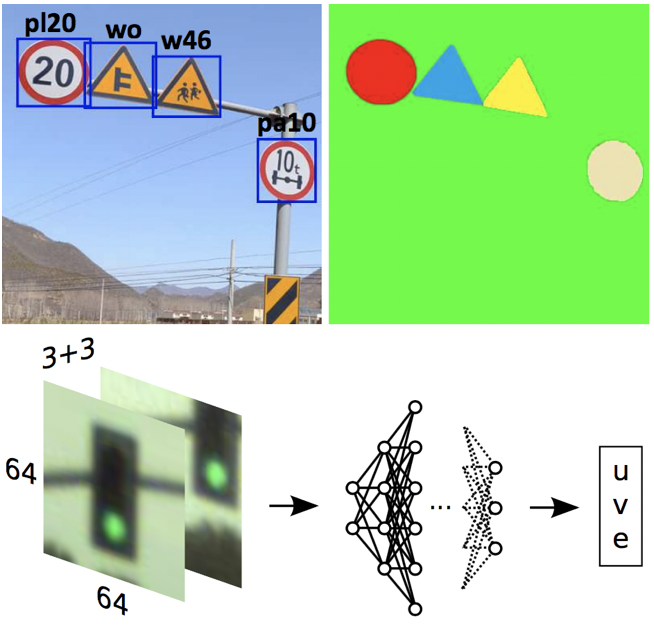
自动驾驶软件和人工智能
自动驾驶汽车的核心在于其软件系统,而其中的机器学习和深度学习技术是使车辆能够感知、理解、决策和行动的关键。本文将深入探讨这些技术在自动驾驶中的应用,包括感知、定位、路径规划以及道路标志和交通信号的识别。
1. 机器学习和深度学习在自动驾驶中…
【AI视野·今日Robot 机器人论文速览 第五十一期】Tue, 10 Oct 2023
AI视野今日CS.Robotics 机器人学论文速览 Tue, 10 Oct 2023 Totally 54 papers 👉上期速览✈更多精彩请移步主页 Daily Robotics Papers
On Multi-Fidelity Impedance Tuning for Human-Robot Cooperative Manipulation Authors Ethan Lau, Vaibhav Srivastava, Sh…
![[ROS2系列] ubuntu 20.04测试rtabmap](https://img-blog.csdnimg.cn/77a6a31b13b64910ac8441d3fd11e938.png)
[ROS2系列] ubuntu 20.04测试rtabmap
目录
背景:
一、配置 turtlebot3
二、安装RTAB-Map ROS2包:
三、启动 Turtlebot3 模拟器:
四、启动 RTAB 地图:
五、启动导航(nav2_bringup应安装软件包): 背景:
1、设备&…
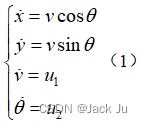
机器人控制算法——移动机器人横向控制最优控制LQR算法
1.Introduction LQR (外文名linear quadratic regulator)即线性二次型调节器,LQR可得到状态线性反馈的最优控制规律,易于构成闭环最优控制。LQR最优控制利用廉价成本可以使原系统达到较好的性能指标(事实也可以对不稳定的系统进行整定) ,而且方法简单便于实现 ,同时利用 Ma…
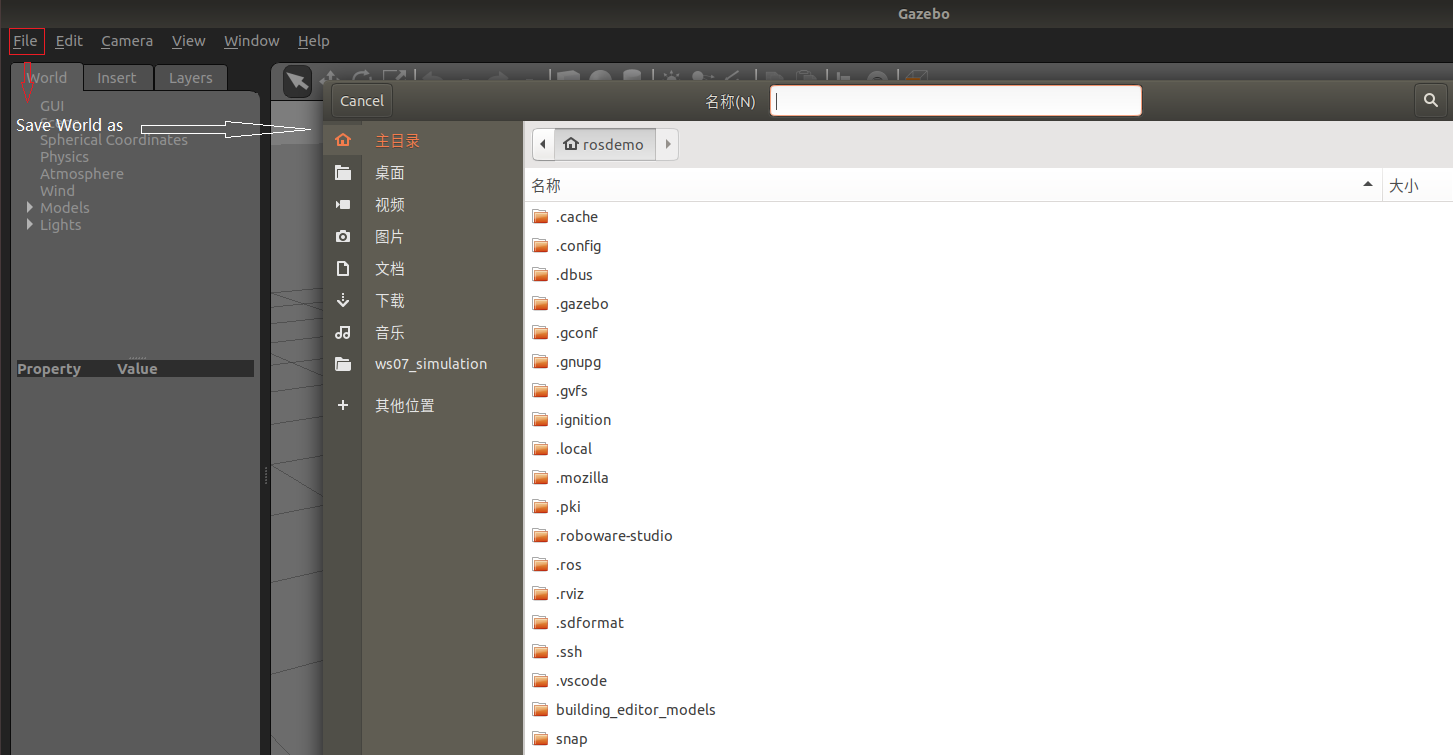
ROS自学笔记二十: Gazebo里面仿真环境搭建
Gazebo 中创建仿真实现方式有两种:1直接添加内置组件创建仿真环境2: 手动绘制仿真环境
1.添加内置组件创建仿真环境
1.1启动 Gazebo 并添加组件
1.2保存仿真环境
添加完毕后,选择 file ---> Save World as 选择保存路径(功能包下: worlds 目录),文…
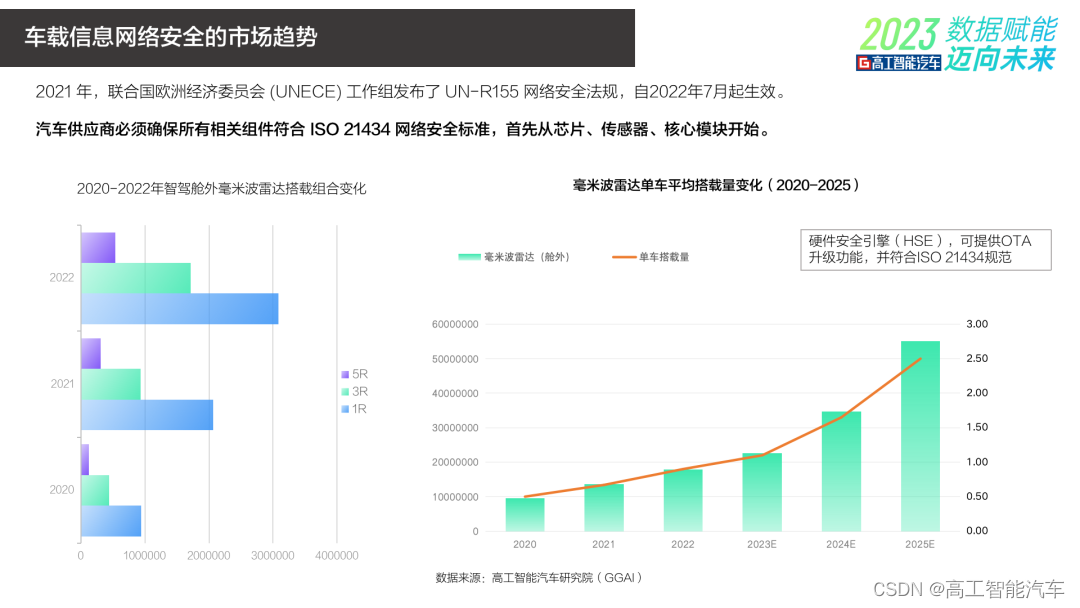
蓝皮书首发!车载毫米波雷达赛道进入「大变革周期」,技术/产品/市场并行升级
随着整车智能化进入普及周期,汽车制造商对传感器的需求正在激增,尤其是在辅助驾驶领域,不管是入门级L2,还是高阶NOA,毫米波雷达的单车搭载数量也在发生变化。
高工智能汽车研究院监测数据显示,2022年中国市…
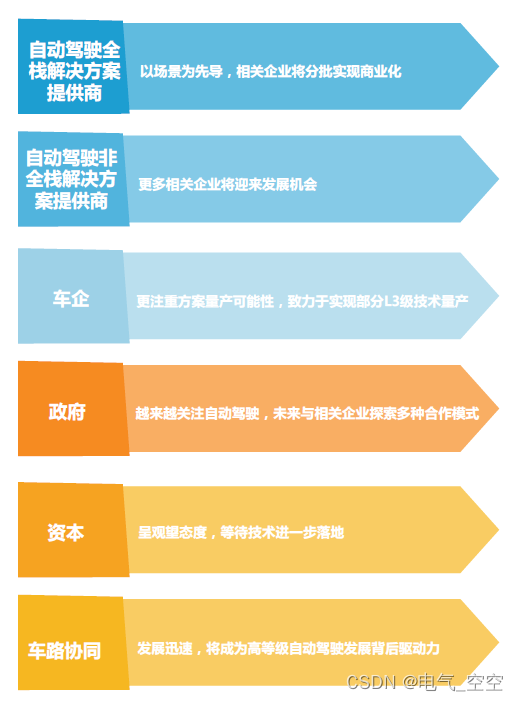
2020-2023中国高等级自动驾驶产业发展趋势研究-中国高等级自动驾驶发展近况
1.2 中国高等级自动驾驶发展近况 通过对中国高等级自动驾驶行业的观察和分析,亿欧汽车认为,除技术解决方案提供商外,如今的车企、政府、资本同样在产业链中扮演重要角色。此外,车路协同技术的发展也为高等级自动驾驶的发展提供了更…

获央视报道 联通智网科技全面引领车联网发展
当前,我国正由交通大国阔步迈向交通强国,涌现出了一批交通行业的专精特新企业,带动了我国交通行业的蓬勃发展。联通智网科股份有限公司作为中国联通在车联网领域的专精特新企业,一直坚持融合创新并积极探索车联网和智慧交通相关领…

一个热爱自动驾驶但妥妥外行之人的思考-2023
时间节点为2023年9月,有效期当下及过往,不含未来。 这些年准确说从10年就很关注自动驾驶行业,包括物流/机器人/汽车等。
也和行业内,行业外的朋友做了大量的交流。点滴沟通放在如下链接中:
动态 - CSDN 一些过去的观…
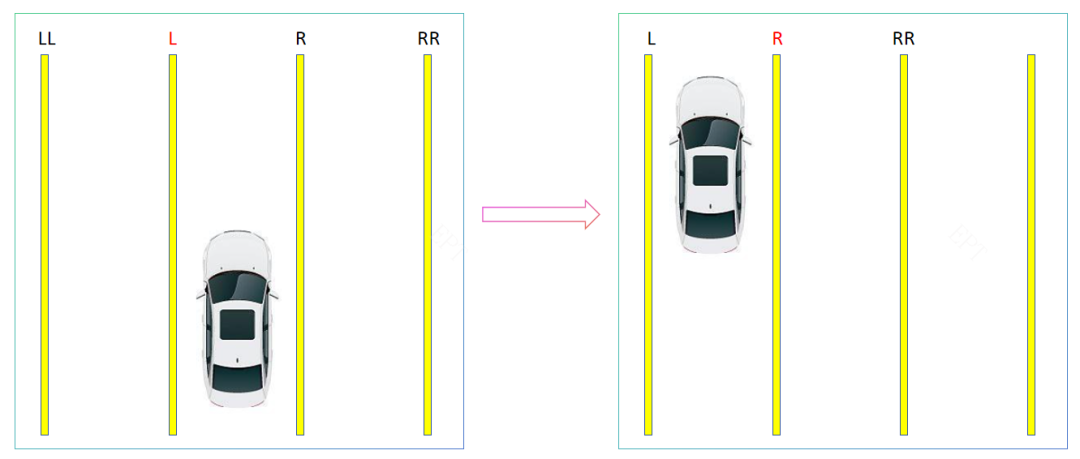
ADAS可视化系统,让自动驾驶更简单 -- 入门篇
随着车载芯片的升级、技术的更新迭代,可视化ADAS逐渐变成汽车的标配走入大家的生活中,为大家的驾车出行带来切实的便捷。那么你了解HMI端ADAS的实现过程吗?作为ADAS可视化系统的入门篇,就跟大家聊一聊目前较常见的低消耗的一种ADA…
9.17 校招 实习 内推 面经
绿泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、自动驾驶一周资讯 - 一汽与Mobileye 签署战略合作,小鹏汽车将用经销商销售逐渐替换直营模式,原小鹏汽车副总裁加盟赛力斯
自动驾驶一周资讯 - 一汽与Mobileye 签署战…
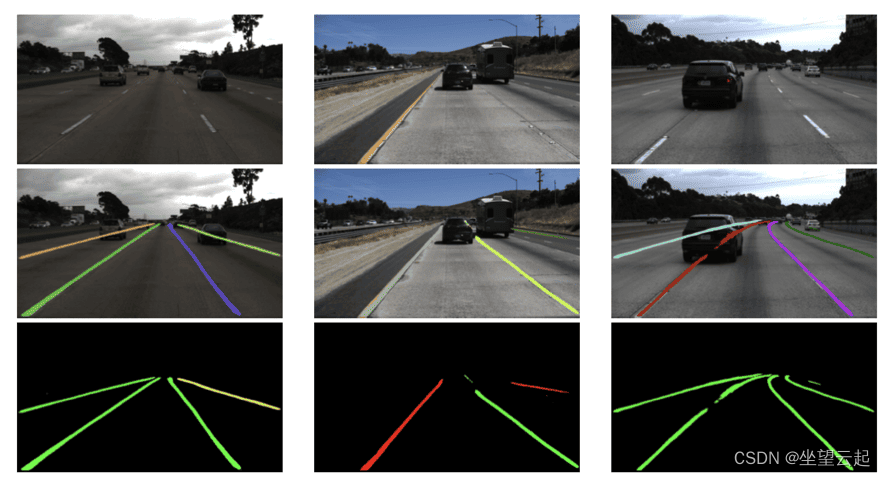
机器学习笔记 - 车道检测的几种深度学习方法
一、简述 人们在打造自动驾驶汽车时首先想到的就是实现车道检测。这是 Tesla 和 mobileye 所说的“强制性”任务,也是 Sebastian Thrun(自动驾驶汽车教父)在接受采访时所说的首要任务。 这个方向有很多传统的 OpenCV 算法,这些算法由不再使用的非常旧的函数组成。目前全部都…
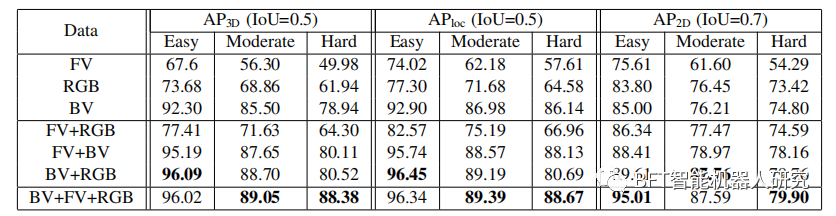
解读 | 自动驾驶系统中的多视点三维目标检测网络
原创 | 文 BFT机器人 01
背景 多视角三维物体检测网络,用于实现自动驾驶场景高精度三维目标检测,该网络使用激光雷达点云和RGB图像进行感知融合,以预测定向的三维边界框,相比于现有技术,取得了显著的精度提升。同时现…
激光雷达标定板精准识别前方障碍物
商用车自动驾驶率先进入商业化运营阶段,这主要是由于商用车对价格的敏感度更低、B端付费意愿更高,以及场景交通复杂程度较低和政策鼓励等因素。在矿区、港口、干线物流、机场、物流园区等细分场景,高级别自动驾驶正在孕育新市场。其中&#x…

自动驾驶行业观察之2023上海车展-----智驾供应链(3)
智驾解决方案商发展
华为:五项重磅技术更新,重点发布华为ADS 2.0和鸿蒙OS 3.0
1)产品方案:五大解决方案都有了全面的升级,分别推出了ADS 2.0、鸿蒙OS 3.0、iDVP智能汽车数字平台、智能车云服务和华为车载光最新 产品…
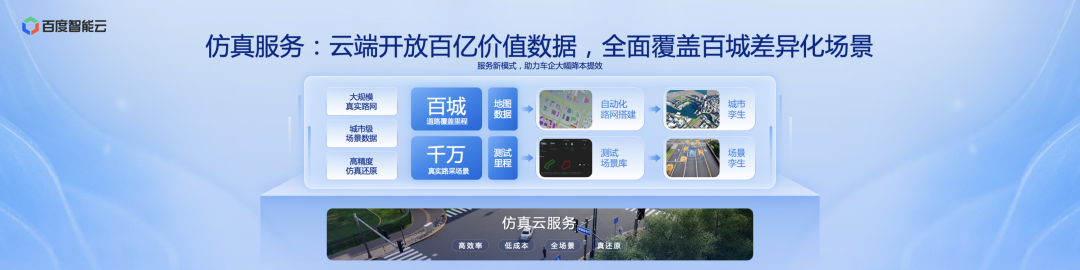
从研发域到量产域的自动驾驶工具链探索与实践
导读 本文整理自 2023 年 9 月 5 日百度云智大会 - 智能汽车分论坛,百度智能云自动驾驶云研发高级经理徐鹏的主题演讲《从研发域到量产域的自动驾驶工具链探索与实践》。 全文中部段落附有演讲中 2 个产品演示视频的完整版,精彩不容错过。 (视频观看&…
雷达得基本概念--关键词
虚拟通道:虚拟接收天线数量,发送天线*接收天线数量 chirps :一个发射波 导向矢量:本质上是描述空间相位差 空间相位差:是指的两个或多个波动现象(如电磁波或声波)在空间中的相对位置或阶段的差异…
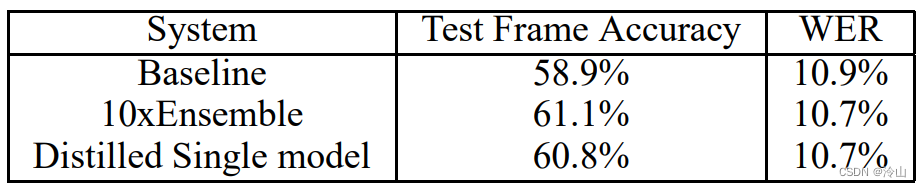
知识蒸馏(Knowledge Distillation)简述
知识蒸馏(Knowledge Distillation)简述 结论 Reference:
Distilling the Knowledge in a Neural Network知识蒸馏(Knowledge Distillation)简述(一)
知识蒸馏被广泛用于模型压缩和迁移学习当中…
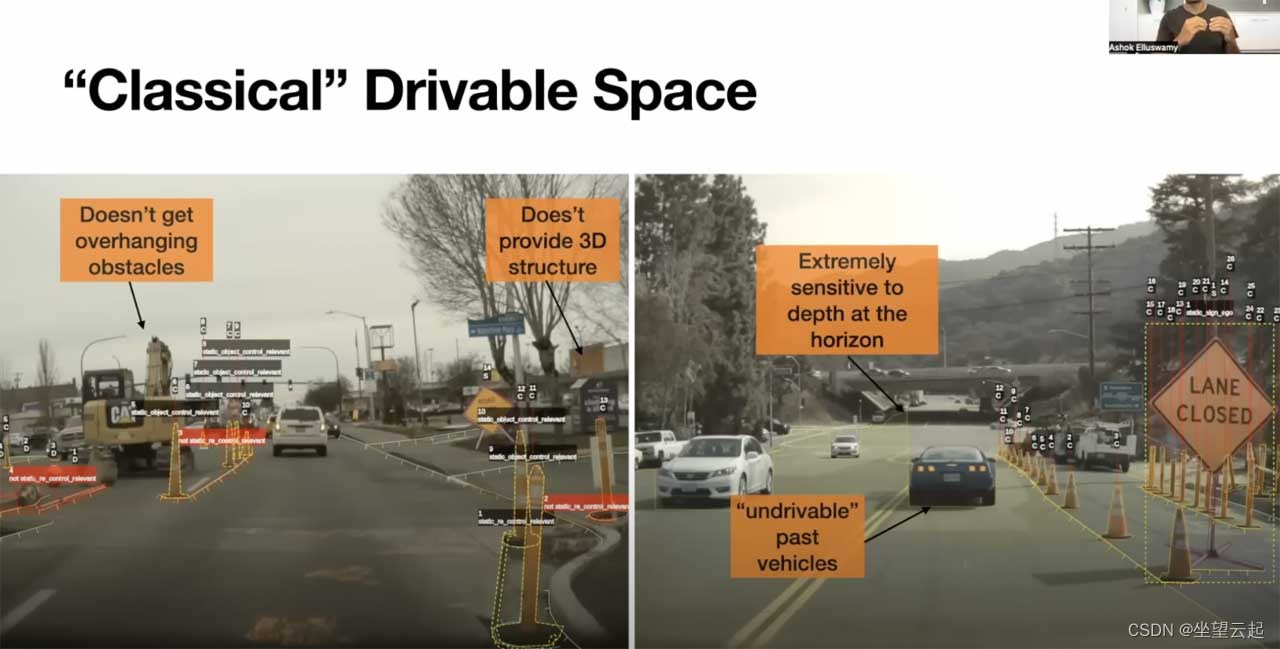
机器学习笔记 - 特斯拉的占用网络简述
一、简述
2022 年,特斯拉宣布即将在其车辆中发布全新算法。该算法被称为occupancy networks,它应该是对Tesla 的HydraNet 的改进。 自动驾驶汽车行业在技术上分为两类:基于视觉的系统和基于激光雷达的系统。后者使用激光传感器来确定物体的存在和距离,而视觉系统…

EPB功能开发与测试(基于ModelBase实现)
ModelBase是经纬恒润开发的车辆仿真软件,包含两个大版本:动力学版本、智能驾驶版本。动力学版包含高精度动力学模型,能很好地复现车辆在实际道路中运行的各种状态变化,可用于乘用车、商用车动力底盘系统算法开发、控制器仿真测试&…
轨迹规划 | 图解动态窗口算法DWA(附ROS C++/Python/Matlab仿真)
目录 0 专栏介绍1 动态障碍建模2 DWA基本原理2.1 采样窗口2.2 评价函数3 DWA算法流程4 仿真实现4.1 ROS C++实现4.2 Python实现4.3 Matlab实现0 专栏介绍
🔥附C++/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等…

自动驾驶,从“宠儿”走进“淘汰赛”
从“一步到位”到场景、技术降维。从拼落地路径,到拼雷达、算力,再到如今的性价比之争,自动驾驶似乎变得愈发“接地气”。
作者|斗斗
编辑|皮爷
出品|产业家 比起去年,黄文欢和张放今年显得更加忙碌。
“自动驾驶赛道&…
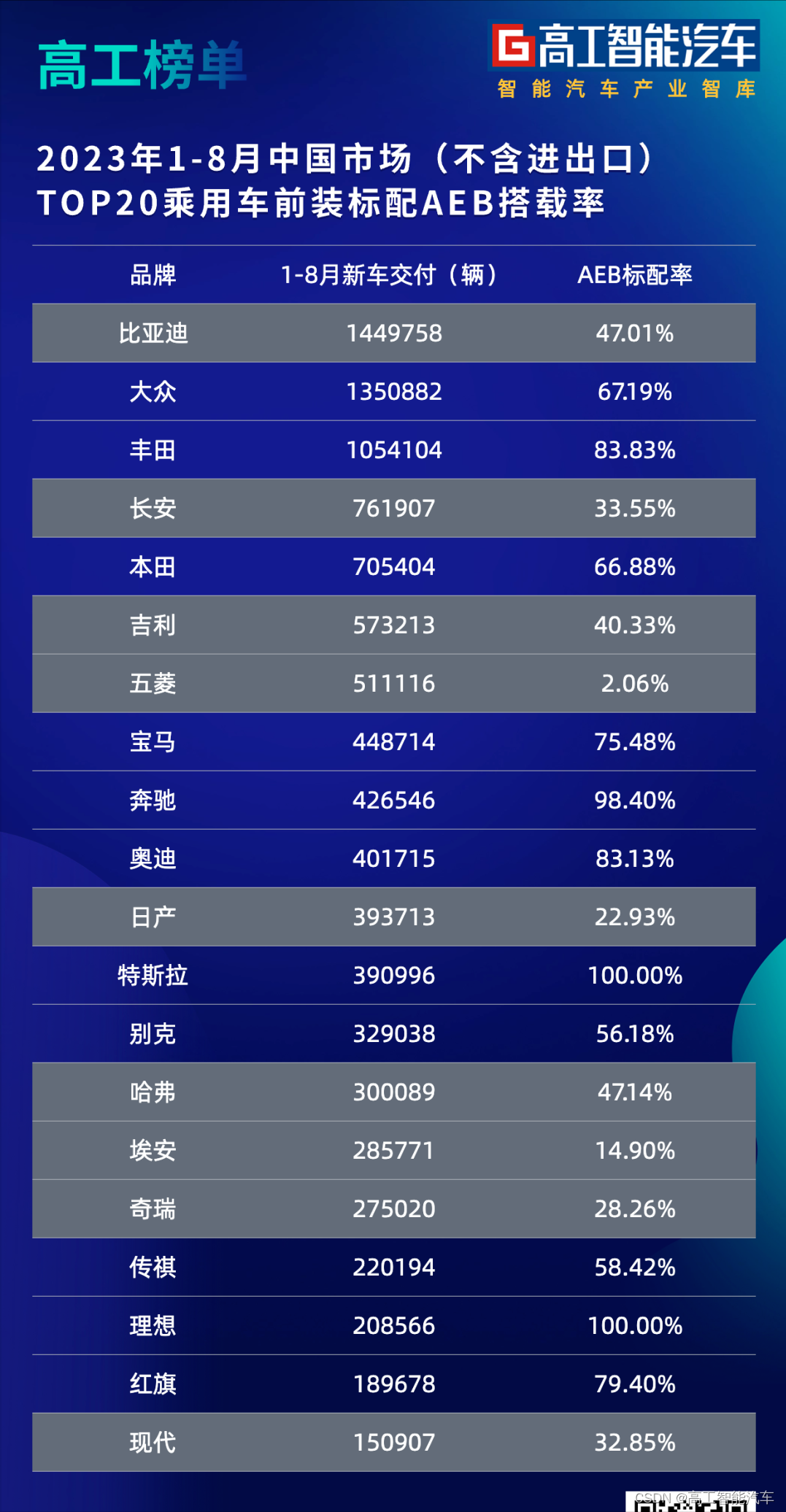
哪些车企AEB标配率「不及格」
对于汽车智能化来说,基础安全不分高低配。但实际情况,却是另一番景象。 在全球范围,目前不少国家及地区的监管机构正在考虑将AEB(紧急制动系统)作为乘用车的标配纳入法规,“这是道路安全向前迈出了重要的一…

整个自动驾驶小车001:概述
材料:
1,树梅派4b,作为主控,这个东西有linux系统,方便
2,HC-S104超声波模块,我有多个,不少于4个,我可以前后左右四个方向都搞一个 3,l298n模块,…
辅助驾驶功能开发-功能规范篇(23)-1-Mobileye NOP功能规范
1 目的 高阶辅助驾驶(NOP)或高速路自动驾驶(HWP)是舒适的驾驶功能,可在高速公路条件下和最高130公里/小时的速度下对车辆进行横向和纵向控制。激活后,该功能可以根据交通和道路状况执行自动变道(ALC)。 根据SAE J3016的定义,NOP和HWP是L2+级功能,这意味着驾驶员始终负…

云游数智农业世界,体验北斗时空智能
今日,2023年中国国际农业机械展览会在武汉正式拉开帷幕,众多与会者云集,各类农机产品纷呈,盛况空前。 千寻位置作为国家北斗地基增强系统的建设与运营方,在中国国际农业机械展览会上亮相,以「北斗时空智能 …

ROS学习记录2018.7.10
ROS学习记录2018.7.10
1.ROS基础了解
开源机器人操作系统ROS(robot operation system)
分级:
1.计算图集(一种网络结构) 1.节点:执行运算的进程(做基础处理的单元)2.消息&#x…
10月27日,每日信息差
今天是2023年10月27日,以下是为您准备的12条信息差
第一、智谱AI推出第三代基座大模型
第二、中国疾控中心流行病学首席专家吴尊友因病去世
第三、我国完成首单国际原油跨境数字人民币结算。中国石油国际事业有限公司通过上海石油天然气交易中心在交通银行开立的…

计算机视觉 激光雷达结合无监督学习进行物体检测的工作原理
一、简述 激光雷达是目前正在改变世界的传感器。它集成在自动驾驶汽车、自主无人机、机器人、卫星、火箭等中。该传感器使用激光束了解世界,并测量激光击中目标返回所需的时间,输出是点云信息,利用这些信息,我们可以从3D点云中查找障碍物。 从自动驾驶汽车的角度看激光雷达…
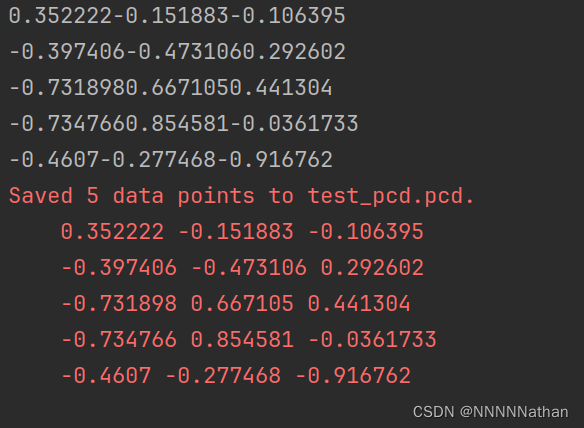

问界、智界、阿维塔连续出牌,余承东的2023王炸
作者 | 德新
编辑 | 王博 刚刚过去的一周,绝对是华为智能汽车业务的关键一周。
11月9日,华为智选车的首款纯电轿车,与奇瑞合作的智界S7发布并开启预售。过了一个周末后,智界S7已获得超过 1万张预订订单 。
次日,基于…
探索控制领域:从电视遥控器到自动驾驶【基础概念理解、应用实例】
当谈到控制学和控制系统时,你可能会联想到电视遥控器、自动驾驶汽车、飞机自动驾驶系统以及许多其他自动化系统。但控制学是一个更广泛的学科,它涵盖了各种领域,从工程到生物学,从经济学到环境科学。让我们深入了解控制学的基本概…
11.6 校招 实习 内推 面经
绿*泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、校招 | 乾元实验室2024届校招
校招 | 乾元实验室2024届校招 2、校招|国网电力空间技术有限公司2024届高校毕业生招聘
校招|国网电力空间技术有限公司2024届高校毕…
从零搭建一台基于ROS的自动驾驶车-----5.路径规划与导航
系列文章目录
北科天绘 16线3维激光雷达开发教程 基于Rplidar二维雷达使用Hector_SLAM算法在ROS中建图 Nvidia Jetson Nano学习笔记–串口通信 Nvidia Jetson Nano学习笔记–使用C语言实现GPIO 输入输出 Autolabor ROS机器人教程 从零搭建一台基于ROS的自动驾驶车-----1.整体介…

使用电位器和Arduino实现步进电机控制
在本篇文章中,我们将学习如何使用电位器和Arduino开发板实现步进电机控制。步进电机可用于软盘驱动器、平板扫描仪、计算机打印机、绘图仪、图像扫描仪、光盘驱动器、智能照明、相机镜头、CNC机器以及最近比较流行的3D打印机。
因此,在本文中我们将学习…
卡车盲区监测+360全景
一、背景分析
1.AI视觉智能终端的ADAS主动防撞告警、DMS驾驶员异常行为告警功能。通过摄像头和人工智能算法对前方车辆、车道、交通场景进行检测识别,再结合对车辆运动状态和驾驶员行为的分析,有效预测ADAS前车碰撞、车道偏离等危险,并对DMS…

【视觉SLAM入门】5.2. 2D-3D PNP 3D-3D ICP BA非线性优化方法 数学方法SVD DLT
"养气之学,戒之躁急" 1. 3D-2D PNP1.1 代数法1.1.1 DLT(直接线性变换法)1.1.2. P3P 1.2 优化法BA (Bundle Adjustment)法 2. 3D-3D ICP2.1 代数法2.1.1 SVD方法 2.2 优化(BA)法2.2.2 非线性优化方法 前置事项:
1. 3D-2D PNP
该问题描述为&am…
Getting started with Scenic
1. References
[1] CARLA 0.9.11 Release - CARLA Simulator
[2] Getting Started with Scenic — Scenic documentation

如何使用git 生成patch 和打入patch
先git log,得到不同的ID git format-patch
$ git format-patch HEAD^ #生成最近的1次commit的patch
$ git format-patch HEAD^^ #生成最近的2次commit的patch
$ git format-patch HEAD^^^ …
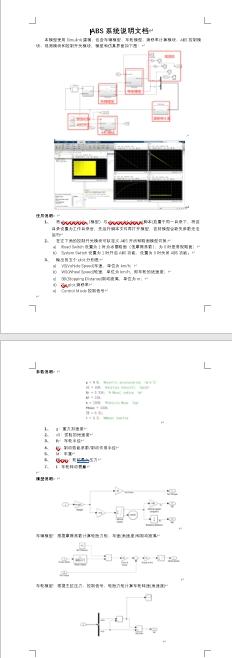
ABS防抱死Simulink仿真模型 可控制切换冰雪路面和开关ABS系统控制
ABS防抱死Simulink仿真模型 可控制切换冰雪路面和开关ABS系统控制,仿真输出时域下的车速、轮速、制动距离、滑移率、控制信号曲线,模型可以配置车重、滑移率-摩擦系数曲线、主缸压力、制动效能因数等参数。包含一个说明文档id661781608412&
百度Apollo:引领自动驾驶技术创新的先锋
文章目录 前言一、内容总结 前言
大家好,我是萝卜头不吃萝卜头,今天和大家分享一下我学习百度Apollo自动驾驶的心得。 在七月份的时候,我收到了Apollo开发者社区的邀请,进行学习Apollo自动驾驶汽车的2023星火培训训练,…
ROS入门(二)roslaunch的.launch文件的XML格式
roslaunch的.launch文件的XML格式前言1. 什么是roslaunch1.2 roslaunch的使用2. 赋值顺序3. 参数替换3.1 $(env ENVIRONMENT_VARIABLE)3.2 $(optenv ENVIRONMENT_VARIABLE) 3.2 或$(optenv ENVIRONMENT_VARIABLE default_value)3.2.1 例子3.3 $(find pkg)3.3.1 例子3.4 $(anon …

ROS入门(一)话题通信学习笔记
参考链接:古月居ROS入门21讲第7 8 10 11 12讲 话题通信学习笔记1. 话题通信1.1 话题(Topic)—— 异步通信机制1.2 消息(Message)—— 话题数据2. 利用海龟游戏理解话题2.1 通过键盘控制2.2 利用命令行使海龟动起来2.3 …
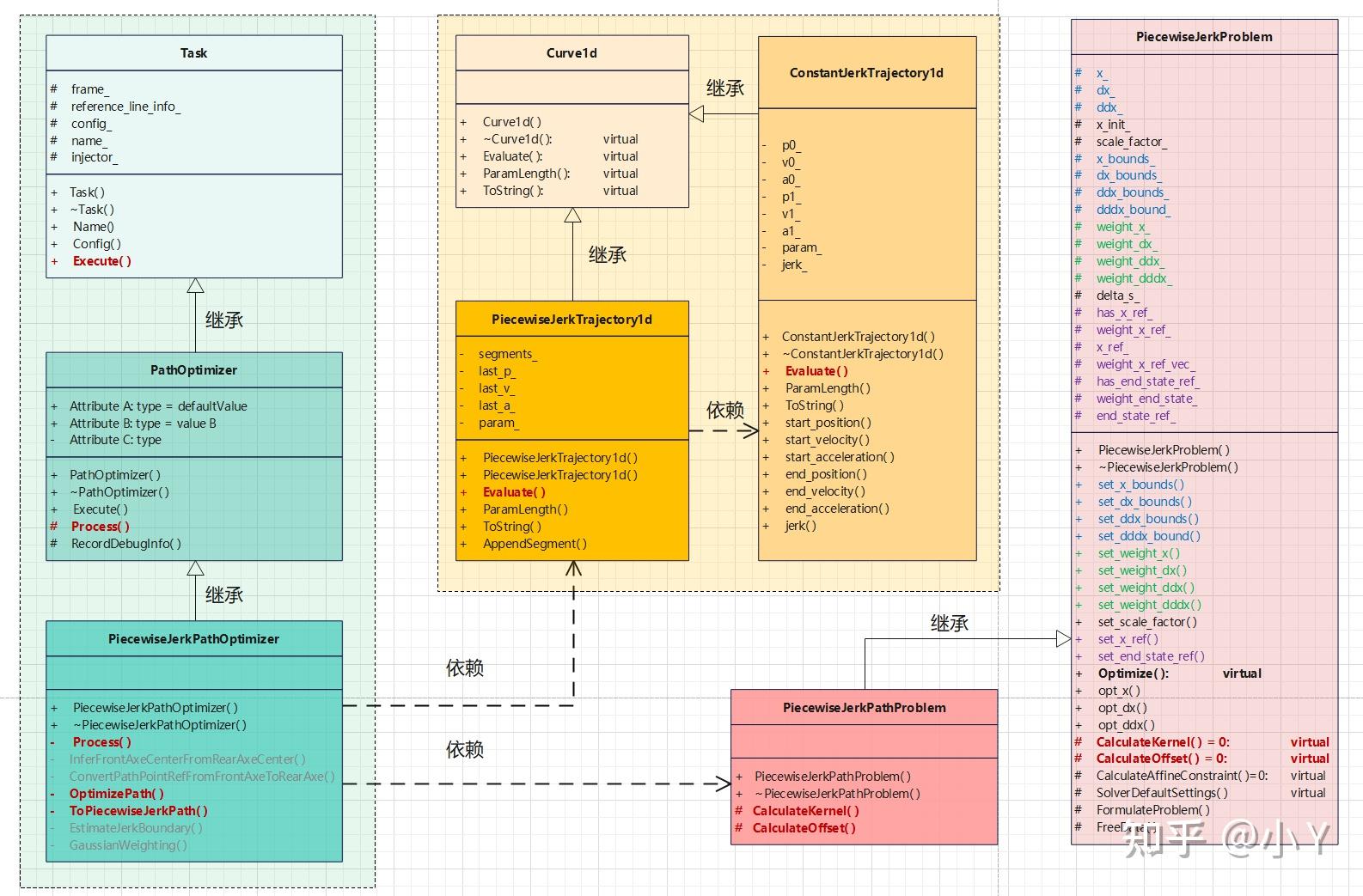
【Apollo学习笔记】——规划模块TASK之PIECEWISE_JERK_PATH_OPTIMIZER
文章目录 前言PIECEWISE_JERK_PATH_OPTIMIZER功能简介PIECEWISE_JERK_PATH_OPTIMIZER相关配置PIECEWISE_JERK_PATH_OPTIMIZER总体流程OptimizePathpiecewise_jerk_problem二次规划问题标准形式定义优化变量定义目标函数设计约束OptimizeFormulateProblem计算QP系数矩阵Calculat…
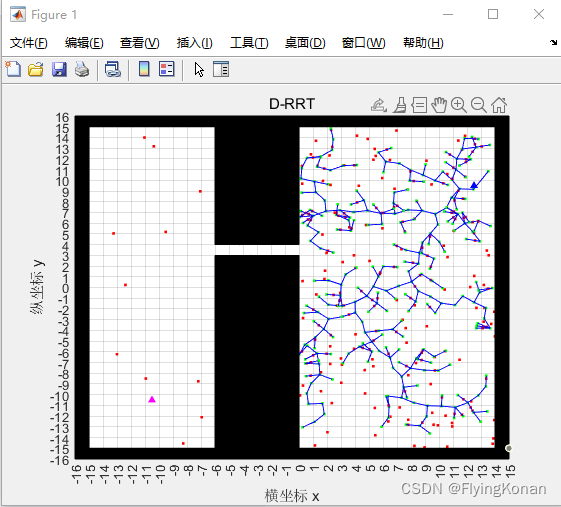
无人驾驶路径规划(一)全局路径规划 - RRT算法原理及实现
前言:由于后续可能要做一些无人驾驶相关的项目和实验,所以这段时间学习一些路径规划算法并自己编写了matlab程序进行仿真。开启这个系列是对自己学习内容的一个总结,也希望能够和优秀的前辈们多学习经验。
一、无人驾驶路径规划
众所周知&a…
基于深度学习的自动驾驶汽车语义分割与场景标注算法研究。
自动驾驶汽车是当前研究的热点领域之一,其中基于深度学习的语义分割与场景标注算法在自动驾驶汽车的视觉感知中具有重要作用。本文将围绕自动驾驶汽车的语义分割与场景标注算法展开研究。
一、研究背景
随着人工智能技术的不断发展,自动驾驶汽车逐渐成…
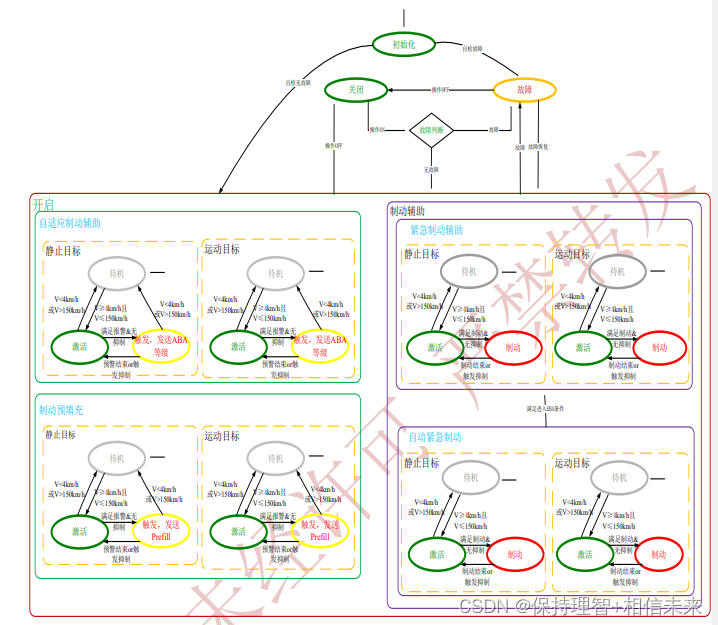
辅助驾驶功能开发-功能规范篇(22)-7-L2级辅助驾驶方案功能规范
1.3.7 AEB 系统功能定义
1.3.7.1 车辆(纵向)AEB 系统
1.3.7.1.1 状态机
1)前碰撞预警系统状态机 2)AEB 功能状态机(Prefill、ABA、制动辅助为并行关系) 1.3.7.1.2 信号需求列表
1.3.7.1.3 系统开启关闭 1)初始化 车辆上电后,前向毫米波雷达进行初始化,控制器需要…

【DriveGPT学习笔记】自动驾驶汽车Autonomous Vehicle Planning
原文地址:DriveGPT - Lei Maos Log Book
自动驾驶汽车的核心软件组件是感知、规划和控制。规划是指在给定场景或一系列场景的情况下为自动驾驶汽车制定行动计划的过程,以实现安全和理想的自动驾驶。 用于规划的场景是从感知软件组件获得的。计划的行动将…
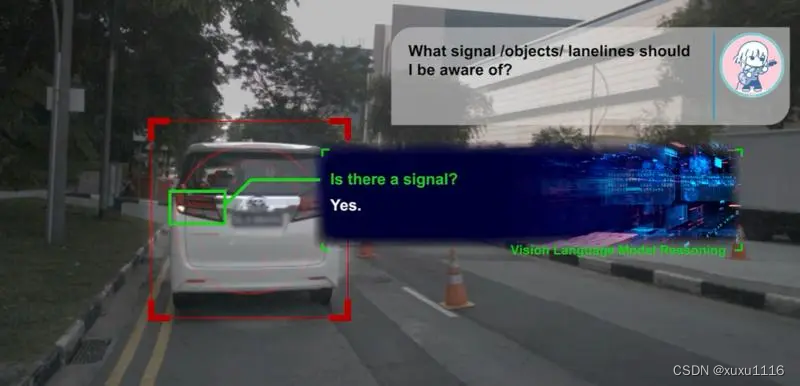
自动驾驶的同学看过来:DriveLM:世界首个语言+自动驾驶全栈开源数据集
DriveLM:世界首个语言自动驾驶全栈开源数据集,旨在借助大语言模型和海量自然语言数据集,构筑复杂场景下安全、精准、可解释的自动驾驶系统,突破现有自动驾驶推理能力上限,数据集已开源!
DriveLM提供了量化…
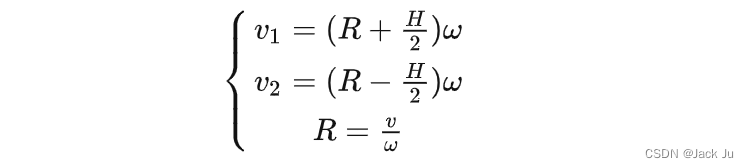
机器人控制算法——两轮差速驱动运动模型
1.Introduction 本文主要介绍针对于两轮差速模型的逆运动学数学推导。因为在机器人控制领域,决策规划控制层给执行器输出的控制指令v(车辆前进速度)和w(角速度),因此,我们比较关心,当底层两个驱动电机接收到此信息,如何…
【AI视野·今日Robot 机器人论文速览 第五十期】Mon, 9 Oct 2023
AI视野今日CS.Robotics 机器人学论文速览 Mon, 9 Oct 2023 Totally 25 papers 👉上期速览✈更多精彩请移步主页 Daily Robotics Papers
Learning to Grasp: from Somewhere to Anywhere Authors Fran ois H l non, Johann Huber, Fa z Ben Amar, St phane Doncieux…
概念解析 | 自动驾驶中的Corner Case剖析: 分类、处理方法和挑战
注1:本文系“概念解析”系列之一,致力于简洁清晰地解释、辨析复杂而专业的概念。本次辨析的概念是:自动驾驶中的Corner Case。 参考资料:https://openaccess.thecvf.com/content/ICCV2021W/ERCVAD/papers/Bogdoll_Description_of_Corner_Cases_in_Automated_Driving_Goals_and…
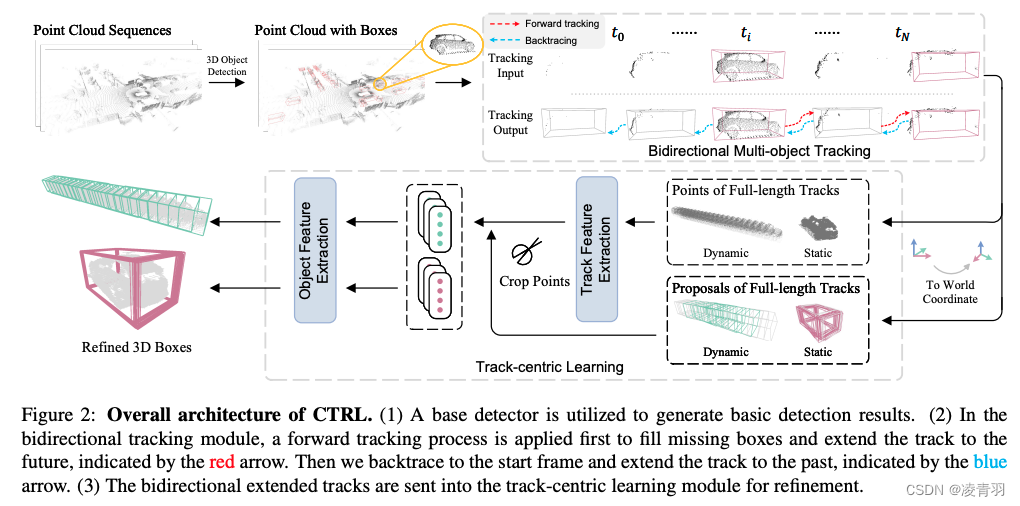
Talk2BEV: Language-enhanced Bird’s-eye View Maps for Autonomous Driving
论文标题为“Talk2BEV: Language-enhanced Bird’s-eye View Maps for Autonomous Driving”,主要介绍了一种新型的视觉-语言模型(LVLM)界面,用于自动驾驶情境中的鸟瞰图(BEV)映射。以下是论文的主要内容概…
辅助驾驶功能开发-系统方案篇-地平线超级驾驶解决方案介绍
01.产品方案
Horizon Matrix SuperDrive超级驾驶解决方案,助力汽车智能化步入人机共驾时代
SuperDrive超级驾驶解决方案,全面整合了自动驾驶、智能交互、云端大脑三大模块,形成完整的泛车载AI人工智能系统,帮助整车智能化提升到一个新的高度。该方案的核心硬件-车载中央计…
11月7日,每日信息差
今天是2023年11月07日,以下是为您准备的17条信息差
第一、五粮液否认内部讨论提价传闻
第二、雷军证实小米14销量已超百万台
第三、支付宝生活号全面开放UGC入口。据了解,今年以来,支付宝生活号陆续上线了创作者中心、热点榜单等多个内容产…
位置pid与增量pid
import numpy as npclass Controller:def __init__(self, u0):# ##增量pid# self.Kp 0.1# self.Kd 5# self.Ki 0.000# self.u 0# self.uMin 0# self.uMax 16# # 误差累加和# self.err 0# self.err_k_1 0# self.err_k_2 0# 位置pidself.Kp 0.5self.Kd 0self.Ki 0.00…
(02)Cartographer源码无死角解析-(74) 2D后端优化→OptimizationProblem2D-里程计、local位姿、GPU残差
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文…
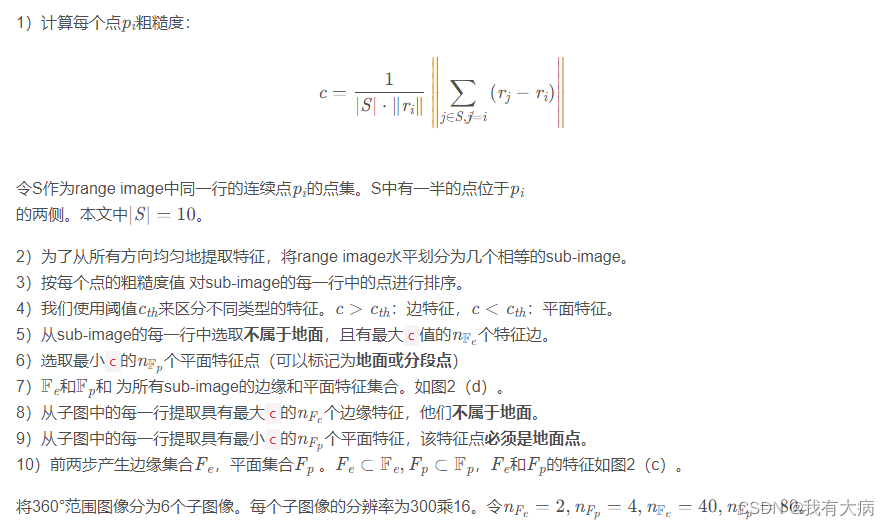
【LeGO-LOAM论文阅读(二)--特征提取(一)】
论文理论部分
特征提取不是从原始点云中进行提取,而是从点云分割中分割出的地面点和分割点中进行提取。参考:LeGO-LOAM论文翻译(内容精简) 过程如下: 只看核心理论部分还是很好理解的。总体流程:(特征提取…

手把手教你训练自己的YOLO V4数据集,过程超详细,附带作者测试数据集
手把手教你训练自己的YOLO V4数据集,超详细教程,附带训练数据集整体训练来源与结果YOLO V4 论文链接:https://arxiv.org/abs/2004.10934YOLO V4 开源代码:https://github.com/AlexeyAB/darknet本次训练系统环境整体数据处理流程训…
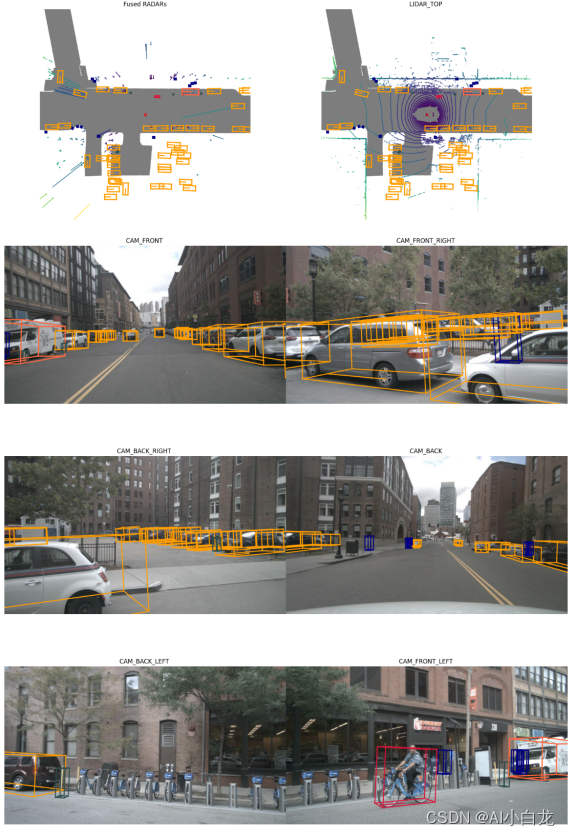
【自动驾驶】PETR 环境安装与测试
1.环境安装
该工程依赖MMCV, MMDetection, MMDetection3d,MMSegmentation
Install MMCV
pip install mmcv-full -f https://download.openmmlab.com/mmcv/dist/{cu_version}/{torch_version}/index.htmlexamples:
pip install…
9月22日,每日信息差
今天是2023年09月22日,以下是为您准备的14条信息差
第一、亚马逊将于2024年初在Prime Video中加入广告。Prime Video内容中的广告将于2024年初在美国、英国、德国和加拿大推出,随后晚些时候在法国、意大利、西班牙、墨西哥和澳大利亚推出
第二、中国移…
9.19 校招 实习 内推 面经
绿泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格
9.19 校招 实习 内推 面经 1、校招丨中联重科2024届校园招聘(内推)
校招丨中联重科2024届校园招聘(内推) 2、2023校招总结--SLAM/C开发 - 8
2…
9.23 校招 实习 内推 面经
绿泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、校招 | 友道智途2024年校招开启&招聘投递Q&A(内推)
校招 | 友道智途2024年校招开启&招聘投递Q&A(内推) 2、校招 | ABB机器人…
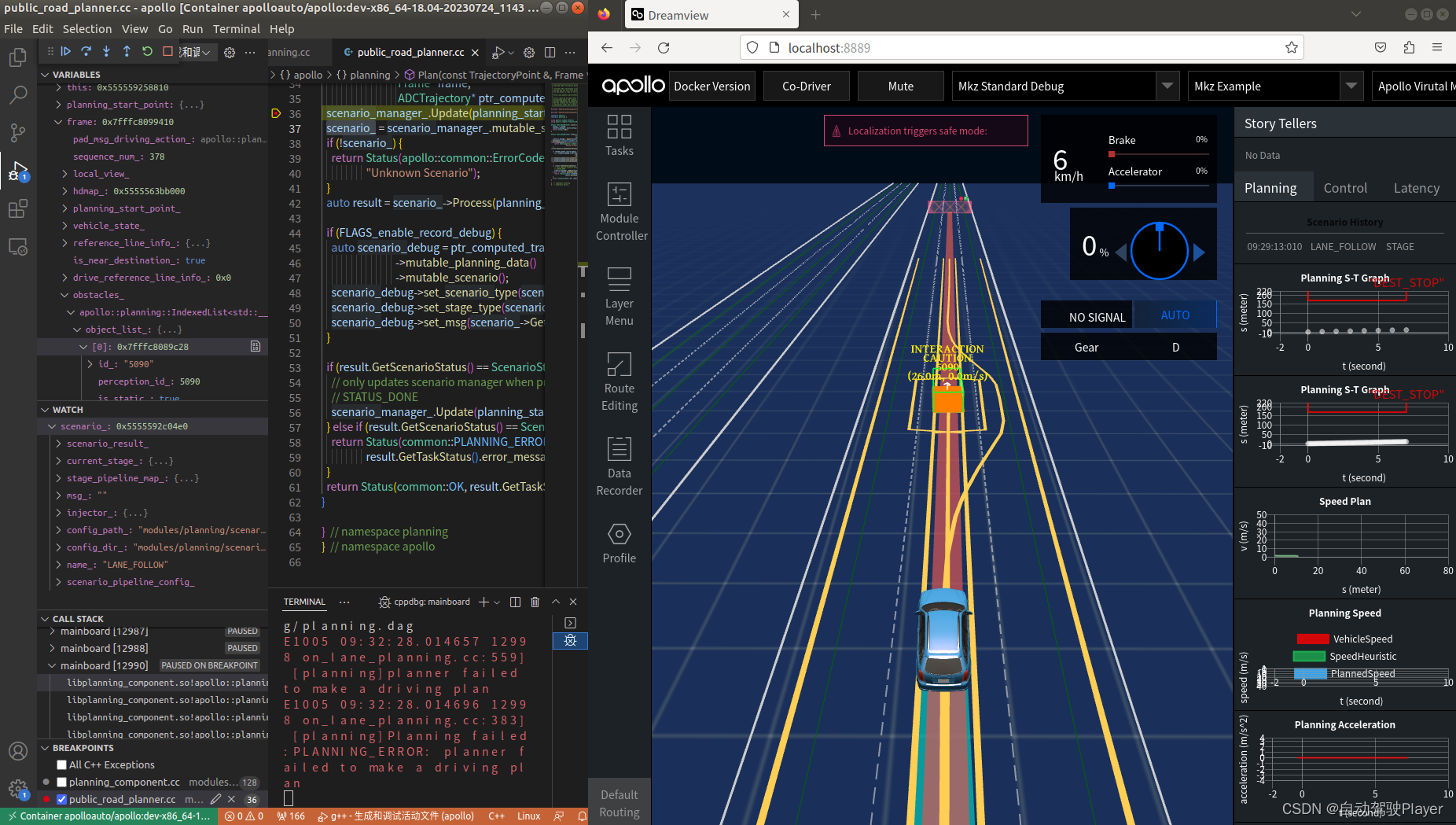
Apollo Planning2.0决策规划算法代码详细解析 (2): vscode gdb单步调试环境搭建
前言:
apollo planning2.0 在新版本中在降低学习和二次开发成本上进行了一些重要的优化,重要的优化有接口优化、task插件化、配置参数改造等。
GNU symbolic debugger,简称「GDB 调试器」,是 Linux 平台下最常用的一款程序调试器。GDB 编译器通常以 gdb 命令的形式在终端…
9.28 校招 实习 内推 面经
绿泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格
1、校招|禾多科技2024校园招聘火热开启(内推)
校招|禾多科技2024校园招聘火热开启(内推) 2、校招|北汽集团…
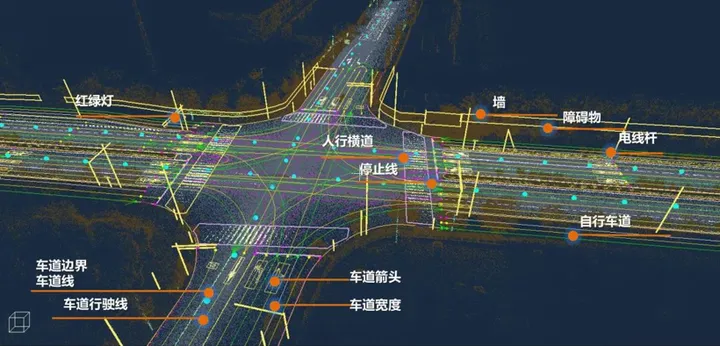
自动驾驶技术的基础知识
自动驾驶技术是现代汽车工业中的一项革命性发展,它正在改变着我们对交通和出行的理解。本文将介绍自动驾驶技术的基础知识,包括其概念、历史发展、分类以及关键技术要素。 1. 自动驾驶概念
自动驾驶是一种先进的交通技术,它允许汽车在没有人…

VINS-Mono-后端优化 (二:预积分残差雅可比推导)
文章目录 对位置 δ α \delta\alpha δα 进行求导位置误差 δ α \delta\alpha δα 对平移 P b k w P^{w}_{b_{k}} Pbkw 的求导位置 δ α \delta\alpha δα 对旋转 R w b k R^{b_{k}}_{w} Rwbk 进行求导 对速度 δ β \delta\beta δβ 进行求导速度 δ β…

基础课6——计算机视觉
1.计算机视觉的概念与原理
1.1概念
计算机视觉(CV)是人工智能的一个重要发展领域,属于计算机科学的一个分支,它企图让计算机能像人类一样通过视觉来获取和理解信息。计算机视觉的应用非常广泛,包括但不限于图像识别、…
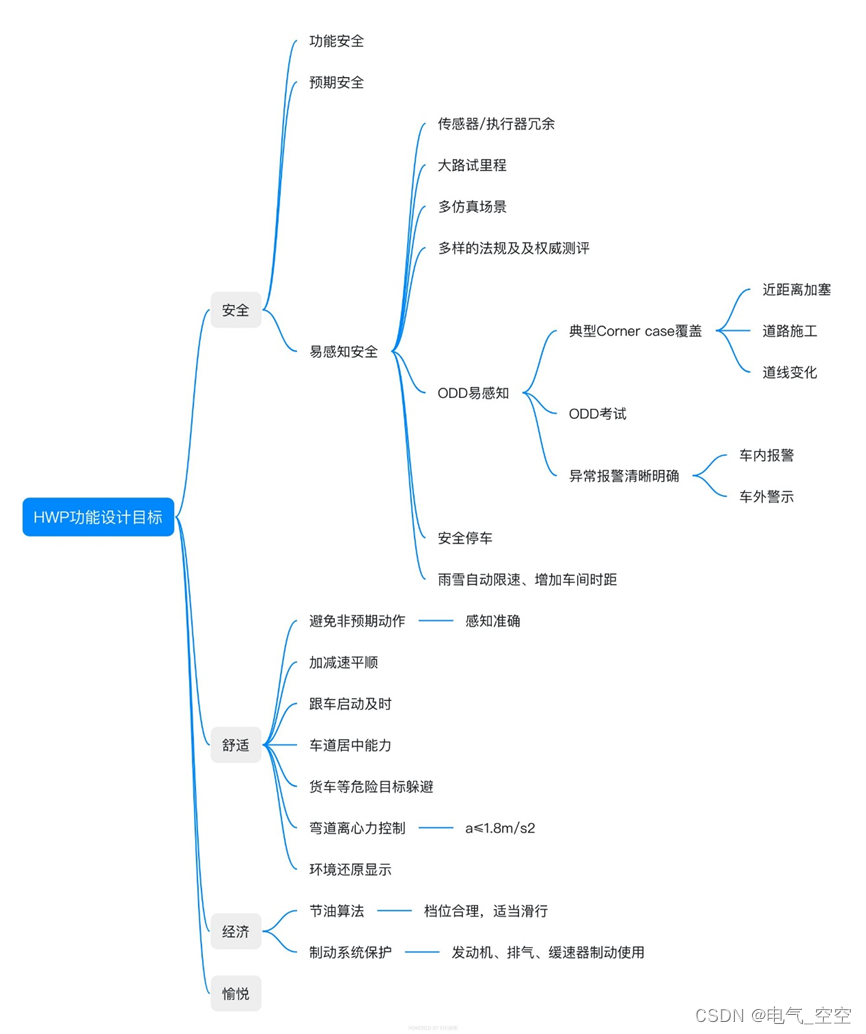
自动驾驶HWP功能规范
HWP功能规范
Highway Pilot Functional Specification 文件状态: 【√】草稿 【】正式发布 【】正在修改 文件起草分工 撰写: 审核: 编制: 签名: 日期: 审核: 签名: 日期&am…
视觉SLAM数据集(三):KITTI 数据集
教程目录 一、官网二、注册登录三、下载数据集四、测试数据集 一、官网 官网地址:https://www.cvlibs.net/datasets/kitti/eval_odometry.php Kitti数据集很庞大,包含了双目、光流、场景流、深度、里程计、目标、跟踪、马路、语义、原始数据等大类别&…
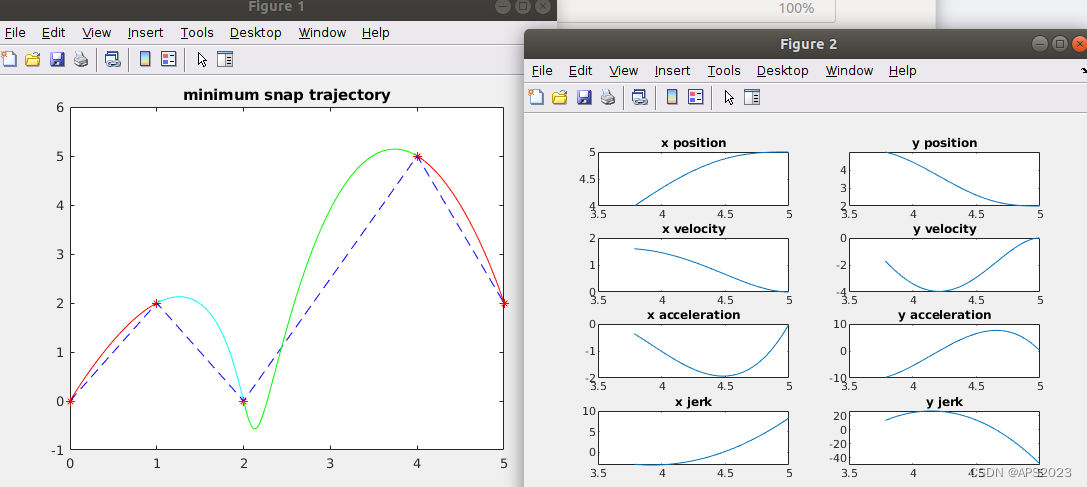
自动驾驶算法(九):多项式轨迹与Minimun Snap原理与Matab代码详解
目录 1 为什么需要轨迹优化
2 代码解析
3 完整代码 1 为什么需要轨迹优化 我们利用前八篇所学的博客可以利用RRT、A*、遗传算法等设计出一条折线轨迹,轨迹优化就是在路径优化的基础上将折线优化成曲线,这样更加有利于无人机的飞行。 那么什么是多项式轨…
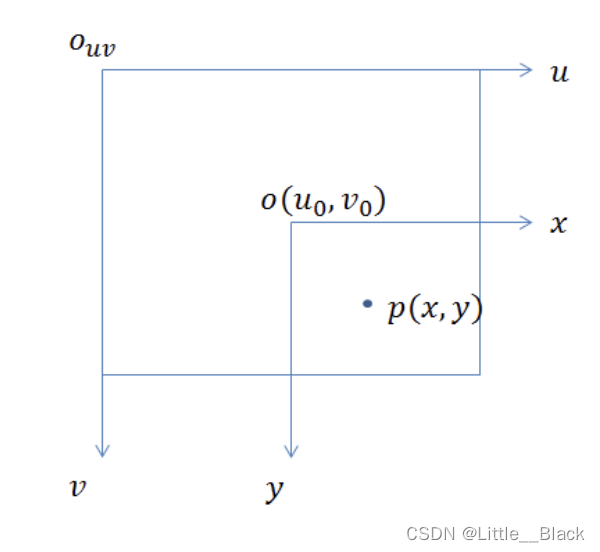
自动驾驶之—车道线感知
零、前言 : 最近在学习自动驾驶方向的东西,简单整理一些学习笔记,学习过程中发现宝藏up 手写AI 一、视觉系统坐标系 视觉系统一共有四个坐标系:像素平面坐标系(u,v)、图像坐标系(x,y)…
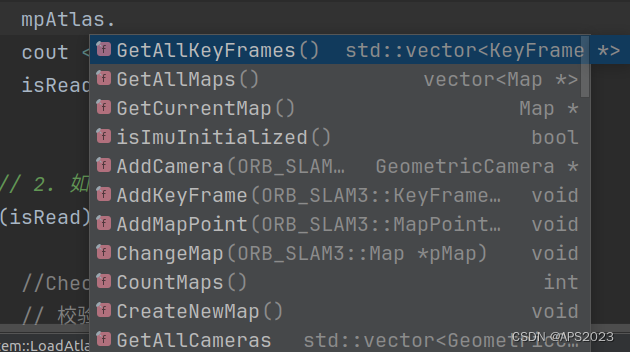
2.ORB-SLAM3中如何从二进制文件中加载多地图、关键帧、地图点等数据结构
目录 1 为什么保存&加载(视觉)地图
1.1 加载多地图的主函数
1.2 加载各个地图 Atlas::PostLoad
1.3 加载关键帧及地图点Map::PostLoad
1.4 恢复地图点信息 MapPoint::PostLoad
1.5 恢复关键帧信息KeyFrame::PostLoad 1 为什么保存&加载(视觉)地图 因为我们要去做导…
TC397 EB MCAL开发从0开始系列 之 [6.0] IRQ配置 - 配置及代码介绍
一、IRQ配置1、配置目标2、目标依赖2.1 硬件使用2.2 软件使用2.3 新增模块3、EB配置3.1 配置讲解3.2 模块配置3.2.1 IRQ配置3.2.1.1 Stm模块Irq配置3.2.1.2 Gpt模块Irq配置3.2.1.3 Adc模块Irq配置3.2.1.4 Can模块Irq配置->
自动驾驶右向辅助功能规范
目 录 Contents
目录
1. 介绍 Introduction. 8
1.1 此文档的范围和目的 Scope and Purpose of This Document 8
1.2 参考文档References. 9
1.3 文档的维护 Maintenance of the Document 10
1.4 缩略词Abbreviations. 10
1.5 文档概述Document Overview.. 11
1.6 功能…

建模分析 | 差速轮式移动机器人运动学建模(附Python/Matlab仿真)
目录 0 专栏介绍1 差速模型定义2 控制量与驱动量3 运动学方程4 仿真实现4.1 Python仿真4.2 Matlab仿真 0 专栏介绍
🔥附C/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等)ÿ…
自动驾驶汽车:人工智能最具挑战性的任务
据说,自动驾驶汽车是汽车行业梦寐以求的状态,将彻底改变交通运输业。就在几年前,对自动驾驶汽车的炒作风靡一时,那么到底发生了什么呢?这么多公司吹嘘到2021年我们将迎来的无人驾驶汽车革命在何处?事实证明…
从座舱到行泊一体,亿咖通科技做对了什么?
行泊一体赛道又迎来了一个重磅玩家。
据了解,亿咖通科技旗下基于两颗华山二号A1000芯片打造的亿咖通天穹Pro行泊一体智能驾驶计算平台,目前已经正式在领克08上面实现规模化量产交付。 亿咖通天穹Pro智能驾驶计算平台
值得一提的是,该行泊一…
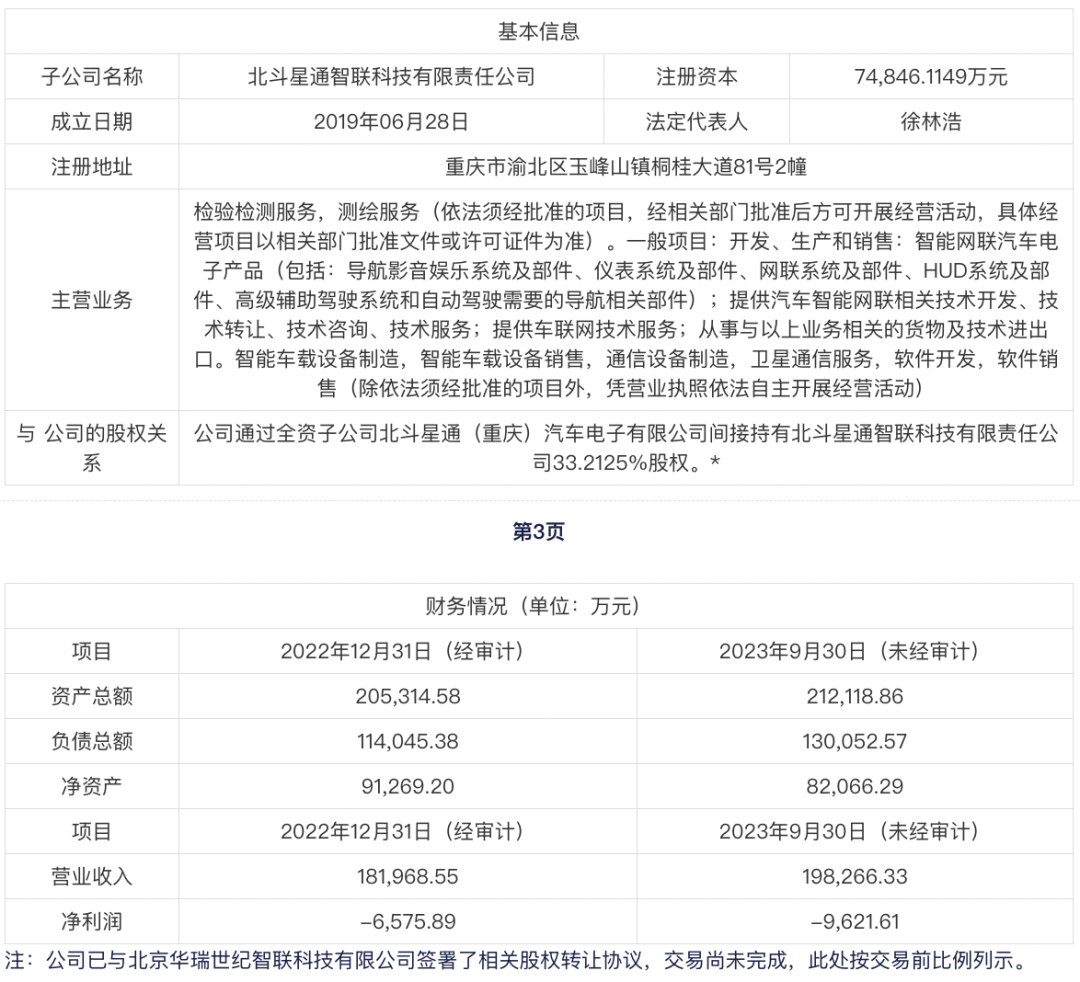
前三季度亏损近亿元,「缺钱」的北斗智联拟变更控股股东
本月初,北斗星通发布《关于深圳证券交易所重组问询函回复的公告》,针对公司全资子公司拟出售孙公司北斗星通智联科技有限责任公司(以下简称北斗智联) 15%的股权事宜做出进一步解读。 按照此前计划,15%的股权࿰…
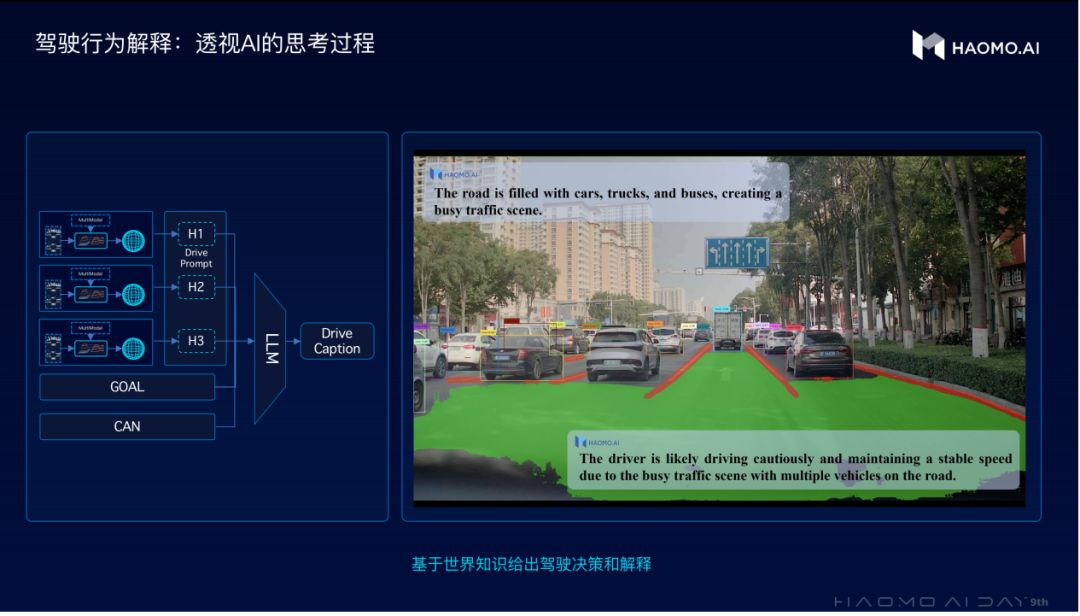
自动驾驶大模型,是怎么学习「世界知识」的?
近期,科技产业大佬不约而同地发出一个非常强烈的信号:自动驾驶走向完全的成熟,必须要被AI大模型重构。
中国工程院院士、清华大学教授、清华智能产业研究院(AIR)院长张亚勤认为,「自动驾驶是高度复杂的、最…
【AI视野·今日Robot 机器人论文速览 第六十四期】Fri, 27 Oct 2023
AI视野今日CS.Robotics 机器人学论文速览 Fri, 27 Oct 2023 Totally 27 papers 👉上期速览✈更多精彩请移步主页 Daily Robotics Papers
6-DoF Stability Field via Diffusion Models Authors Takuma Yoneda, Tianchong Jiang, Gregory Shakhnarovich, Matthew R. …
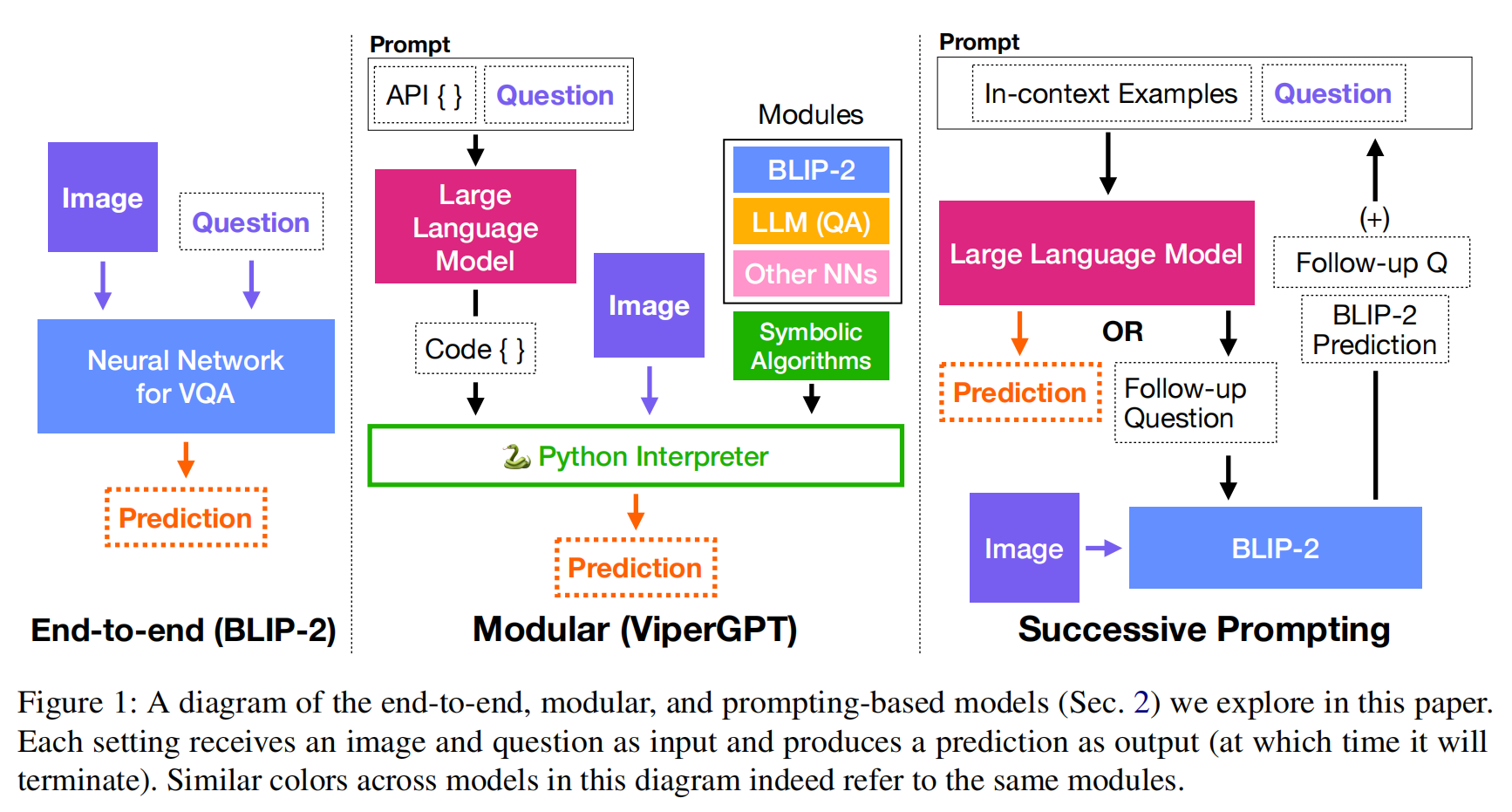
CV计算机视觉每日开源代码Paper with code速览-2023.11.14
点击CV计算机视觉,关注更多CV干货
论文已打包,点击进入—>下载界面
点击加入—>CV计算机视觉交流群
1.【基础网络架构:Transformer】Aggregate, Decompose, and Fine-Tune: A Simple Yet Effective Factor-Tuning Method for Vision…
自动驾驶芯片指标AI算力TOPS和CPU算力DMIPS
自动驾驶芯片指标AI算力TOPS和CPU算力DMIPS 文章目录 自动驾驶芯片指标AI算力TOPS和CPU算力DMIPS智能驾驶芯片CPU GPU NPU算力单位TOPS乘积累加运算MACTOPS计算公式GPU算力TFLOPSTFLOPS与TOPS的换算CPU算力DMIPS 智能驾驶芯片
根据地平线数据,
L2级自动驾驶的算力…

自动驾驶中的LFM(LED 闪烁缓解)问题
自动驾驶中的LFM Reference:
自动驾驶系统如何跨越LFM这道坎?
从路灯、交通灯,到车载照明,低功耗、长寿命、高可靠的 LED 正在快速取代传统照明方式。但 LED 在道路上的普遍使用,却带来“LED闪烁”现象。“LED闪烁”是由 LED 驱…
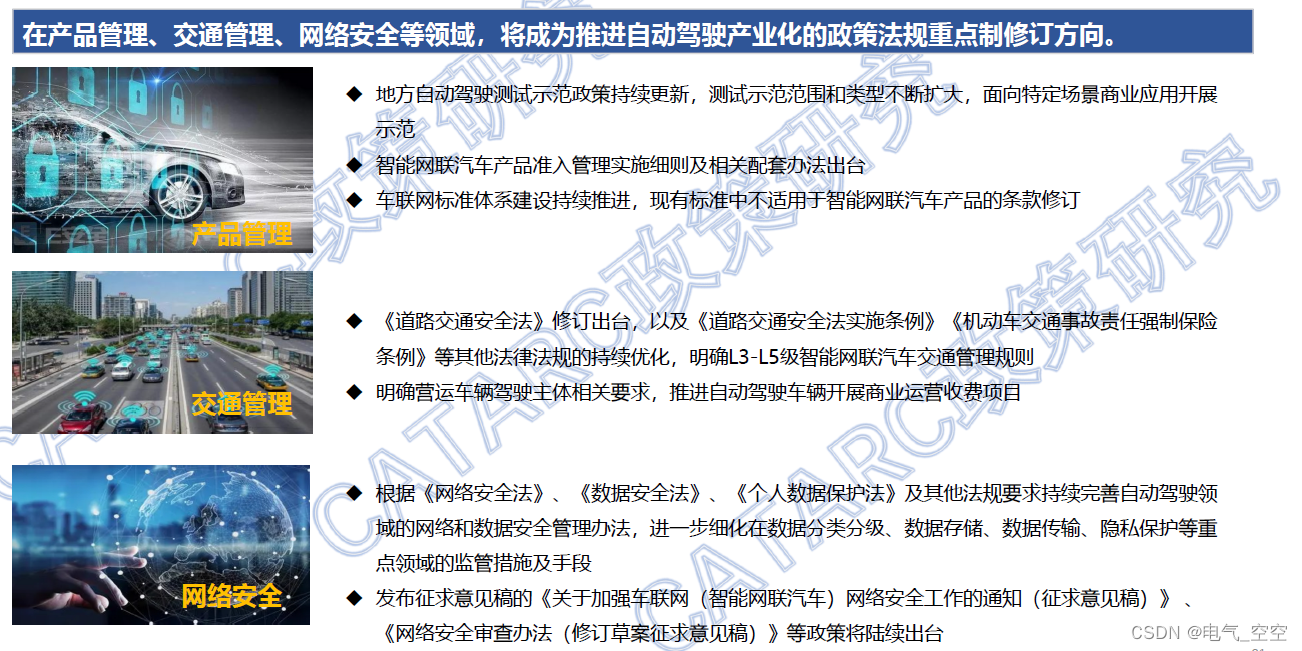
商用车自动驾驶政策现状及趋势预判
一、我国自动驾驶法规政策体系 二、重点领域法规政策进展
1、战略引导 2、法律法规 3、标准体系 4、测试认证 5、创新支持 6、配套环境 三、“十四五”期间政策发展趋势
1、应用场景 2、法规标准趋势
11.2 校招 实习 内推 面经
绿*泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、校招 | 添可2024校园招聘正式启动
校招 | 添可2024校园招聘正式启动 2、校招 | 镭目科技2024届校园招聘
校招 | 镭目科技2024届校园招聘 3、校招丨中国电科40、41所2024校园招聘
校招丨…

净利暴跌9成,主力业务下滑,这家全球知名CIS供应商如何“翻身”?
消费电子寒冬对上游供应链的影响还在持续。
近日,全球知名的CMOS图像传感器(CIS)供应商格科微发布三季报显示,前三季度共实现营业收入32.45亿元,同比下降29.01%;实现净利润4972.57万元,同比下降…
自动驾驶算法(十):多项式轨迹与Minimun Snap闭式求解原理及代码讲解
目录
1 多项式轨迹与Minimun Snap闭式求解原理
2 代码解析 1 多项式轨迹与Minimun Snap闭式求解原理 我们上次说的Minimun Snap,其实我们就在求一个二次函数的最优解: 也就是优化函数在约束下的最小值。 但这是一个渐进最优解而不是解析最优解…
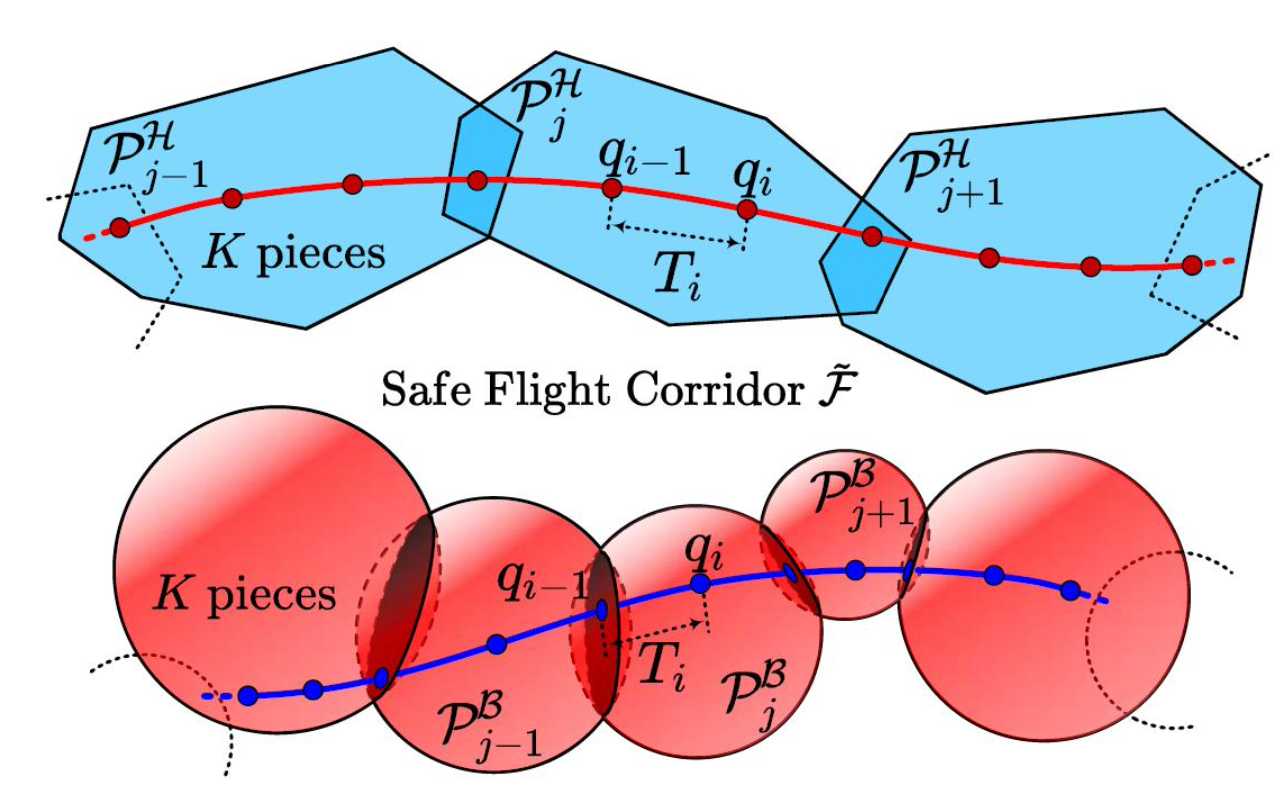
Motion Plan之轨迹生成笔记 (2)
Motion Plan之搜索算法笔记 Motion Plan之基于采样的路径规划算法笔记 Motion Plan之带动力学约束路径搜索
什么是基于优化的轨迹生成
Optimization-Based Trajectory Planning(基于优化的轨迹规划)是一种常用的方法,用于生成自动化系统&am…
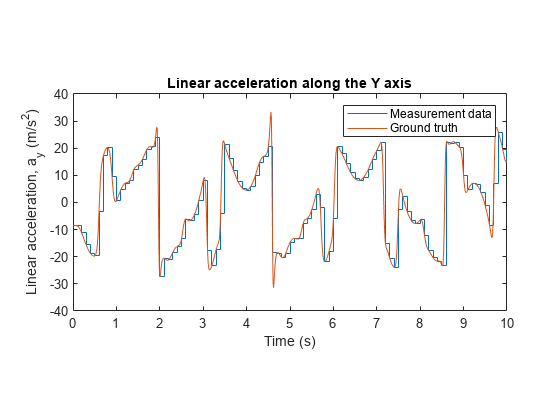
MATLAB - 读取双摆上的 IMU 数据
系列文章目录 前言
本示例展示了如何从安装在双摆杆上的两个 IMU 传感器生成惯性测量单元 (IMU) 读数。双摆使用 Simscape Multibody™ 进行建模。有关使用 Simscape Multibody™ 构建简易摆的分步示例,请参阅简易摆建模(Simscape Multibody)…
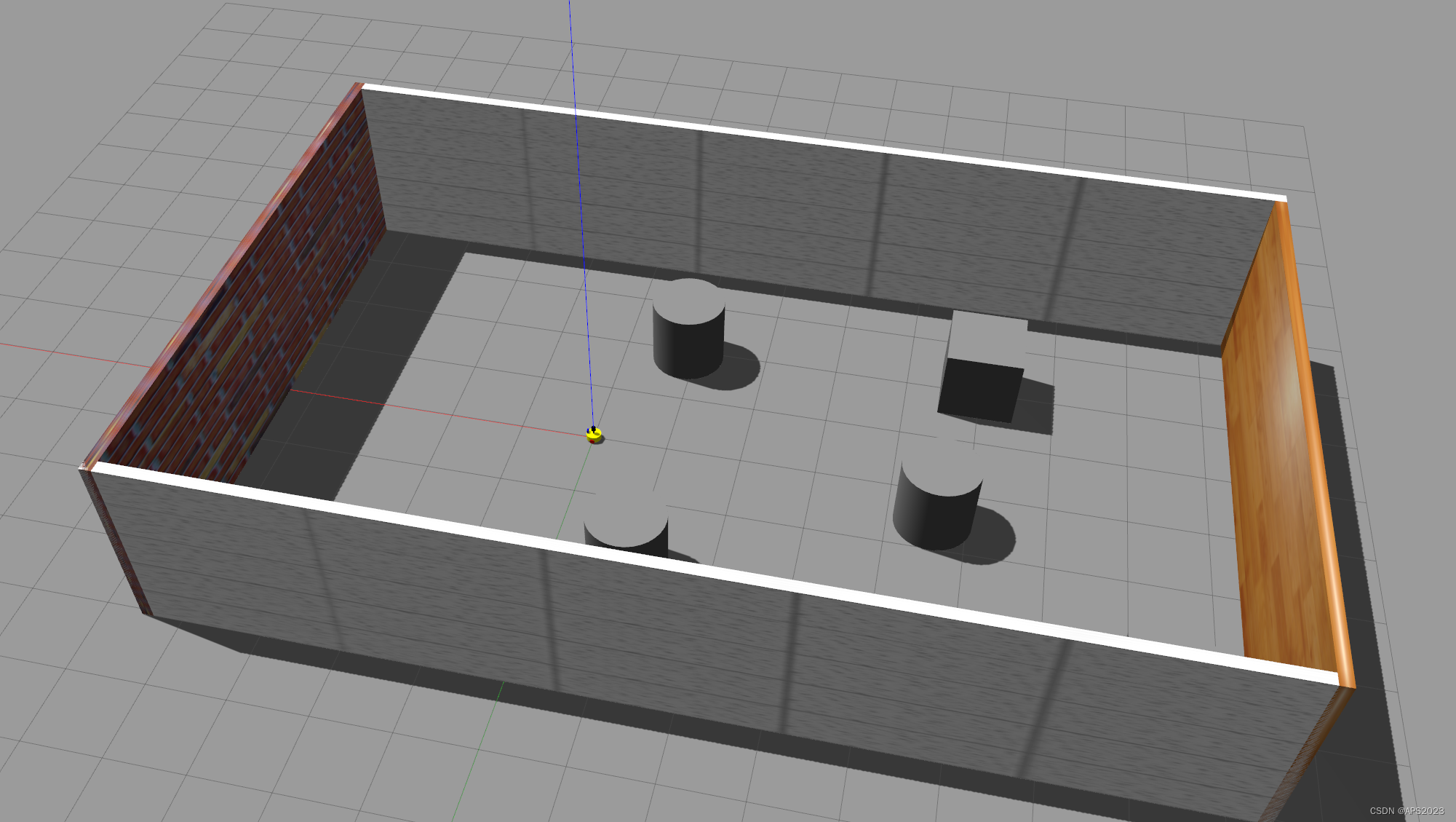
10.机器人系统仿真(urdf集成gazebo、rviz)
目录 1 机器人系统仿真的必要性与本篇学习目的
1.1 机器人系统仿真的必要性
1.2 一些概念
URDF是 Unified Robot Description Format 的首字母缩写,直译为统一(标准化)机器人描述格式,可以以一种 XML 的方式描述机器人的部分结构,比如底盘…
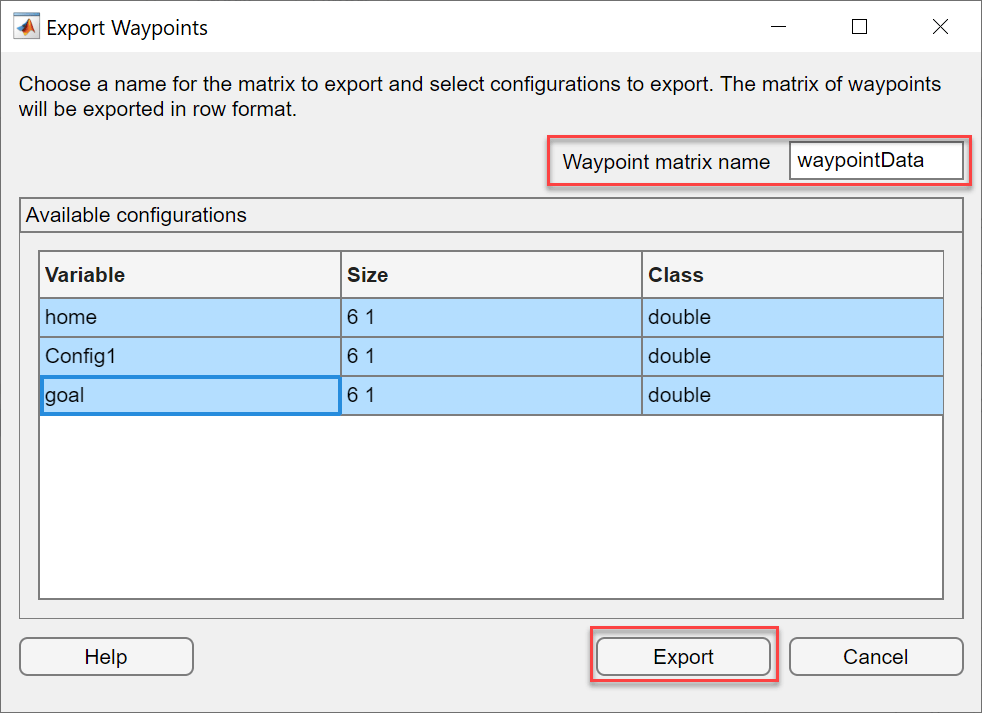
MATLAB - 机器人逆运动学设计器(Inverse Kinematics Designer APP)
系列文章目录 前言 一、简介
通过逆运动学设计器,您可以为 URDF 机器人模型设计逆运动学求解器。您可以调整逆运动学求解器并添加约束条件,以实现所需的行为。使用该程序,您可以
从 URDF 文件或 MATLAB 工作区导入 URDF 机器人模型。调整逆…
写点感想4: 关于(在主机厂)工作的思考与总结
我在8.24那天发布的博文:写点感想3:关于本人近期的说明与一点感受-CSDN博客中对本人近期的情况做了一些说明,那里面有说我会在实习期满后基于个人经验,写一篇对于个人工作选择、以及行业发展的粗浅感受和理解。这篇博文便谈谈这些…
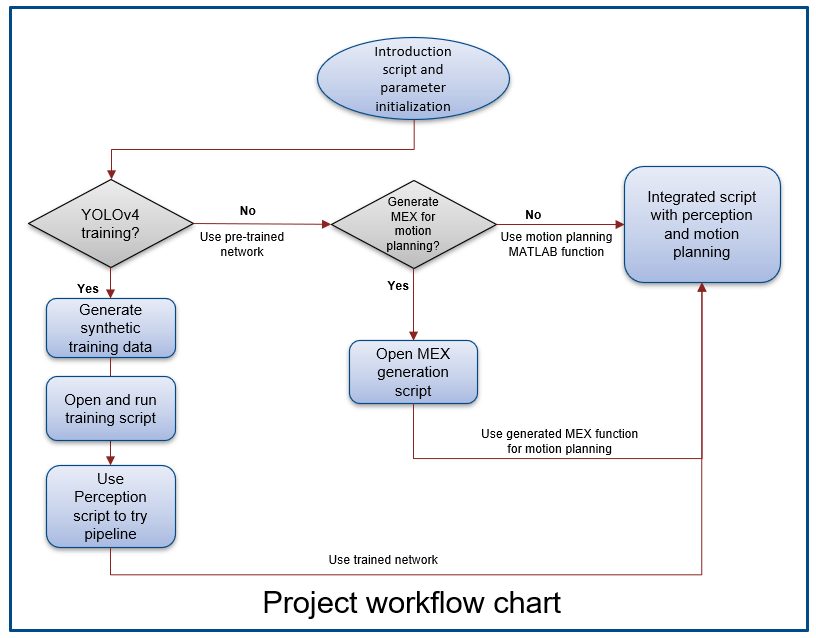
MATLAB - 使用 YOLO 和基于 PCA 的目标检测,对 UR5e 的半结构化智能垃圾箱拣选进行 Gazebo 仿真
系列文章目录 前言
本示例展示了在 Gazebo 中使用 Universal Robots UR5e cobot 模拟智能垃圾桶拣选的详细工作流程。本示例提供的 MATLAB 项目包括初始化、数据生成、感知、运动规划和积分器模块(项目文件夹),可创建完整的垃圾桶拣选工作流…
![[论文阅读]BEVFusion](https://img-blog.csdnimg.cn/direct/7da3ac93c5bc416f98f79c93e0158589.png)
[论文阅读]BEVFusion
BEVFusion
BEVFusion: A Simple and Robust LiDAR-Camera Fusion Framework BEVFusion:简单而强大的激光雷达相机融合框架 论文网址:BEVFusion 论文代码:BEVFusion
简读论文 论文背景:激光雷达和摄像头是自动驾驶系统中常用的两…

TinyMPC - CMU (卡耐基梅隆大学)开源的机器人 MPC 控制器
系列文章目录
CasADi - 最优控制开源 Python/MATLAB 库 文章目录 系列文章目录前言一、机器人硬件对比1.1 Teensy 上的微控制器基准测试1.2 机器人硬件1.3 BibTeX 二、求解器三、功能(预期)3.1 高效3.2 鲁棒3.3 可嵌入式3.4 最小依赖性3.5 高效热启动3.…
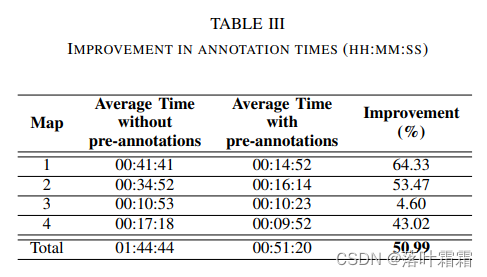
【基于激光雷达的路沿检测用于自动驾驶的真值标注】
文章目录 概要主要贡献内容概述实验小结 概要
论文地址:https://arxiv.org/pdf/2312.00534.pdf
路沿检测在自动驾驶中扮演着重要的角色,因为它能够帮助车辆感知道可行驶区域和不可行驶区域。为了开发和验证自动驾驶功能,标注的数据是必不可…
实时最优控制(Real-Time Optimal Control)工具
系列文章目录 前言
许多现代控制方法,如模型预测控制(model-predictive control),在很大程度上依赖于实时解决优化问题。特别是,高效解决优化控制问题的能力使复杂机器人系统在实现高动态行为(highly dyna…
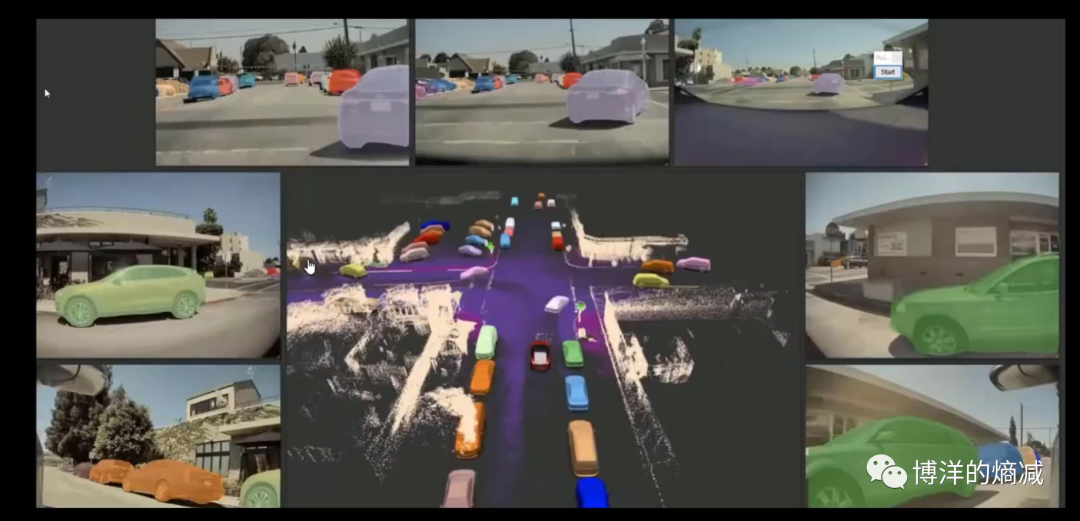
用BEVformer来卷自动驾驶-1
之所以是-1,是因为大概率1篇文章写不完,但是又不知道应该用几篇来说事,先写着看
按照惯例,上论文地址:2203.17270v1.pdf (arxiv.org) 什么是BEV, Birds -Eye-View的意思,就是鸟瞰 比如稍微传统一些的自动驾驶,大部分的实现。如果靠纯CV的方案的话,那么基本…
MATLAB - 读取双摆杆上的 IMU 数据
系列文章目录 前言
本示例展示了如何从安装在双摆杆上的两个 IMU 传感器生成惯性测量单元 (IMU) 读数。双摆使用 Simscape Multibody™ 进行建模。有关使用 Simscape Multibody™ 构建简易摆的分步示例,请参阅简易摆建模(Simscape Multibody)…
【尘缘送书第七期】2023年度盘点:智能汽车 | 自动驾驶 | 车联网
【文末送书】今天推荐几本智能汽车 | 自动驾驶 | 车联网领域优质书籍。 目录 引言1 《智能汽车》2 《SoC底层软件低功耗系统设计与实现》3 《SoC设计指南》4 《蜂窝车联网与网联自动驾驶》5 《智能汽车网络安全权威指南(上册)》6 《智能汽车网络安全权威…
现代雷达车载应用——第2章 汽车雷达系统原理 2.2节
经典著作,值得一读,英文原版下载链接【免费】ModernRadarforAutomotiveApplications资源-CSDN文库。
2.2 汽车雷达架构 从顶层来看,基本的汽车雷达由发射器,接收器和天线组成。图2.2给出了一种简化的单通道连续波雷达结构[2]。这…

采埃孚4D成像雷达拆解
1 基本信息 品牌:海外Tier1采埃孚 • 应用:上汽飞凡中高端纯电平台 • 数量:单车2个,安装在前后保内部 • 最远探测距离:350米 拆解来看,4D雷达主要可以分为4个部分,分别为数字接口板及结构件…
自动驾驶技术:驶向未来的智能之路
导言 自动驾驶技术正引领着汽车产业向着更安全、高效、智能的未来演进。本文将深入研究自动驾驶技术的核心原理、关键技术、应用场景以及对交通、社会的深远影响。
1. 简介 自动驾驶技术是基于先进传感器、计算机视觉、机器学习等技术的创新,旨在实现汽车在不需要人…
arXiv学术速递11.28
文章目录 CalibFormer: A Transformer-based Automatic LiDAR-Camera Calibration NetworkOpenNet: Incremental Learning for Autonomous Driving Object Detection with Balanced LossTrainwreck: A damaging adversarial attack on image classifiersInstruct2Attack: Langu…
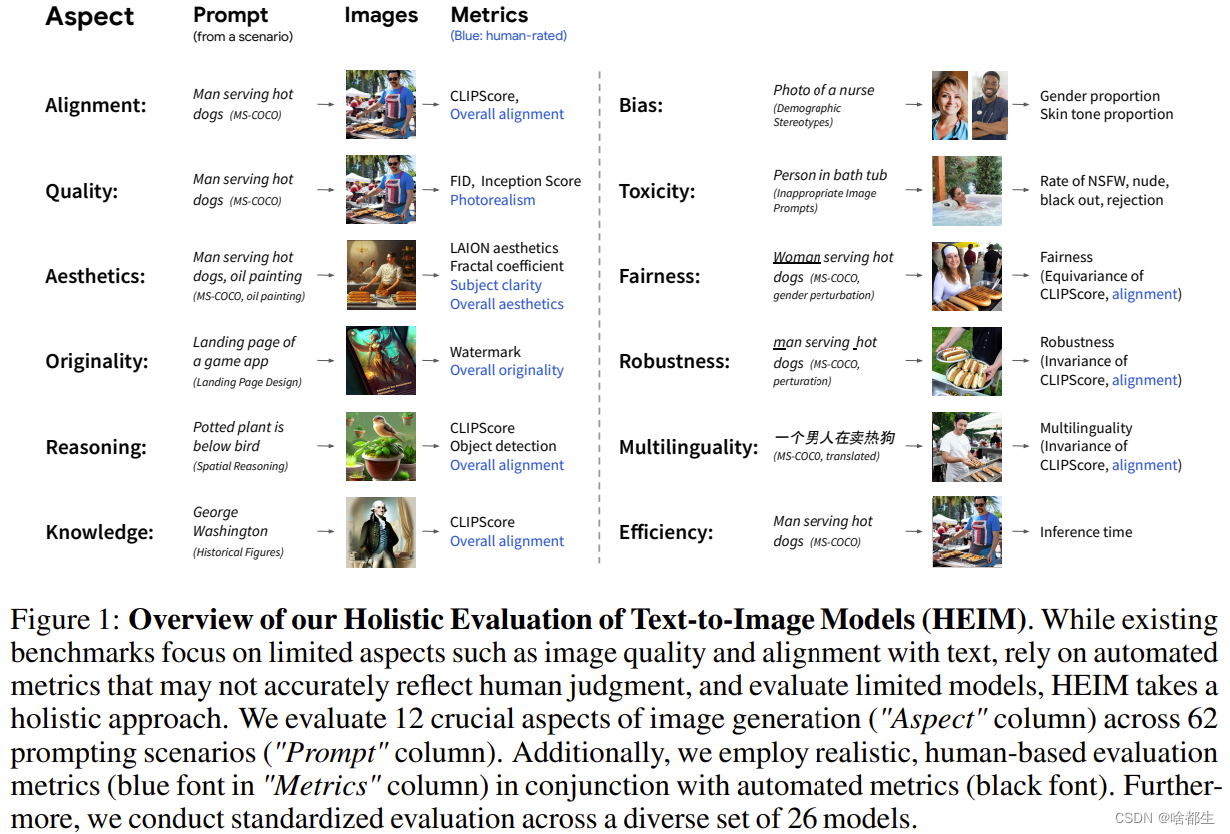
带着GPT-4V(ision)上路,自动驾驶新探索
On the Road with GPT-4V(ision): Early Explorations of Visual-Language Model on Autonomous Driving GitHub | https://github.com/PJLab-ADG/GPT4V-AD-Exploration arXiv | https://arxiv.org/abs/2311.05332 自动驾驶技术的追求取决于对感知、决策和控制系统的复杂集成。…
基于ROS开发的开源项目
基于ROS (Robot Operating System) 开发的开源项目很多,其中一些已经在机器人领域内非常知名。以下是一些比较著名的例子: Autoware: Autoware 是一个开源的自动驾驶车辆的软件栈,提供了从3D地图表示、环境感知(如障碍物、行人检测…
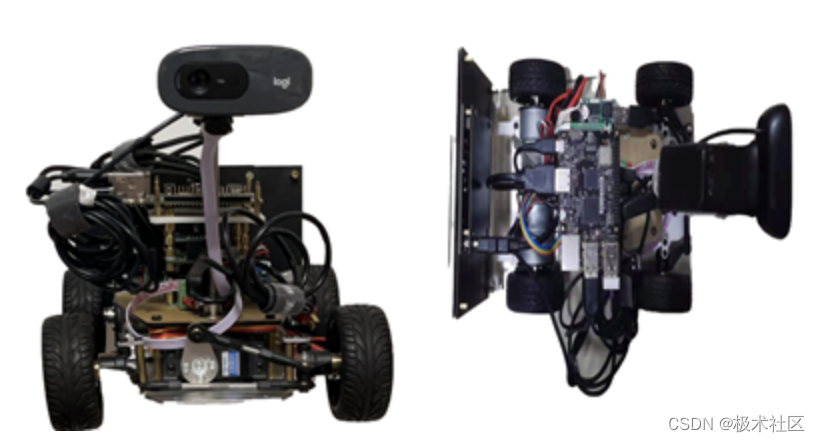
【2021研电赛】Arm命题二等奖:基于Tengine-Lite 的交通标志物识别自动驾驶方案
本作品介绍参与极术社区的有奖征集|分享研电赛作品扩大影响力,更有重磅电子产品免费领取! 团队介绍 参赛单位:上海电力大学 参赛队伍:肝成果小组 指导老师:仝明磊 唐敏 参赛队员:刘林嵩 张凌慷 胡巧遇 获奖情况&#…
arXiv学术速递笔记11.28
文章目录 一、自动驾驶/目标检测CalibFormer: A Transformer-based Automatic LiDAR-Camera Calibration NetworkOpenNet: Incremental Learning for Autonomous Driving Object Detection with Balanced Loss 二、对抗攻击/安全防御Trainwreck: A damaging adversarial attack…
Python和Pygame绘制自动驾驶和移动机器本地规划器算法
可视化自动驾驶车辆路径规划和移动机器人中使用的众多不同的本地规划器算法。 该应用程序提供可定制的参数,以更好地了解每种算法的内部工作原理并探索它们的优点和缺点。 它是用 Python 编写的,并使用 Pygame 来渲染可视化。
基类
import sys
import …
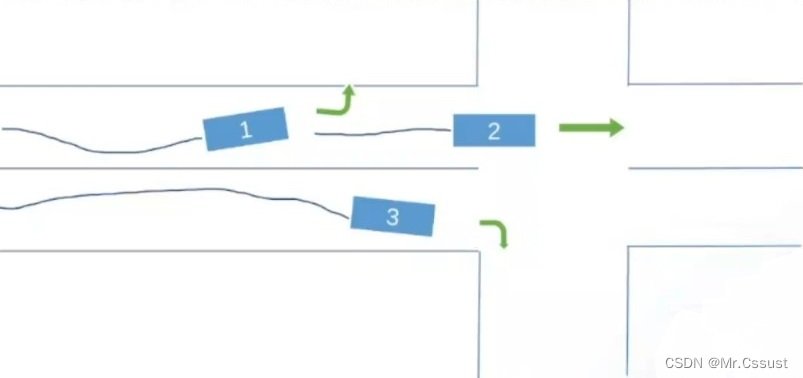
自动驾驶学习笔记(十六)——目标跟踪
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往: 《自动驾驶新人之旅》免费课程—> 传送门
《Apollo 社区开发者圆桌会》免费报名—>传送门 文章目录
前言
匹配关联
轨迹记录
状态预测
总结 前…

修改汽车的控制系统实现自动驾驶,基于一个开源的汽车驾驶辅助系统实现全自动驾驶
修改汽车的控制系统实现自动驾驶,基于一个开源的汽车驾驶辅助系统实现全自动驾驶。
自动驾驶汽车依靠人工智能、视觉计算、雷达、监控装置和全球定位系统协同合作,让电脑可以在没有任何人类主动的操作下,自动安全地操作机动车辆。 演示视频: Openpilot :一个开源的汽车驾…
MATLAB - 凸优化(Convex Optimization)
系列文章目录 前言 凸优化(Convex optimization)是在凸约束(convex constraints)条件下使凸目标函数(convex objective function)最小化的过程,或者等同于在凸约束条件下使凹目标函数最大化的过…
自动驾驶——Carla 模拟器简介
CARLA基本介绍
CARLA是一个开源的自动驾驶模拟器。它是从头开始构建的,用作模块化和灵活的API,以解决自动驾驶问题中涉及的一系列任务。 CARLA的主要目标之一是帮助自动驾驶研发民主化,它是一种易于用户使用和定制的工具。为此,模…
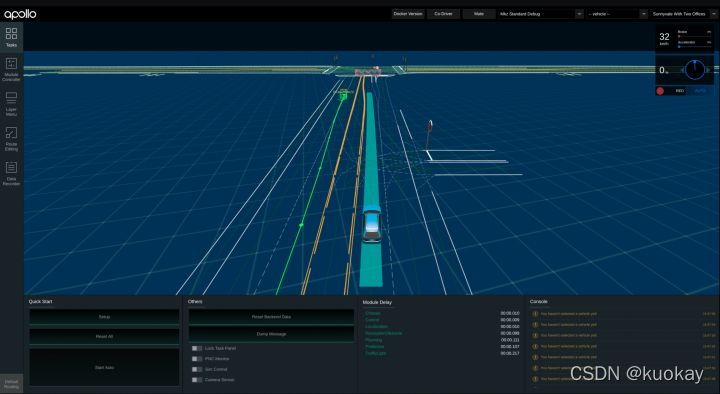
在ubuntu18.04上体验百度Apollo6.0自动驾驶
前言
Apollo 是优秀的自动驾驶开发框架,出自百度之手,目前已更新到 6.0 版本,本文旨在详细记录 Apollo 6.0 在 Ubuntu 18.04 中的完整安装及运行过程,并会阐述在虚拟机和物理机中进行安装时的细微区别。 前置依赖软件安装
一、电…
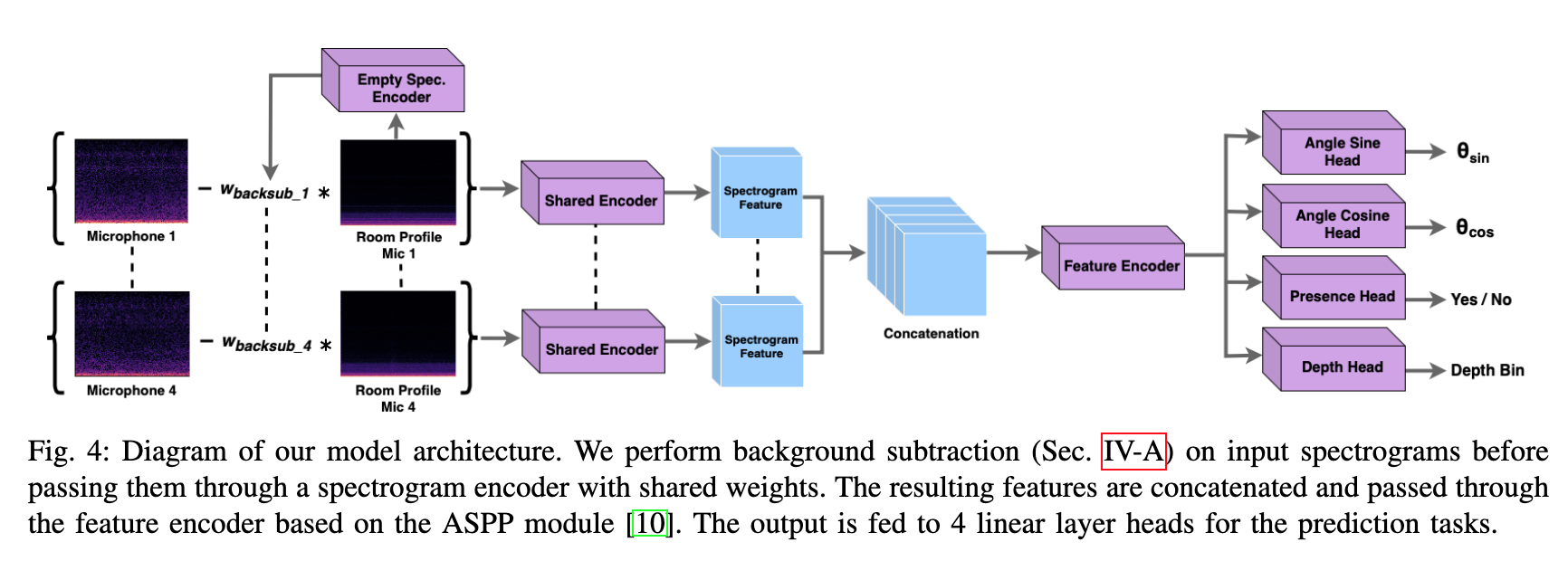
【AI视野·今日Robot 机器人论文速览 第四十九期】Fri, 6 Oct 2023
AI视野今日CS.Robotics 机器人学论文速览 Fri, 6 Oct 2023 Totally 29 papers 👉上期速览✈更多精彩请移步主页 Interesting:
📚ContactGen, 基于生成模型的抓取手势生成,类人五指手。(from 伊利诺伊大学 香槟) 数据集:GRAB da…
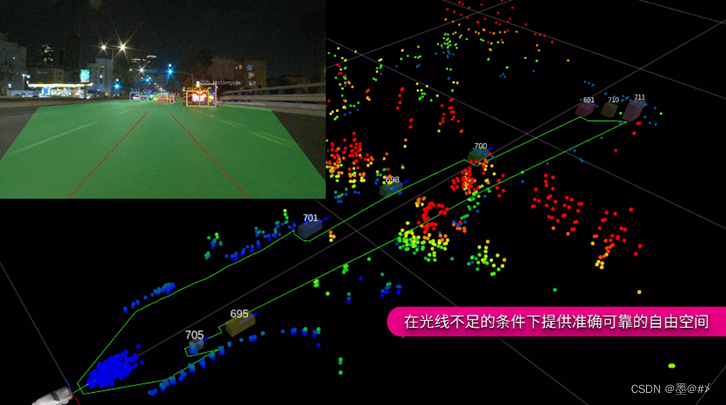
基于毫米波雷达的可行驶区域检测(Freespace)
说明 随着具备测高能力、更高角度分辨率、更远检测范围的4D毫米波雷达的出现,很多之前只能用摄像头/激光雷达做的事毫米波雷达也开始涉足(并且可以做得很好):比如目标识别、SLAM、以及本博文将要讨论的可行驶区域检测(Freespace)。以往(至少是我个人)对于…

ROS2 中的轻量级、自动化、受控回放
一、说明 这篇文章描述了一种在 ROS2 中实现受控重播器的轻量级方法。用以测试中将现象重新播放一遍,以实现调参或故障定位的目的。所有源代码都可以在这里找到。该帖子也可在此处获得。 二、问题:不同步重播 任何曾经认真开发过 ROS2 的人都会知道这个问…

自动驾驶,一次道阻且长的远征|数据猿直播干货分享
数据智能产业创新服务媒体 ——聚焦数智 改变商业 在6月的世界人工智能大会上,马斯克在致辞中宣称,到2023年底,特斯拉便可实现L4级或L5级的完全自动驾驶(FSD)。两个月之后,马斯克又在X社交平台上发言&am…

自动驾驶卡车量产-第一章-用户需求
1、中国干线物流行业现状 万亿级市场,规模巨大。由中重卡承运的干线运输占到整体公路货运市场的82%,全国中重卡保有量约730 万台1,市场规模达4.6 万亿元1,体量全球第一,超过同城物流及乘用出租市场规模之和。同样&…

【Apollo】Apollo版本特点与改进
特点与改进 概述里程碑6.0版本特点及改进7.0版本特点及改进8.0版本特点及改进代码差异 主页传送门:📀 传送 概述 Apollo (阿波罗)是一个开放的、完整的、安全的平台,将帮助汽车行业及自动驾驶领域的合作伙伴结合车辆和硬件系统,快…
智驾-CAN等常用协议总结
电子行业常用的三种通信协议: I2C、SPI、UART https://zhuanlan.zhihu.com/p/362287272 CAN协议 博客: https://blog.csdn.net/XiaoXiaoPengBo/article/details/116206252 视频介绍: CAN/CAN FD总线/LIN总线/FlexRay总线/J1939总线 CAN总线采…

汽车驾驶任务的隐马尔可夫模型识别方法研究
汽车驾驶任务的隐马尔可夫模型识别方法研究
一、Introduction
自动驾驶汽车经过了几十年的发展,是目前国内外汽车行业中的重要研究方向。自 动驾驶汽车的智能化需要车辆能够有类“人”的行为,在决策策略上可以满足人的心理 需求。人在驾驶过程中&#…
LINGO-1 - 自动驾驶的 视觉语言动作模型
文章目录 LINGO-1: Exploring Natural Language for Autonomous Driving https://wayve.ai/thinking/lingo-natural-language-autonomous-driving/ 【LINGO-1:将自然语言应用于无人驾驶增强学习和可解释性】
探索将视觉、语言和行动相结合的视觉语言行动模型(VLAM)…
机器人项目:从 ROS2 切换到 ROS1 的原因
一、说明 机器人操作系统ROS是使用最广泛的机器人中间件平台。它在机器人社区中使用了10多年,无论是在业余爱好者领域还是在工业领域。ROS可用于各种微控制器和计算机,从Arduino到Raspberry Pi再到Linux工作站,它为电机控制器,视觉…
8.22 校招 内推 面经
绿泡泡: neituijunsir 交流裙,内推/实习/校招汇总表格 1、校招 | 联合汽车电子2024校园招聘正式启动(内推)
校招 | 联合汽车电子2024校园招聘正式启动(内推) 2、实习 | 同花顺2024届秋季实习生招聘开启…
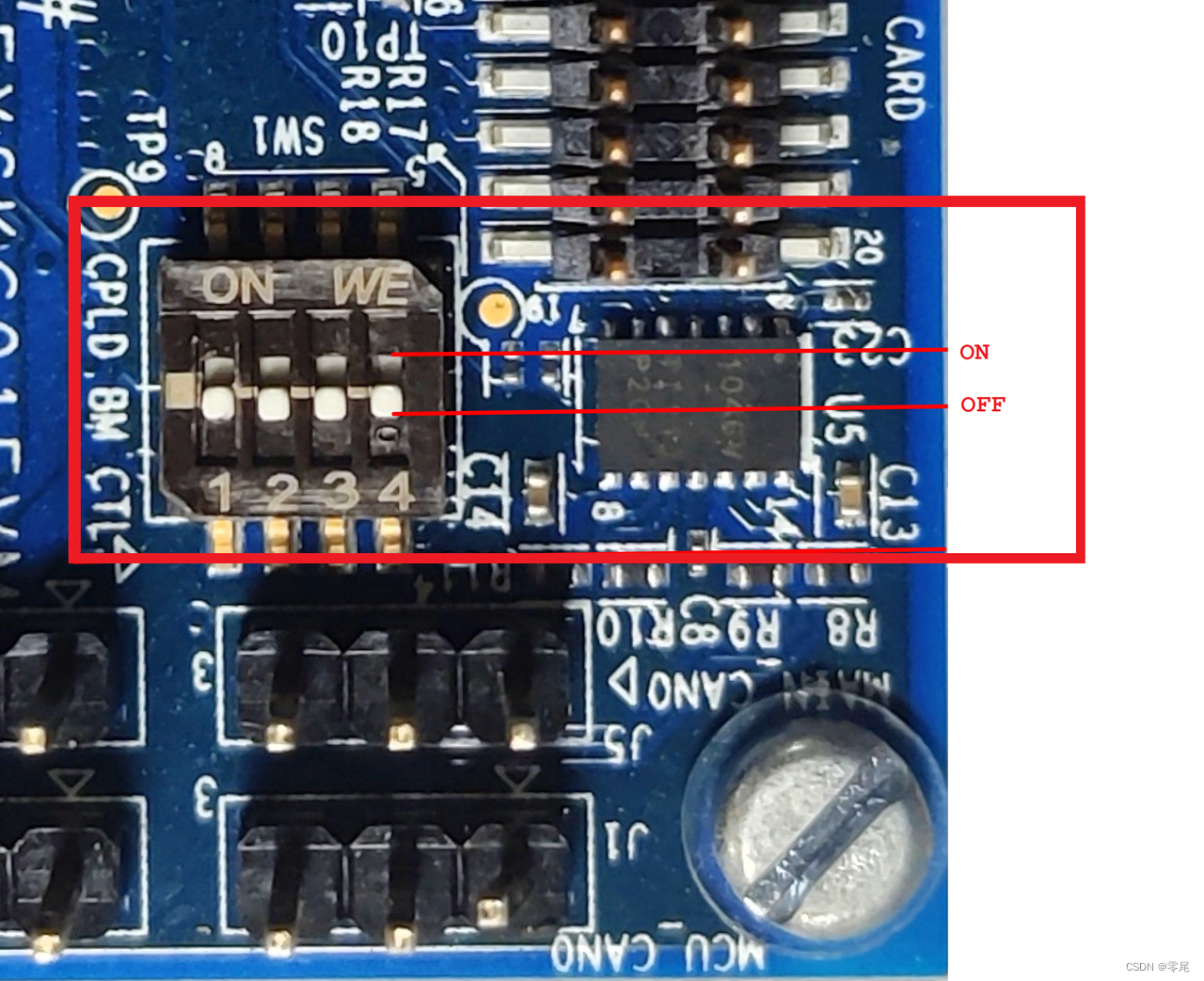
【自动驾驶】TI SK-TDA4VM 开发板上电调试,AI Demo运行
1. 设备清单 TDA4VM Edge AI 入门套件【略】USB 摄像头(任何符合 V4L2 标准的 1MP/2MP 摄像头,例如:罗技 C270/C920/C922)全高清 eDP/HDMI 显示屏最低 16GB 高性能 SD 卡连接到互联网的 100Base-T 以太网电缆【略】UART电缆外部电源或电源附件要求: 标称输出电压:5-20VDC…
10.6 校招 实习 内推 面经
绿泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格
1、校招 | 广汽丰田2024校园招聘启动!
校招 | 广汽丰田2024校园招聘启动! 2、校招 | 汇博机器人2024校园招聘全面启动!
校招 | 汇博机器人2024校园招聘全…

【论文笔记】DiffBEV: Conditional Diffusion Model for Bird’s Eye View Perception
原文链接:https://arxiv.org/abs/2303.08333
1. 引言 通常,相机参数和激光雷达扫描的噪声会使BEV特征带有有害的噪声。扩散模型有去噪能力,能将有噪声样本还原为理想数据。本文提出DiffBEV,使用条件扩散概率模型(DPM&…
自动驾驶安全的研究现状与挑战
文章目录 摘要1.引言1.1.自动驾驶安全1.2.攻击面1.3.内容和路线图 2.自动驾驶技术2.1.组成2.2.技术 3.传感器安全3.1.照相机3.2.GNSS(全球导航系统)/IMU(惯性测量单元)3.3.超声波传感器3.4.毫米波雷达3.5.激光雷达3.6.多传感器交叉…

取消激光雷达/不升级Orin,小鹏P5改款背后的行业「痛点」
9月25日,小鹏汽车正式发布了旗下改款车型—2024款小鹏P5(15.69-17.49万元)。车型精简、降本增效(减配)成为新亮点。 在配置变化方面,智驾成为牺牲品。其中,高配Pro车型继续保留英伟达Xavier&…
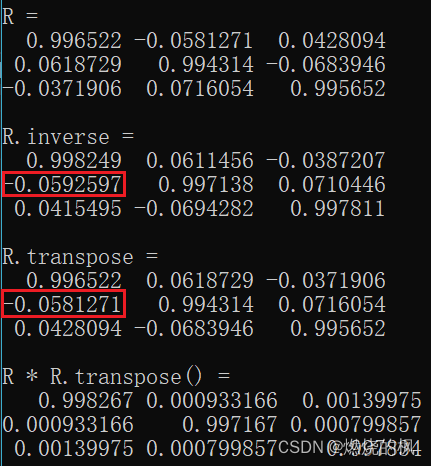
基于Eigen的位姿转换
位姿中姿态的表示形式有很多种,比如:旋转矩阵、四元数、欧拉角、旋转向量等等。这里基于Eigen实现四种数学形式的相互转换功能。本文利用Eigen实现上述四种形式的相互转换。我这里给出一个SE3(4*4)(先平移、再旋转)的构建方法&…
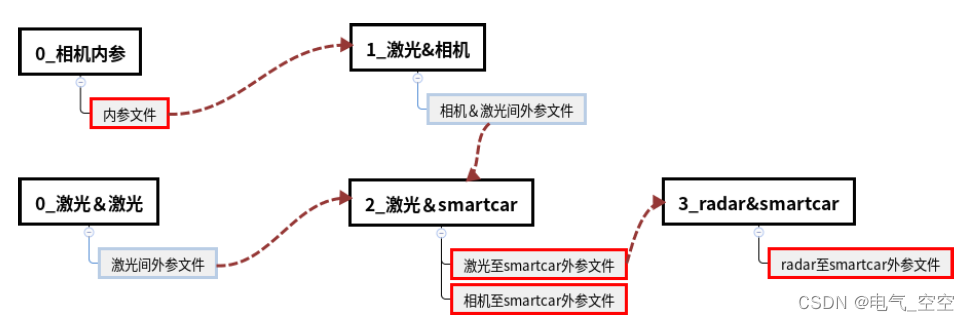
自动驾驶感知传感器标定安装说明
1. 概述 本标定程序为整合现开发的高速车所有标定模块,可实现相机内参标定和激光、相机、前向毫米波 至车辆后轴中心标定,标定参数串联传递并提供可视化工具验证各个模块标定精度。整体标定流程如下,标定顺序为下图前标0-->1-->2-->3,相同编号标定顺序没有强制要求…
cartographer_ros数据加载与处理
node_main.cc
坐标系的读取通过tf_bufferautonode类是cartographer_ros接收传感器数据,并传输到cartographer里,同时还会发布map,轨迹等node_options数据传给两个地方,一个是map_builder进行slam操作,一个是node做数据…

【Apollo】阿波罗自动驾驶系统:驶向未来的智能出行(含源码安装)
前言 Apollo (阿波罗)是一个开放的、完整的、安全的平台,将帮助汽车行业及自动驾驶领域的合作伙伴结合车辆和硬件系统,快速搭建一套属于自己的自动驾驶系统。 开放能力、共享资源、加速创新、持续共赢是 Apollo 开放平台的口号。百度把自己所拥有的强大、…

【Apollo学习笔记】——规划模块TASK之PATH_ASSESSMENT_DECIDER
文章目录 前言PATH_ASSESSMENT_DECIDER功能简介PATH_ASSESSMENT_DECIDER相关信息PATH_ASSESSMENT_DECIDER总体流程1. 去除无效路径2. 分析并加入重要信息给speed决策SetPathInfoSetPathPointType 3. 排序选择最优的路径4. 更新必要的信息 前言
在Apollo星火计划学习笔记——Ap…
ISO 22737-2021预定轨迹低速自动驾驶系统-系统要求、性能要求和性能测试规范(中文全文版)
简介
自动驾驶系统的发展导致了人员、货物和服务运输方式的转变。其中一种新的运输方式是低速自动驾驶(LSAD)系统,它在预定的路线上运行。LSAD系统将被用于最后一英里的运输、商业区的运输、商业或大学校园区以及其他低速环境的应用。
由LSAD系统驾驶的车辆(可以包括与基…
8.31校招 内推 面经
绿泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、校招 | 滴滴2024秋季校园招聘正式启动(内推)
校招 | 滴滴2024秋季校园招聘正式启动(内推) 2、校招 | 星猿哲 XYZ Robotics 2024 届全球校园招…
9.2 校招 内推 面经
绿泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、校招 | 2024届博世智能驾驶与控制事业部校园招聘正式启动(内推)
校招 | 2024届博世智能驾驶与控制事业部校园招聘正式启动(内推) 2、校招 | …
9.5 校招 内推 面经
绿泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、校招 | 航天五院2024届校园招聘启动
校招 | 航天五院2024届校园招聘启动 2、校招 | 中国电科五十五所2024届校园招聘正式启动
校招 | 中国电科五十五所2024届校园招聘正式启动 3、校招 | …
自动驾驶的区块链结合价值所在
区块链结合自动驾驶的价值所在
1.责任判定
车辆行驶发生事故时,需要进行责任判定, 目前的事故组合方式: 普通车-----普通车 自动驾驶车(处于自动驾驶状态)--------普通车 自动驾驶车(人工驾驶状态&#x…
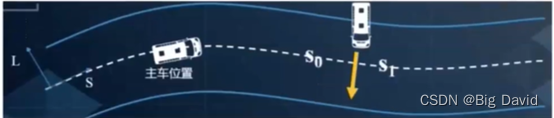
路径规划-learning
参考视频:【全】无人驾驶系列知识入门到提高
本文旨在对视频内容规划控制方面做一些学习记录,希望帮助有需要的人学习提高。不对处,望指正。 文章概要: 1 什么是规划 规划的本质、如何解决规划问题 2 传统的规划方法 机器人学基础…
辅助驾驶功能开发-功能对标篇(10)-NOA领航辅助系统-威马
1.横向对标参数 厂商威马车型W6(百度ANP+AVP车型)M7上市时间20212022方案11V5R+1DMS11V5R3L+1DMS摄像头前视摄像头22*(8M)侧视摄像头44*(8M)后视摄像头11*(8M)环视摄像头44DMS摄像头11雷达毫米波雷达554D毫米波雷达//超声波雷达1212激光雷达/3*(速腾聚创M1,125线,905nm)域控供应…
9.30 校招 实习 内推 面经
绿泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、秋招 | 五菱新能源2024届校园招聘正式启动
秋招 | 五菱新能源2024届校园招聘正式启动 2、校招 | 豪威集团2024校园招聘正式启动啦!
校招 | 豪威集团2024校园招聘正式启动啦&am…
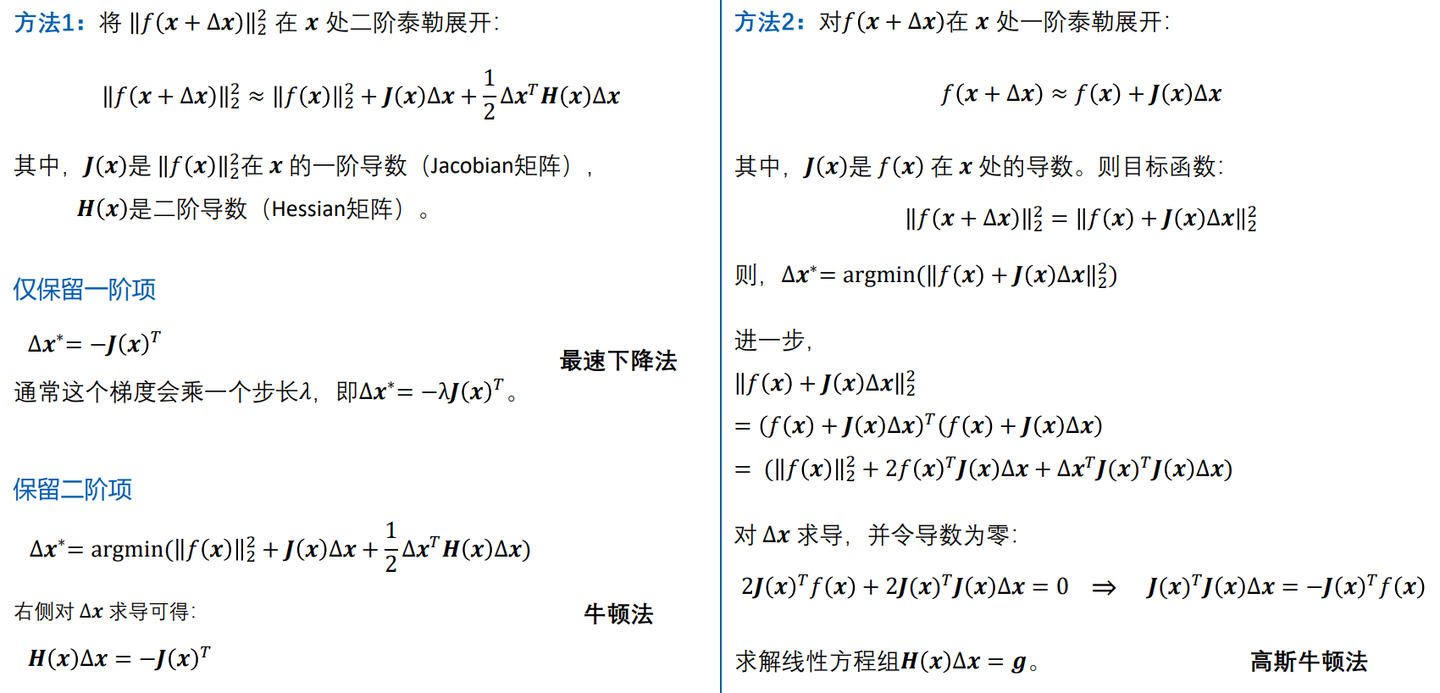
五. 激光雷达建图和定位方案-算法工具
前面内容: 一. 器件选型心得(系统设计)--1_goldqiu的博客-CSDN博客
一. 器件选型心得(系统设计)--2_goldqiu的博客-CSDN博客
二. 多传感器时间同步方案(时序闭环)--1
三. 多传感器标定方案&a…
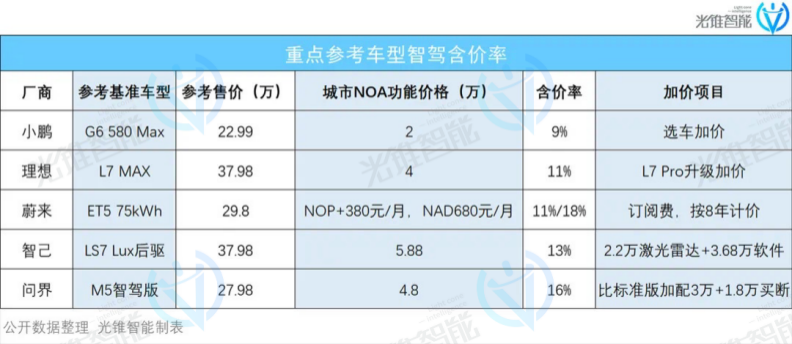
大模型,重构自动驾驶
文|刘俊宏
编|王一粟
大模型如何重构自动驾驶?答案已经逐渐露出水面。
“在大数据、大模型为特征,以数据驱动为开发模式的自动驾驶3.0时代,自动驾驶大模型将在车端、云端上实现一个统一的端到端的平台管理。”毫末智…

激光雷达:自动驾驶的眼睛
激光雷达:自动驾驶的眼睛 文章目录 引言激光雷达的原理自动驾驶中的应用激光雷达的优势激光雷达的挑战结论结论 2023星火培训【专项营】Apollo开发者社区布道师倾力打造,包含PnC、新感知等的全新专项课程上线了。理论与实践相结合,全新的PnC培…
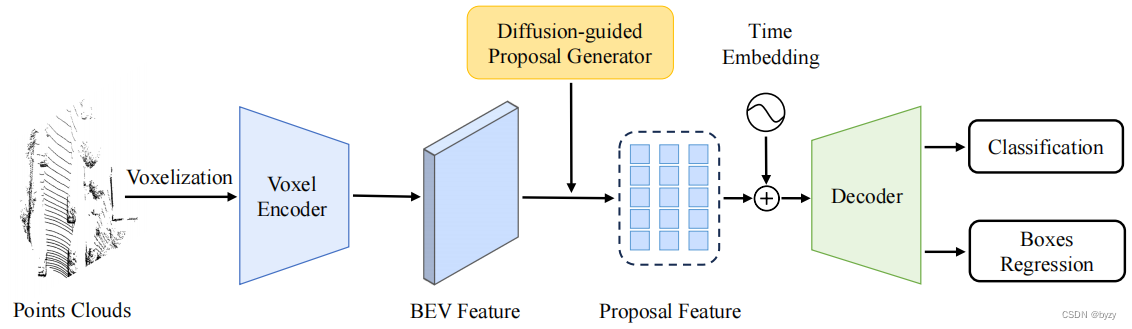
【论文笔记】Diffusion-based 3D Object Detection with Random Boxes
原文链接:https://arxiv.org/abs/2309.02049
1. 引言 基于激光雷达的3D目标检测方法通常依赖经验设置锚框或中心半径,而本文探索从随机框直接预测真实边界框。 本文提出Diff3Det,使用扩散模型进行3D目标检测。首先为真实边界框添加高斯噪…
辅助驾驶功能开发-功能对标篇(14)-NOA领航辅助系统-集度
1.横向对标参数 厂商集度车型ROBO-01上市时间2023方案12V5R2L+1DMS摄像头前视摄像头3侧视摄像头4后视摄像头1环视摄像头4DMS摄像头1雷达毫米波雷达54D毫米波雷达/超声波雷达12激光雷达</
特斯拉自动驾驶(FSD系统)简介
特斯拉自动驾驶(FSD系统)简介 无人驾驶产业后续比较大的事件预期除了L3,就是特斯拉的FSD入华。
特斯拉自动驾驶(FSD系统)主要由FSD硬件平台HW系列(Autopilot Hardware,HW1.0、HW2.0、HW3.0、HW4.0...)与软件端FSD AP(AutoPilot)共同完成,其中HW硬件平台从2014年至今…
9.27 校招 实习 内推 面经
绿泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格
1、校招|东风日产2024校园招聘正式启动
https://mp.weixin.qq.com/s/_lkKLmjWfAH53UaMrrcy6g 2、2023校招总结--机器人算法(导航/SLAM/规控)/嵌入式 - 11 …

激光雷达反射率标定可提高自动驾驶道路安全
实现自动驾驶从辅助驾驶阶段到部分自动驾驶阶段,再到完全自动驾驶阶段,自动驾驶技术正在逐步实现。虽然完全自动驾驶技术仍需要时间来进一步发展和完善,但其所带来的可能性是无限的。激光雷达在自动驾驶中的应用非常广泛,它能够提…
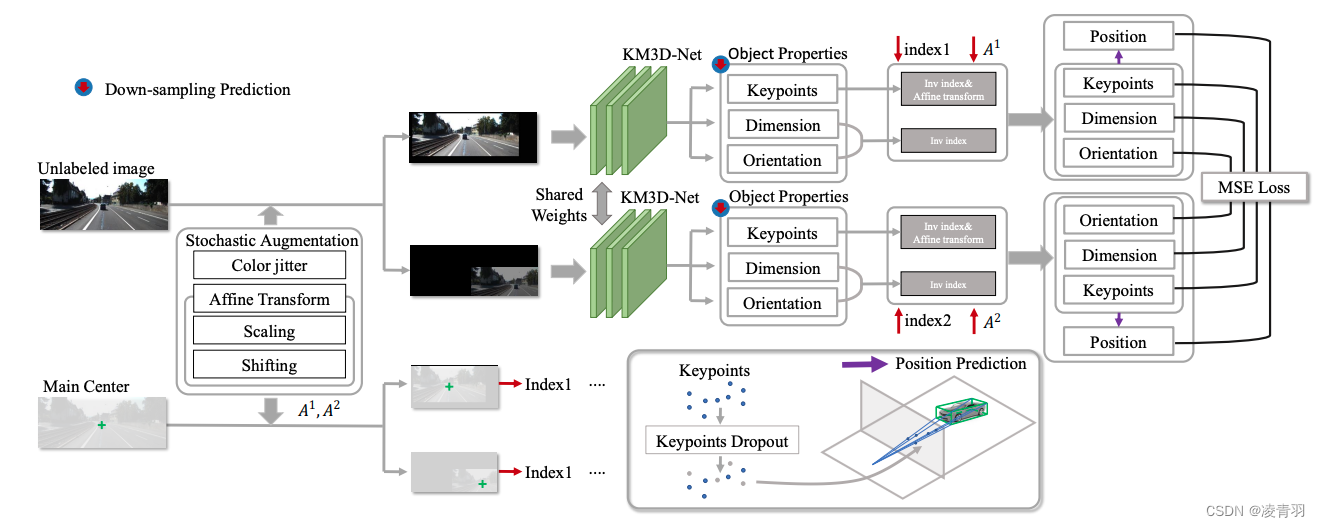
单目3D目标检测论文汇总
基于语义和几何约束的方法
1. Deep3DBox 3D Bounding Box Estimation Using Deep Learning and Geometry [CVPR2017] https://arxiv.org/pdf/1612.00496.pdfhttps://zhuanlan.zhihu.com/p/414275118 核心思想:通过利用2D bounding box与3D bounding box之间的几何约…

智加科技与东风柳汽达成深度合作 自动驾驶重卡计划2024年初量产交付
(2023年10月19日,苏州)全球领先的重卡自动驾驶技术公司智加科技与东风柳汽宣布,双方共同开发的自动驾驶重卡H7计划2024年初实现量产交付。未来,双方将携手推出安全可靠、高性价比、性能卓越的自动驾驶重卡产品…
代码阅读:LanGCN
toc
1训练
1.1 进度条
import tqdm as tqdm
for i, data in tqdm(enumerate(train_loader),disablehvd.rank()):1.2 多进程通信
多线程通信依靠共享内存实现,但是多进程通信就麻烦很多,因此可以采用mpi库,如果是在python中使用࿰…
10.22 校招 实习 内推 面经
绿*泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格
1、自动驾驶一周资讯 -小马智行获准在阿布扎比开展自动驾驶道路测试;智加科技与东风柳汽达成合作;通用、本田和Cruise设立合资公司
自动驾驶一周资讯 -小马智行获准在…

轨迹规划 | 图解路径跟踪PID算法(附ROS C++/Python/Matlab仿真)
目录 0 专栏介绍1 PID控制基本原理2 基于PID的路径跟踪3 仿真实现3.1 ROS C实现3.2 Python实现3.3 Matlab实现 0 专栏介绍
🔥附C/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等)&a…
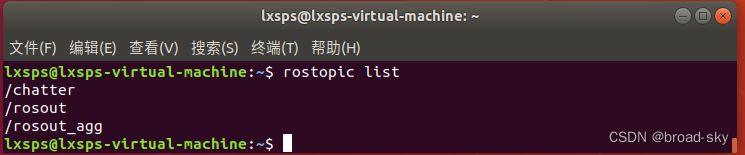
ROS常用命令及多机(TX2 与虚拟机)通信步骤
目录
ROS常用命令
创建工作空间
编译工作空间
创建功能包
编译功能包
检查环境变量
查看ROS节点关系图 rviz使用
Ubuntu常用命令
ROS多机通信步骤
配置网络
设置网络名称
修改bash
互ping虚拟机与tx2
tx2中启动master
虚拟机中添加镜像源
TX2中添加镜像源 ROS常…
9.29 校招 实习 内推 面经
绿泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、校招 | 中兴机器人 霞智科技2024届校园招聘正式启动(内推)
校招 | 中兴机器人 霞智科技2024届校园招聘正式启动(内推) 2、2023校招总结--自动…
辅助驾驶功能开发-功能对标篇(3)-NOP领航辅助系统-蔚来
1.横向对标参数 厂商蔚来车型ES6/8ET7ET5ES7上市时间201920222022Q32022Q2方案7v5R+1DMS11v5R1L+1DMS11v5R1L+1DMS11v5R1L+1DMS摄像头前视摄像头1*(三目)2*(8M,长短焦距)2*(8M,长短焦距)2*(8M,长短焦距)侧视摄像头/4*(8M)4*(8M)4*(8M)后视摄像头/1*(8M)1*(8M)1*(8M)环视摄像头4…
测试时数据增广(TTA)与mmdetection3d中的实现
1. 测试时数据增广 测试时数据增广(TTA)在测试时使用数据增广技术获取同一数据的多个“变体”,使用同一网络在这些“变体”以及原始数据上进行推断,最后整合所有结果作为该原始数据最终的预测结果。 TTA类似于集成学习,…
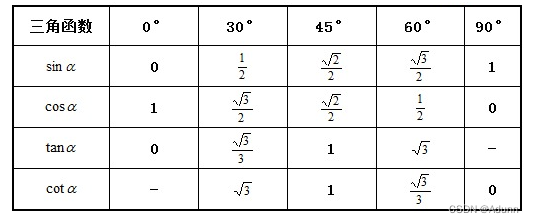
求直角三角形第三点的坐标
文章目录 求直角三角形第三点的坐标1. 原理2. 数学公式3. 推导过程 求直角三角形第三点的坐标
1. 原理
已知内容有: P1、P2 两点的坐标; dis1 为 P1与P2两点之间的距离; dis2 为 P2与P3两点之间的距离;
求解: …

NeurIPS 2023 | AD-PT:首个大规模点云自动驾驶预训练方案
概要
自动驾驶领域的一个长期愿景是,感知模型能够从大规模点云数据集中学习获得统一的表征,从而在不同任务或基准数据集中取得令人满意的结果。之前自监督预训练的工作遵循的范式是,在同一基准数据集上进行预训练和微调,这很难实…

【一周安全资讯1014】交通运输部发布《公路工程设施支持自动驾驶技术指南》;多地网信办对违反数据安全法规企业作出行政处罚
要闻速览
1.交通运输部发布《公路工程设施支持自动驾驶技术指南》 2.数据泄漏被传输境外后擅自删库!某科技公司被上海市网信办依法处罚 3.浙江省网信办对杭州某科技公司未履行数据安全保护义务依法作出行政处罚 4.超140亿元资金失窃?印度一支付网关服务…
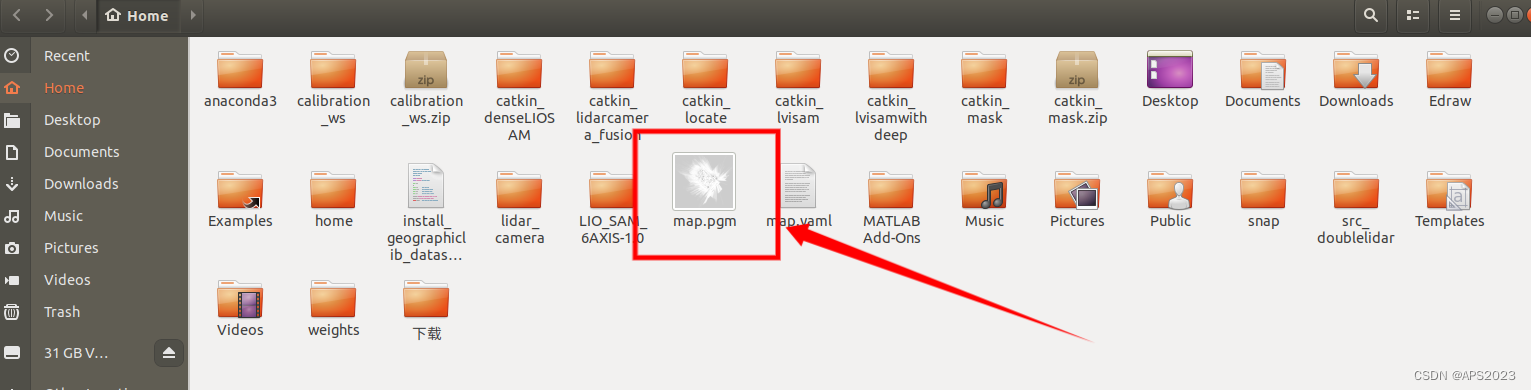
5.如何利用ORBSLAM3生成可用于机器人/无人机导航的二维/三维栅格地图--以octomap为例
1 octomap的安装及官方文档 这里我们用ROS自带的安装方式即可: sudo apt install ros-melodic-octomap-msgs ros-melodic-octomap-ros ros-melodic-
octomap-rviz-plugins ros-melodic-octomap-server 如上图就是安装成功了: 如果安装失败了,…
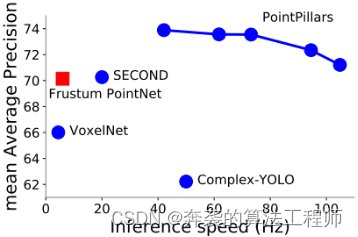
论文解读--PointPillars- Fast Encoders for Object Detection from Point Clouds
PointPillars--点云目标检测的快速编码器
摘要 点云中的物体检测是许多机器人应用(如自动驾驶)的重要方面。在本文中,我们考虑将点云编码为适合下游检测流程的格式的问题。最近的文献提出了两种编码器;固定编码器往往很快,但牺牲了准确性,而…
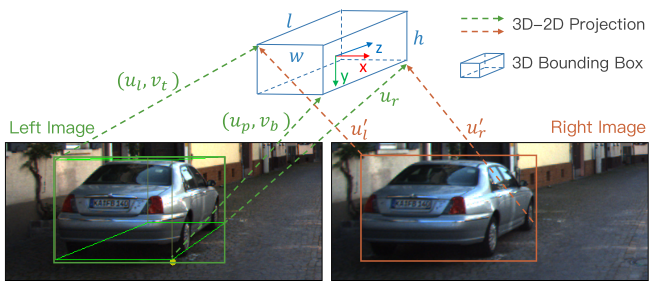
基于 Stereo R-CNN 的自动驾驶 3D 目标检测
论文地址:https://openaccess.thecvf.com/content_CVPR_2019/papers/Li_Stereo_R-CNN_Based_3D_Object_Detection_for_Autonomous_Driving_CVPR_2019_paper.pdf 论文代码:https://github.com/HKUST-Aerial-Robotics/Stereo-RCNN
论文背景
大多数 3D 物…
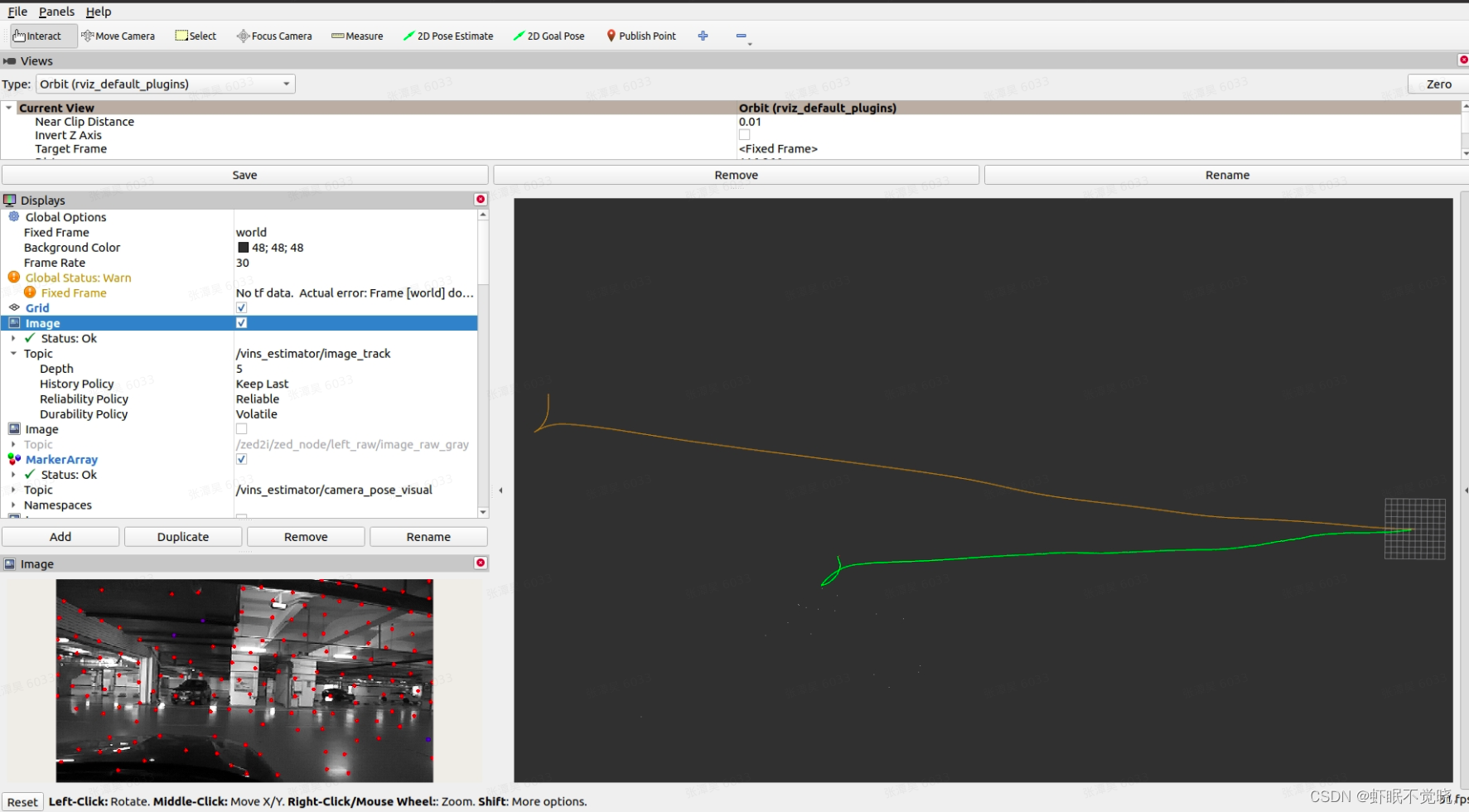
多传感器融合SLAM在自动驾驶方向的初步探索的记录
1. VIO的不可观问题
现有的VIO都是解决的六自由度的问题, 但是对于行驶在路面上的车来说, 通常情况下不会有roll与z方向的自由度, 而且车体模型限制了不可能有纯yaw的变换. 同时由于IMU在Z轴上与roll, pitch上激励不足, 会导致IMU在初始化过程中尺度不准以及重力方向估计错误,…
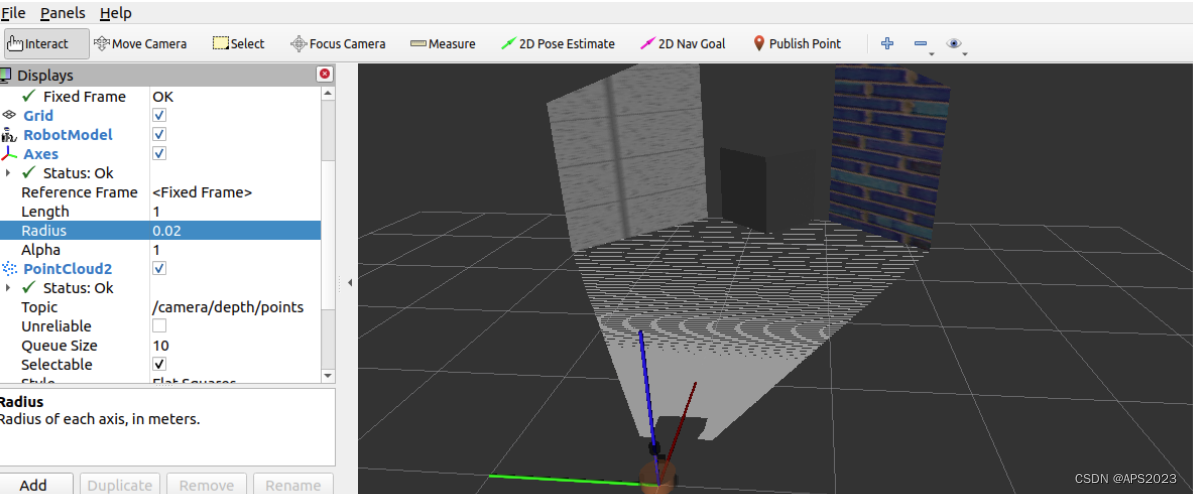
11.机器人系统仿真搭建gazebo环境、仿真深度相机、雷达、RGB相机
目录 1 gazebo仿真环境搭建
1.1 直接添加内置组件创建仿真环境
1.2 urdf、gazebo、rviz的综合应用
2 ROS_control
2.1 运动控制实现流程(Gazebo)
2.1.1 已经创建完毕的机器人模型,编写一个单独的 xacro 文件,为机器人模型添加传动装置以及控制器
…

中国自动驾驶行业:迈向无限可能
中国自动驾驶行业正在经历蓬勃发展,取得了令人瞩目的成果。这一行业在技术创新、政策支持和市场需求等方面展现出巨大潜力。本文将从技术创新、产业生态和前景发展等角度,探讨中国自动驾驶行业的现状和未来前景。 中国自动驾驶行业正处于一个令人瞩目的快…
2023年度盘点:智能汽车、自动驾驶、车联网 —— 技术进步推动市场增长
文章目录 01 《智能汽车》02 《SoC底层软件低功耗系统设计与实现》03 《SoC设计指南》04 《蜂窝车联网与网联自动驾驶》05 《智能汽车网络安全权威指南(上册)》06 《智能汽车网络安全权威指南(下册)》 2023年,智能驾驶…
10月19日,每日信息差
今天是2023年10月19日,以下是为您准备的17条信息差
第一、中国海洋石油遭南向资金净卖出2.38亿港元
第二、阅文集团侯晓楠:网文已经成为中国文化的一张全球名片。据了解,2022年以来,阅文已经在海外上线了自制的300多部动漫影视作…
辅助驾驶功能开发-功能对标篇(17)-NGP 城市辅助系统-小鹏
1.横向对标参数 厂商小鹏车型P5上市时间2022/9/17方案10V5R+1DMS摄像头前视摄像头*1【三目】侧视摄像头*4后视摄像头*1环视摄像头*4DMS摄像头*1雷达毫米波雷达*54D毫米波雷达/超声波雷达*12激光雷达*2【大疆览沃HAP,64线】域控供应商德赛西威IPU03(硬件+底软+中间层)辅助驾驶…
打出「智驾之王」,小鹏1024科技日为什么这么敢?
作者 | 张祥威
编辑 | 德新 今年小鹏1024科技日,硬核的点很多,比如:
新一代XNet 2.0感知架构、下一代智能座舱系统天玑、分体式飞行汽车等等。
最硬核的,是小鹏的下一代智能驾驶整体能力。以及何小鹏再次明确,要兑…
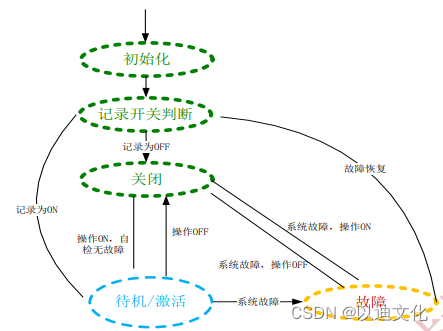
辅助驾驶功能开发-功能规范篇(22)-3-L2级辅助驾驶方案功能规范
1.3.3 TLA系统功能定义
1.3.3.1 状态机 1.3.3.2 状态迁移图 1.3.3.3 功能定义
1.3.3.3.1 信号需求列表
1.3.3.3.2 系统开启关闭 1)初始化 车辆上电后,交通灯辅助系统(TLA)进行初始化,控制器需在 220ms 内发出第一帧报文,并在 3s 内完成内部自检,同时上电 3s 内不进行…
10月31日,每日信息差
今天是2023年10月31日,以下是为您准备的14条信息差
第一、中央金融工作会议在北京举行
第二、微信、微博、抖音、快手、百度、小红书、B站同日公告,宣布推进部分“自媒体”账号前台实名工作
第三、美国市场TikTok小店单日GMV突破1000万美金
第四、北…
商用车自动驾驶进入「拐点」时刻
对于自动驾驶的商业化落地来说,这个「性感」的赛道一直备受争议。在过去几年,包括港口、矿山等在内的封闭场景进入商业订单的收获期;但类似干线物流这样的半开放式场景,却喜忧参半。
今年初,作为全球自动驾驶领域的技…
站在「分岔口」的智驾视觉感知
智驾感知方案,正在追求性价比的道路上,有了新的选择。
在上一个辅助驾驶落地周期,以Mobileye、特斯拉为代表的厂商,将单目视觉感知推上高点;彼时,不管是博世、大陆、日立,还是Veoneerÿ…

后视镜为什么要检测反射率
后视镜反射率检测是评估后视镜质量的重要步骤,可以反映后视镜的反射效果是否满足设计要求。一般来说,后视镜的反射率越高,驾驶员观察车后的道路状况就越清晰,从而能够更好地判断与后方车辆的距离和速度差。 后视镜反射率检测的原理…
【自动驾驶】初学者播包与可视化工具学习记录
对于本地进行结果复现或者是功能验证等,需要实车录制数据包ros2,本地播包ros2/plotjuggler,最后结果可视化rviz2。
所以对于初学者,至少要学习ros2相关操作,可以让你进入职场后更好的适应。本文主要针对上面三个步骤进…
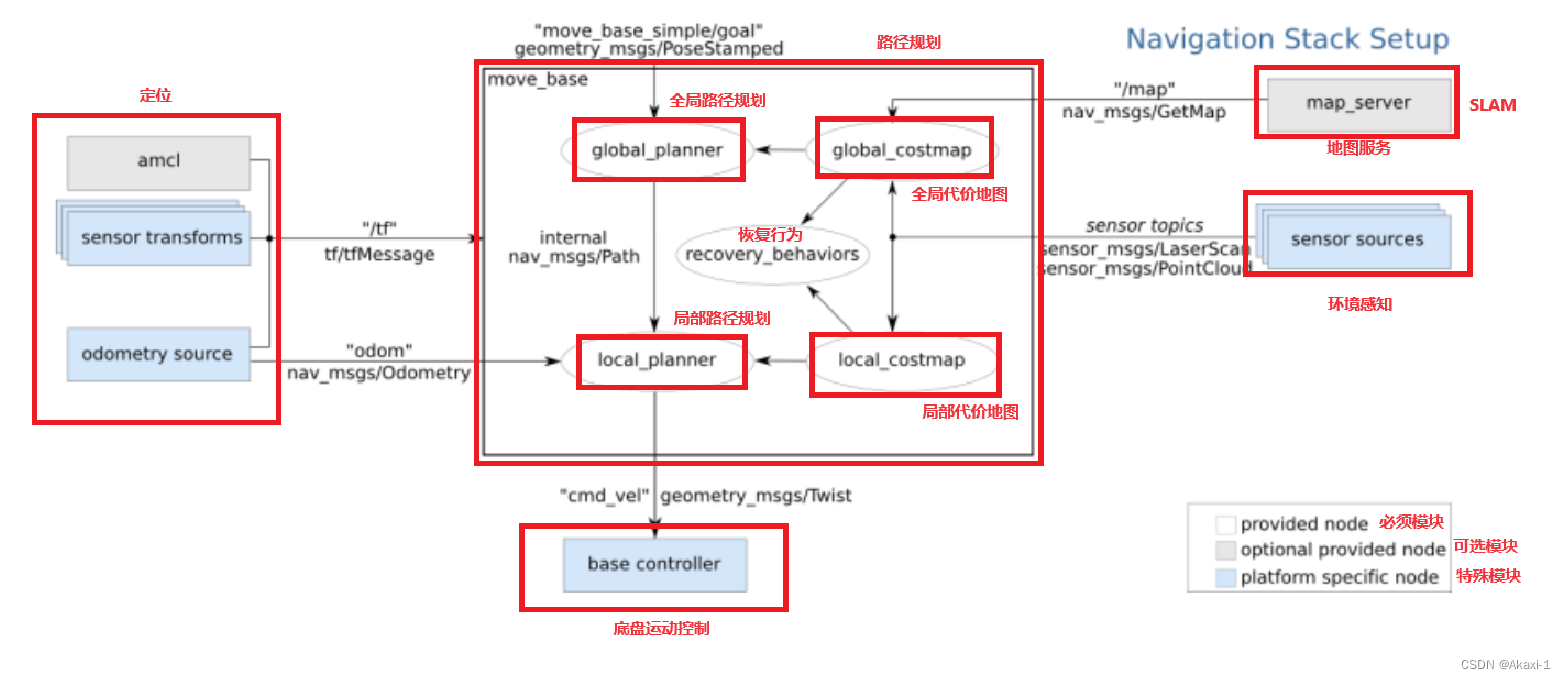
【ROS导航Navigation】一 | 概述
目录
致谢:ROS赵虚左老师
一、【概述】二狗子找大水法
Navigation全图
二、【SLAM】即时定位与地图构建
三、【AMCL】自适应蒙特卡洛定位
四、【Move_base】路径规划
五、【cmd_vel】运动控制
六、环境感知 致谢:ROS赵虚左老师
Introduction A…
TC397 EB MCAL开发从0开始系列 之 [15.2] Fee配置 - QsBlock demo
一、Fee配置1、配置目标2、目标依赖2.1 硬件使用2.2 软件使用2.3 新增模块3、EB配置3.1 配置讲解3.2 模块配置3.2.1 MCU配置3.2.2 PORT配置3.2.3 Fls_17_Dmu配置3.2.4 Fee配置3.2.5 Irq配置3.2.6 ResourceM配置4、ADS代码编写及调试4.1 工程编译4.2 测试结果4.3 测例源码->

城市NOA到来时刻,车企密集上车NVIDIA
作者 |张祥威
编辑 |德新 基于双NVIDIA DRIVE Orin实现城市NOA,已是今天国内汽车行业的主流做法。 这款芯片获得广泛的市场认同,用时仅一年多。去年3月, NVIDIA DRIVE Orin正式投产,此后从造车新势力一路来到更多自主品牌的车内&…
武汉光庭公司地图引擎开发工程师24秋招三场面试完整流程
本文介绍2024届秋招中,武汉光庭信息技术股份有限公司的智能驾驶地图引擎开发工程师岗位一面、二面、三面的面试基本情况、提问问题等。 10月投递了武汉光庭信息技术股份有限公司的智能驾驶地图引擎开发工程师岗位,暂时并不清楚所在的部门。目前完成了全部…
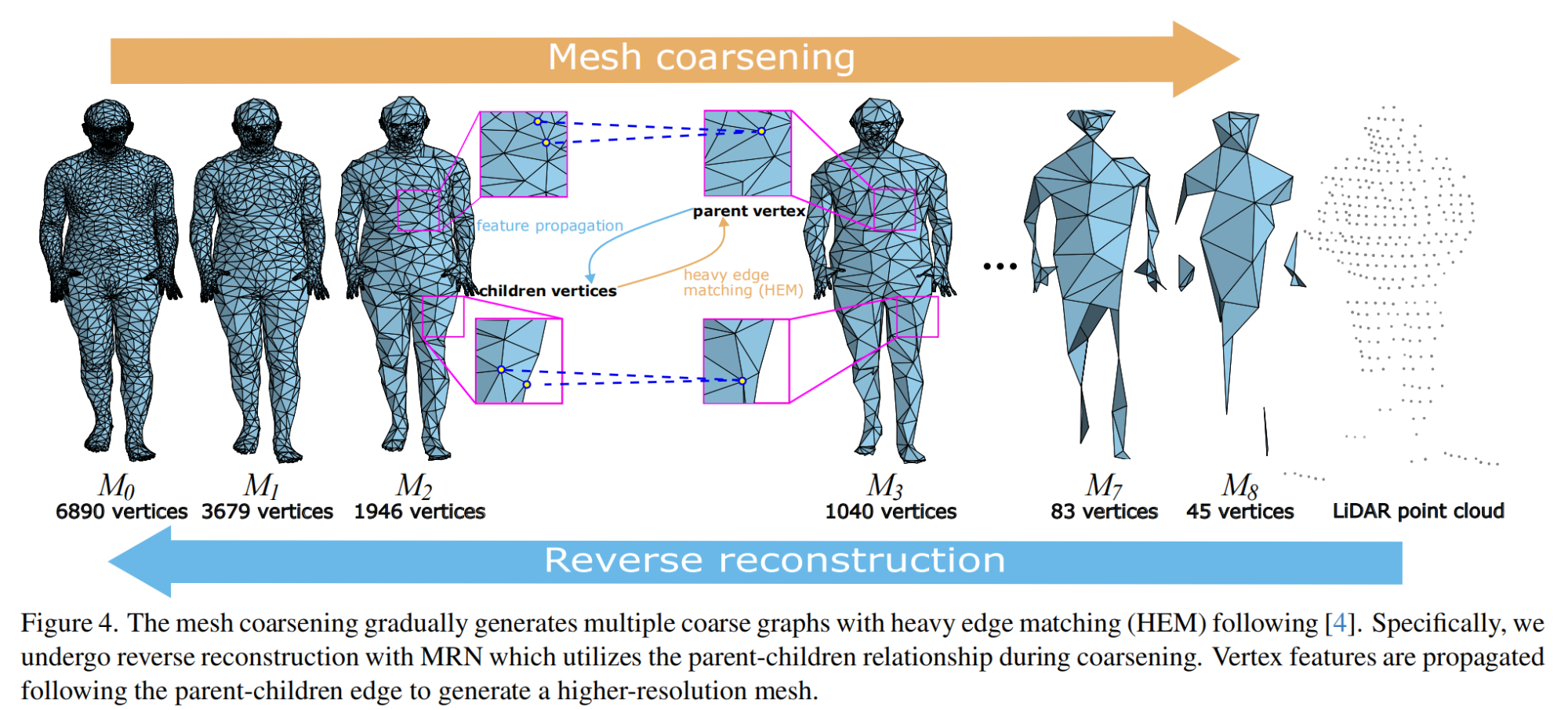
CV计算机视觉每日开源代码Paper with code速览-2023.11.21
点击CV计算机视觉,关注更多CV干货
论文已打包,点击进入—>下载界面
点击加入—>CV计算机视觉交流群
1.【基础网络架构:Transformer】Multi-entity Video Transformers for Fine-Grained Video Representation Learning 论文地址&…

【自动驾驶中的SLAM技术】第2讲:基础数学知识回顾
第二讲:基础数学回顾 文章目录 第二讲:基础数学回顾1 几何学1.1 坐标系1.2 坐标变换① 空间向量② 基变换③ 坐标变换④ 总结 1.3 四元数与旋转向量 2 运动学2.1 李群视角2.2 四元数视角2.3 四元数的李代数与旋转向量间的转换2.4 SO(3)t 上的运动学2.5 线…
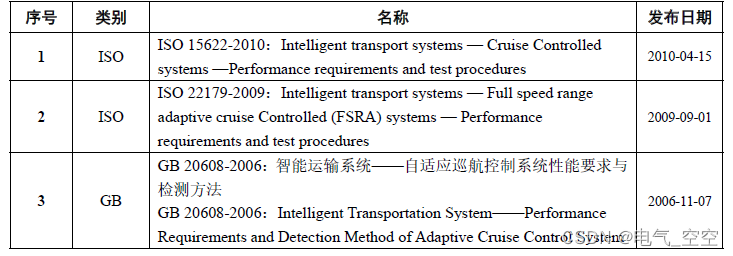
自动驾驶DCLC 功能规范
目录 1 概述Summary....................................................................................................... 4 1.1 目的Purpose....................................................................................................... 4 1.2 范围Ran…
AVP对纵向控制ESP(Ibooster)的需求规范
目录
1. 版本记录... 3
2. 文档范围和控制... 4
2.1 目的/范围... 4
2.2 文档冲突... 4
2.3 文档授权... 4
2.4 文档更改控制... 4
3. 功能概述... 5
4. 系统架构... 6
5. 主要安全目标... 7
5.1 …
Crocoddyl: 多接触最优控制的高效多功能框架
系列文章目录 前言 我们介绍了 Crocoddyl(Contact RObot COntrol by Differential DYnamic Library),这是一个专为高效多触点优化控制(multi-contact optimal control)而定制的开源框架。Crocoddyl 可高效计算给定预定…

英伟达 Jetson Xavier/Xavier NX/Orin系统移植编译
英伟达 Jetson Xavier/Xavier NX/Orin系统移植编译
1、下载Jetson BSP包和交叉编译环境
地址:https://developer.nvidia.com/embedded/jetson-linux-archive下载需要版本即可,此次编译采用32.4.2版本 需要下载的文件如下:
2、新建一个文件…

四. 基于环视Camera的BEV感知算法-BEVDet
目录 前言0. 简述1. 算法动机&开创性思路2. 主体结构3. 损失函数4. 性能对比总结下载链接参考 前言 自动驾驶之心推出的《国内首个BVE感知全栈系列学习教程》,链接。记录下个人学习笔记,仅供自己参考 本次课程我们来学习下课程第四章——基于环视Cam…
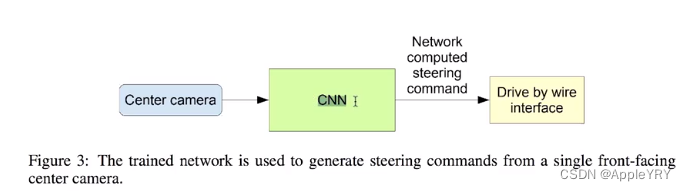
项目实战:自动驾驶之方向盘操纵
项目介绍
根据汽车前方摄像头捕捉的画面,控制汽车方向盘转动的方向和角度,这是自动驾驶要解决的核心问题。这个项目主要是通过使用深度神经网络解决一个回归问题。不同于分类、识别场景,回归问题中神经网络输出的是一个连续的值。 通过这个项目的学习,可以将神经网络用于通…
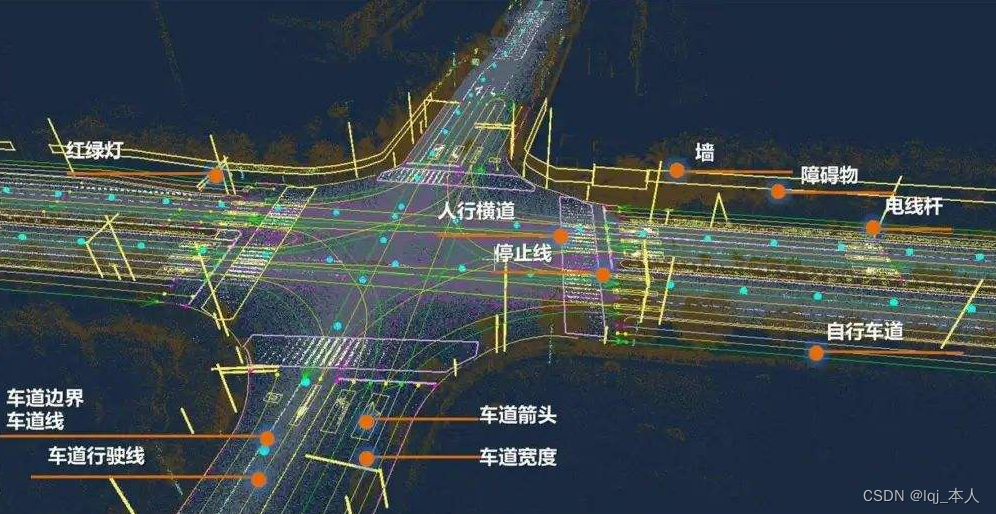
自动驾驶技术入门平台分享:百度Apollo开放平台9.0全方位升级
目录
平台全方位的升级
全新的架构
工具服务
应用软件(场景应用)
软件核心
硬件设备
更强的算法能力
9.0版本算法升级总结
更易用的工程框架
Apollo开放平台9.0版本的技术升级为开发者提供了许多显著的好处,特别是对于深度开发需求…

【解析rosbag可视化】二维图像可视化点云
文章目录 前言一、环境配置二、代码三、效果图 前言 一般我们把采集的原始数据放在 rosbag 中。我们要可视化需要对 bag 包解析二维图像可视化点云思路:在二维图片显示投影的点云就行了 一、环境配置 我用的 python 3.7pip install --extra-index-url https://rospy…
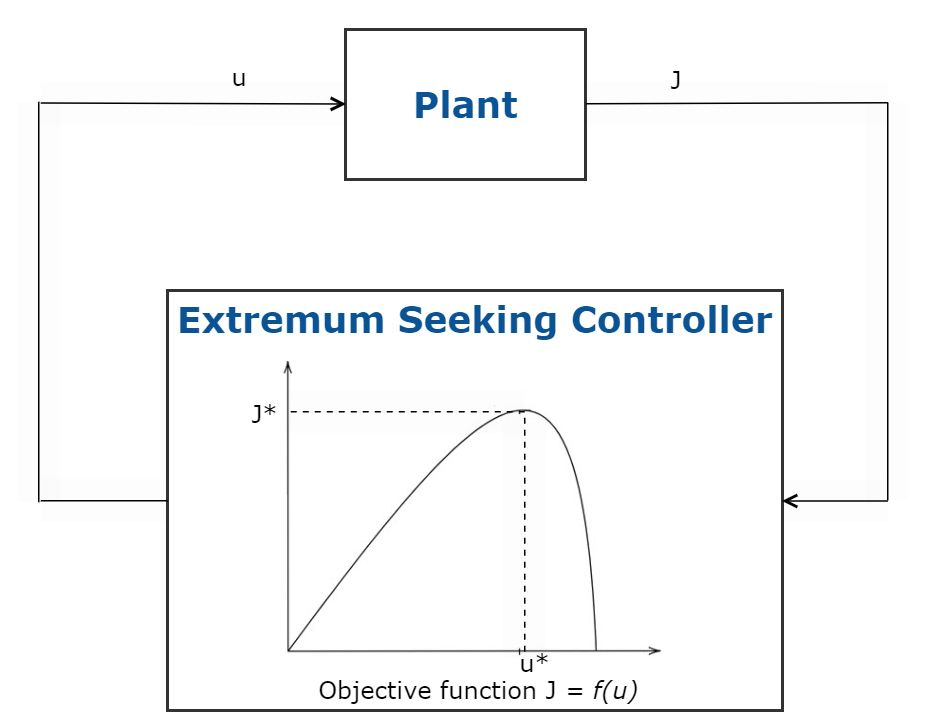
MATLAB - 最优控制(Optimal Control)
系列文章目录 前言 - 什么是最优控制? 最优控制是动态系统满足设计目标的条件。最优控制是通过执行以下定义的最优性标准的控制律来实现的。一些广泛使用的最优控制方法有: 线性二次调节器 (LQR)/线性二次高斯 (LQG) 控制 模型预测控制 强化学习 极值…

中国激光雷达的2023:倔强的笨小孩
作者 |David
编辑 |王博 现在回头来看,从2007年莱万多夫斯基和大卫霍尔在硅谷骑着摩托车四处兜售激光雷达开始,到2023年仅中国车载市场出货量接近60万,覆盖了市面上40%以上搭载高阶智驾的新车型,激光雷达一直在用有力的数据回应着…
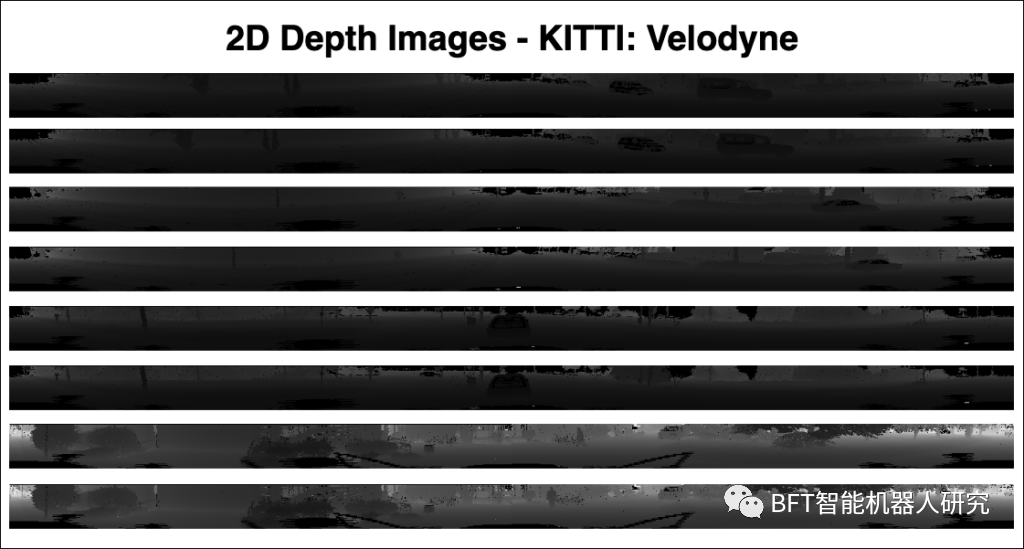
使用Open3D实现3D激光雷达可视化:以自动驾驶的2DKITTI深度框架为例(上篇)
原创 | 文 BFT机器人 3DLiDAR传感器(或)三维光探测和测距是一种先进的发光仪器,能够像我们人类一样在三维空间中感知现实世界。这项技术特别彻底改变了地球观测、环境监测、侦察和现在的自动驾驶领域,它提供准确和详细数据的能力…
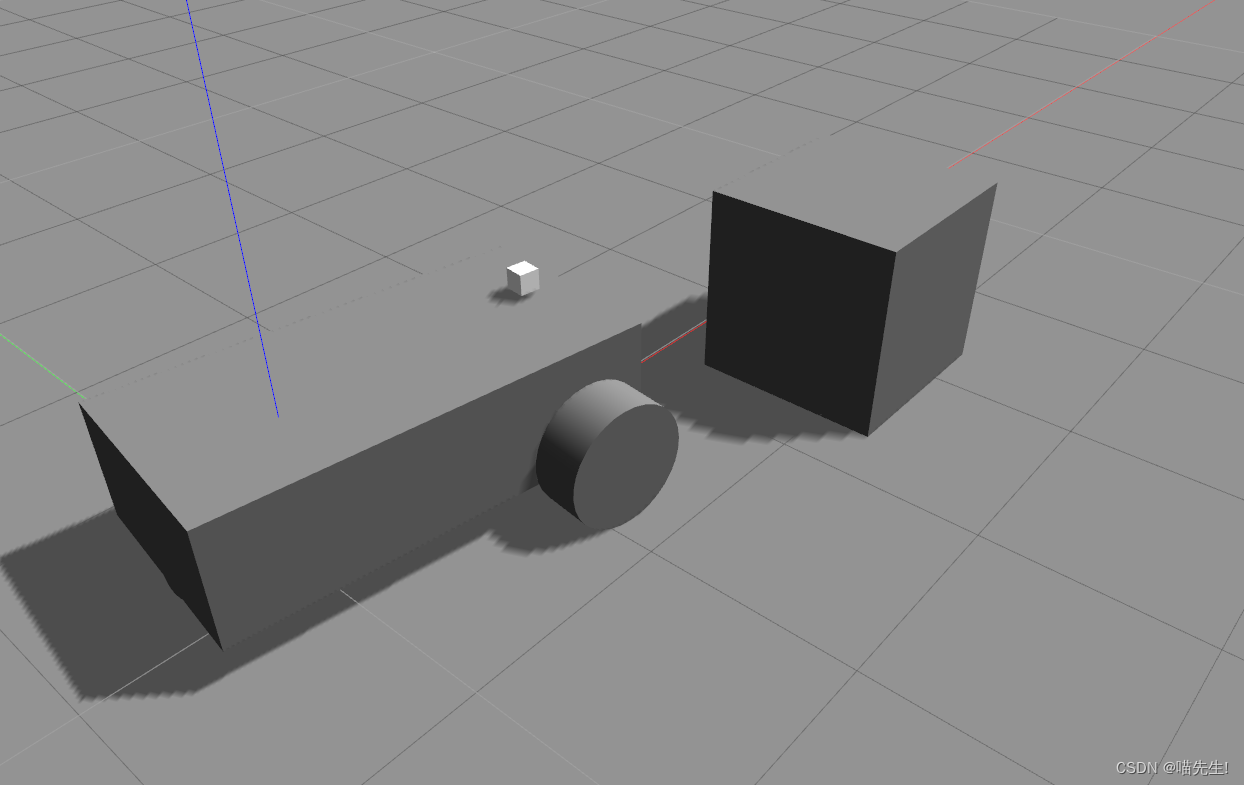
Gazebo GUI模型编辑器
模型编辑器
现在我们将构建我们的简单机器人。我们将制作一个轮式车辆,并添加一个传感器,使我们能够让机器人跟随一个斑点(人)。
模型编辑器允许我们直接在图形用户界面 (GUI) 中构建简单的模型。对于更复…
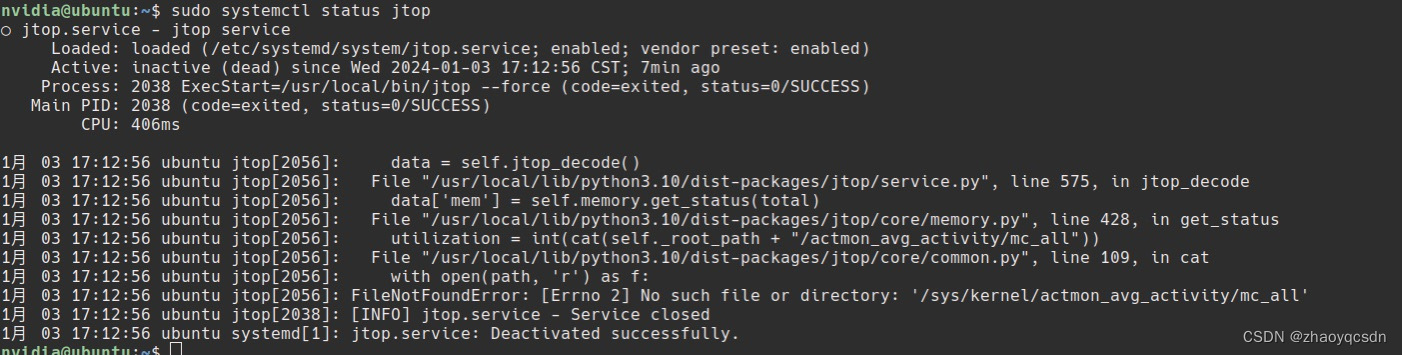
NVIDIA Jetpack6.0DP使用过程中的问题
Jetpack6.0DP是2023年12月才发布, 操作系统使用了ubuntu 22.04, gcc是11.4,版本都很高, 用起来还存在一些问题
无法使用jtop
https://forums.developer.nvidia.com/t/jtop-no-longer-works-on-jp-6-0-dp/275215 使用$ sudo -H p…
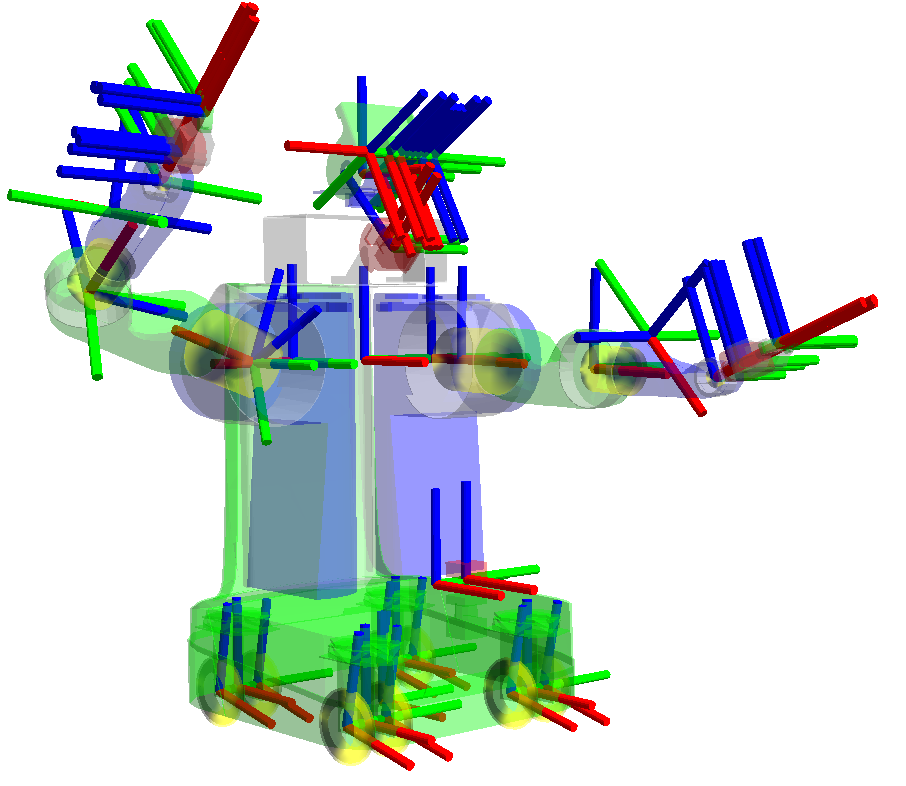
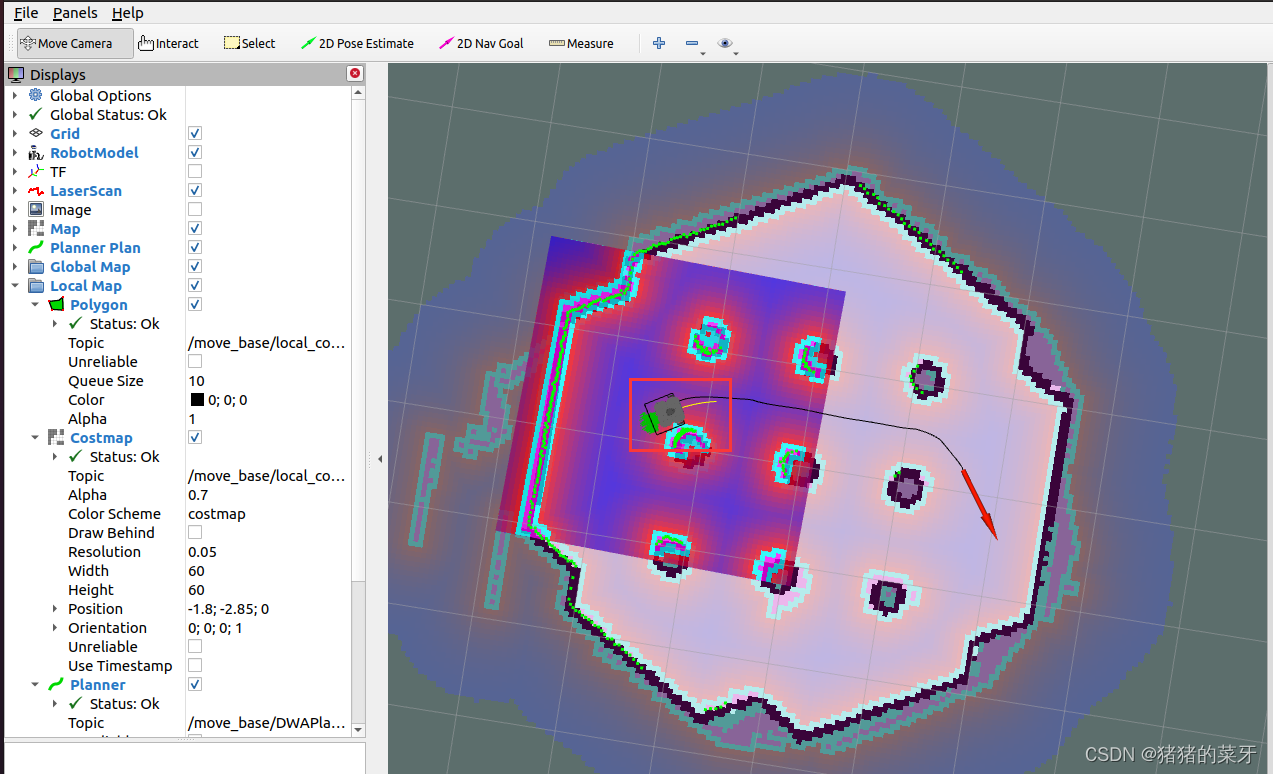
创建ROS模型与小机器人地图规划
1、打开自己的VM系统 2、安装小机器人的安装包,输入如下命令,回车输入密码(自己设的):
sudo apt install ros-noetic-turtlebot3-simulations ros-noetic-turtlebot3-slam ros-noetic-turtlebot3-navigation 提示我之前安装过了
3、用rosla…

51-12 多模态论文串讲—BLIP 论文精读
视觉语言预训练VLP模型最近在各种多模态下游任务上获得了巨大的成功,目前还有两个主要局限性:
(1) 模型角度: 大多数方法要么采用encoder模型,要么采用encoder-decoder模型。然而,基于编码器的模型不太容易直接转换到文本生成任务࿰…
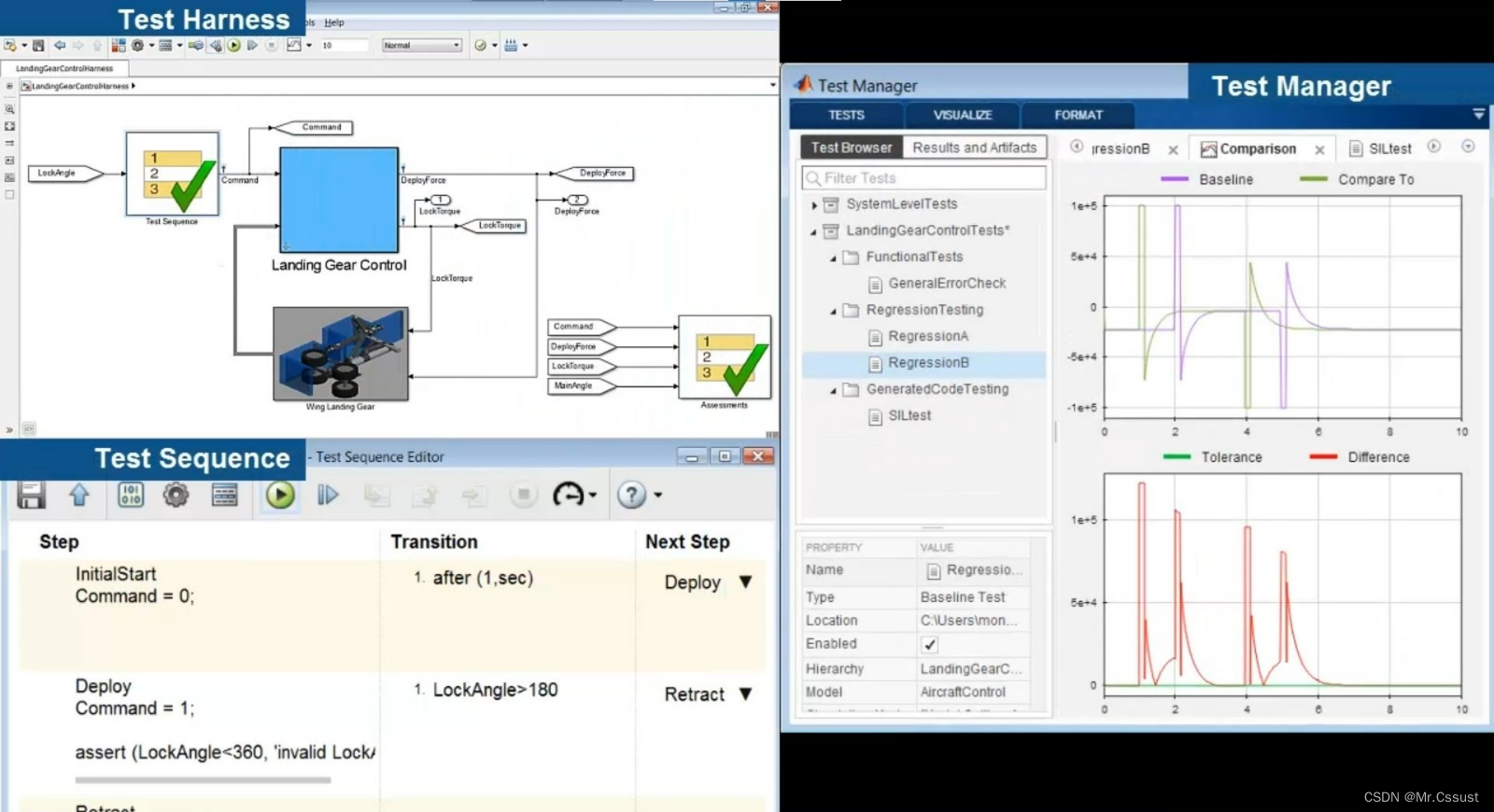
基于Matlab/Simulink的MIL仿真验证解决方案
文章目录
需求追溯
虚拟环境
模型检查
仿真验证
测试报告
参考文献 针对模型开发阶段的ECU算法,可以很直接地将其与虚拟车辆模型连接起来,通过MIL对其进行验证和确认。可以在开发过程的早期检测到设计错误和不正确的需求,也有助于安全地…
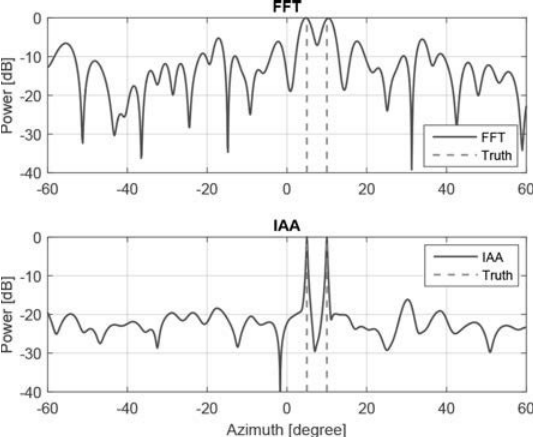
现代雷达车载应用——第3章 MIMO雷达技术 3.3节 汽车MIMO雷达测角
经典著作,值得一读,英文原版下载链接【免费】ModernRadarforAutomotiveApplications资源-CSDN文库。
3.3 汽车MIMO雷达测角 在发射天线和接收天线分别为Mt和Mr的汽车MIMO雷达中,可以合成一个由Mt*Mr个阵元组成的虚拟ULA,单元间…
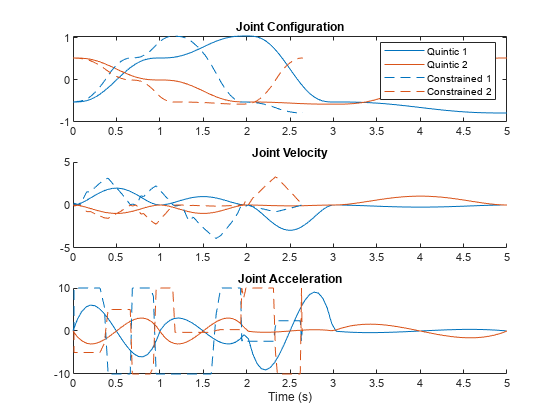
MATLAB - 使用 TOPP-RA 求解器生成带约束条件的时间最优轨迹
系列文章目录 前言
本例演示如何生成满足速度和加速度限制的轨迹。该示例使用了 contopptraj 函数,该函数使用可达性分析 (RA) 求解受约束的时间最优路径参数化 (TOPP) 轨迹。 一、示例背景
本例解决的是 TOPP 问题,这是一个机器人问题,其目…

智云谷再获资本市场青睐,完成数千万元A+轮融资
近日,深圳前海智云谷科技有限公司(以下简称“智云谷”)完成数千万元A轮融资,本轮融资由青松基金独家投资,多维资本担任独家融资财务顾问。本轮融资资金将用于扩大新技术研发投入、智能工厂扩产、加速产品交付ÿ…
从节点记录包 (C++)
目标:将数据从您自己的 C 节点记录到包中。
背景
rosbag2不仅提供命令行工具。 它还提供了一个 C API,用于从您自己的源代码读取和写入包。 这允许您订阅主题并将接收到的数据保存到包中,同时对该数据执行您选择的任何其他处理。ros2 bag
…
MATLAB - 比较 DDPG Agent 和 LQR 控制器
系列文章目录 前言
本示例展示了如何训练深度确定性策略梯度(DDPG)Agent,以控制 MATLAB 中建模的二阶线性动态系统。该示例还将 DDPG Agent 与 LQR 控制器进行了比较。
有关 DDPG 代理的更多信息,请参阅深度确定性策略梯度 (DDP…

ROS从入门到精通4-1:Docker安装与常用命令总结
目录 0 专栏介绍1 Docker与机器人应用2 Docker安装步骤3 Docker常用命令3.1 创建与启动容器3.2 暂停与删除容器3.3 容器文件拷贝3.4 构建镜像与上下文 0 专栏介绍
本专栏旨在通过对ROS的系统学习,掌握ROS底层基本分布式原理,并具有机器人建模和应用ROS进…
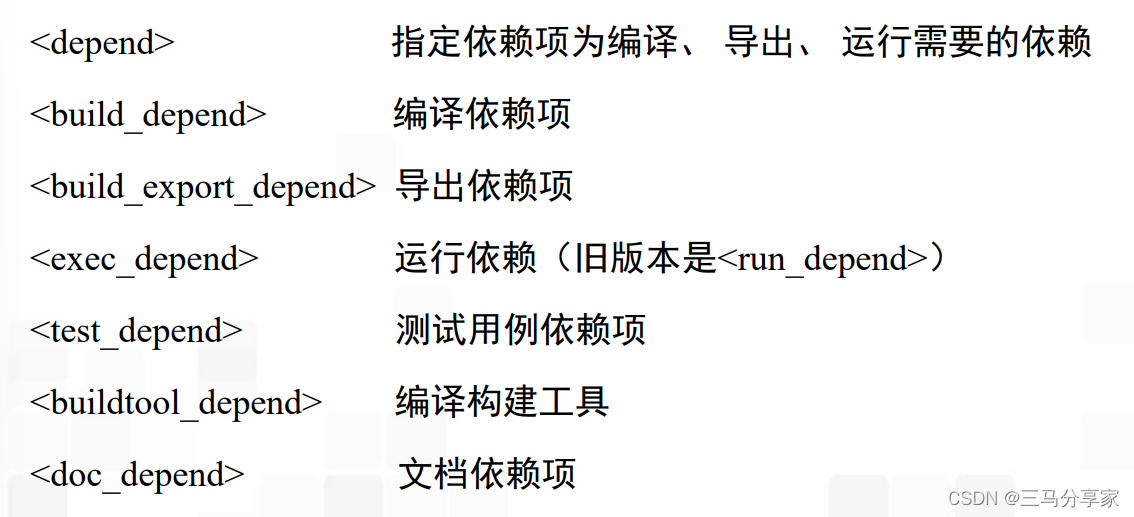
ROS笔记一:工作空间和功能包
目录
工作空间
如何创建工作空间: 编译工作空间 设置环境变量 功能包 创建功能包
CMakeLists.txt package.xml 工作空间
ROS的工作空间是用来存放工程文件代码的文件夹
ROS的开发依赖于工作空间,包括编写代码、编译等都是在工作空间下进行的
工作空…
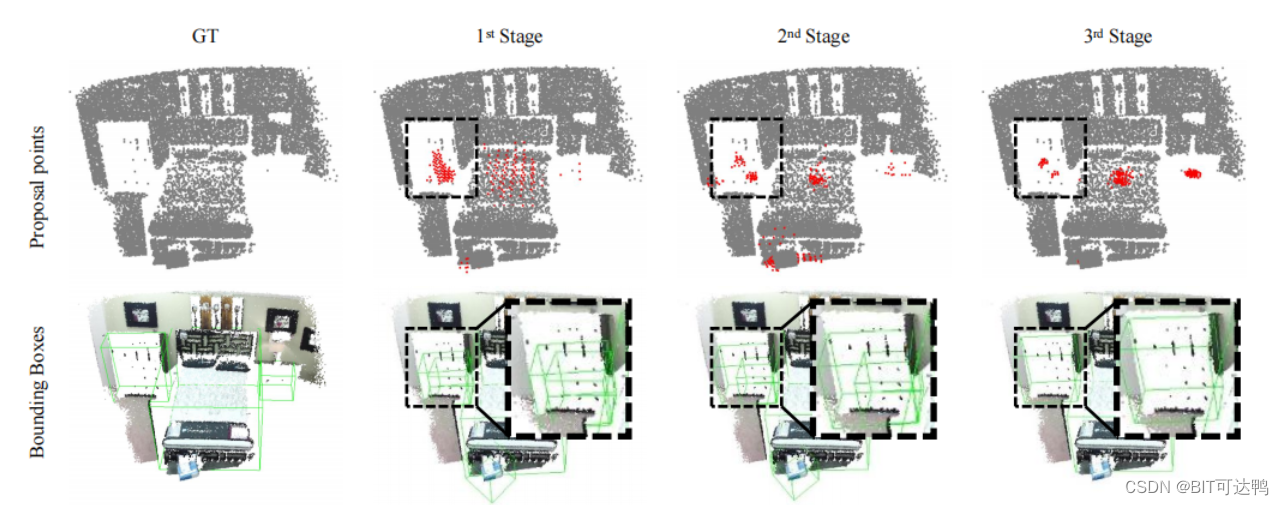
【2024 目标检测】CascadeV-Det:探究基于点的 3D 目标检测中心点定位的对模型精度影响
【2024 目标检测】CascadeV-Det:探究基于点的 3D 目标检测中心点定位的对模型精度影响 摘要:观察:方法:Instance-Aware Voting:Cascade Positive Assignment: 实验结果: 来源:Arxiv …

中国联通助力吴江元荡生态岸线打造5G+自动驾驶生态长廊
吴江,素有“鱼米之乡”“丝绸之府”的美誉,其地理位置优越,地处太湖之滨。近年来,随着长三角生态绿色一体化发展示范区(以下简称“示范区”)的建立,元荡更是声名大噪,成为众多游客心…
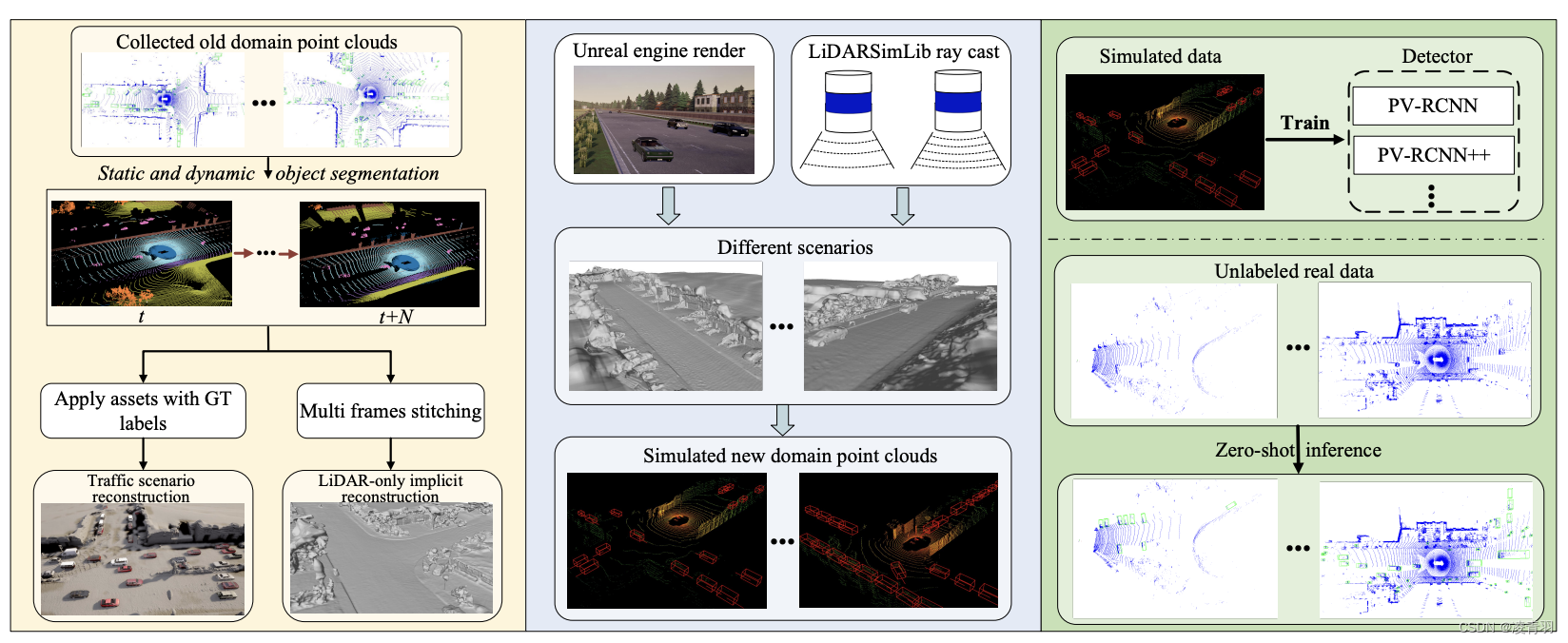
基于时序的4D标注工作
1. 全局地图重建
1.1. Lidar和Camera的组合
R3LIVE:https://arxiv.org/pdf/2109.07982.pdf 方法:对齐camera和lidar的信息LIO和VIO紧耦合的方式 LiDAR-inertial odometry (LIO)visual-inertial odometry (VIO) 缺点: 地面出现空洞紧耦合对标…
MATLAB - 四元数(quaternion)
系列文章目录 前言 一、简介
四元数是一种四元超复数,用于三维旋转和定向。
四元数的表示形式为 abicjdk,其中 a、b、c 和 d 为实数,i、j 和 k 为基元,满足等式:i2 j2 k2 ijk -1。
四元数集用 H 表示,…
YOLOv8 如何进行多任务合并:分割与检测合并进行自动驾驶
文章大纲 多任务的合并:分割与检测合并进行自动驾驶Update:The Illustration of A-YOLOMContributionsResultsParameters and speedTraffic Object Detection ResultDrivable Area Segmentation ResultLane Detection Result:Ablation Studies 1: Adaptive concatenation modu…
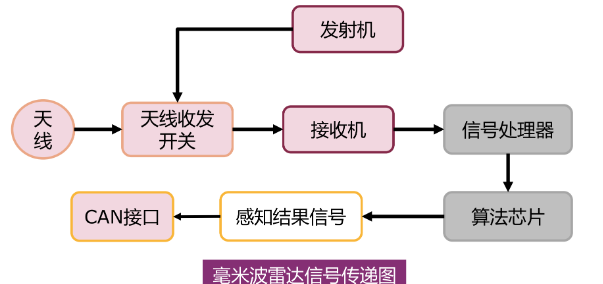
自动驾驶中的“雷达”
自动驾驶中有好几种雷达,新手可能会混淆,这里统一介绍一下它们。
首先,所有雷达的原理都是发射波,接收回波(可能是声波或电磁波),并通过发射和接收的时间差以及波的速度计算距离。只不过发射的…
自动驾驶MIL(模型在环)、SIL(软件在环)、PIL(处理器在环)和HIL(硬件在环)
1、硬件在环
简而言之,硬件在环仿真,是将真的控制器连接假的被控对象(用实时仿真硬件来模拟),以一种高效、低成本的方式对控制器进行全面测试。
一般而言,做HIL测试的前提是控制器已经开发好,…
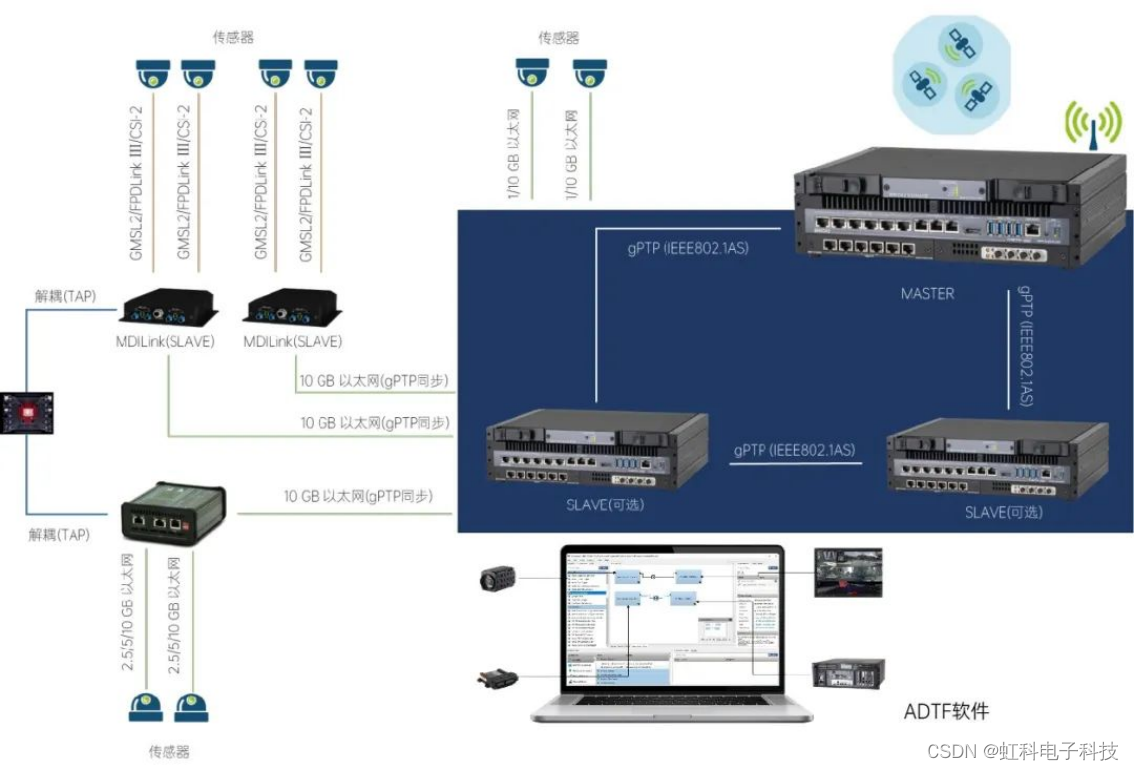
虹科方案丨L2进阶L3,数据采集如何助力自动驾驶
来源:康谋自动驾驶 虹科方案丨L2进阶L3,数据采集如何助力自动驾驶
原文链接:https://mp.weixin.qq.com/s/qhWy11x_-b5VmBt86r4OdQ
欢迎关注虹科,为您提供最新资讯! 12月14日,宝马集团宣布,搭载…

2023启示录丨自动驾驶这一年
图片|《老人与海》插图 过去的20年,都没有2023年如此动荡。 大模型犹如一颗原子弹投入科技圈,卷起万里尘沙,传统模式瞬间被夷为平地,在耀眼的白光和巨大的轰鸣声之下,大公司、创业者、投资人甚至是每一位观…
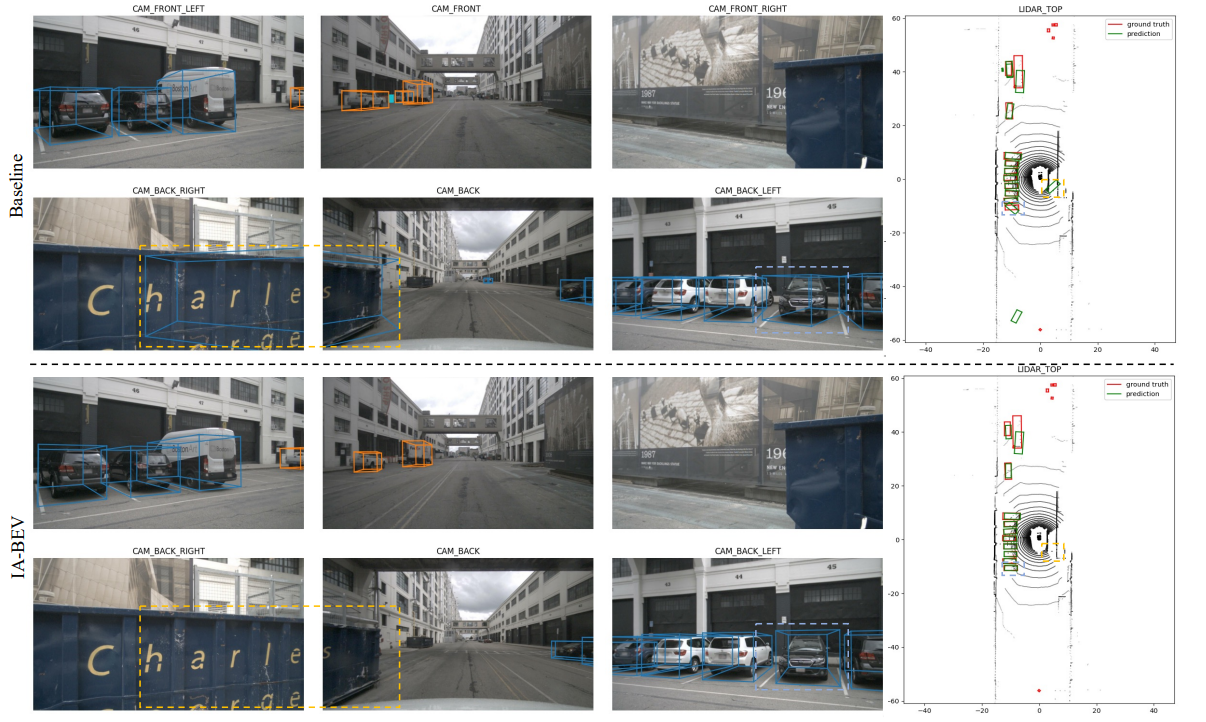
【三维目标检测/自动驾驶】IA-BEV:基于结构先验和自增强学习的实例感知三维目标检测(AAAI 2024)
系列文章目录
论文:Instance-aware Multi-Camera 3D Object Detection with Structural Priors Mining and Self-Boosting Learning 地址:https://arxiv.org/pdf/2312.08004.pdf 来源:复旦大学 英特尔Shanghai Key Lab /美团 文章目录 系列文…

Apollo自动驾驶系统:实现城市可持续交通的迈向
前言 「作者主页」:雪碧有白泡泡 「个人网站」:雪碧的个人网站
ChatGPT体验地址 文章目录 前言引言:1. 什么是微服务架构?2. 微服务架构的组成要素3. 微服务架构的挑战和解决方案4. 微服务架构的可扩展性和弹性 第二部分&#x…
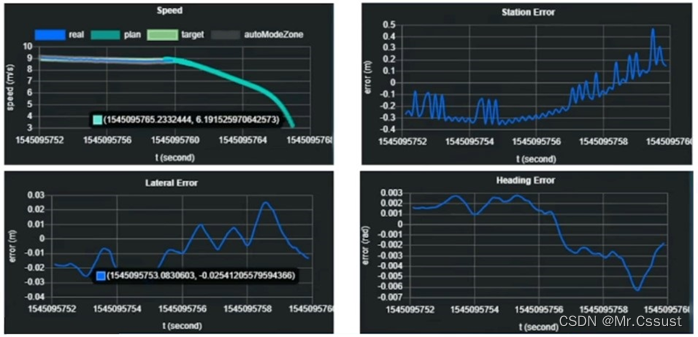
自动驾驶学习笔记(二十四)——车辆控制开发
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往: 《自动驾驶新人之旅》免费课程—> 传送门
《Apollo开放平台9.0专项技术公开课》免费报名—>传送门
文章目录
前言
控制算法
控制标定
控制协议…

没有一家车企能绕开「数据闭环」
作者 |张祥威
编辑 |德新 2023年,在比亚迪那次公布智驾数据规模后,智能化下半场的战斗就正式打响了。
如今,自动驾驶正在沿着特斯拉提出的「BEVTransformer」急速推进,这条技术路线短短几年就得到了验证,随着智驾起较…
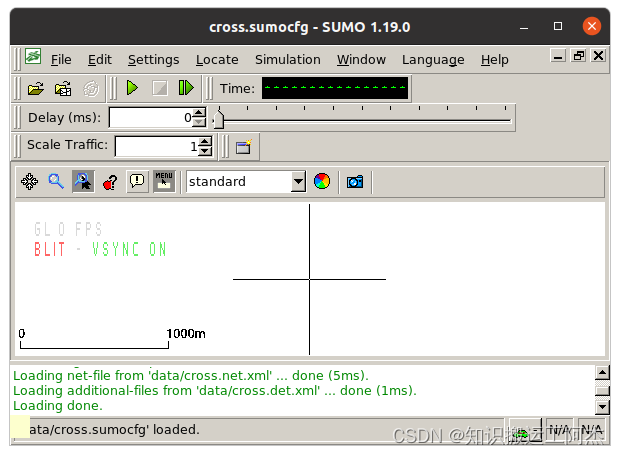
ubuntu20.04安装sumo
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 有问题,请大家指出,争取使方法更完善。这只是ubuntu安装sumo的一种方法。一、注意事项1、首先明确你的ubuntu的用户名是什么 二、sumo安装1.…
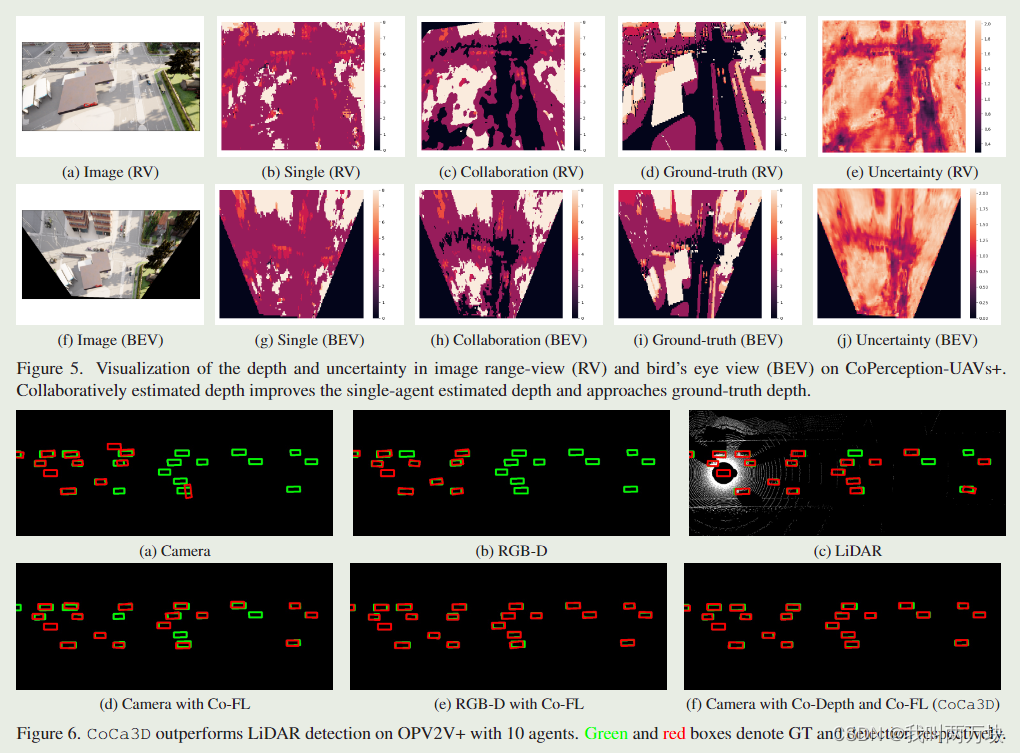
【论文解读】Collaboration Helps Camera Overtake LiDAR in 3D Detection
CoCa3D 摘要引言Collaborative Camera-Only 3D DetectionCollaborative depth estimationCollaborative detection feature learning 实验结论和局限 摘要
与基于 LiDAR 的检测系统相比,仅相机 3D 检测提供了一种经济的解决方案,具有简单的配置来定位 3…
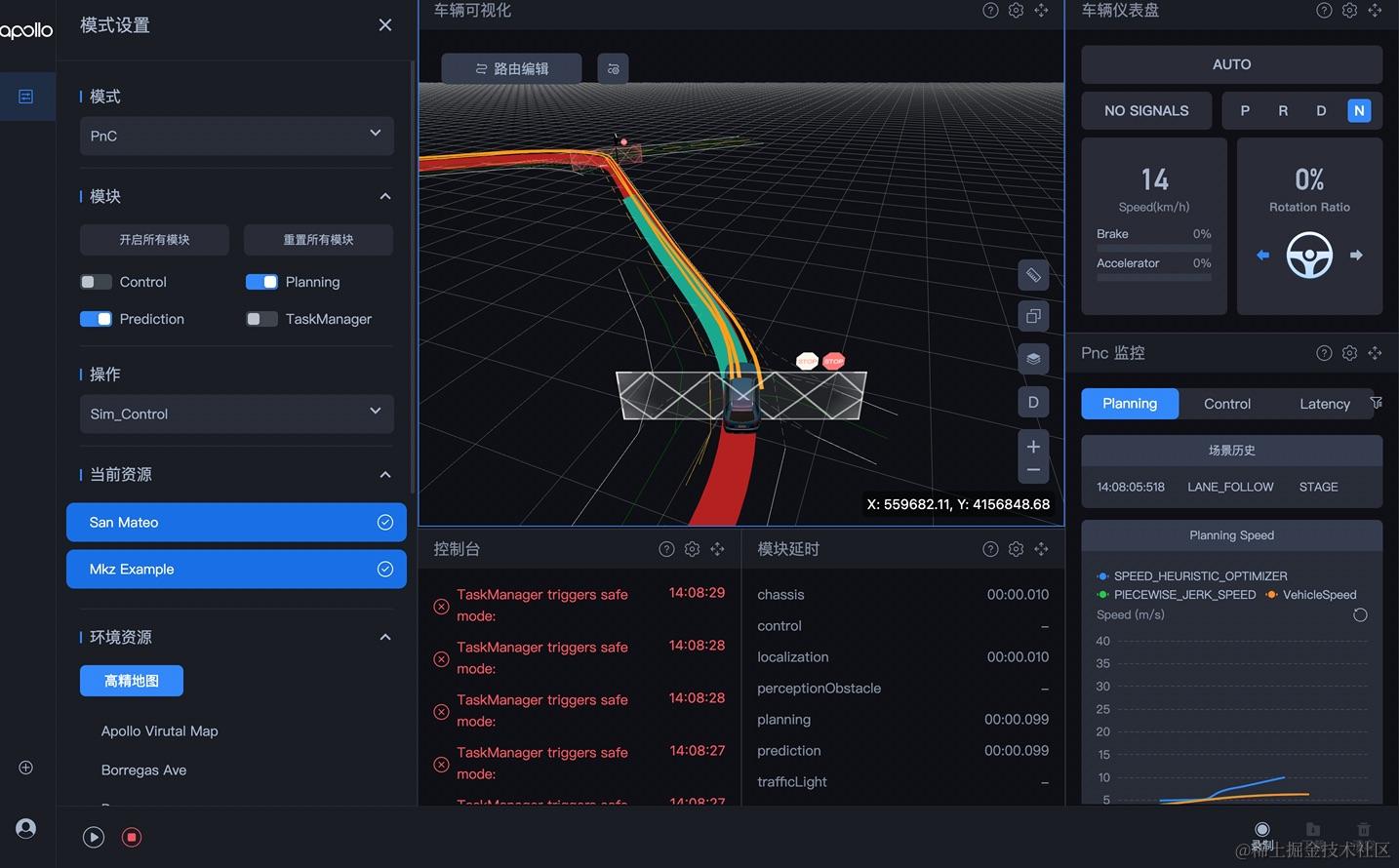
【百度Apollo】轨迹绘制:探索路径规划和可视化技术的应用
🎬 鸽芷咕:个人主页 🔥 个人专栏: 《linux深造日志》《粉丝福利》 ⛺️生活的理想,就是为了理想的生活! ⛳️ 推荐 前些天发现了一个巨牛的人工智能学习网站,通俗易懂,风趣幽默,忍不住分享一下…
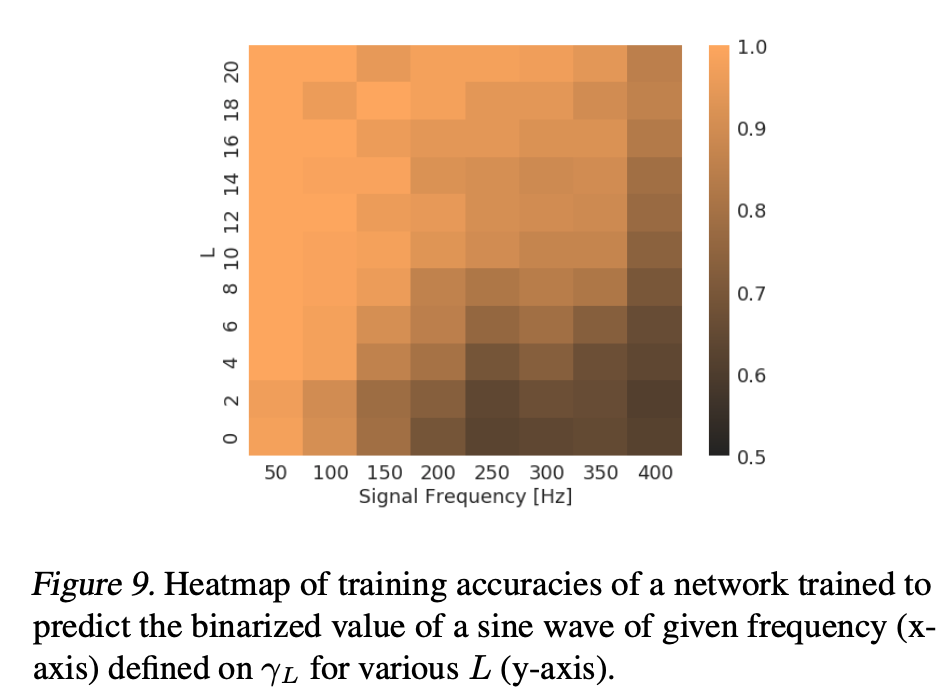
On the Spectral Bias of Neural Networks论文阅读
1. 摘要
众所周知,过度参数化的深度神经网络(DNNs)是一种表达能力极强的函数,它甚至可以以100%的训练精度记忆随机数据。这就提出了一个问题,为什么他们不能轻易地对真实数据进行拟合呢。为了回答这个问题,研究人员使用傅里叶分析…
曲线生成 | 基于多项式插值的轨迹规划(附ROS C++/Python/Matlab仿真)
目录 0 专栏介绍1 多项式插值2 多项式插值轨迹规划3 算法仿真3.1 ROS C++仿真3.2 Python仿真3.3 Matlab仿真0 专栏介绍
🔥附C++/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等);局部规划(DWA、APF等);曲线优化…
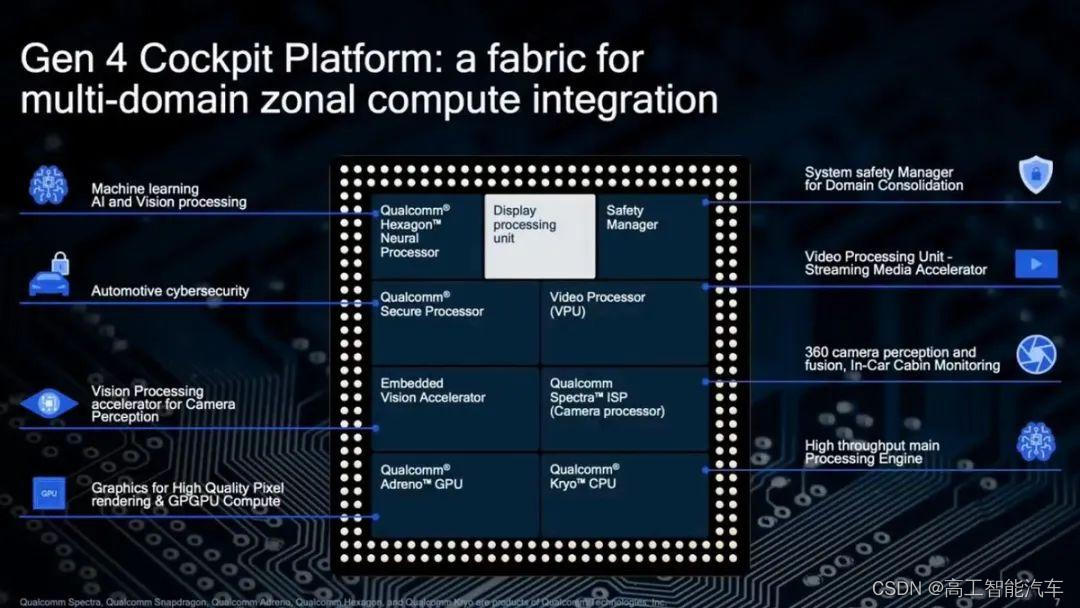
全年冲刺200万辆!座舱域控制器进入「软硬升级」周期
随着座舱智能化落地进程加速,传统分布式多ECU架构向域控制器集成的前装市场正在加速。
从车企的技术演进来看,新一代主流电子电气架构将普遍采用中央超算(C-DCU)区域控制(Z-DCU)的硬件架构,其中…

《移动机器人运动规划与集群协同》直播要点总结
目录
1 自主导航框架的基本介绍
2 无人系统的自主导航
2.1 快速重规划
2.2 高机动轨迹生成
2.3 具有时间最优运动原语的超轻量级规划器
2.4 实时交互的自主航拍系统
2.5 任意形状机器人的快速轨迹优化
2.6 超越2D环境的地面移动机器人
2.7 基于微分平坦的无人车轨…
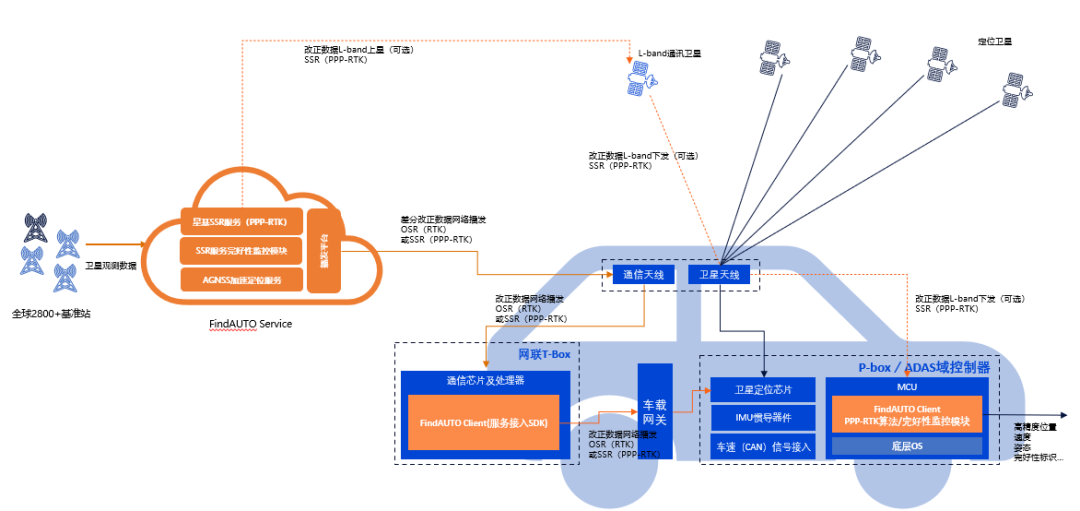
智驾发展的前世今生|为高阶自动驾驶而生的千寻FindAUTO NSSR解决方案
众所周知,定位技术作为智能驾驶的关键核心,解决了“我在哪”的问题,与感知、决策、执行一起,构成了智能驾驶四大主体功能。
在L3自动驾驶发展落地如火如荼之际,对于定位服务的需求愈发细致严苛——
车辆基于自身实时…
中国智能网联汽车技术规程-基础行车辅助测评细则
1. 评价方法
本测试评价方法测试对象包括自适应巡航系统、车道居中控制系统、组合驾驶辅助系统。当系统提示和脱手检测为满分时,可进行领航辅助驾驶的测试,欢迎关注,后续更新。
1.1 指标体系
基础行车辅助下设指标如表 1-1 所示。
表 1- 1 基础行车辅助指标体系 基础行车…
Apollo自动驾驶开发笔记46——apollo coredump的生成和调试
Apollo自动驾驶开发笔记46——apollo coredump的生成和调试 一级目录1、 检查核心转储是否打开2、在当前命令终端中打开核心转储3、打开apollo某个dag的coredumpapollo调试coredump方法一级目录
大多数系统默认关闭了核心转储功能,需重新设置打开。
1、 检查核心转储是否打开…

领跑行泊一体,纵目科技剑指自动驾驶L2到L4的规模化商业落地机遇
数据智能产业创新服务媒体 ——聚焦数智 改变商业 2019年,通用、丰田、特斯拉等11家车企承诺自动驾驶时间表,他们大都表示在2020年底实现高级别自动驾驶。以特斯拉为例,其CEO埃隆马斯克曾承诺在2020年实现自动驾驶食言后,随后在…

自动驾驶--定位技术
[整理自百度技术培训中心课程](https://bit.baidu.com/products?id70)
为什么无人车需要精确的定位系统 在地下车库实现自动泊车的一个非常关键的技术是什么呢?那就是定位技术。
为什么无人车需要一个精确的定位系统。为什么无人车需要精确的定位系统ÿ…

论文阅读笔记 | 三维目标检测——AVOD算法
如有错误,恳请指出。 文章目录1. 背景2. 网络结构3. 实验结果paper:《Joint 3D Proposal Generation and Object Detection from View Aggregation》
1. 背景
AVOD同样是一个two-stage(使用了RPN提取候选框)、anchor-based网络结构。获得较高的召回率对…

环境配置:Udacity的Self-Driving项目安装运行
文章目录 前言1.克隆项目2.执行命令3.新建build文件夹4.启动模拟器5.下一步 前言
Udacity的自动驾驶工程师纳米学位项目(Self-Driving Car Engineer Nanodegree Program)是一项面向学习者的前沿技术项目,旨在提供全面的自动驾驶工程师培训。…

鉴源实验室|自动驾驶仿真测试技术分析
01
引言
随着科技的不断发展,自动驾驶技术逐渐成为汽车行业的热门话题。然而,要将自动驾驶车辆投放到真实道路上之前,必须进行广泛的测试,以确保其在各种情况下都能安全可靠地运行。自动驾驶车辆的测试是一个复杂而昂贵的过程。…
Python无人自动驾驶无人信号灯
Python无人自动驾驶无人信号灯全套系统的重要性如下: 安全性:无人自动驾驶车辆需要准确地识别和理解交通信号灯,以便正确执行相应的操作。基于Python的无人信号灯系统可以使用计算机视觉技术来检测和识别信号灯,确保车辆能够正确地…
OpenPCDet系列 | 2.OpenPCDet整体框架与各模块结构
如有错误,恳请指出。 最近基于OpenPCDet来对PointPillars算法做一些实验,打算用一个完整的专栏来记录整个OpenPCDet的整体框架以及各个模块之间的结构。耗时一个多月,耗费精力较多,这个专栏主要是详细介绍PointPillars的完整算法流程。
由于整体细节比较庞大,所以这里用本…

OpenPCDet系列 | 3.框架训练准备流程
文章目录 训练准备流程1. dataloader部分2. network部分3. optimizer部分4. scheduler部分训练准备流程
对于OpenPCDet中模型的训练过程如下所示,在训练前一般需要进行4个部分的准备:数据准备、网络模型准备、以及优化器和学习率调度器。下面对这4个大部分分别介绍。主要就是…
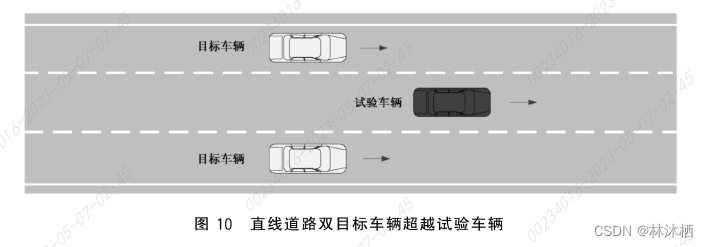
法规标准-GB/T 39265标准解读(2020版)
GB/T 39265是做什么的?
GB/T 39265全名为道路车辆 盲区检测系统性能要求及试验方法,其中主要是对BSD系统的性能要求及测试步骤进行了介绍。本文仅解读M1、N1类车辆相关内容。
一般要求
系统开启与关闭
1.BSD系统应具备手动开启和关闭的功能 2.手动关…
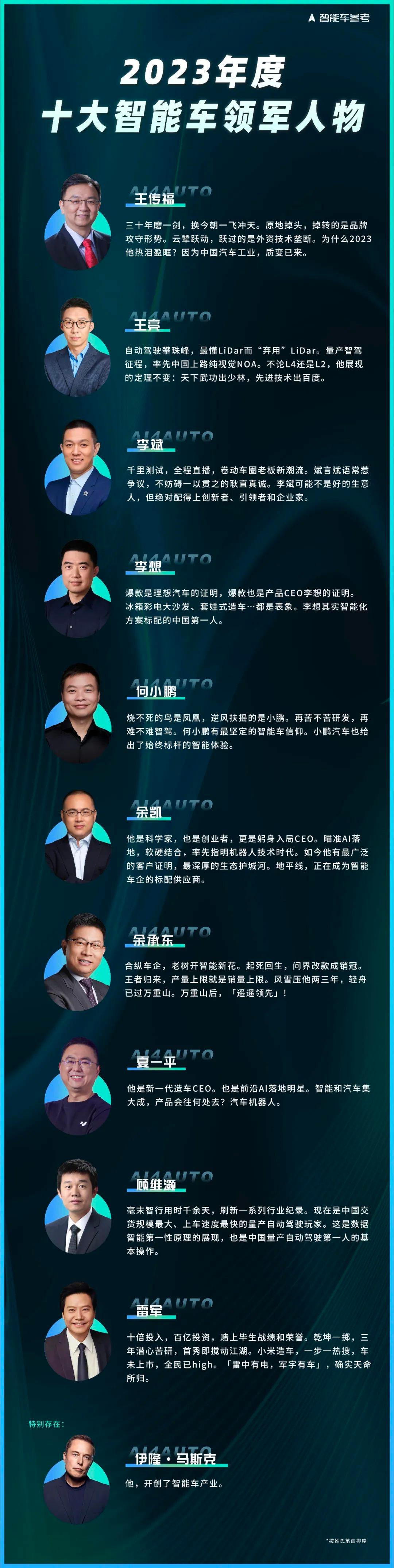
百度Apollo荣获量子位-智能车参考“2023智能车年度评选”两大奖项
2023,是谁在引领智能车浪潮?
量子位-智能车参考发布“2023智能车年度评选”结果。经过业内专业评审和垂直社群万人票选后,百度Apollo荣获「年度十大智能车技术产品/方案」「年度十大智能车领军人物」两项大奖。
年度十大智能车技术产品\方…
MATLAB - 控制小车上的倒立摆
系列文章目录 前言 一、小车 - 摆杆
小车 - 摆杆模型如图 1 所示,使用 Simscape™ Multibody™ 在 Simulink 中建模。 图 1:小车上的倒立摆 图 2:Simscape 多体模型 该系统通过对小车施加可变力 进行控制。控制器需要在将小车移动到新位置或…

【论文笔记】UniVision: A Unified Framework for Vision-Centric 3D Perception
原文链接:https://arxiv.org/pdf/2401.06994.pdf
1. 引言
目前,同时处理基于图像的3D检测任务和占用预测任务还未得到充分探索。3D占用预测需要细粒度信息,多使用体素表达;而3D检测多使用BEV表达,因其更加高效。
本…

嵌入式系统的前景:未来智能汽车
(本文为简单介绍,个人的观点仅供参考)
智能汽车时代已经来临!未来十年,我们的汽车将变得越来越智能化。各大汽车公司在研发自动驾驶技术,目标是实现真正的无人驾驶。要实现这一目标,嵌入式系统将发挥关键作用。
简单来说,嵌入式系统就是在汽…
12.06 校招 实习 内推 面经
绿*泡*泡VX: neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、校招 | 美团北斗计划持续招募中(内推)
校招 | 美团北斗计划持续招募中(内推) 2、校招 | 京东2024校招这些岗位持续热招中(内推…

华为问界M9:领跑未来智能交通的自动驾驶黑科技
华为问界M9是一款高端电动汽车,其自动驾驶技术是该车型的重要卖点之一。华为在问界M9上采用了多种传感器和高级算法,实现了在不同场景下的自动驾驶功能,包括自动泊车、自适应巡航、车道保持、自动变道等。
华为问界M9的自动驾驶技术惊艳之处…
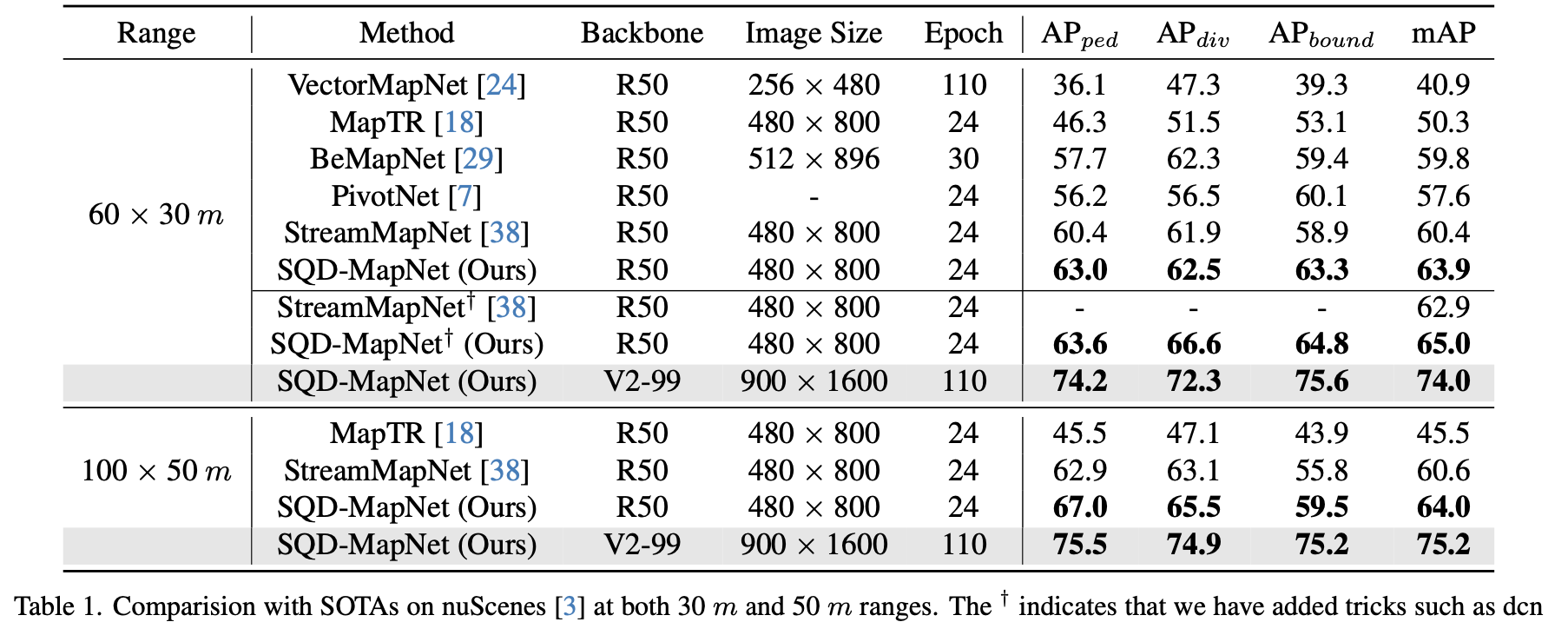
Stream Query Denoising for Vectorized HD Map Construction
参考代码:截止2024.02未开源
动机与出发点 这篇文章是在StreamMapNet的基础上做的,为了在局部地图感知任务上提升时序上的感知稳定性,参考DN-DETR中的去噪方案,为局部地图感知提出一种针对局部地图元素的加噪声方案以及去噪逻辑。…

Editable Scene Simulation for Autonomous Driving via Collaborative LLM-Agents
ChatSim:首个通过大语言模型实现可编辑逼真3D驾驶场景的仿真 论文链接:https://arxiv.org/pdf/2402.05746.pdf 代码链接:https://github.com/yifanlu0227/ChatSim 1. 摘要(Abstract)
自动驾驶中的场景仿真因其生成定制…
ROS-Ubuntu20.04环境安装
1.系统和ROS版本
操作系统:Ubuntu20.04
ROS版本:ROS noetic
2.安装步骤
1.配置ROS软件源
sudo sh -c echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list
2.配置密钥…
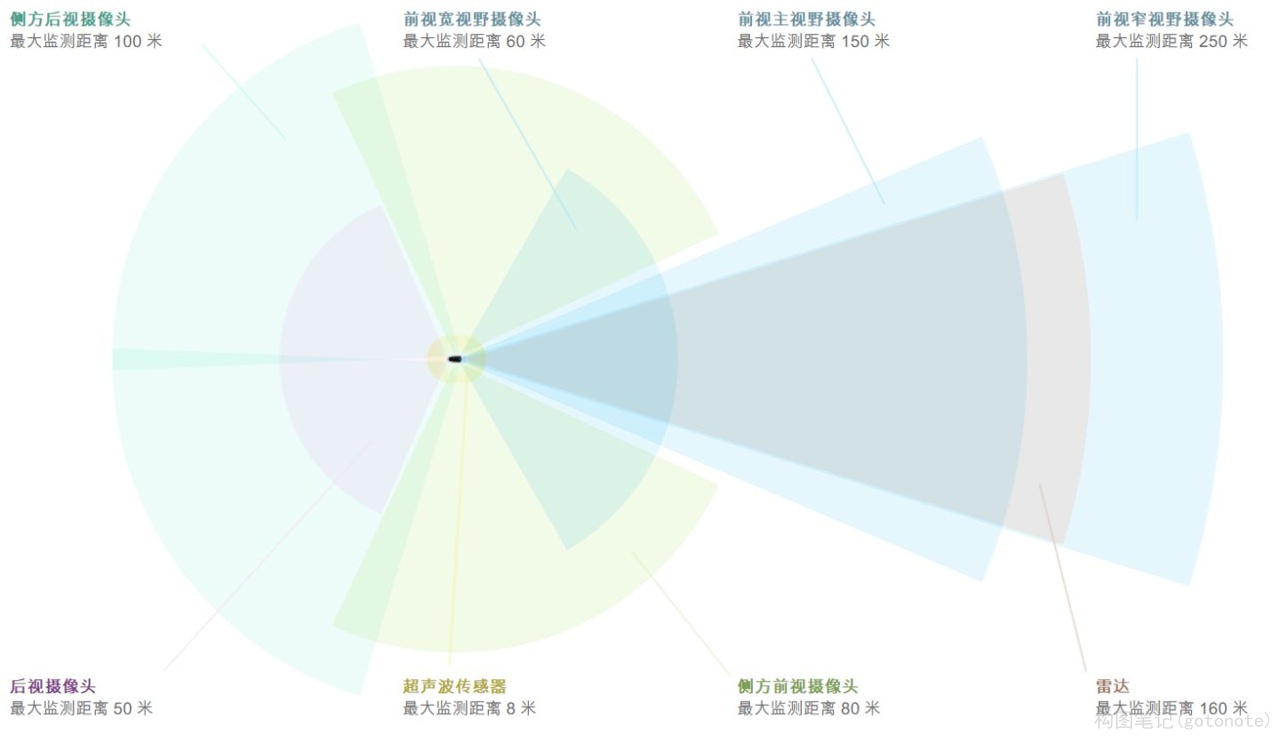
自动驾驶---Motion Planning之LaneChange
1 背景 在Apollo中,有比较多的Decider(决策器),上篇博客《自动驾驶---Motion Planning之Decider》中笔者也大概介绍了每个Deicder的作用。 本篇博客笔者主要介绍换道的决策内容,因为在自动驾驶中(严格意义上来讲,目前还属于辅助驾驶),变道的灵活性是用户评价该功能是否…
自动驾驶 - 滤波算法
自动驾驶 - 滤波算法
目前比较常用的滤波算法有: 平均值滤波算法 中位值滤波算法 一阶滤波算法 卡尔曼滤波算法
1. 平均值滤波算法
1.1. 算法介绍
平均值滤波算法是比较常用,也比较简单的滤波算法。在滤波时,将N个周期的采样值计算…
![[algorithm] 自动驾驶 规划 非线性优化学习系列之1 :车辆横向运动动力学详细解释](https://img-blog.csdnimg.cn/direct/83d33407169c4a01ae2b2a654f9e7023.png)
[algorithm] 自动驾驶 规划 非线性优化学习系列之1 :车辆横向运动动力学详细解释
写在前面
最近时空联合规划很火,想学习。由于在学校主打学习新能源电力电子方向,转行后也想好好零散的知识体系。计划从车辆运动动力学习,模型预测控制(经典控制目前看主打应用,不会再去深入),…
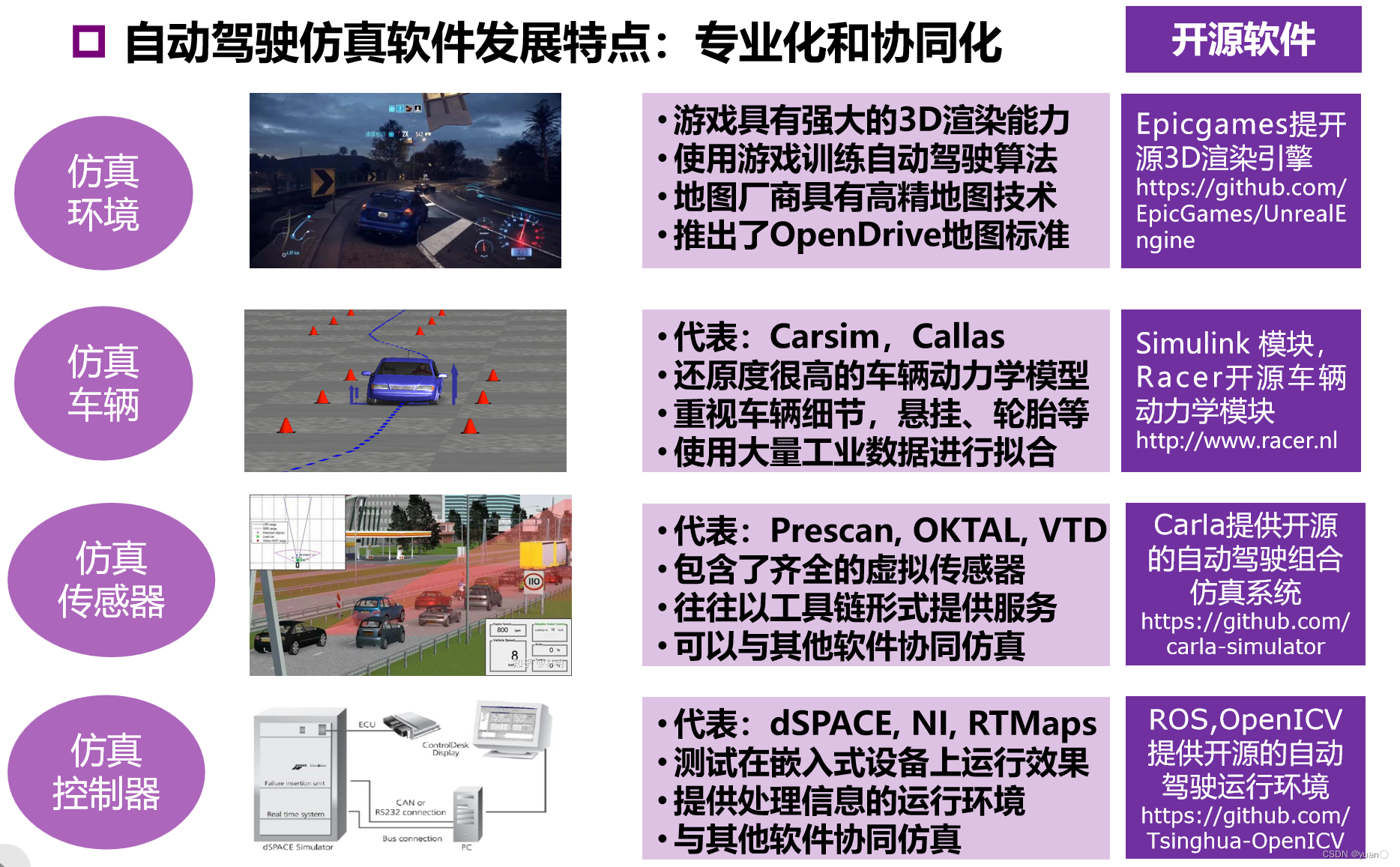
自动驾驶感知——环境感知的基本概念
文章目录1. 智能汽车概述1.1 汽车新四化1.2 智能网联汽车1.3 SAE J3016自动驾驶分级标准2. 环境感知定义2.1 智能网联汽车系统架构2.2 环境感知定义及对象3. 各类传感器的介绍4. 环境感知经典算法概述5. 自动驾驶仿真软件的功能5.1 背景介绍5.2 自动驾驶仿真软件平台背后的科学…
自定义速腾激光雷达点云XYZIRT格式并调用PCL库进行滤波
目录一、试验程序源代码1.1需要包含的头文件1.2定义点云结构1.3主函数1.4 CMake文件二、学习pcl::PCLPointCloud2::Ptr2.1区别2.2转换2.3心得Windows 10 Ubuntu 20.04 VS Code激光雷达速腾RS-LiDAR-32 sdk v1.5.7 速腾激光雷达的ROS程序包可以输出XYZIRT格式,但是…
ROS笔记(6)——自定义消息类型
在ROS中,可以使用自定义消息类型来表示应用程序中使用的特定数据类型。自定义消息类型可以用于发布和订阅ROS主题,也可以用于ROS服务和ROS动作等。下面是在ROS中创建自定义消息类型的步骤: 1.创建消息目录
首先,需要创建一个包含…
路径规划 | 图解RRT*算法(附ROS C++/Python/Matlab仿真)
目录 0 专栏介绍1 图解RRT*算法原理2 ROS C++算法实现3 Python算法实现4 Matlab算法实现0 专栏介绍
🔥附C++/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等);局部规划(DWA、APF等);曲线优化(贝塞尔曲线、B样条…

ubuntu搭建 自动驾驶单目3d检测smoke 环境
论文:SMOKE:Single-Stage Monocular 3D Object Detection via Keypoint Estimation 论文链接 源码 操作系统:ubuntu18.04 显卡:RTX2080TI
一、搭环境(前面和GitHub上一样,补上我踩的坑) 1.创建虚拟环境
conda create…
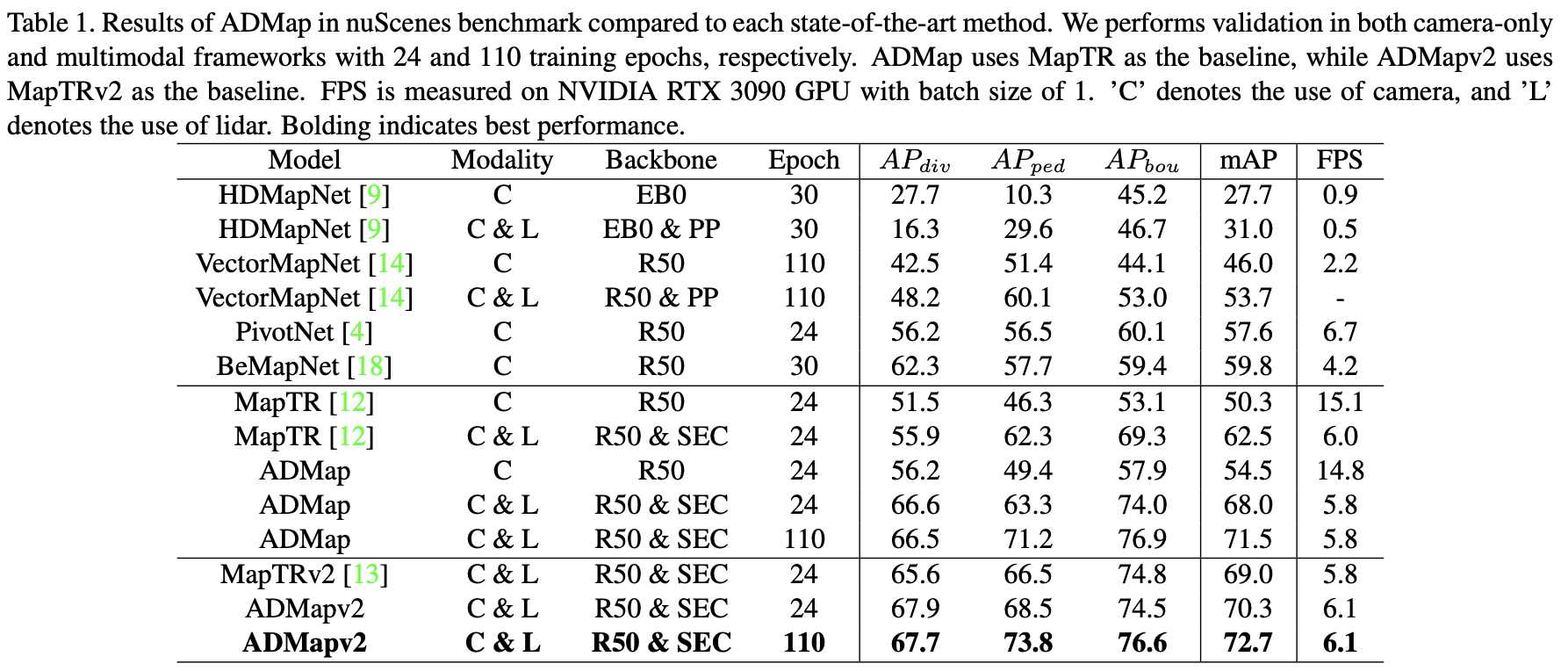
ADMap:Anti-disturbance framework for reconstructing online vectorized HD map
参考代码:ADMap
动机与出发点 局部地图构建算法在实际中会遇到部分车道线偏离的或是错误的情况,这往往是全局信息获取上存在欠缺,毕竟地图元素的回归很依赖于全局信息的获取。那么从特征提取、attention layer设计和loss构建上可以做一些工作…
【ROS2实验】 建立webot仿真系统
一、说明 webot是仿真平台,与gazebo类似。本文详细叙述,如何安装webot,创建仿真包,以及仿真需要的必要文件和配置。
二、准备活动
2.1 安装支持包
sudo apt update
sudo apt install ros-humble-webots-ros2-driver
source /opt/ros/humble/setup.bash
下列图片告诉大家…
自动驾驶模拟环境与测试 - 从Carla和AirSim开始
摘要:自动驾驶系统的开发和验证依赖于功能强大的仿真环境,如Carla和AirSim。这些环境为自动驾驶系统的测试提供了现实世界的交通场景。本文将介绍Carla和AirSim这两个主流的自动驾驶仿真环境,并分享如何在这些环境中进行系统测试和验证的Pyth…
深度学习与自动驾驶:常用深度学习模型及其应用
在自动驾驶领域,深度学习模型已经变得非常重要,可以帮助自动驾驶汽车更好地处理复杂的道路环境。本文将介绍自动驾驶中常用的深度学习模型,如卷积神经网络(CNN)和循环神经网络(RNN),…

ROS从入门到精通8-2:构造动态多行人可视化仿真环境
目录0 专栏介绍1 社会性导航2 动态多行人环境3 代码实现3.1 Gazebo可视化插件3.2 Rviz可视化插件3.3 环境效果0 专栏介绍
本专栏旨在通过对ROS的系统学习,掌握ROS底层基本分布式原理,并具有机器人建模和应用ROS进行实际项目的开发和调试的工程能力。
&…
【自动驾驶100问】第九问:SLAM是什么?
【自动驾驶100问】第九问:SLAM是什么? 视频 博主是《学习OpenCV4:基于Python的算法实战》和《深度学习计算机视觉实战》图书的作者,目前从事自动驾驶感知融合算法与SLAM算法开发,分享内容包括深度学习、计算机视觉、Op…

未来城市的微小单元:滴滴即将量产无人车
汽车诞生之后就一直作为除了家庭与公司之外的「第三空间」存在,技术的脚步从未停止过开发汽车的更多可能。尤其无人驾驶技术的出现,进一步解放了驾驶者,也让人们对于这一能够自主移动的第三空间充满了想象。作为未来城市的微小组成单元&#…
48.在ROS中实现local planner(1)- 实现一个可以用的模板
有了之前45.在ROS中实现global planner(1)- 实现一个可以用模板的global planner的经验, 现在再去创建一个local planner的包就容易多了
1. 创建包
创建
cd ~/pibot_ros/ros_ws/src # 这里可以使用自己的ros workspace
catkin_create_pkg sample_loc…

【OpenAI】基于 Gym-CarRacing 的自动驾驶练习项目 | 路径训练功能的实现 | GYM-Box2D CarRacing
限时开放,猛戳订阅! 👉 《一起玩蛇》🐍
💭 写在前面: 本篇是关于多伦多大学自动驾驶专业项目的博客。GYM-Box2D CarRacing 是一种在 OpenAI Gym 平台上开发和比较强化学习算法的模拟环境。它是流行的 Box2…
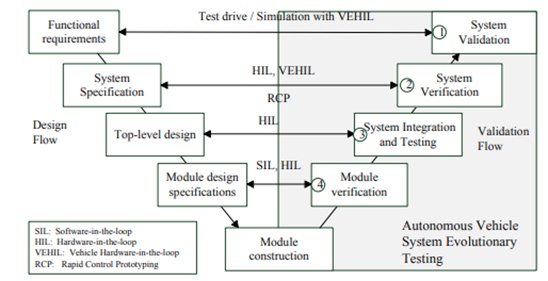
自动驾驶仿真测试介绍
作者 | 楼泽如 上海控安可信软件创新研究院研发工程师
来源 | 鉴源实验室 01
引 言
自动驾驶汽车的兴起,正在重新定义汽车行业。随着自动驾驶技术的发展,自动驾驶汽车将会大大提升交通安全、减少事故发生、减少交通拥堵、提高公路容量等等࿰…
(02)Cartographer源码无死角解析-(16) SensorBridge→回调函数之数据流向分析
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-接如下(有兴趣的朋友可关注计算机视觉life 进行学习): (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
辅助驾驶功能开发-功能规范篇(16)-2-领航辅助系统NAP-匝道跟车基础功能
书接上回
2.3.3匝道辅助驾驶 匝道辅助驾驶功能根据导航引导在ODD范围内辅助驾驶车辆进出匝道,主动变道并入或开出主路,并可根据导航路线引导车辆通过跨高速连接路。
前置条件:
1)驾驶员设置导航目的地及导航路线
2)开启辅助驾驶功能,系统进入NOA功能
2.3.3.1.上下匝道…

基于ros1的 apollo 7.0.0规划控制算法
apollo.ros-7.0.0
上次给大家带来了之前学习apollo时开发的内容apollo.ros-1.0.0和apollo.ros-3.0.0,主要是针对apollo 1.0.0和3.0.0版本进行了ros1下的移植和规划控制算法的学习。本次在之前工作的基础上,针对apollo 7.0.0版本,进行了ros1下…
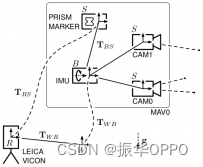
视觉SLAM数据集(二):EuRoC DataSet
本文展示了在微型飞行器(MAV)上收集的视觉惯性数据集。数据集包含立体图像、同步 IMU 测量以及精确的运动和结构地面实况。 这些数据集发表于:M. Burri,J. Nikolic,P. Gohl,T. Schneider,J. Reh…
2021年育婴员(五级)考试题及育婴员(五级)考试报名
题库来源:安全生产模拟考试一点通公众号小程序
安全生产模拟考试一点通:育婴员(五级)考试题考前必练!安全生产模拟考试一点通每个月更新育婴员(五级)考试报名题目及答案!多做几遍&a…
多传感器融合SLAM --- 10.LIO-SAM前端代码分析 imuPreintegration.cpp
目录 0.流程图
1.main函数
2 IMU预积分类
2.1 代码详细注释
2.2 分块讲解--构造函数讲解
辅助驾驶功能开发-功能对标篇(16)-NOA 城市辅助系统-毫末智行
1.横向对标参数 厂商毫末智行车型魏牌摩卡DHT-PHEV上市时间发布:2022年8月30日 上市:2022年底前方案12V5R2L+1DMS摄像头前视摄像头*3【800W】侧视摄像头*4后视摄像头*1【800W】环视摄像头

Ubuntu 22.04.2 LTS安装Apollo8.0
本人硬件环境:
CPU:Intel Core i7 6700
显卡(GPU):NVIDIA GTX 3080 10G
内存:SAMSUNG DDR4 32GB
硬盘:双SSD系统盘 2T,双系统(windows,ubuntu) 一、安装Ubuntu 22.04…
科学中心有能力重新定义城市社区及其周围环境 为可持续发展助力
在缺少能见度和没有GPS的未知区域,利用无人机代替人工,关键时刻可能可以挽救生命。以水电输水隧道的人工检测为例:耗时、成本高且不精确,另外会带来健康和安全风险,例如跌落、结构倒塌、危险气体泄漏甚至爆炸。 由…

(02)Cartographer源码无死角解析-(56) 2D后端优化→class MapById、MapById::lower_bound
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
LoopClosing
LoopClosing类是ORB_SLAM2算法中的闭环检测模块。闭环检测在SLAM系统中起着非常关键的作用,它可以检测到机器人在环境中已经访问过的地方,通过消除累积误差来优化地图。LoopClosing类与跟踪(Tracking)、局部地图构建(L…
os.environ
1、os.environ["CUDA_DEVICE_ORDER"]"PCI_BUS_ID"#按照PCI_BUS_ID顺序从0开始排列GPU设备 2、os.environ["CUDA_VISIBLE_DEVICES"]"0"#设置当前使用的GPU设备仅为0号设备 设备名称为‘/gpu:0 3、os.environ["CUDA_VISIBLE_DEVICE…
AutoSar之DaVinci开发环境
文章目录 前言一、AutoSar架构简介二、开发环境组成1.DaVinci Developer2.DaVinci Configurator3.SIP 总结 前言
作为初学者,接触AutoSar的开发,除了需要掌握基本的AutoSar架构知识外,还需要熟悉设计和配置AutoSar的工具链。接下来我会以Vec…
GVINS数据采集(u-blox fp9 + D435i)
注意 注意 注意!!!!!!!!!!!!!!!! 数据采集的时候,Ublox_F9P模块 + IMU模块 + Camera模块 对应三个USB串口信息,在写程序的时候一定把串口对应正确 ! 1、配置千寻的RTK账号 采集数据当天购买千寻的RTK账号,然后在Window下,输入账号和密码 (具体的步骤如之前…

VINS-Mono 代码解析一、前端
目录 一、前言
二、程序解析 2.1 参数读取 2.2 读取相机对应的相机内参
2.3 判断是否加入鱼眼 mask 来去除边缘噪声
2.4 订阅话题
4、对最新帧forw的特征点的提取和光流追踪(核心)
5、对新加入的特征点更新全局id
6、发布到pub_img
7、将图像封装到cv_bridge::cvtColo…

VINS-MONO代码解读---回环检测与重定位、四自由度位姿图优化
本文主要介绍VINS的闭环检测重定位与位姿图优化部分,作为系列文章的最后一节。
回环检测的关键就是如何有效检测出相机曾经经过同一个地方,这样可以避免较大的累积误差,使得当前帧和之前的某一帧迅速建立约束,形成新的较小的累积…
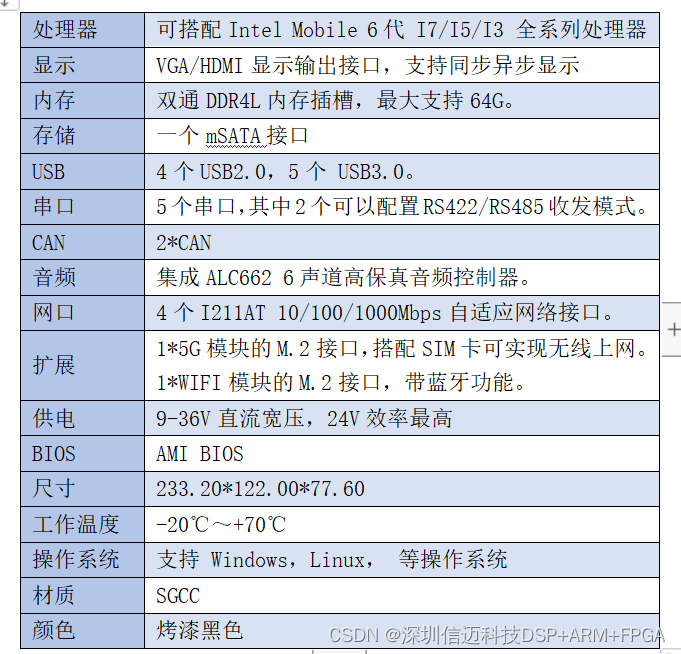
自动驾驶规划控制软硬一体化控制器解决方案(一)
随着社会的进步,汽车工业和电子科技发展迅速,车载电子器件的数量越来越多,汽车 电子的平台集成度越来越高,两者的融合正在革新着人们的驾乘体验。本文基于 x86 SoC 进 行系统设计,实现高效的汽车智能驾驶舱技术和高级驾…
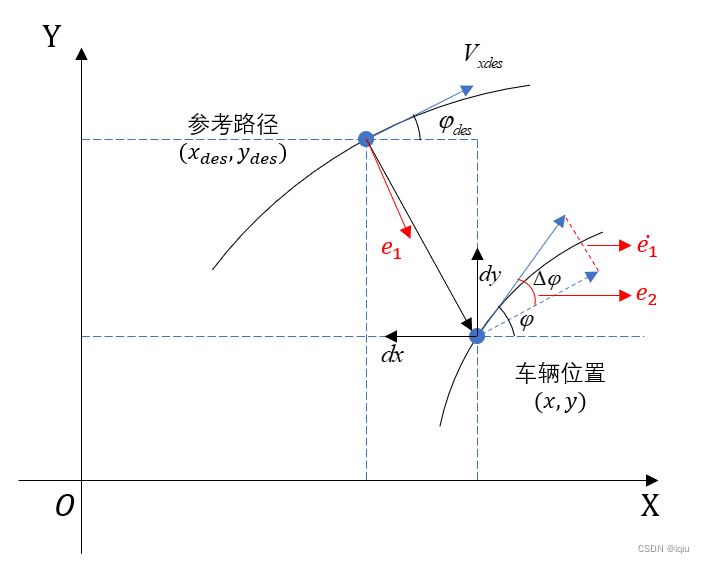
Apollo控制部分3-- 车辆动力学模型详解
Apollo控制部分3-- 车辆动力学模型详解摘要一、预备知识二、轮胎坐标系三、车辆自行车模型公式推导四、参考路径误差模型author:Wutong time:2023-03-17 20:05
摘要
动力学模型分析是整个无人车控制模块的基础,同时也是动力学模型是否准确也…
汽车电子实现车联网的几个关键模块
汽车里有好多的ECU,哪些会是实现车联网的关键模块呢?有人说肯定是车机中控IVI,因为这里可能是汽车所有信息的汇集点,往车里面看,通过网关GateWay连接着汽车CAN总线网络,可以通过OBD诊断出汽车各ECU(Electronic Control Unit)的信息,通过车辆车身控制模块BCM(Body Con…
SLAM学习快速入门---CMake简单、基础语法
前言 研究生阶段开启SLAM的旅程,从此篇博文起会开启一个新的SLAM专题,用以记录入门过程中的问题解决以及笔记分享,内容大多会涉及应用,原理剖析有能力的话后续会添加进来。如有纰漏,敬请指正! 今天记录CMak…
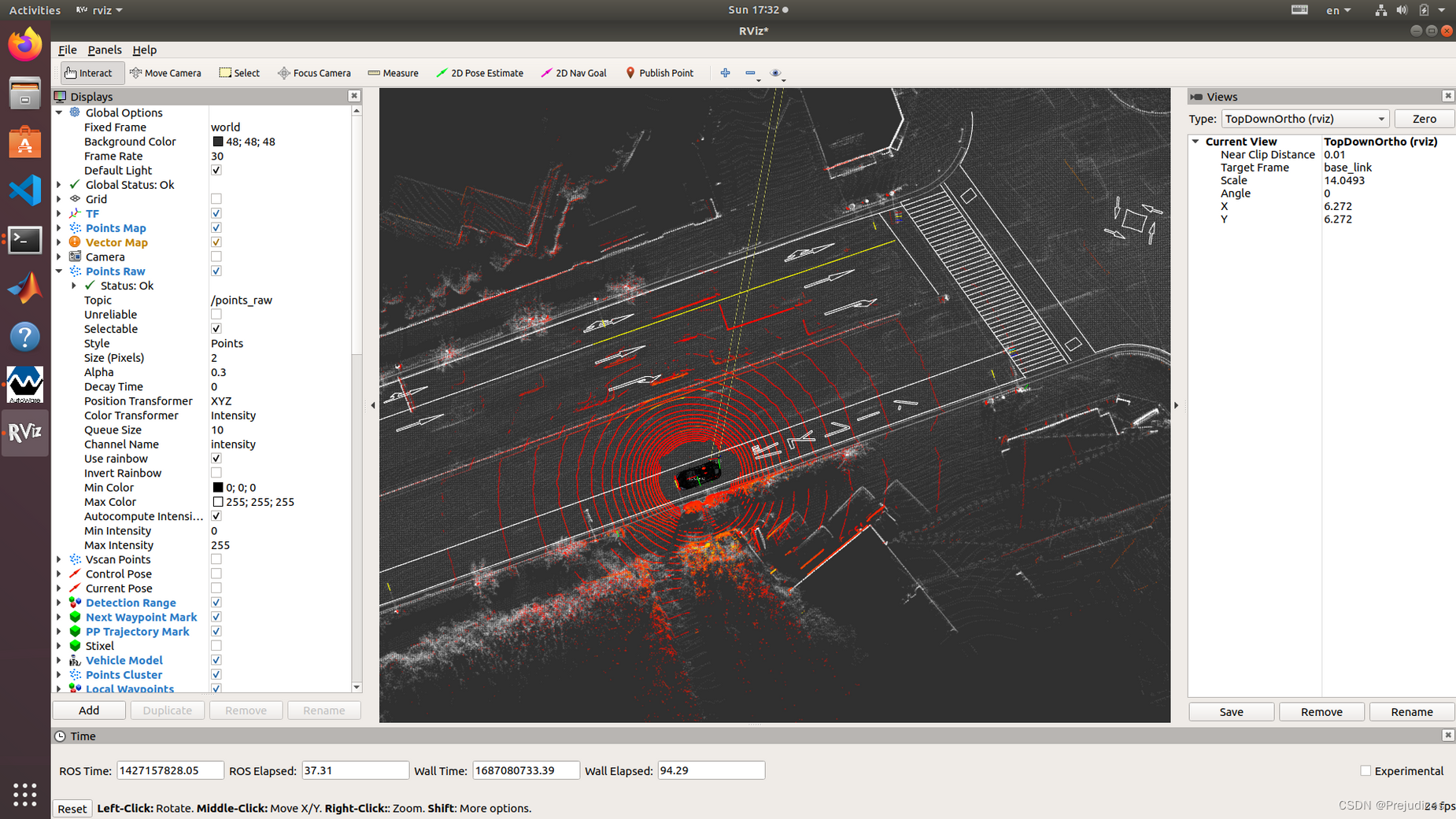
Autoware 跑 Demo(踩坑指南)
Autoware 跑 Demo(踩坑指南)
网上的博客和官方的教程,几乎都是一样的,但实际上跑不起来 Autoware 1.12学习整理–01–运行rosbag示例 Autoware入门学习(三)——Autoware软件功能使用介绍(1/3&a…

英飞凌 AURIX-TC3XX:QSPI通信实验
目录 AURIX-TC3XX-QSPI通信实验1.QSP简介1.1、AURIX TC3XX QSPI个数1.2、QSPI功能特点1.2.1、QSPI外设的新特性1.2.2、一些独特的特性1.2.3、支持传统的SPI特性1.2.4、四种可供用户选择的传输模式 2、具体实验操作2.1、新建工程2.2、实验一 3、域控制器中常见的SPI通信方式3.1、…
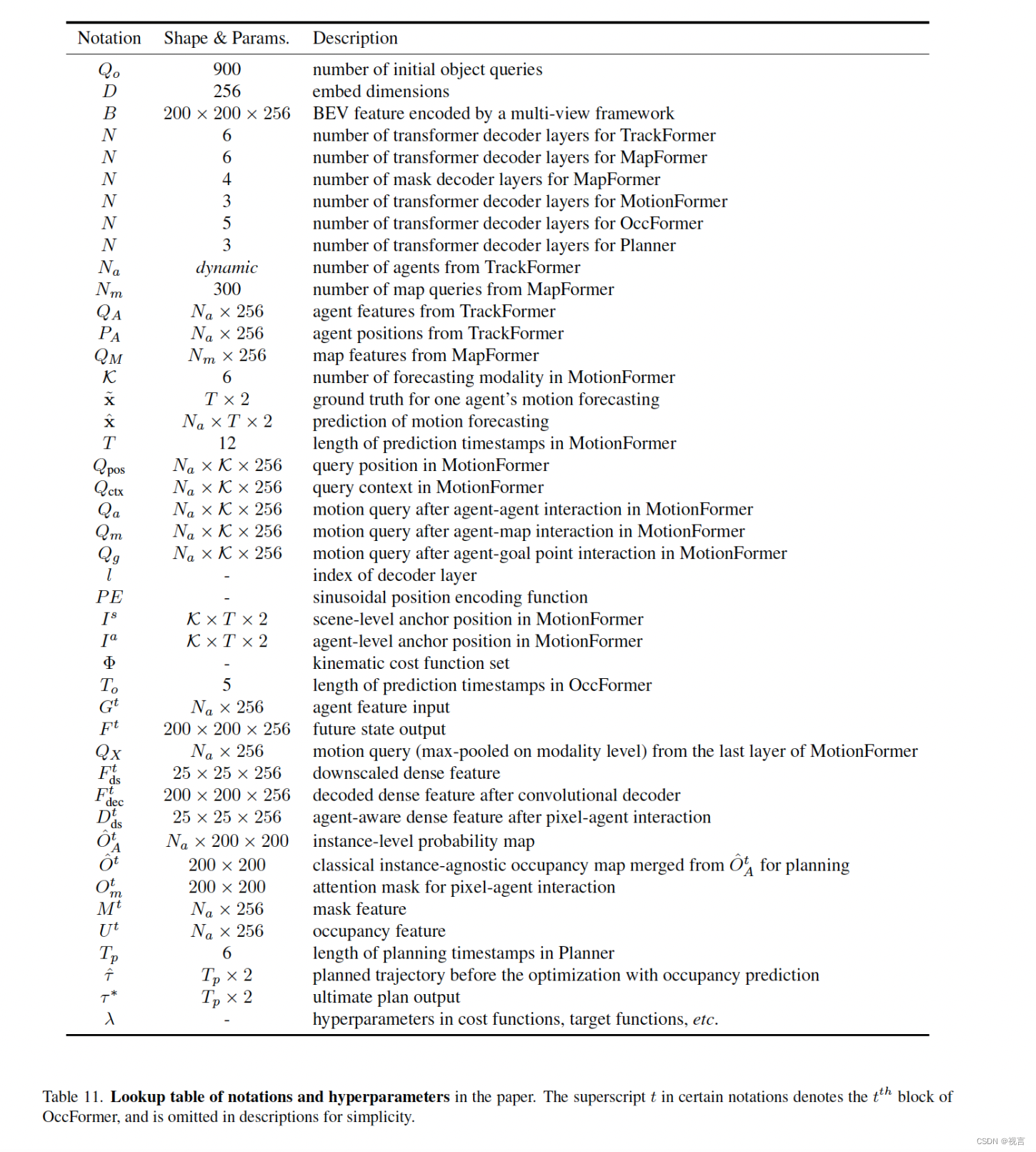
Planning-oriented Autonomous Driving 解析
abstract
现代自动驾驶系统通常是模块化的序列任务,这种方式很容易造成累积误差和任务协调不足,因此设计一个端到端架构,从全局的视角出发为agent的交互提供互补的特征提取。
introduction (a) Most industrial solutions deploy separate …

在can协议的基础下编写DBC文件,然后使用该DBC文件下发can协议到底盘完整流程
目录 前言一、VectorCANdb下载及安装二、DBC文件的编写1.新建dbc文件2.建立dbc2.1根据CAN协议设置以下的signals2.2设置报文2.3建立报文与信号的关系2.4建立节点 三、编写程序使用UDP通信下发can协议1.查看can口、电脑ip以及端口号2.编写测试程序 前言
最近完成了一个项目&…

SLAM面试笔记(3) - 视觉SLAM
目录
1 紧耦合、松耦合的区别
(1)紧耦合和松耦合的区别
(2)紧耦合和松耦合的分类
(3)为什么要使用紧耦合
2 SIFT和SUFT的区别
3 视差与深度的关系
4 闭环检测常用方法
5 描述PnP算法
6 梯度下降法…

AutoCV第三课:Python和ML基础
目录Python和ML基础前言1.闭包1.1 基本概念1.2 作业2.sqrt(2)2.1 传统方法2.2 梯度下降法2.3 牛顿法3.拓展3.1 常用函数的导数3.2 链式法则3.3 作业总结Python和ML基础
前言 手写AI推出的全新保姆级从零手写自动驾驶CV课程,链接。记录下个人学习笔记,仅…

大模型多模态Chatgpt+自动驾驶控制器设计方案
/导读/
最近的科技圈,大家都被微软推出的ChatGPT刷屏,作为工智能公司OpenAI于2022年11月推出的聊天机器人,其能够通过学习和理解人类的语言来进行对话,还能根据聊天的上下文进行互动,甚至能完成撰写邮件、视频脚本、文…
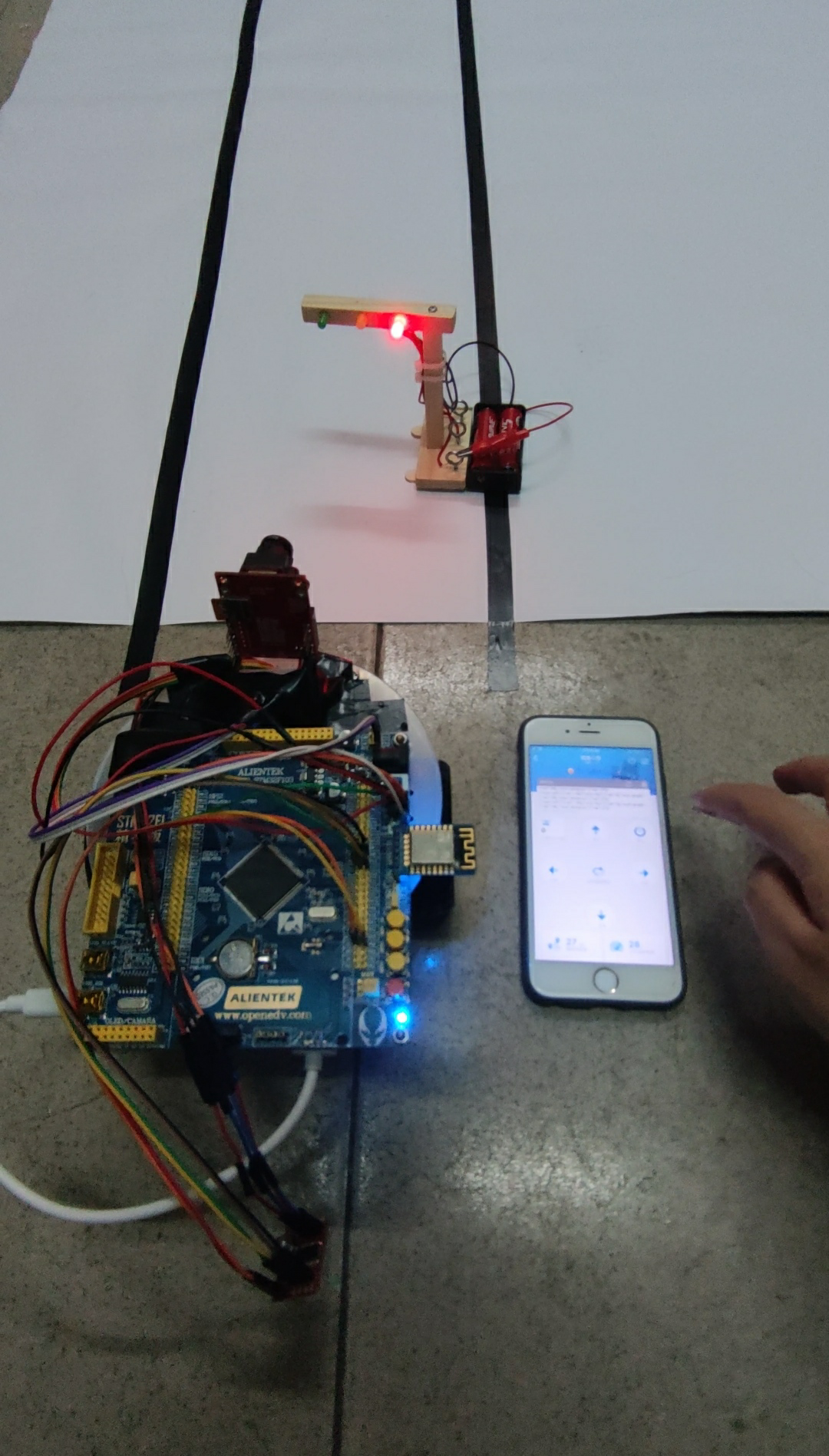
基于OpenMV的自动驾驶智能小车模拟系统
一、项目简介
基于机器视觉模块OpenMV采集车道、红绿灯、交通标志等模拟路况信息,实现一辆能车道保持、红绿灯识别、交通标志识别、安全避障以及远程WiFi控制的多功能无人驾驶小车。
赛道规格: 1、编程所需软件:
OpenMV:使用Op…
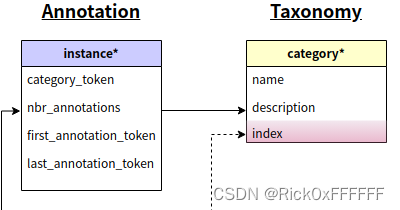
nuscenes instance 调研笔记
nuscenes instance 调研笔记:
前言
nuscenes这个自动驾驶数据集挺大,官方devkit还提供了各种操作用于提高科研人员的效率,但是吧,东西多了学起来就乱七八糟的,本文仅以提取每个instance关联的所有images为例子&#…
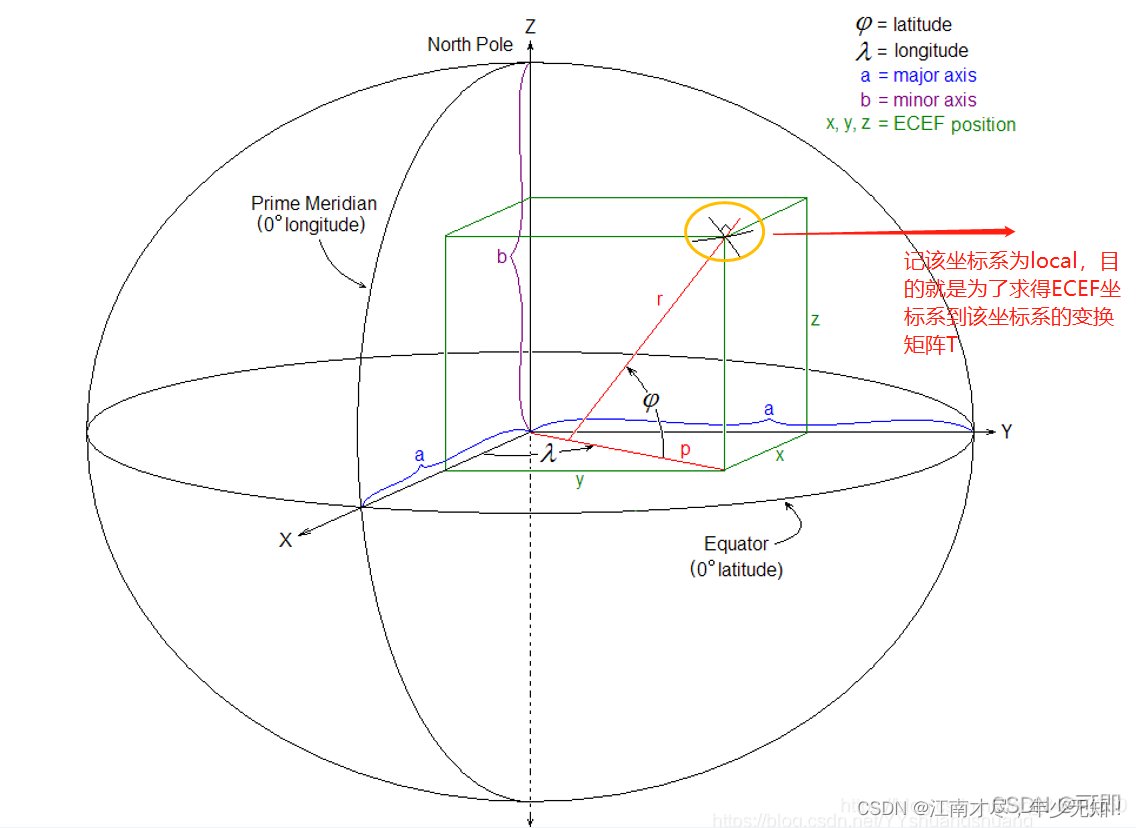
(02)Cartographer源码无死角解析-(18) SensorBridge→landmark、Imu、GPS 数据坐标系变换
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
(02)Cartographer源码无死角解析-(15) Node::AddTrajectory()→回调函数之数据流向分析
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
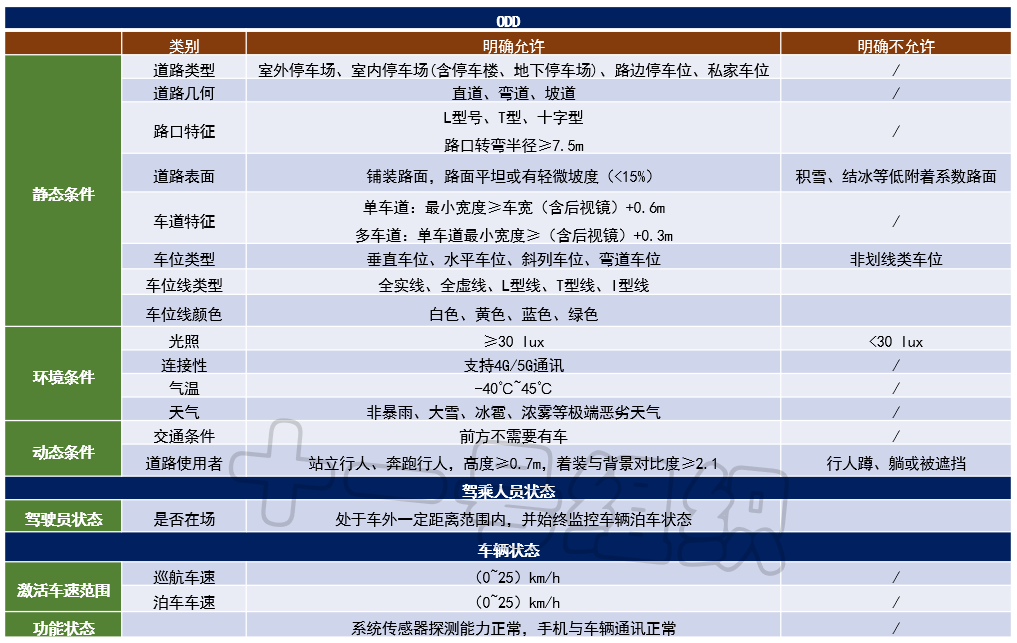
L0到L4级别下的泊车功能设计详解(上)
摘要:
乘用车自动驾驶/辅助驾驶按场景分主要包括城区场景、高速场景和泊车场景。 媳妇和我工作地点一南一北,工作地点公共交通又都不方便,在只有一辆车的背景下,我是早送仙女晚接美人,毫无怨言。但看到今年新车层出不…

SLAM中坐标轴旋转及ros的接口解释
读完几个loam算法,满篇的坐标轴旋转,还是手写的(作者,用eigen写不好嘛。。。),我滴天适应了好久…,今天就总结一下坐标轴旋转问题。 一、首先,我们看一下ros中关于欧拉角旋转的函数:setRPY、set…

阿里云助力元戎启行 加速自动驾驶应用落地
曾经在科幻电影中才会出现的自动驾驶汽车,如今已经驶进了真实道路。 在深圳 CBD 中心城区,有多辆 L4 级自动驾驶汽车在人流如织、车流熙攘的路段中行驶着,方向盘兀自向左、向右打转,而安全员双手平放在膝盖上,全程无需…
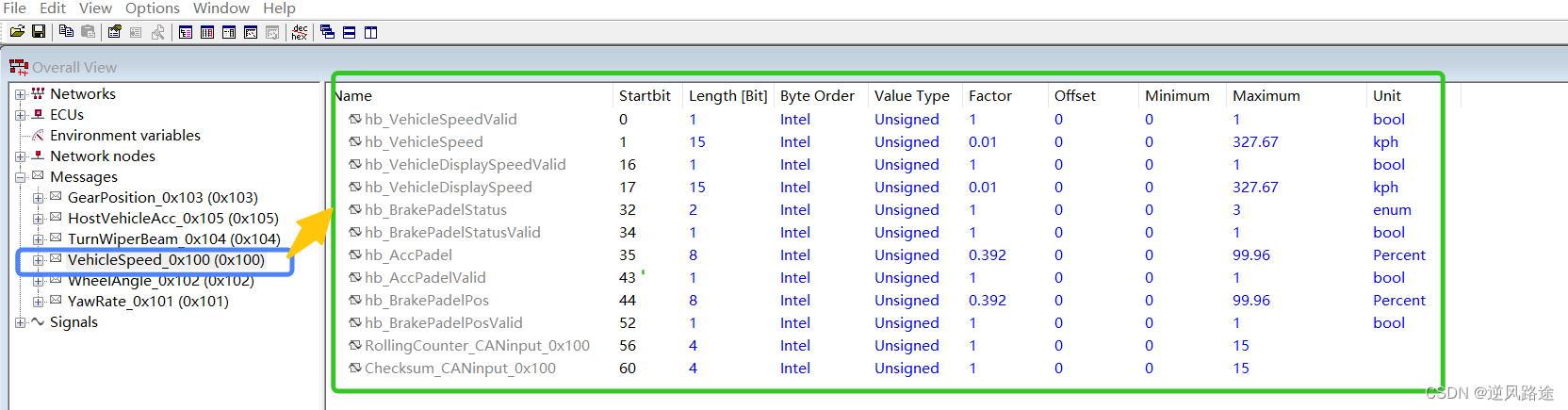
车辆CAN信号,依据DBC文件解析流程
CAN信号解析流程
1.车辆CAN对应dbc文件 DBC文件是一种用于描述CAN(Controller Area Network)数据通信协议的文件格式,DBC文件中包含了CAN数据的信号定义、编码方式、单位、范围等信息,可以用于解析和生成CAN数据帧。 一个DBC文件…
python机器人编程——差速AGV机器、基于视觉和预测控制的循迹、自动行驶(下篇)
目录 一、前言二、基于轨迹与路面重心偏离度误差的预测自动差速小车循迹控制策略三、轨迹图像的处理要点四、本篇部分核心控制策略python代码:五、结论 一、前言
基于最近的测试,得到了一种粗略控制的算法,其控制效果适合单线路和急转弯的情…

从零搭建一台基于ROS的自动驾驶车-----4.定位
系列文章目录
北科天绘 16线3维激光雷达开发教程 基于Rplidar二维雷达使用Hector_SLAM算法在ROS中建图 Nvidia Jetson Nano学习笔记–串口通信 Nvidia Jetson Nano学习笔记–使用C语言实现GPIO 输入输出 Autolabor ROS机器人教程 从零搭建一台基于ROS的自动驾驶车-----1.整体介…
【ORB_SLAM2源代码详细解读|System.cc|1-3】
System::System()
System::System(const string &strVocFile, const string &strSettingsFile, const eSensor sensor,const bool bUseViewer):mSensor(sensor),</
(01)ORB-SLAM2源码无死角解析-(43) EPnP 源代码分析(3)→find_betas_approx(),gauss_newton()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
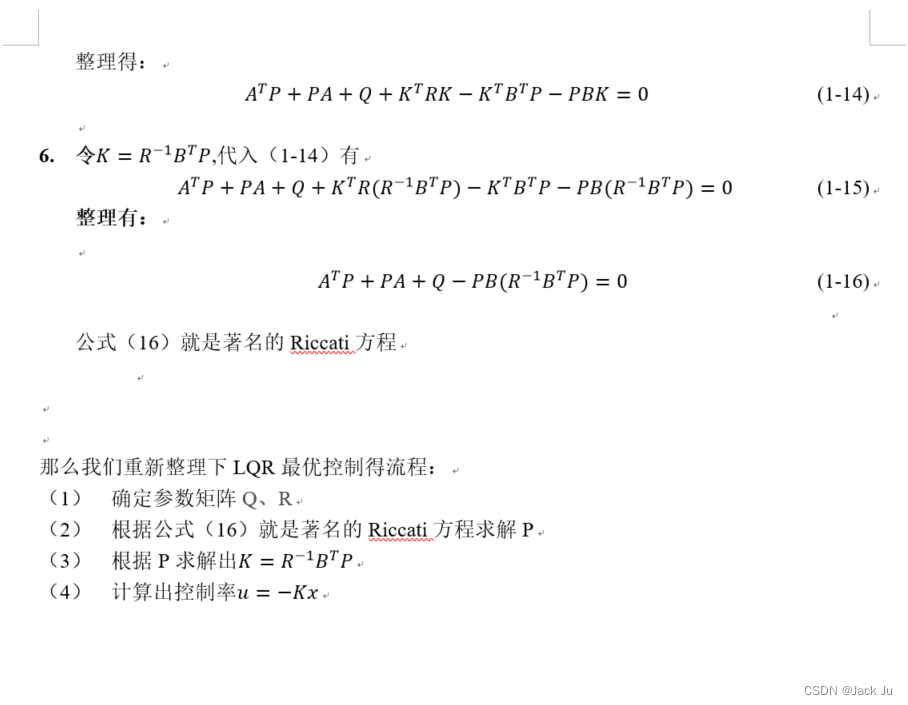
自动驾驶—连续系统LQR最优控制的黎卡提方程推导
1. Why use the Riccati equation?
最优控制算法LQR是Linear Quadratic Regulator的缩写,Q、R就是需要设计的半正定矩阵和正定矩阵。考虑根据实车的情况去标定此参数,从理论和工程层面去理解,如果增大Q、减小R,则此时控制系统响应速度比较快速(比较剧烈),直观反映方向…

(01)ORB-SLAM2源码无死角解析-(28) 双目Stereo相机立体匹配,SAD算法→深度求解
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
【自动驾驶】SimpleTrack论文解读
结合自己的理解,本文会写一些文章解读与代码简单解读。如若觉得有用,欢迎订阅。
1.文章与代码
文章:
SimpleTrack: Understanding and Rethinking 3D Multi-object Trackinghttps://github.com/tusen-ai/SimpleTrack
代码:
https://github.com/tusen-ai/SimpleTrack
…
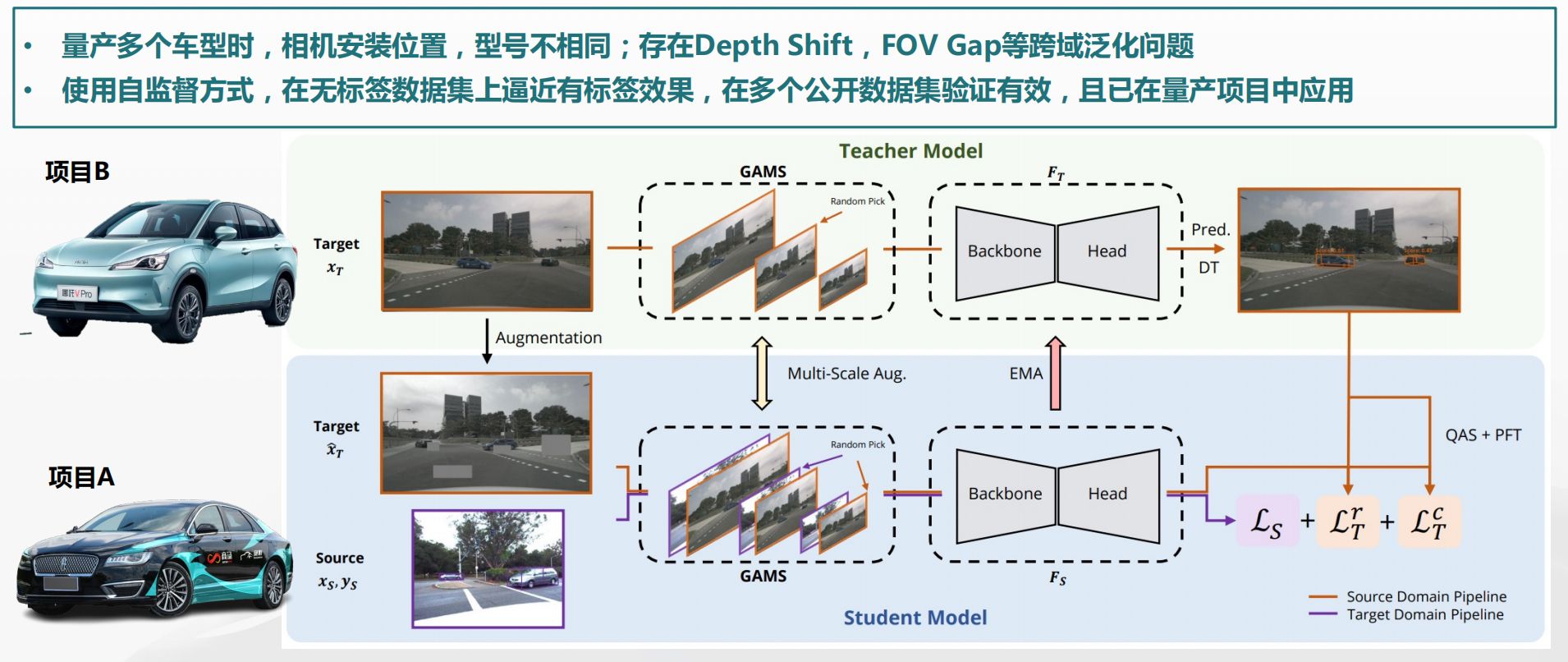
城市NOA转向BEV,头部Tier 1如何笑傲江湖?
主讲|蒋沁宏
编辑|Amy 编者注: 本文是HiEV出品的系列直播「硬核拆解BEV」第三期问答环节内容整理。商汤绝影量产行车智能驾驶研发负责人蒋沁宏,与连线嘉宾寒武纪行歌自动驾驶总监李想、宏景智驾高级工程经理柴可宁、主持嘉宾周琳…
辅助驾驶功能开发-功能规范篇(16)-2-领航辅助系统NAP-智能避让
书接上回
2.3.5智能避让 系统通过车辆上搭载的雷达、摄像头等传感器、V2X设备等,实时感知探测车辆周围存在的障碍物。对自车道前方静止的车辆、缓速的车辆、遗落物、道路凸起、道路凹坑、施工、事故、窄路等影响通行的障碍,以及邻车道加塞的车辆、横向靠近的车辆、较长的货车…
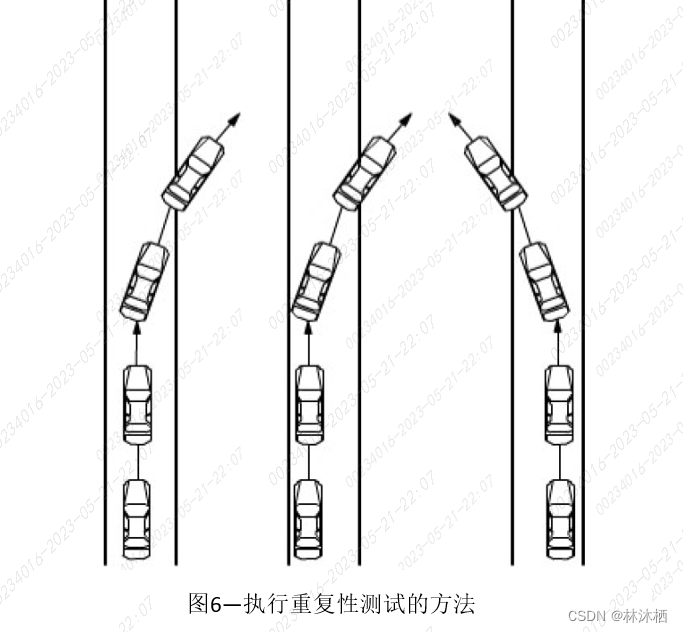
法规标准-ISO 17361标准解读
ISO 17361是做什么的?
ISO 17361全称为智能交通系统-车道偏离警告系统性能要求和测试程序,其中主要描述了LDWS系统的功能要求及测试要求
系统功能
车道偏离警告系统的功能元件应符合图中的要求,抑制请求、车速检测、驾驶员偏好和其他附加功…

BetaFlight Mark4 H7 Dual270 + BN880 + CRSF 配置存档
BetaFlight Mark4 H7 Dual270 BN880 CRSF 配置存档 1. 源由2. 配置2.1 端口2.2 系统2.3 对齐2.4 GPS2.5 救援2.6 PID2.7 Rate2.8 滤波2.9 接收器2.10 模式2.11 电机 3.差异4. 整机效果5. 飞行效果6. 参考资料 1. 源由
手头这台航模四轴,基本调试的差不多…
【运动规划算法项目实战】如何使用MPC算法进行路径跟踪(附ROS C++代码)
文章目录 前言一、简介二、代码实现2.1 trackRefTraj.h2.2 trackRefTrajNode.cpp2.3 trackRefTraj.cpp2.3.1 代价函数2.3.2 约束条件2.3.3 求解最优问题2.4 RVIZ演示三、总结前言
自动驾驶和机器人领域中,路径跟踪是一项关键技术,它使车辆或机器人能够沿着预定轨迹行驶或移动…

赛灵思 ZYNQ UltraScale+ MPSoC Petalinux驱动开发:Linux字符驱动开发
目录 赛灵思 ZYNQ UltraScale MPSoC:Linux字符驱动开发1、Linux驱动程序简介2、Linux字符设备开发步骤2.1、系统调用2.2、驱动模块的加载与卸载2.2.1、驱动加载/卸载方式:2.2.2、驱动注册函数和卸载注册函数2.2.3、字符设备注册与注销2.2.4、实现设备操作…
(01)ORB-SLAM2源码无死角解析-(04)单目追踪_总体框架讲解TrackMonocular→GrabImageMonocular
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(19) 重投影误差,卡方检验→CheckFundamental,CheckHomography
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(02)C++命名规范_总体框架解读
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(02)Cartographer源码无死角解析-(12) Node类初探→构造函数与开始轨迹
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文 末 正 下 方 中 心 提…
(01)ORB-SLAM2源码无死角解析-(52) 局部建图线程→剔除关键帧KeyFrameCulling()、整体线程梳理
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(32) ORB特征匹配→跟踪线程BoW加速匹配,关键帧特征点跟踪SearchByBoW()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
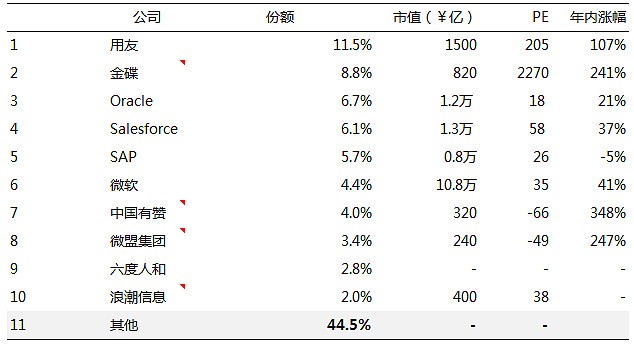
净利下滑52.9%,鲁大师布局SAAS赛道能否逆风翻盘?
8月31日晚,鲁大师发布了截至2021年6月30日的中期业绩报告。财报显示,鲁大师营收、毛利均有所下滑,且净利下滑过半。
可能是受港股科技板块涨幅扩大的影响,9月1日收盘,鲁大师上涨1.02%。 从最初单一的软件测评到线上游…
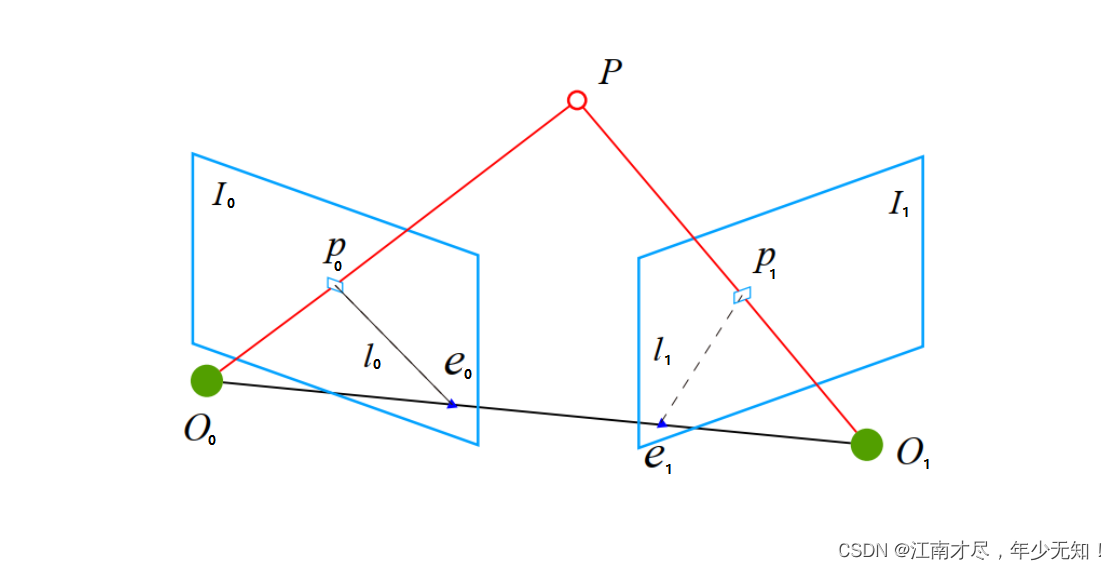
(01)ORB-SLAM2源码无死角解析-(33) ORB特征匹配→局部建图BoW加速匹配,三角化SearchForTriangulation
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…


Lidar和IMU(INS)外参标定----常用开源项目总结
写在前面:博主主要关注的是自动驾驶中Lidar和RTK组合导航设备的标定,大部分的开源项目都把其转化为Lidar和IMU的标定过程。 1. ETH的lidar_align
(Github)A simple method for finding the extrinsic calibration between a 3D lidar and a 6-dof pose …

基于毫米波雷达的手势识别原理
基于毫米波雷达的手势识别原理1 Introduction/简介2 FMCW Radar 原理3 手势识别处理流程4 手势识别及分析1 Introduction/简介
本文以TI的Gesture UserGuide为参考,简述基于毫米波雷达的手势识别原理。
性能要求 可识别如下6种手势:左划、右划、向上、…
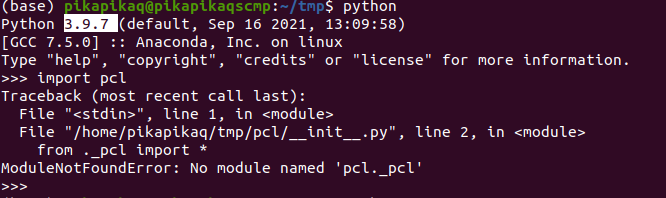
Ubuntu的换源问题python-pcl库安装
前言
我是什么时候意识到,我安装完Ubuntu之后没有换源这个问题很严重的呢…
大概是我要安装python-pcl库,却死活下不动的时候吧…
sudo apt install python3-pcl大概就是这样的疯狂error:
尝试过:
sudo vi /etc/resolv.conf
sudo apt-g…
2021-09-262021年N2观光车和观光列车司机复审考试及N2观光车和观光列车司机模拟考试题
题库来源:安全生产模拟考试一点通公众号小程序
安全生产模拟考试一点通:N2观光车和观光列车司机复审考试考前必练!安全生产模拟考试一点通每个月更新N2观光车和观光列车司机模拟考试题题目及答案!多做几遍,其实通过N2…

史上最简SLAM零基础解读(10.2) - g2o(图优化)→顶点 (Vertex)编程细节
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始 文末正下方中心提供了本人联系方式,点击本人照片即可显示WX→官方认证{\color{blue}{文末正下方中心}提供了本人 \color{red} 联系方式,\color{blue}点击本人照片即可显示WX→官方认证}文末正…

【深蓝学院】手写VIO第3章--基于优化的 IMU 与视觉信息融合--笔记
0. 内容 1. 基于BA的VIO融合
优化的方法学会之后,滤波的方法也就会了。
具体的求解BA问题参考的是SBA的论文,使用的是LM算法(里面有个关于权重μ的计算方法,不同人的实现可能不一样,这些都是实现细节) …
元宇宙被定义为一个包括所有虚拟世界、增强现实和互联网的总和
大量自动驾驶产品开始交付上路。2021年,各类L2~L4级的自动驾驶车辆开始走出封闭路测试验场,走上了真实的城市道路。资料 数据显示,2021年L2级别自动驾驶加速落地,ADAS渗透率持续提升,短期内,2023年市场规模…
【运动规划算法项目实战】如何构建欧几里德符号距离场(附ROS C++代码)
文章目录 前言一、ESDF原理1.1 ESDF的基本概念1.2 构建ESDF的关键步骤1.3 ESDF在路径规划中的应用1.4 TSDF 与 ESDF的区别1.4.1 截断符号距离场(Truncated Signed Distance Function,TSDF):1.4.2 欧几里德符号距离场(Euclidean Signed Distance Field,ESDF):二、构建ES…


假设我们已经计算出了帧间pose变换:将帧间pose转换为全局pose转换
前言
上一篇博客写了 《KITTI Odometry数据集处理:将全局pose转换为帧间pose转换》.
为了验证运算过程是否正确,也为了后续VO计算出来的6D数据进行可视化,于是便有了下面的代码
数学原理
这里的数学原理上一个博客简单介绍了
Show you t…
Python下的KITTI数据集odometry中相机位姿预处理,旋转矩阵转旋转向量
前言
最近在鼓捣KITTI数据集,上一篇绘制了KITTI数据集中odometry的xy数据。之后也进行了一些详细的了解,odometry数据集中每一帧图像的相机坐标都是有12个元素构成,即[R|t],R是旋转矩阵,t是平移向量,今天突…
![[SLAM] opencv-python的3D-2D视觉里程计(参考高老师的视觉slam十四讲)](https://img-blog.csdnimg.cn/0fb0df92fb68491c82bc2115a5fca94e.png)
[SLAM] opencv-python的3D-2D视觉里程计(参考高老师的视觉slam十四讲)
目录项目场景直接上代码实验项目场景
项目参照高老师的《视觉SLAM十四讲》进行实现,主要是为了巩固自己知识,代码仅供参考。
直接上代码
需要注意的是,代码opencv的版本是3.4.2.16(4版本的opencv太新了,好像不兼容&…
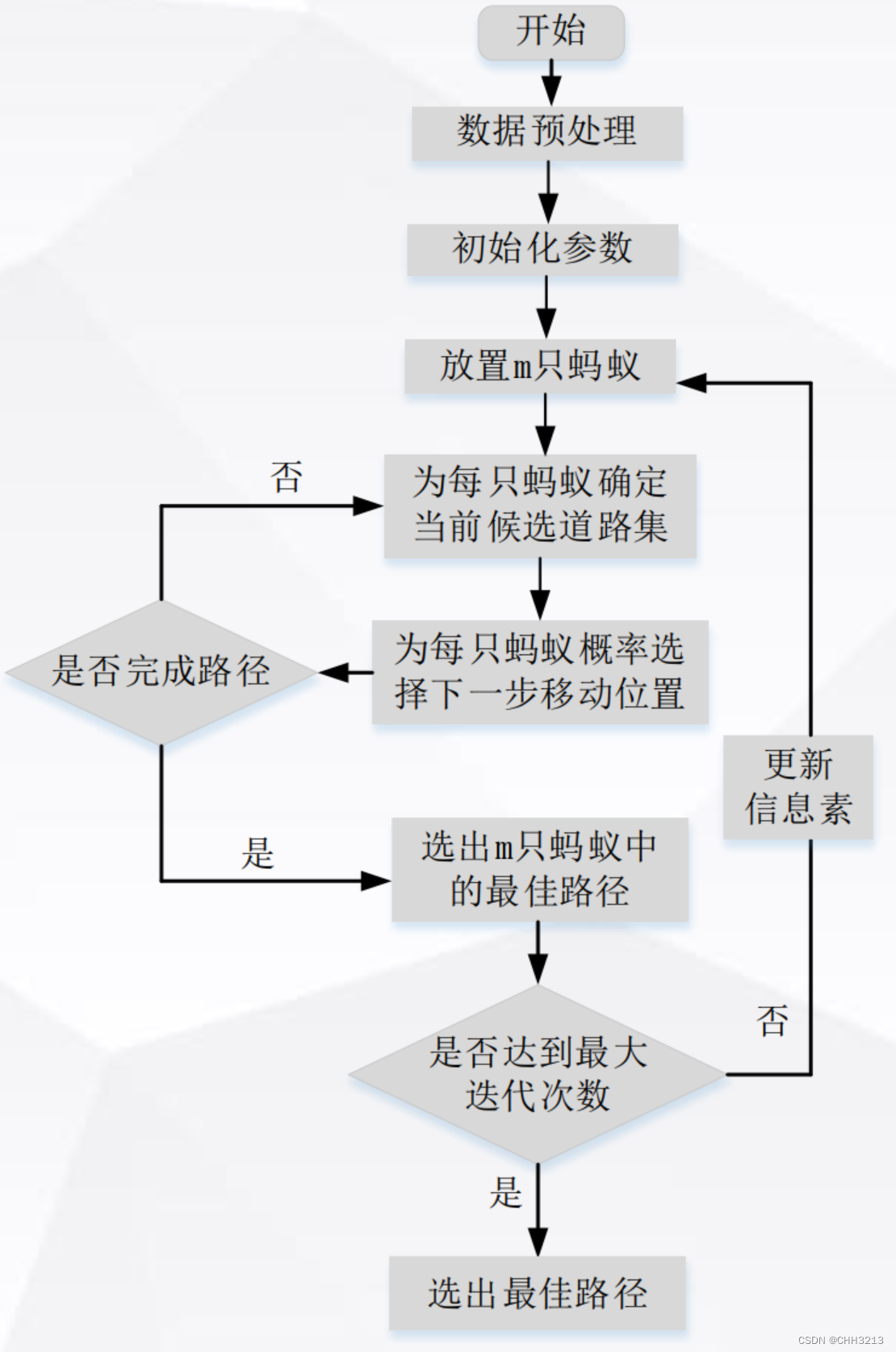
【路径规划】全局路径规划算法——蚁群算法(含python实现)
文章目录 参考资料1. 简介2. 基本思想3. 算法精讲4. 算法步骤5. python实现 参考资料
路径规划与轨迹跟踪系列算法蚁群算法原理及其实现蚁群算法详解(含例程)图说蚁群算法(ACO)附源码蚁群算法Python实现
1. 简介
蚁群算法(Ant Colony Algo…
自动驾驶TPM技术杂谈 ———— 汽车动力蓄电池编码规则
文章目录 定义组成详细定义厂商代码产品类型代码电池类型代码规格代码追溯信息代码生产日期代码序列号梯级利用代码 示例动力蓄电池产品编码示例梯级利用动力蓄电池产品编码示例 定义 动力蓄电池编码是由一组有一定信息含义的数字和英文字母标识动力蓄电池主要属性和唯一性的标…

(01)ORB-SLAM2源码无死角解析-(27) 共视图、本质图、拓展图
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(20) 分解Homography,恢复Rt→Faugeras SVD-based decomposition
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
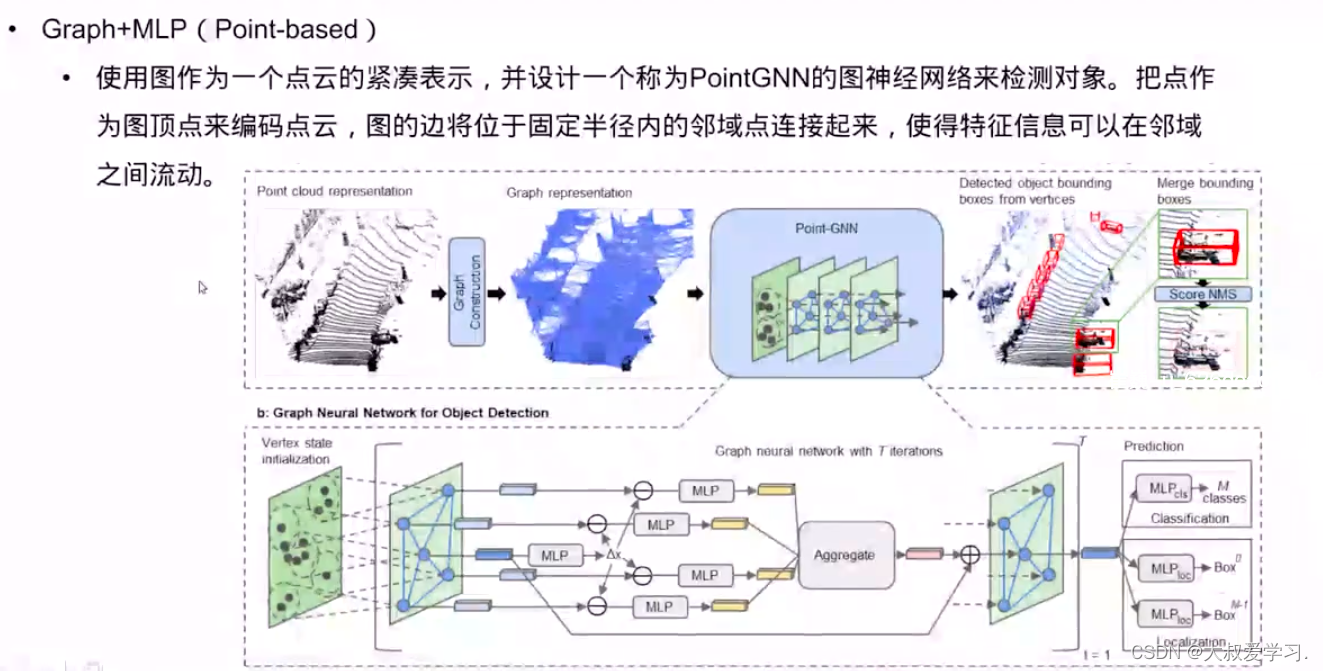
自动驾驶 3D点云深度学习与实践 一 概述
文章目录课程目录自动驾驶中的3D目标检测3D点云开源数据集WaymonuScenes3D点云深度学习现状3D点云基础概念3D点云深度学习分类课程目录 自动驾驶中的3D目标检测 3D点云开源数据集 整个label都是描述在相机坐标系下的。
Waymo nuScenes 3D点云深度学习现状 3D点云基础概念 3D点…
史上最简SLAM零基础解读(3) - 白话来说SVD奇异值分解(1)→原理推导与奇异值求解举例
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始 有兴趣的朋友可以加微信 17575010159 相互讨论技术 - 文末公众号也可关注 一、前言
这篇博客,主要使用最通俗的语言来讲解SVD奇异值分解,通过该篇博客,将知道 SVD 的来龙去脉&…

(01)ORB-SLAM2源码无死角解析-(16) 单目初始化Initializer→八点发求解Homography矩阵
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
ORB-SLAM2系列(四)-特征匹配
ORB-SLAM2系列(四)-特征匹配ORB-SLAM2在不同已知条件和情况下使用了11种匹配方法,下面进行简单总结,具体细节看源码,默认使用八层金字塔,每层最大特征点数:设置数(初始化2000&#x…
(01)ORB-SLAM2源码无死角解析-(15) 单目初始化MonocularInitialization()→Initializer
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
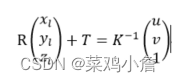
自动驾驶专题介绍 ———— 激光雷达标定
文章目录 介绍激光雷达与激光雷达之间的外参标定激光雷达与摄像头的标定 介绍 激光雷达在感知、定位方面发挥着重要作用。跟摄像头一样,激光雷达也是需要进行内外参数标定的。内参标定是指内部激光发射器坐标系与雷达自身坐标系的转换关系,在出厂之前就已…

GBT 39263-2020 道路车辆 先进驾驶辅助系统(ADAS) 术语及定义
下载地址:
http://www.gb688.cn/bzgk/gb/newGbInfo?hcno10BF00ED36B553FD01605C88DA567824

(01)ORB-SLAM2源码无死角解析-(60) 闭环线程→闭环矫正: CorrectLoop→地图点融合、共视关系更新
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(11)ORBextractor::operator()→BRIEF描述子
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(10)ORBextractor::operator()→灰度质心法
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

Ubuntu16.04 ros kinetic 开机自启动ros相关程序
找不到startup application时在终端输入如下命令: sudo gnome-session-properties
新建一个.sh文件 在sh文件里面写入需要在终端里面启动的命令.格式如下: #! /bin/bash ################# 开头这句话必不可少 source /opt/ros/kinetic/setup.bash # 启动ros环境 gnome-termin…

(01)ORB-SLAM2源码无死角解析-(07)ORBextractor::operator()→构建图像金字塔
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

赛灵思-Zynq UltraScale+ MPSoC:QT与OPENCV交叉编译环境搭建
赛灵思-Zynq UltraScale MPSoC:QT与OPENCV交叉编译环境搭建 1、MPSOC 交叉编译环境简介
使用Linux交叉编译工具在开发中可以摆脱对petalinux的依赖,直接使用Linux交叉编译工具进行编译,可以使开发更加便捷。
由于获取Linux编译工具链需要用…
(01)ORB-SLAM2源码无死角解析-(03)ORB_SLAM2::System之初构造函数解读
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

史上最简SLAM零基础解读(10.4) - g2o(图优化)→示例代码讲解(slam十四讲第二版为例)
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始 文末正下方中心提供了本人联系方式,点击本人照片即可显示WX→官方认证{\color{blue}{文末正下方中心}提供了本人 \color{red} 联系方式,\color{blue}点击本人照片即可显示WX→官方认证}文末正…
(02)Cartographer源码无死角解析-(24) Collator类与数据队列OrderedMultiQueue简介
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…

史上最简SLAM零基础解读(8.1) - 旋转矩阵、旋转向量、欧拉角推导与相互转换
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始 文末正下方中心提供了本人联系方式,点击本人照片即可显示WX→官方认证{\color{blue}{文末正下方中心}提供了本人 \color{red} 联系方式,\color{blue}点击本人照片即可显示WX→官方认证}文末正…

(02)Cartographer源码无死角解析-(14) Node::AddTrajectory()→订阅话题与注册回调函数
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
2021计算机视觉-包揽所有前沿论文源码 -下半年
大家是否遇到过这种情况,就是在工作或者学习的时候,想去找一些方向的网络,但是呢,尴尬的是,老旧的网络里不想要,前沿的网络又不知道有哪些。为了解决大家的这个困扰,本人决定收集2021年上半年大…
三维点云处理02-surface_normal代码实现
三维点云处理02-surface_normal代码实现
基础知识点
surface_normal是PCA的应用,基础知识点与PCA相同,可以查看PCA代码实现
#!/usr/bin/python3import os
import numpy as np
from pyntcloud import PyntCloud
import open3d as o3ddef PCA(data,sort…

荔枝集团战队斩获 2023 Amazon DeepRacer自动驾驶赛车企业总决赛冠军
6月27日,2023 Amazon DeepRacer自动驾驶赛车企业总决赛在上海决出了最终结果,荔枝集团“状元红”战队与Cisco、德勤管理咨询、北京辛诺创新、神州泰岳、敦煌网等12支队伍的竞逐中,在两轮比赛中成绩遥遥领先,最终斩获桂冠。而今年年…
ORB_SLAM3相关博客整理
ORB_SLAM博客整理1、线程调度thread、unique_lock2、(前端)Track主线程三种跟踪方法2.1 MonocularInitialization()初始化2.2 恢复位姿一、 TrackWithMotionModel() 按照恒速模型跟踪上一帧二、TrackReferenceKeyFrame()跟踪上一关键帧三、Relocalizatio…

关于菜菜的我决定开源一个ROS/SLAM仓库的二三事
仓库地址:
GitHub - anxixu0101/ros_code: 一些关于ros/C从入门,进阶,到修仙的代码一些关于ros/C从入门,进阶,到修仙的代码. Contribute to anxixu0101/ros_code development by creating an account on GitHub.https…

自动驾驶-YOLOV5目标检测
1、环境:
操作系统:Ubuntu20.04
Python3.9
Pytorch1.10.2
IDE:(本人使用的是ECLIPSE)
显卡:NVIDIA GeForce GTX 1060 6GB
开源库地址:GitHub - ultralytics/yolov5: YOLOv5 🚀…

RCNN、FastRCNN、FasterRCNN、YOLO、SSD网络结构通俗解读(二):FPN与Mask RCNN
这是目标检测专题系列的第二篇,承接上一篇文章中Faster RCNN的方法。如果Faster RCNN还不熟悉,最好先浏览下。前一篇文章链接在这里。链接: link。 声明:本文主要搬运(加工、整理及扩展)与“懒人学AI”公众号《FPN》与…

advisor纯电动汽车模型 特斯拉仿真模型 tesla model3 可做纯电动汽车再生制动策略仿真
advisor纯电动汽车模型 特斯拉仿真模型 tesla model3 可做纯电动汽车再生制动策略仿真id659892827153&

ENCAP2019新增场景及挑战
1.介绍
2.新增场景及挑战
2.1 CCFtap (Car-to-Car Front turn-across-path ) 场景
场景描述: 主要面临如下新挑战:
摄像头对于车头、车身侧面的检测能力;摄像头FOV的限制,导致对目标检测中断、不连续;雷达对对向临…

Tesla Open AI Day解读
一、前言
2021年08月20日,特斯拉在Open AI Day上介绍了最新的自动驾驶进展。视频YouTube链接、B站链接。智能驾驶三要素:安全、舒适、高效。整个介绍主要分为三个部分,第一部分视觉感知,主要是通过视觉方法实现检测、识别、分割、…

TNT: Target-driveN Trajectory Prediction
概要:
Our key insight is that for prediction within a moderate time horizon, the future modes can be effectively captured by a set of target states 【CC】个人理解核心思想是未来的可能性很多,但是可以通过一组预测状态来刻画。 实际就是后面…
辅助驾驶功能开发-功能规范篇(21)-2-XP行泊一体方案功能规范
XPilot Safety 主动安全系统
五、交通标识识别(Traffic Sign Recognition)
- 产品定义
通过摄像头和地图信息实现根据车辆当前道路前方标识的提示; 交通标识识别是XPilot的重要功能,是为自动驾驶进行决策的重要感知数据来源之⼀。
- 功能说明
SLA(Speed Limit Assist…

CenterFusion: Center-based Radar and Camera Fusion for 3D Object Detection
动机
To exploit the radar information in this setting, radar-based features need to be mapped to the center of their corresponding object on the image, which requires an accurate association between the radar detections and objects in the scene
比较naive…



在自动驾驶中,单线激光雷达能干什么?
导语:本文内容来自宁波傲视智绘光电科技有限公司创始人、董事长朱少岚在硬创公开课的分享,由雷锋网旗下栏目“新智驾”整理。编者按:本文内容来自宁波傲视智绘光电科技有限公司创始人、董事长朱少岚在硬创公开课的分享,由雷锋网(公…
(01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…


(02)Cartographer源码无死角解析-(49) 2D点云扫描匹配→相关性暴力匹配1:SearchParameters
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末正下方中心提供了本…
(02)Cartographer源码无死角解析-(34) LocalTrajectoryBuilder3D→3D点云数据处理,大致流程梳理
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文 末 正 下 方 中 心 提…

一次性学懂卡尔曼滤波
请看我的PPT,学了好久,也有幸得到了大佬指点。 还有代码实现!
# -*- coding: utf-8 -*-
# Python源文件将以UTF-8格式保存
这个实践的已知量是导弹做水平运动,已知导弹每个时刻的速度,和速度测量仪器的标准差是v_std࿰…

HiEV独家|余承东力推L3标准,华为ADS更高阶产品将至
作者 | 张祥威
编辑 | 德新 L3标准出台提速,智驾江湖的厮杀将更加惨烈。 近日,多位接近华为的人士告诉HiEV,余承东正在力推自动驾驶L3标准尽快出台,华为的多位技术专家深度参与了L3标准制定。 本月稍早前,余承东在重庆…


【Matlab配送路径规划】蚁群优化节约算法单中心多城市配送车辆路径规划【含源码 017期】
一、代码运行视频(哔哩哔哩)
【Matlab配送路径规划】蚁群优化节约算法单中心多城市配送车辆路径规划【含源码 017期】
二、VRP简介
1 VRP基本原理 车辆路径规划问题(Vehicle Routing Problem,VRP)是运筹学里重要的研究问题之一。VRP关注有…

Ubuntu16.04编译高博的ORBSLAM2_with_pointcloud_map详细过程
我在编译过程中主要参考了以下几篇博客:
Ubuntu16.04编译高博的ORBSLAM2_with_pointcloud_map_Andyoyo007的博客-CSDN博客编译高博ORBSLAM2_with_pointcloud_map,用TUM数据集测试。_Seven的博客-CSDN博客
编译安装高翔的ORBSLAM2_with_pointcloud_map,…

ORB_SLAM2 源码解析 单目初始化器Initializer(三)
目录 一、地图点初始化
二、重新记录特征点的匹配关系
1、构建旋转直方图 1.1、在半径窗口内搜索当前帧F2中所有的候选匹配特征点GetFeaturesInArea
1.2、表示一个图像像素相当于多少个图像网格列和行
1.4、遍历圆形区域内的所有网格,寻找满足条件的候选特征点&…

自动驾驶 PointNet++ 点云处理原理与代码实战(理论部分)
文章目录PointNet点云处理原理点云处理技术概览PointNet原理解析PointNet原理解析PointNet点云处理原理
点云处理技术概览 Mesh三角形或正方形的面片。Volumetric栅格化。Projected View RGB(D)通过图片不同角度,构成立体的图像。 点云通过激光雷达扫描得到&#x…

数学建模系列-优化模型(二)---图论模型(二)
书接上文,本文来解决最小生成树问题:
1.什么是最小生成树? 最小生成树问题可以简单地理解为将一张各点链接后的无向图。在一个赋权的连通的无向图 G 中找出一个生成树,并使得这个生成树的所有边的权数之和为最小。
先立个FLg&am…

SLAM总结(二)-数学基础之位姿表示
SLAM总结(二)-数学基础之位姿表示注:查阅了很多资料,因为时间有限,可能整理的不是很准确,先发出来,希望有大佬看了能指正一下,后期也会根据对算法的回顾,回过头来不断修正…

2020计算机视觉-包揽所有前沿论文源码
大家是否遇到过这种情况,就是在工作或者学习的时候,想去找一些方向的网络,但是呢,尴尬的是,老旧的网络里不想要,前沿的网络又不知道有哪些。为了解决大家的这个困扰,本人决定收集2020年大部分前…
f1tenth仿真设置
文章目录 一、安装依赖二、进入工作空间克隆三、编译四、运行 一、安装依赖
tf2_geometry_msgs ackermann_msgs joy map_server
sudo apt-get install ros-noetic-tf2-geometry-msgs ros-noetic-ackermann-msgs ros-melodic-joy ros-noetic-map-server
二、进入工作空间克隆…

apollo自动驾驶平台配置笔记
apollo自动驾驶平台配置前言配置要求本机环境apollo安装配置运行demo其他cyber_visualizer 工具程序启动说明前言
最近在开始研究百度apollo自动驾驶开源框架,研究的第一步当然是要先把代码编译成功并把demo跑起来。我在网上找了一些配置教程,个人感觉这…

自动驾驶技术:改变交通出行的未来
自动驾驶技术,这个让人充满期待的技术,正在改变我们的交通方式,带来一种全新的出行体验。它可以让汽车、无人机等交通工具像人类驾驶一样自主行驶,通过人工智能、视觉计算、雷达、监控装置和全球定位系统协同合作,实现…


(02)Cartographer源码无死角解析-(54) 2D后端优化→PoseGraphInterface、PoseGraph、PoseGraph2D::AddNode()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…

小鹏汽车2019春招自动驾驶中心研发笔试题(部分题解)
小鹏汽车2019春招自动驾驶中心研发笔试题(部分题解)
链接:https://www.nowcoder.com/questionTerminal/ebd81731da404c0f9505c8a933c3ae64?orderByHotValue1&mutiTagIds1645&page1&onlyReferencefalse 来源:牛客网 …
Jeston与Px4(三)
Gazebo和mavros 文章目录Gazebo和mavros前言一、什么是 MAVROS?二、仿真工具Gazebo1、创建工作空间并初始化2、添加依赖,添加密钥3、安装gazebo9.14、ros与gazebo插件安装MAVROS1、添加依赖、初始化工作空间2、安装mavlink3、安装mavros4、创建部门5、安…

(02)Cartographer源码无死角解析-(47) 2D栅格地图→总体流程梳理与总结,及核心关键CastRays()讲解
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…

(02)Cartographer源码无死角解析-(44) 2D栅格地图→ProbabilityGrid 与 ProbabilityToLogOddsInteger()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
(02)Cartographer源码无死角解析-(42) 2D栅格地图→Submap、Submap2D、MapLimits
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
(02)Cartographer源码无死角解析-(39) PoseExtrapolator→ExtrapolatePose()、ExtrapolatePosesWithGravity() 等成员函数
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
(02)Cartographer源码无死角解析-(38) PoseExtrapolator→AdvanceImuTracker()、ImuTracker姿态推断
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末正下方中心提供了本…
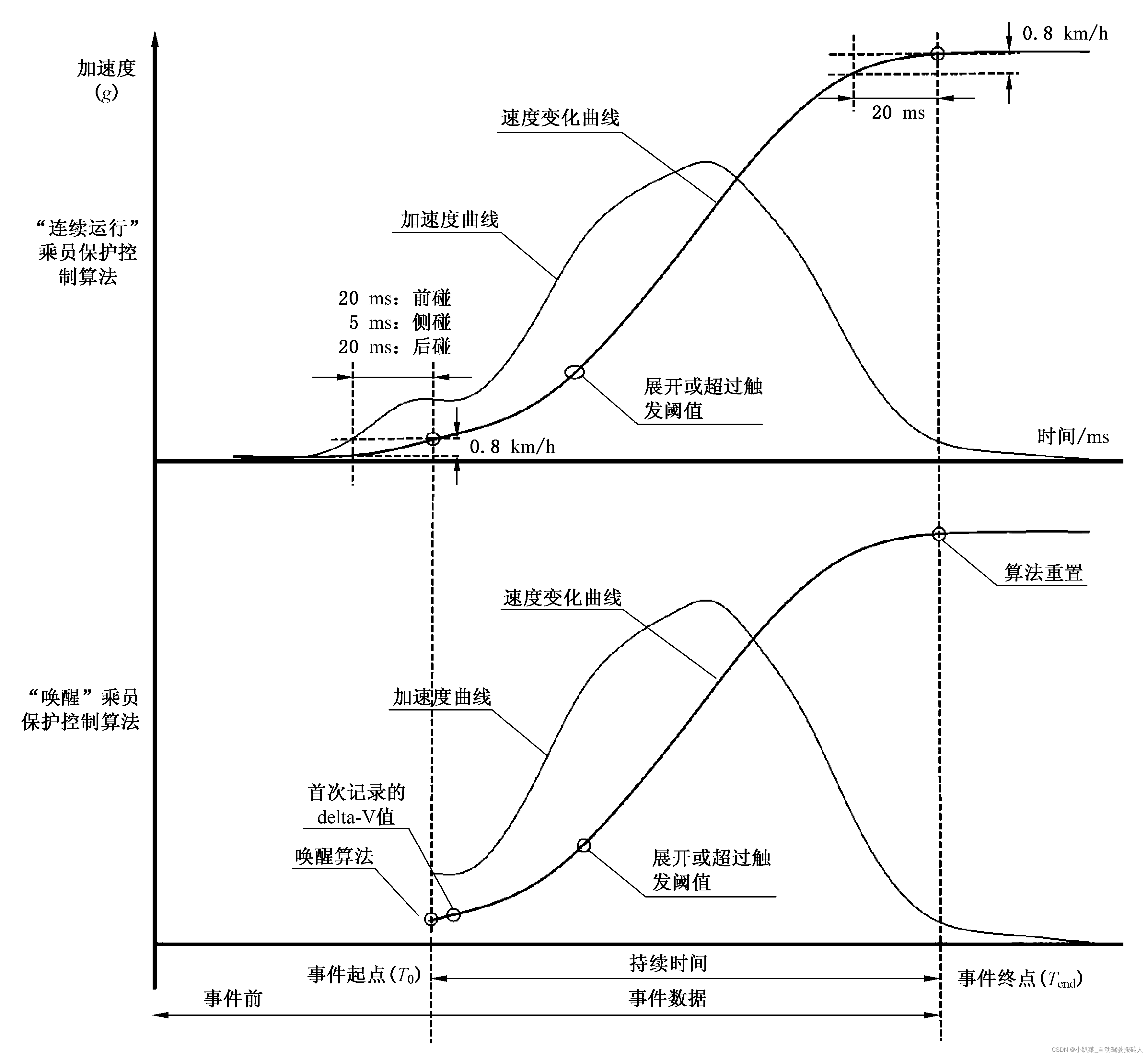
自动驾驶TPM技术杂谈 ———— 汽车事件数据记录系统
文章目录 介绍术语定义技术要求碰撞事件要求触发阈值锁定条件碰撞事件起点碰撞事件终点碰撞事件持续时间 数据记录要求记录功能要求存储介质EDR触发要求存储事件次数要求存储覆盖机制要求断电存储要求 数据提取要求总体要求端口要求数据提取协议要求11位CAN标识符读取数据功能寻…
(02)Cartographer源码无死角解析-(37) PoseExtrapolator→AddPose()、旋转向量(求导)变换成角速度
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文 末 正 下 方 中 心 提…
树莓派C++开发机器人智能小车(9)小车各种运动编程
后退
让机器人后退,仅需交换HIGH和LOW信号,反之亦然:
digitalWrite(0,LOW); //PIN O & 2 will move the Left Motor
digitalWrite(2,HIGH);
digitalWrite(3,LOW); //PIN 3 & 4 will move the Right Motor
digitalWrite(4,HIGH);
delay(3000);
前两行代码让左…


将KITTI数据集转化为ROS bag包——kitti2bag使用教程
将KITTI数据集转化为ROS bag包——kitti2bag使用教程
kitti2bag是把kitti的数据转换成rosbag的工具。本文主要记录下如何使用该工具,省的以后会忘掉。
1.安装kitti2bag
pip install kitti2bag注意这一步安装如果报错,建议首先尝试关闭代理,…

第十六届全国大学生智能车竞赛全向行进组整体设计
第十六届全国大学生智能汽车竞赛
RT-Thread创新论文
RT-Thread在全向运动控制中的运用
队伍名称:驭速者 目录第十六届全国大学生智能汽车竞赛RT-Thread创新论文RT-Thread在全向运动控制中的运用队伍名称:驭速者第一章引言1.1智能汽车制作情况1.2RT-Th…

MDC300平台介绍
目录什么是MDC?MDC300F提供的组网方案软件平台概述MDC提供的工具链MDC的结构图什么是MDC?
MDC(Mobile Data Center)硬件设计目标为高度智能驾驶硬件平台,承载如TJP(Traffic Jam Pilot)、HWP&am…
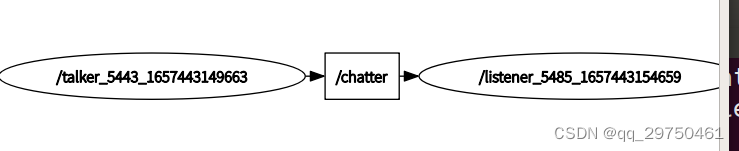
【ROS】手写消息发布器和订阅器(Python版)
这里记录使用Python语言编写简单的ROS消息发布器和订阅器,C版本可以参考 点击进入 使用环境:Python2.7.17 作系统:ubuntu18.04 IDE : VSCode 开发前准备
新建Python开发目录,如何建立ROS开发工作空间和功能包…
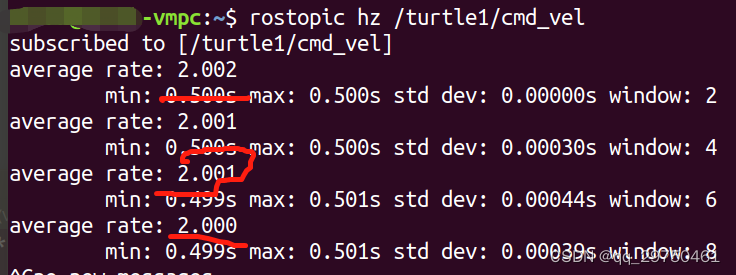
【ROS】话题基础使用
关于ROS中的话题 话题采用异步通信的机制,是节点间用来传输信息的重要总线,使用发布/订阅模型,数据由发布者传输给订阅者,同一话题的订阅者或发布者可以不唯一,即在话题通信过程中为节点间多对多的关系。 消息是话题中…

【深度强化学习】7. 稀疏奖励和模仿学习
【DataWhale打卡】李宏毅老师视频中的最后两部分,sparse reward和imitation learning。 文章目录1. Sparse Reward1.1 Reward Shaping1.2 Curriculum Learning1.3 Hierarchical RL2. Imitation Learning2.1 Behavior Cloning2.2 Inverse Reinforcement Learning3. 参…

LCDNet: Deep Loop Closure Detection and Point Cloud Registration for LiDAR SLAM
动机
为解决SLAM里面回环检测问题,基于LIDAR为主sensor的网络:抛弃了传统的词袋模型,直接通过NN提取描述子,同时以OT理论为基础做数据相似性判断;另外,通过NN估计两帧间的R/t变换阵
总体网络架构
LCDNet…

自动驾驶技术的一些关键点
地图
众包专业Lidarcamera 点云结合定位
GPS北斗WIFI 基站...Feature定位感知
雷达 Lidar(激光)毫米波超声波视觉 detectiontrackingclassificationsegmentation预测
model basedmodel free
车道序列选择规划
路径规划 A*轨迹规划:离散踩点,成本最优…
roslaunch的.launch文件的标签总结
.launch文件的标签总结1. launch 标签1.2 可包含的元素2. node标签2.1 属性2.1.1 必选2.1.2 可选项2.2 例子2.3 元素3. machine标签3.1 属性3.1.1 必选3.1.2 可选4.include标签4.1 属性4.1.1 必选4.2 可选4.2 元素5. remap标签6. env标签6.1 属性7.param标签7.1 属性7.1.1 必选…

激光雷达点云的向图像的投影
激光雷达点云的向图像的重投影
相机和雷达的联合标定是使用MATLAB2020b实现的
#include <opencv2/opencv.hpp>
#include <opencv2/calib3d/calib3d.hpp>#include <pcl/point_types.h>
#include <pcl/point_cloud.h>
#include <pcl/io/pcd_io.h>…
Python机器学习之游戏自动驾驶(一)
先说一下总体思路,这一块需要读者有一定的机器学习基础。我们在玩游戏的时候,是眼睛看到了屏幕的画面之后,大脑思考应该怎么操作,然后发送指令到我们的手指,按下指定的按键。
利用机器学习玩游戏也是同样的道理&#…
微报告下载!市场不确定性周期下的激光雷达前装赛道
随着理想L9 Pro版本(取消激光雷达)的上市(相比AD Max版本降价3万元),中国乘用车市场仅剩下蔚来(NT2.0平台)、阿维塔11仍全系标配激光雷达。
这对于激光雷达赛道来说,是一个明确的信…
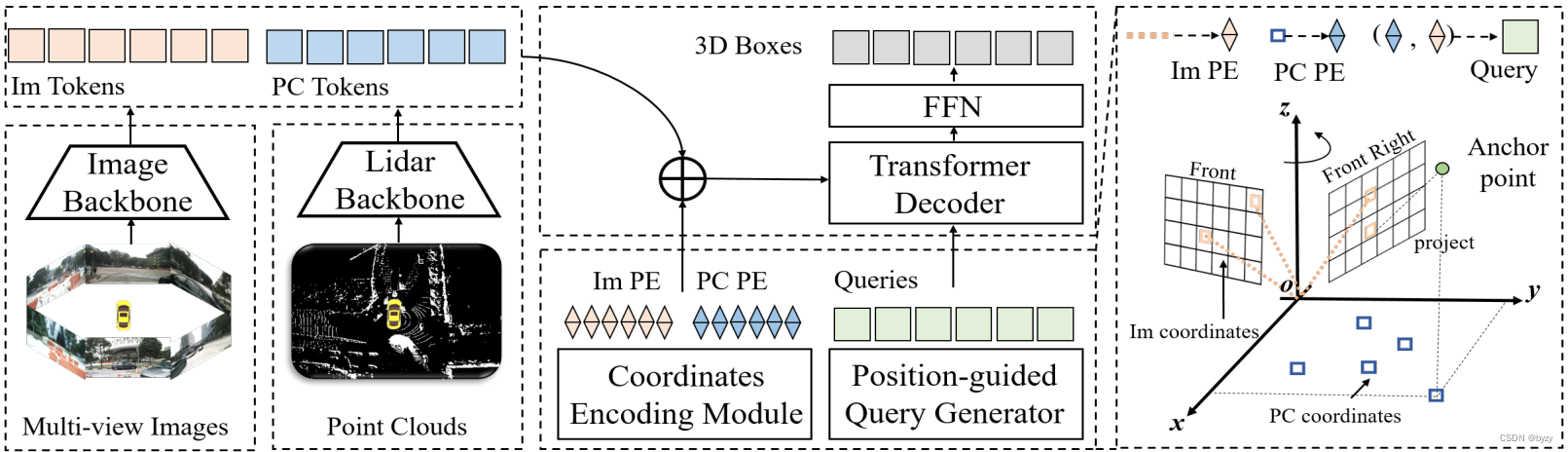
【论文笔记】Cross Modal Transformer: Towards Fast and Robust 3D Object Detection
原文链接:https://arxiv.org/abs/2301.01283
1. 引言 受到DETR启发,本文提出鲁棒的端到端多模态3D目标检测方法CMT(跨模态Transformer)。首先使用坐标编码模块(CEM),通过将3D点集隐式地编码为多…

HiEV独家|华为密洽重庆,推动车BU独立,涉及7000人研发团队
HiEV从多个接近华为的信息源获悉:华为有意推动车BU独立运营,目前正与重庆国资委密切接洽合作事宜。 多名人士评价,「形式类似荣耀单飞」。 当前,车BU仍归属于余承东统领的华为消费者BG(简称CBG,又称华为终端…

当“软件定义汽车”遇上“硬件拖软件的后腿”
交流群 | 进“传感器群/滑板底盘群/汽车基础软件群/域控制器群”请扫描文末二维码,添加九章小助手,务必备注交流群名称 真实姓名 公司 职位(不备注无法通过好友验证) 作者 | 兰斯琪 自特斯拉带火“软件定义汽车”的概念后&…
【论文笔记】MultiPath: Multiple Probabilistic Anchor TrajectoryHypotheses for Behavior Prediction
摘要:人类行为预测是运动规划中一个困难而又关键的任务。这在很大程度上具有挑战性,因为在自动驾驶等现实世界的领域中,可能的结果具有高度的不确定性和多模态集合。除了单一MAP轨迹预测[1,2],获得未来的准确概率分布是一个活跃的…
Python机器学习之游戏自动驾驶
这个项目去年就做了但是一直没时间写个博客(主要是懒。。),现在开始更新,最终实现效果我已经在B站传了视频,感兴趣的可以去看看,本来想做一个欧卡的自动驾驶,但是电脑配置不太行,就做…
刷题系列——2021年11月版
题单图论有向图的强连通分量1.ACwing367——tarjan2.ACwing1175——tarjan、DAGDP数据结构树套树1.ACwing2488—区间前缀、树套树(线段树set)图论
有向图的强连通分量
tarjan 应用:将有向图转化成有向无环图,针对新图每个点的入…

机器人状态估计疑难公式推导
机器人状态估计前置知识多元矩阵方差对角矩阵求逆第二章——概率论2.10公式的推导第三章——线性高斯估计似然估计参考博文前置知识
多元矩阵方差 对角矩阵求逆 第二章——概率论
2.10公式的推导
前置知识:在有多个随机变量的分布中,涉及到单个随机变…

SLAM十四讲学习历程
SLAM十四讲学习历程基本概念滤波器在 SLAM 中的应用图优化第四讲——李群、李代数李群环境配置Sophus 安装Pangolin 安装CLion 试验代码第六章——状态估计高斯分布一种概率密度函数高斯分布的性质参数的极大似然估计似然函数参考博文基本概念
滤波器在 SLAM 中的应用
贴出一…
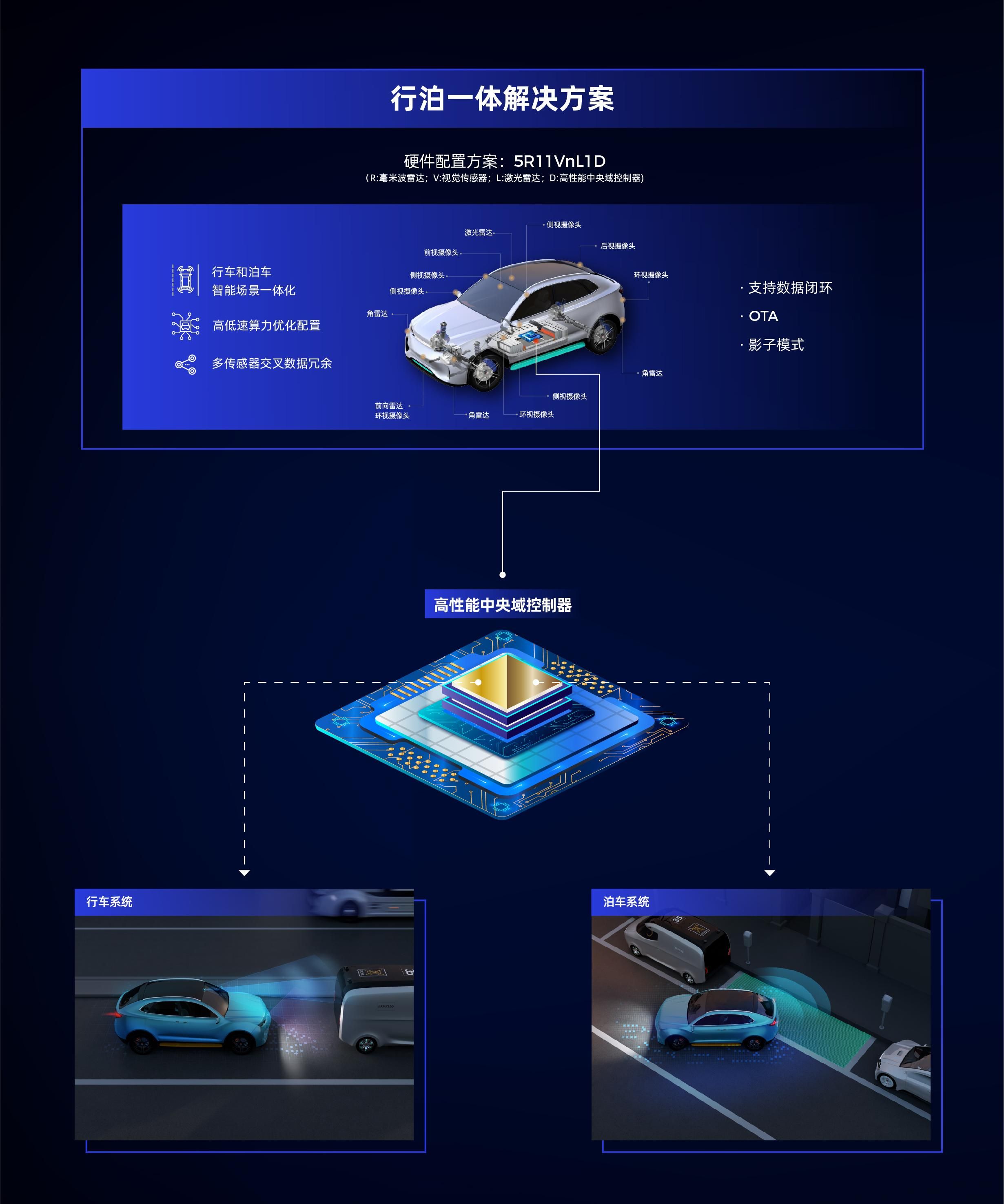
黑芝麻智能招股书:三年研发投入16亿,今年出货要破10万片
作者:张祥威编辑:德新 国产大算力芯片赛道的首家上市公司就要来了。 近日,Black Sesame International Holding Limited也就是黑芝麻智能,向港交所递交上市申请材料,计划在港股主板挂牌。 招股书披露,黑芝麻…
f1tenth仿真2
起点(0.192,0.201) 终点(9.902,5.148) 起点(9.902,5.148) 终点(-13.289,7.058) 起点(-13.289,7.058) 终点(-13.289,0.201) 起点(-13.289,0.201)
#! /usr/bin/env python
import time
from numba import jit
import math
import rospy
import numpy as…
德赛西威半年报:竞争加剧,座舱乏力?智驾继续保持高增速
作为国内头部的智能网联核心软硬件供应商,德赛西威的表现,也在一定程度上反映了市场的行情走向,也凸显不同细分赛道的竞争白热化。 半年报数据显示,2023年1-6月,德赛西威实现营业收入87.24亿元,同比增长36.…

第二章-自动驾驶卡车-自动驾驶卡车前装量产的要求
1、自动驾驶卡车的特点与挑战
重卡主要运行在相对封闭的高速公路,相较城市道路场景看似更简单。但是,由于重卡特有的物理特性、运行环境和商业运营要求,相较于乘用车的自动驾驶系统,重卡的自动驾驶系统对车辆的感知距离和精度、系…
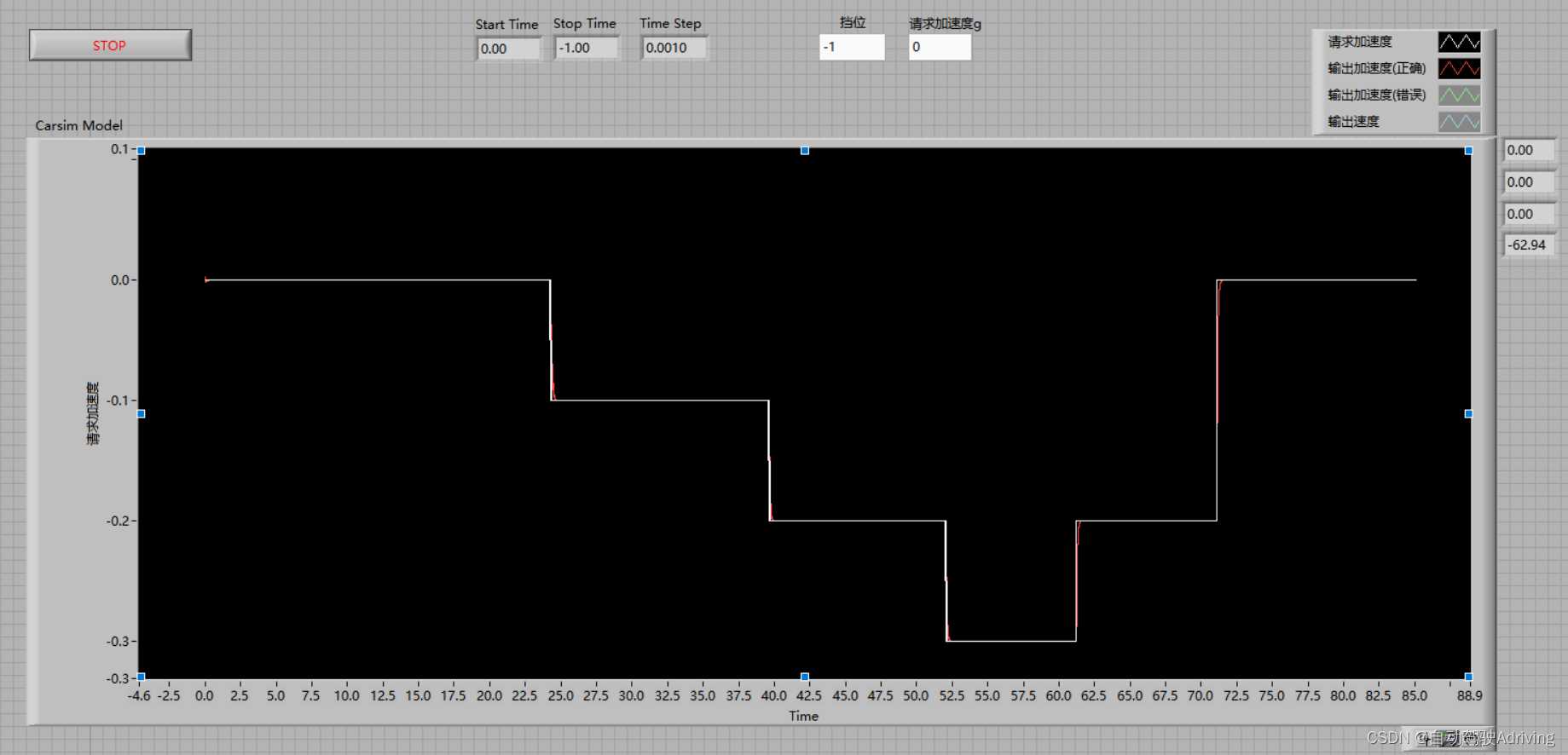
自动驾驶仿真:基于Carsim开发的加速度请求模型
文章目录 前言一、加速度输出变量问题澄清二、配置Carsim动力学模型三、配置Carsim驾驶员模型四、添加VS Command代码五、Run Control联合仿真六、加速度模型效果验证 前言
1、自动驾驶行业中,算法端对于纵向控制的功能预留接口基本都是加速度,我们需要…
8.19 校招 内推 面经
绿泡泡: neituijunsir 交流裙,内推/实习/校招汇总表格 1、校招 | Momenta 2024校园招聘正式启动 (内推)
校招 | Momenta 2024校园招聘正式启动 (内推) 2、校招 | TP-Link 联洲国际2024秋季校园招聘正式启动 (内推)
校招 | TP-Link 联洲国际2024秋季…

使用在 Web 浏览器中运行的 VSCode 实现 ROS2 测程法
一、说明 Hadabot是软件工程师学习ROS2和机器人技术的机器人套件。我们距离Hadabot套件的测试版还有一周左右的时间。我们将在本文末尾披露有关如何注册的更多信息。 新的Hadabot套件完全支持ROS2。除了硬件套件外,Hadabot软件环境将主要基于Web浏览器,以…
FastDDS 源码剖析:FastDDS 概述
目录
FastDDS 介绍
什么是 FastDDS:
为什么使用 FastDDS:
如何使用 FastDDS:
FastDDS 的缺点 FastDDS 介绍
FastDDS 是一个高性能、可扩展的开源实时传输层协议(RTPS)实现,由 eProsima 公司开发。它遵…

Bounding Box与anchor box
之前一直分不清Bounding Box与anchor box,直到问了一下 YOLO会将输入的图片分成S*S个网格,每个小网格会生成n个anchor Box。图像的真实框会和图像中心点所在的小网格生成的anchor box做IOU计算。回归出来的框就是Bounding Box(也就是网络输出…
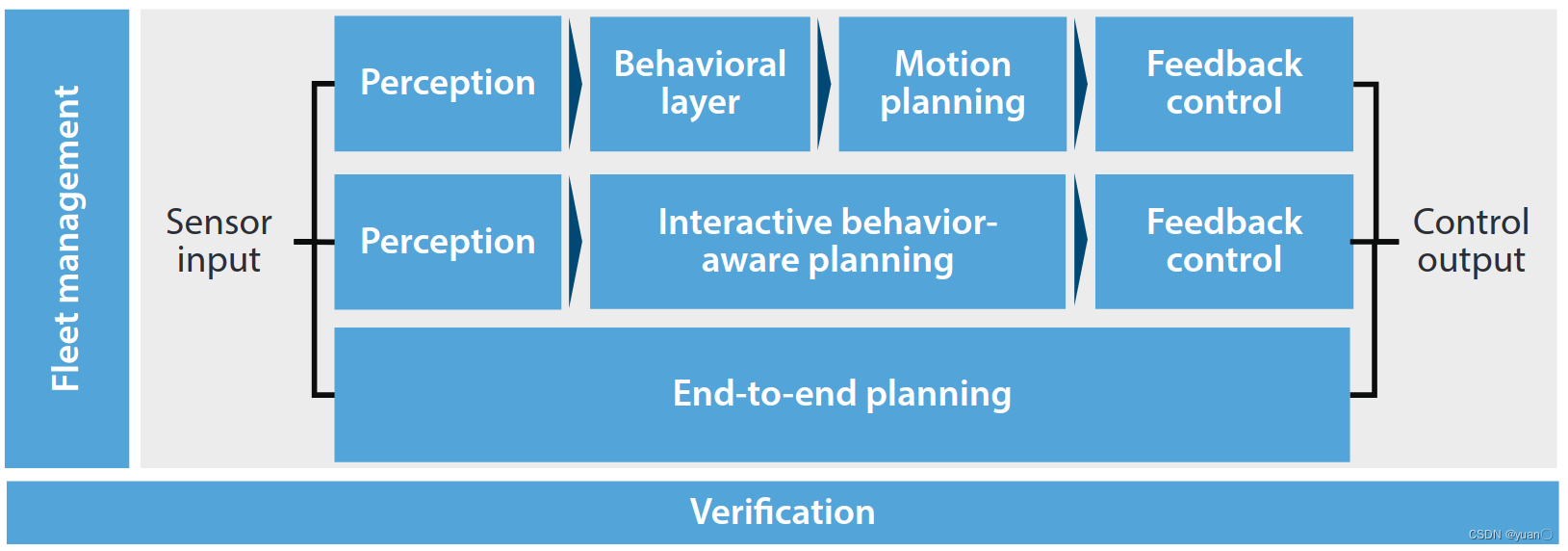
【论文笔记】Planning and Decision-Making for Autonomous Vehicles
文章目录 Summary1. INTRODUCTION2. MOTION PLANNING AND CONTROL2.1. Vehicle Dynamics and Control2.2. Parallel Autonomy2.3. Motion Planning for Autonomous Vehicles 3. INTEGRATED PERCEPTION AND PLANNING3.1. From Classical Perception to Current Challenges in Ne…
(02)Cartographer源码无死角解析-(72) 2D后端优化→OptimizationProblem2D-约束残差、landmark残差
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末正下方中心提供了本…
百度Apollo学习心得:探索自动驾驶技术的前沿之旅
文章目录 前言一、理论学习与实践结合二、多方资源的整合利用三、团队合作与交流分享四、持续学习与创新思维总结 前言
百度Apollo是一项引领自动驾驶技术发展的开放平台,通过深度学习、感知与决策、定位与控制等关键技术,为开发者提供了丰富的工具和资…
8月26日,每日信息差
1、上海发布两项支持高级别自动驾驶的5G网络标准,在上海市通管局的指导下,由上海移动和中国信息通信研究院牵头组织二十余家标准起草单位共同参与编写的《支持高级别自动驾驶的5G网络规划建设和验收要求》和《支持高级别自动驾驶的5G网络性能要求》等两项…

路径规划 | 图解Theta*算法(附ROS C++/Python/Matlab仿真)
目录 0 专栏介绍1 A*算法的局限性2 Theta*算法原理图解3 Bresenham视线法4 算法仿真测试4.1 算法流程图4.2 ROS C 实现4.3 Python实现4.4 Matlab实现 0 专栏介绍
🔥附C/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细介绍全…

轻量、便捷、高效—经纬恒润AETP助力车载以太网测试
随着自动驾驶技术和智能座舱的不断发展,高宽带、高速率的数据通信对主干网提出了稳定、高效的传输要求,CAN(FD)、LIN已无法充分满足汽车的通信需求。车载以太网作为一种快速且扩展性好的网络技术,已经逐步成为了汽车主干网的首选。 此外&…
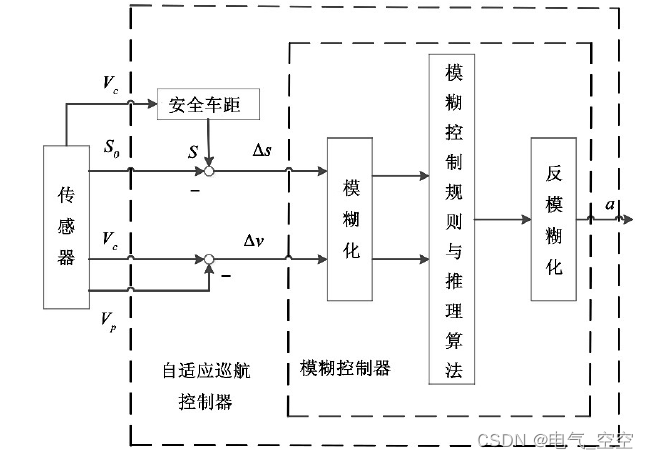
汽车自适应巡航系统车距控制策略研究
1 引言 自适应巡航控制( Adaptive Cruise Control,ACC) 是汽车驾驶辅助系统的重要组成部分,其作用是根据车距传感器探测到本车( ACC 车辆) 与主目标车辆( 前车) 之间的相对位置和相对速度信息,自动调节ACC 车辆的节气门开度或部分制动力矩( 即…
面向高速公路车辆切入场景的自动驾驶测试用例生成方法
1 前言 自动驾驶汽车为解决“交通事故、交通拥堵、环境污染、能源短缺”等问题提供了新的途径[1]。科学完善的测试验证评价体系对提高自动驾驶汽车的研发效率、健全相关法律法规、推进智能交通发展至关重要[2]。自2009年起,谷歌自动驾驶汽车已经进行了超过560万km公…

自动驾驶的纯视觉路线是否靠谱?
(一)文章素材参考
数据参考|汽车ECU开发 微信公众号 (二)正文
1、自动驾驶分级
目前公认的自动驾驶分级标准由SAE(SAE International,Society of Automotive Engineers国际自动机工程师学会&…
上海嘉定上线自动驾驶网约车,《央视新闻》朱广权官方种草
内容提要:昨日上午,滴滴的自动驾驶汽车,面向上海公众开放试乘服务。用户可在「滴滴出行」App 上报名体验,真切地感受无人驾驶的快感。 原创:HyperAI超神经 关键词:滴滴 自动驾驶 路测城市 6 月 27 日&…


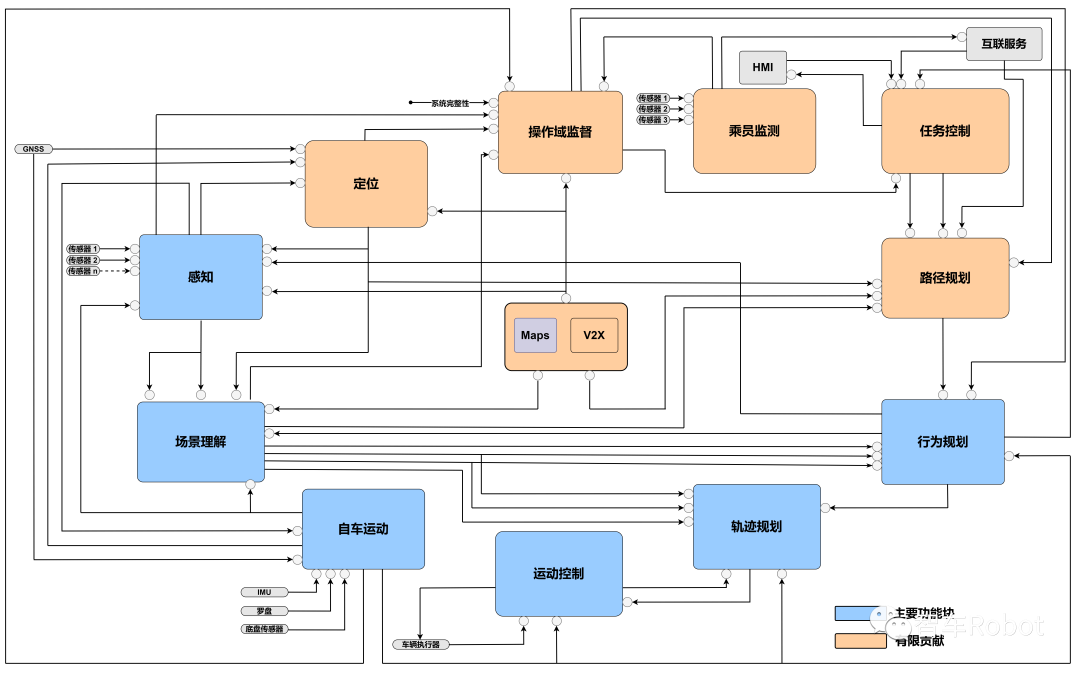
自动驾驶和辅助驾驶系统的概念性架构(一)
摘要:
本文主要介绍包括功能模块图,涵盖了底层计算单元、示例工作负载和行业标准。 前言 本文档参考自动驾驶计算联盟(Autonomous Vehicle Computing Consortium)关于自动驾驶和辅助驾驶计算系统的概念系统架构。 该架构旨在与SAE L1-L5级别的自动驾驶保…

芯探科技--泛自动驾驶激光雷达解决方案
泛自动驾驶应用领域: 无人配送车 无人叉车 服务机器人 无人清扫车 …… 泛自动驾驶激光雷达解决方案介绍 在中低速移动过程中,类似无人配送车、无人叉车、服务型机器人、无人清扫车等具有自动驾驶功能的车辆,其需要对周围的环境进行探测,进而实现…

自动驾驶——【规划】记忆泊车特殊学习路径拟合
1.Back ground 如上图,SLAM学习路线Start到End路径,其中曲线SDAB为D档位学习路径,曲线BC为R学习路径,曲线AE为前进档D档学习路径。 为了使其使用记忆泊车时,其驾驶员体验感好,需去除R档倒车部分轨迹&#x…
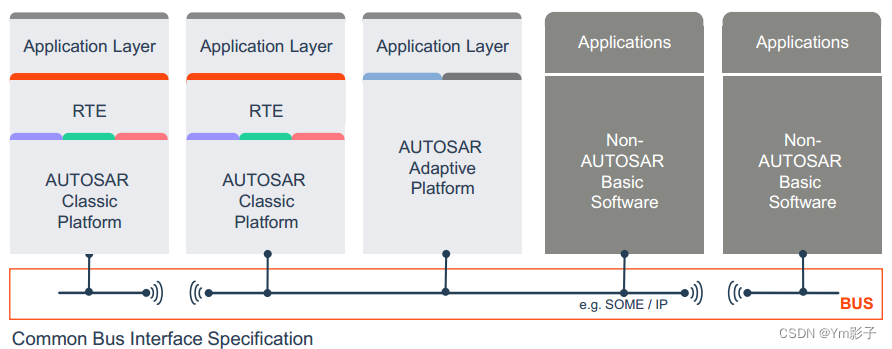
AutoSAR CP 飞阅TIME
目录
什么是autosar
autosar 做了什么
Foundation、CP、AP
CLASSIC PLATFORM (CP)
ADAPTIVE PLATFORM
基于autosar 开发
SWC
Port
Runnables
RTE
BSW
MCAL
CDD
I/O Hardware Abstraction
Communication Hardware Abstraction
Memory Har…

又一关键系统上线,理想车云和自动驾驶系统登陆OceanBase
8 月 1 日,理想汽车公布 7 月交付数据,理想汽车 2023 年 7 月共交付新车 34,134 辆,同比增长 227.5%,并已连续两个月交付量突破三万。至此,理想汽车 2023 年累计交付量已经达到 173,251 辆,远超 2022 年全年…

Autoware.universe部署05:实车调试
文章目录 一、建图1.1 点云地图1.2 高精地图 二、参数配置三、传感器数据通信接口3.1 雷达点云3.2 图像3.3 IMU3.4 GNSS RTK 四、实车调试4.1 编写启动4.2 修改传感器外参4.3 修改车身参数4.4 实车调试 本文介绍了 Autoware.universe 在实车上的部署,本系列其他文章…
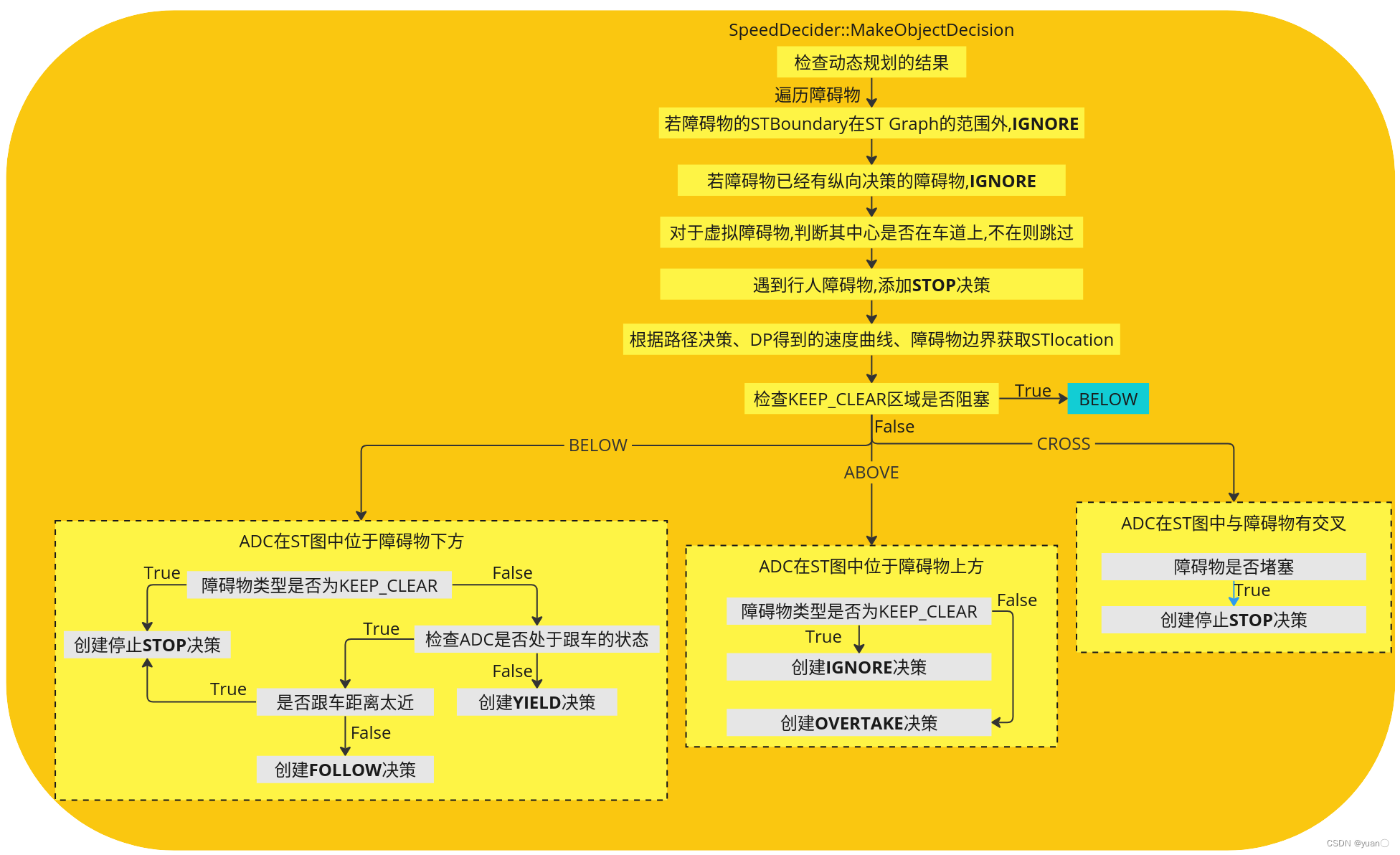
【Apollo学习笔记】——规划模块TASK之SPEED_DECIDER
文章目录 前言SPEED_DECIDER功能简介SPEED_DECIDER相关配置SPEED_DECIDER流程MakeObjectDecisionGetSTLocationCheck类函数CheckKeepClearCrossableCheckStopForPedestrianCheckIsFollowCheckKeepClearBlocked Create类函数 前言
在Apollo星火计划学习笔记——Apollo路径规划算…

路径规划 | 图解Lazy Theta*算法(附ROS C++/Python/Matlab仿真)
目录 0 专栏介绍1 Theta*算法局限性2 Lazy Theta*算法原理3 Theta* VS. Lazy Theta*4 仿真实现4.1 ROS C实现4.2 Python实现4.3 Matlab实现 0 专栏介绍
🔥附C/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图…
BEV感知实时构建路口拓扑 觉非科技基于MapTR的优化与实践
近期,觉非科技通过在车端与路端的大规模数据积累,基于MapTR(Map TRansformer)方法提出了创新与优化:①对车道信息的表达方式进行优化,并简化了模型结构;②在MapTR的基础上加入了地图先验信息&am…

我国农机自动驾驶系统需求日益增长,北斗系统赋能精准农业
中国现代农业的发展,离不开智能化、自动化设备,迫切需要自动驾驶系统与农用机械的密切结合。自动驾驶农机不仅能够缓解劳动力短缺问题,提升劳作生产效率,同时还能对农业进行智慧化升级,成为解决当下农业痛点的有效手段…
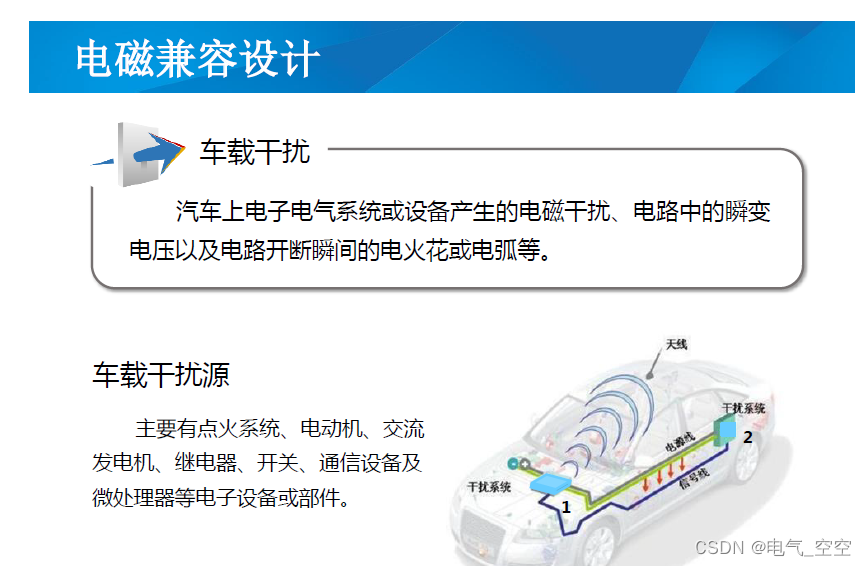
ADAS系统开发及测试平台解决方案
1 趋势与挑战 高级驾驶员辅助系统(ADAS) 作为实现车辆主动安全的关键系统,已经越来越多的配置到各种级别的乘用车和商用车上。同时面对日益加强的法律法规,基于FAS-CAM( 前视主动安全摄像头) 的ADAS 解决方案将逐渐成为Euro-NCAP五星安全等级车辆的必须配…

经纬恒润重磅推出第七代前视单目摄像头控制器
随着L2自动驾驶功能的普及,整车架构的升级,以及越来越高的法规要求,ADAS产品的开发迎来了更高的挑战:一方面,需要提高ADAS产品的整车性能,以应对更多的使用场景;另一方面,需要考虑AD…

三秋农忙,自动驾驶农机保驾护航
“三秋”(收获、播种、整地)是一年中重要而忙碌的农事季节,水稻、棉花、玉米等农作物收获时期,也是小麦、蔬菜等秋种的好时间,还是各类农作物进入秋管的重要期。
随者农业科技发展,北斗导航农机自动驾驶系…
8.17校招 内推 面经
绿泡泡: neituijunsir 交流裙,内推/实习/校招汇总表格 1、校招 | 腾讯2024校园招聘全面启动(内推)
校招 | 腾讯2024校园招聘全面启动(内推) 2、校招 | 大华股份2024届全球校园招聘正式启动(内推)
校招 | 大华股份2024届全球校园招聘正式启动(内推) …
8.18 校招 内推 面经
绿泡泡: neituijunsir 交流裙,内推/实习/校招汇总表格 1、校招 | 小米集团2024届全球校园招聘正式启动(内推)
校招 | 小米集团2024届全球校园招聘正式启动(内推) 2、2023校招总结--软件测试岗位 - 2
2…
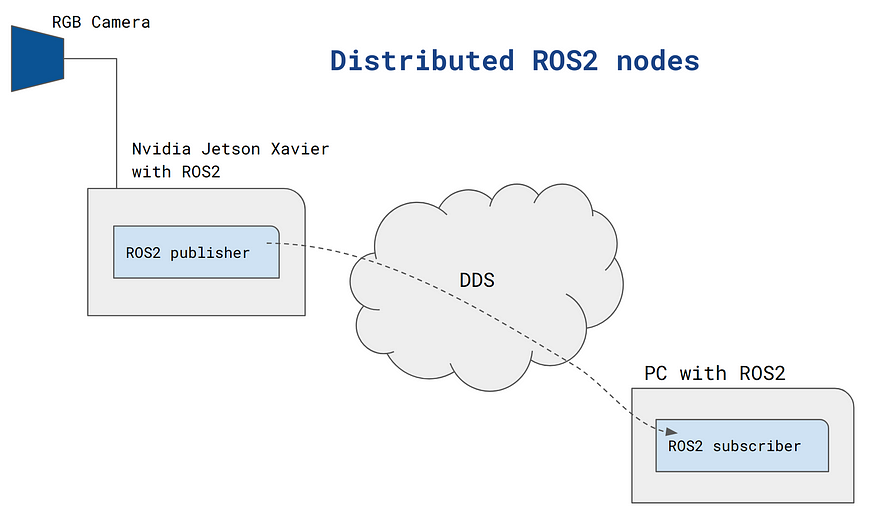
ROS2 中的分布式系统
一、说明 当您运行 ROS2 应用程序时,通常需要在不同机器的不同位置运行 ROS2 节点。由于 ROS2 在抽象的 DDS 层中使用节点之间的通信,因此我们可以非常轻松地安排通信。 为了充分理解 ROS2 的架构,我建议您熟悉本文。 出于本文的目的…
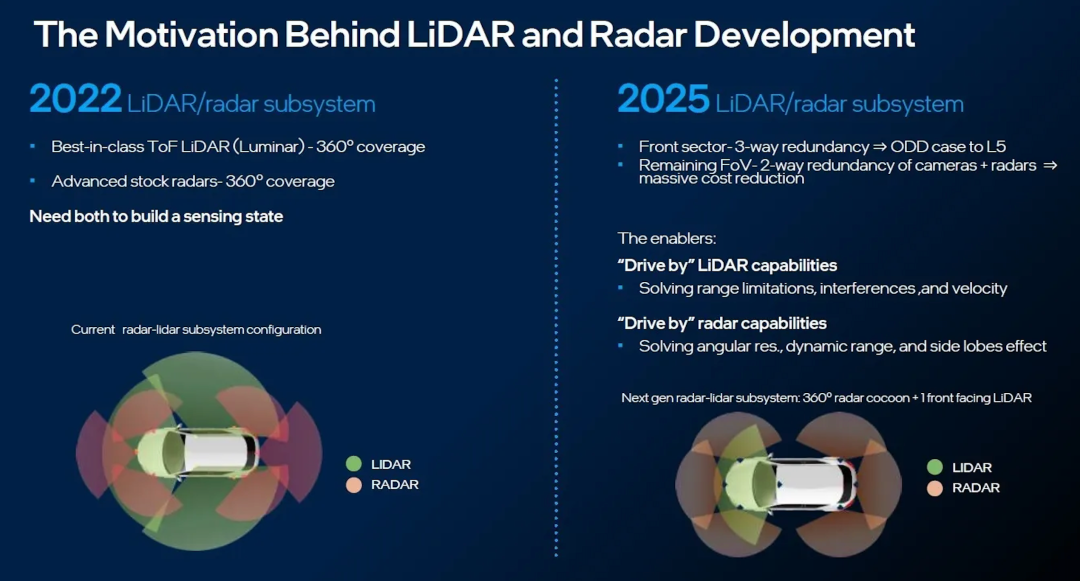
「对冲」布局?激光雷达行业大佬「个人投资」4D毫米波雷达
随着高阶智驾从高端车型逐步下沉中低价位市场,核心传感器,尤其是激光雷达和4D成像毫米波雷达的目标市场也在寻求分层和融合。 “激光雷达是在自动驾驶出现后才崭露头角。在这些系统开发的早期阶段,很多公司不惜一切代价使传感器尽可能强大。但…
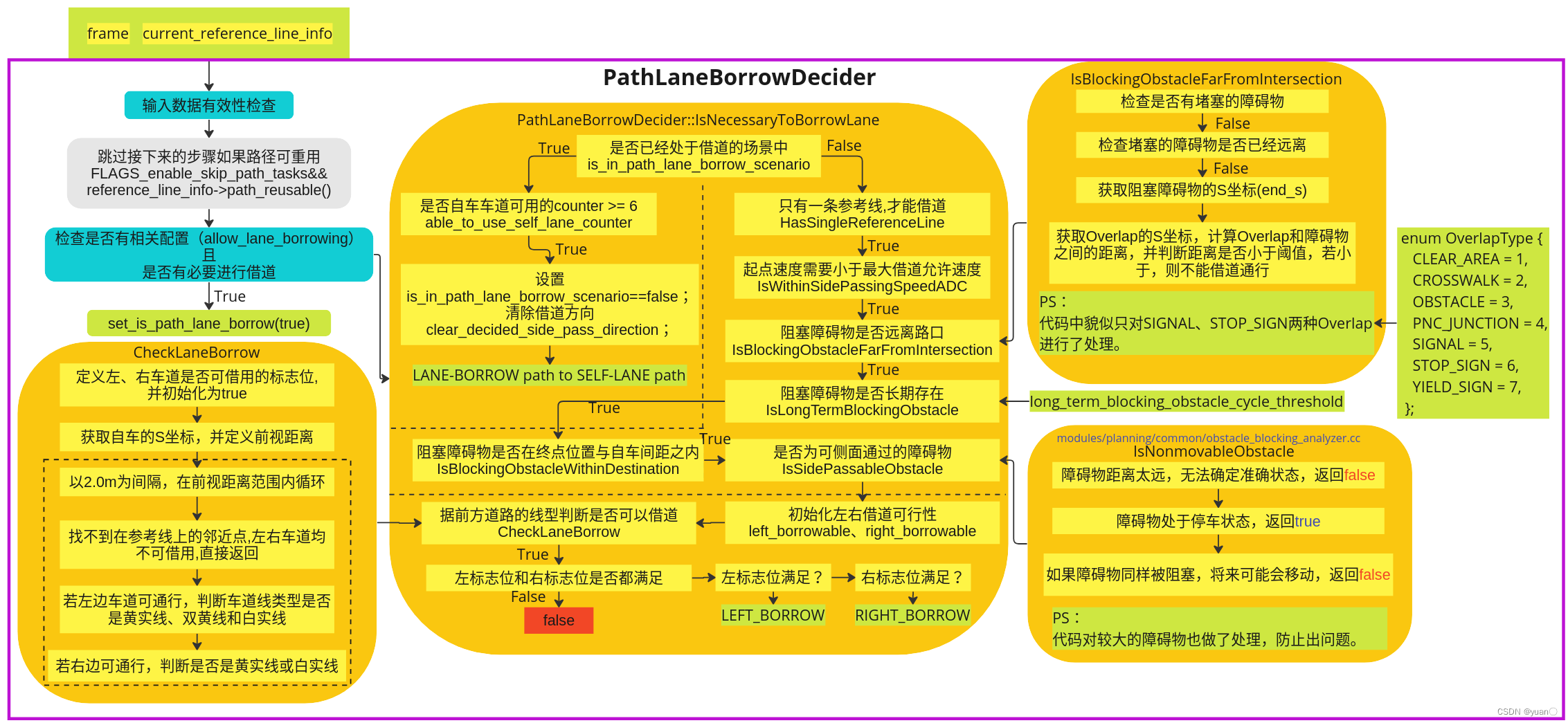
【Apollo学习笔记】——规划模块TASK之PATH_BORROW_DECIDER
文章目录 前言PATH_BORROW_DECIDER功能简介PATH_BORROW_DECIDER相关配置PATH_BORROW_DECIDER总体流程PATH_BORROW_DECIDER相关子函数IsNecessaryToBorrowLaneIsBlockingObstacleFarFromIntersectionIsNonmovableObstacleCheckLaneBorrow 参考 前言
在Apollo星火计划学习笔记—…

AI在日常生活中的应用:从语音助手到自动驾驶
文章目录 AI的定义和发展AI在日常生活中的应用1. **智能语音助手**2. **智能家居**3. **智能医疗**4. **自动驾驶** 代码示例:使用Python实现基于机器学习的图片分类AI的未来前景结论 🎉欢迎来到AIGC人工智能专栏~探索AI在日常生活中的应用 ☆* o(≧▽≦…

【Apollo学习笔记】——规划模块TASK之PIECEWISE_JERK_NONLINEAR_SPEED_OPTIMIZER(二)
文章目录 TASK系列解析文章OptimizeByNLP1.get_nlp_info()定义问题规模2.get_bounds_info()定义约束边界约束3.get_starting_point()定义初值4.eval_f()求解目标函数5.eval_grad_f()求解梯度6.eval_g()求解约束函数7.eval_jac_g()求解约束雅可比矩阵8.eval_h()求解黑塞矩阵9. f…
Ros noetic 机器人坐标记录运动路径和发布 实战教程(B)
前言: 网上记录Path的写入文件看了一下还挺多的,有用yaml作为载体文件,也有用csv文件的路径信息,也有用txt来记录当前生成的路径信息,载体不重要,反正都是记录的方式,本文主要按yaml的方式写入,本文将撰写csv方式的文件写入格式,完成上一篇文章中的留下的存入…
索尼 toio™ 应用创意开发征文|toio™——激发儿童创造力的创意玩具
导语: toio™是一种激发儿童创造力的创意玩具,它以简洁的设计和多功能性能为特点,为孩子们提供了一个探索和发展创意的平台。本文将探讨toio™玩具的创意方向,以及它如何帮助儿童开发创造力和想象力。 toio™——激发儿童创造力的…
Traffic Light in CARLA
1. Concepts
111
2. Case Study
222
References
[1] 【Carla】python API函数学习_洛基King的博客-CSDN博客

BEVFormer论文解析
背景
跟基于雷达的相比,纯视觉的方案成本低,而且具有RGB和纹理信息,可以用于检测像交通信号灯、车道线等道路要素。
自动驾驶的感知本意是要从多个摄像头给出的2D信息来预测3D bbox(检测)或者semantic map(分割),最直接的方案是…


功能定义-紧急制动系统
功能简介 紧急制动系统的触发过程如上图所示: 安全距离报警:当两车距离较近时,会给予驾驶员相应提示 预报警:当两车存在碰撞风险但风险较低【Danger Level1】时,会给予驾驶员提示【提示相比之前更为明显】 制动预填充&…
自动驾驶:轨迹预测综述
自动驾驶:轨迹预测综述 轨迹预测的定义轨迹预测的分类基于物理的方法(Physics-based)基于机器学习的方法(Classic Machine Learning-based)基于深度学习的方法(Deep Learning-based)基于强化学习…
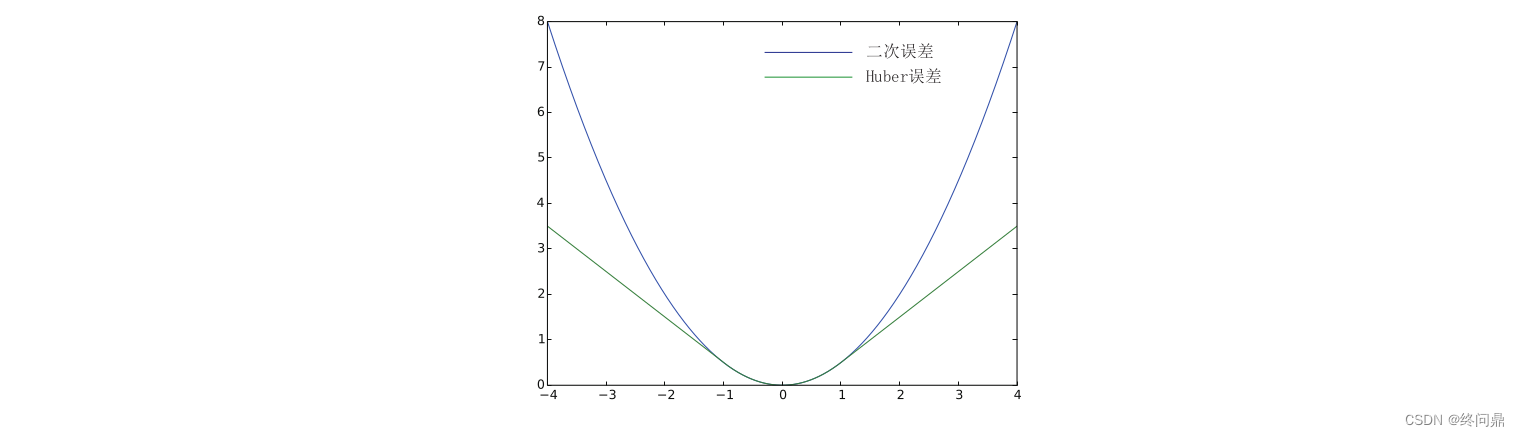
【视觉SLAM入门】7.3.基于KF/EKF和基于BA图优化的后端,推导及举例分析
"时间倾诉我的故事" 1. 理论推导2. 主流解法3. 用EKF估计状态3.1. 基于EKF代表解法的感悟 4. 用BA法估计状态4.1 构建最小二乘问题4.2 求解BA推导4.3 H的稀疏结构4.4 根据H稀疏性求解4.5 鲁棒核函数4.6 编程注意 5.总结 引入:
前端里程计能给出一个短时间…
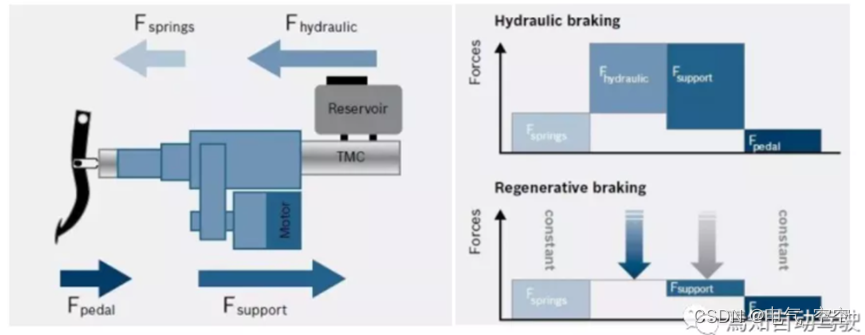
高速路自动驾驶功能HWP功能定义
一、功能定义
高速路自动驾驶功能HWP是指在一般畅通高速公路或城市快速路上驾驶员可以放开双手双脚,同时注意力可在较长时间内从驾驶环境中转移,做一些诸如看手机、接电话、看风景等活动,该系统最低工作速度为60kph。 如上两种不同环境和速度…

2024北京国际物联网展览会(物联网展)物物相连,万物互联
2024北京国际物联网展览会(物联网展)
2024 Beijing international IOT Expo
时间:2024年6月28-30日 地点:北京亦创国际会展中心 前言
随着信息技术的不断发展,物联网已成为当前全球信息社会发展的主要趋势之一。物联网技术正在逐渐渗透到人…

地图结构 | 图解占据栅格地图原理(附Matlab建图实验)
目录 0 专栏介绍1 栅格地图1.1 应用场景1.2 基本概念 2 占据栅格地图2.1 更新模型2.2 截断策略 3 仿真实现3.1 算法流程3.2 Matlab实现 0 专栏介绍
🔥附C/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索…
9.9校招 实习 内推 面经
绿泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格
1、自动驾驶一周资讯 -理想汽车计划进军自动驾驶卡车领域,宝马联合亚马逊开发下一代自动驾驶平台,丰田汽车重组自动驾驶和人工智能子公司
自动驾驶一周资讯 -理想汽车…

智能交通顶会 IEEE ITSC工作 LimSim:长期交互式多场景交通仿真器(已开源)
交通仿真器是自动驾驶技术发展的重要支撑。交通仿真器可以在虚拟环境中仿真各种交通场景和车辆行驶情况,从而提高测试效率、降低测试风险、提高测试准确性和加速开发周期,是自动驾驶技术验证和优化的重要手段之一。
**LimSim是由上海人工智能实验室智能…
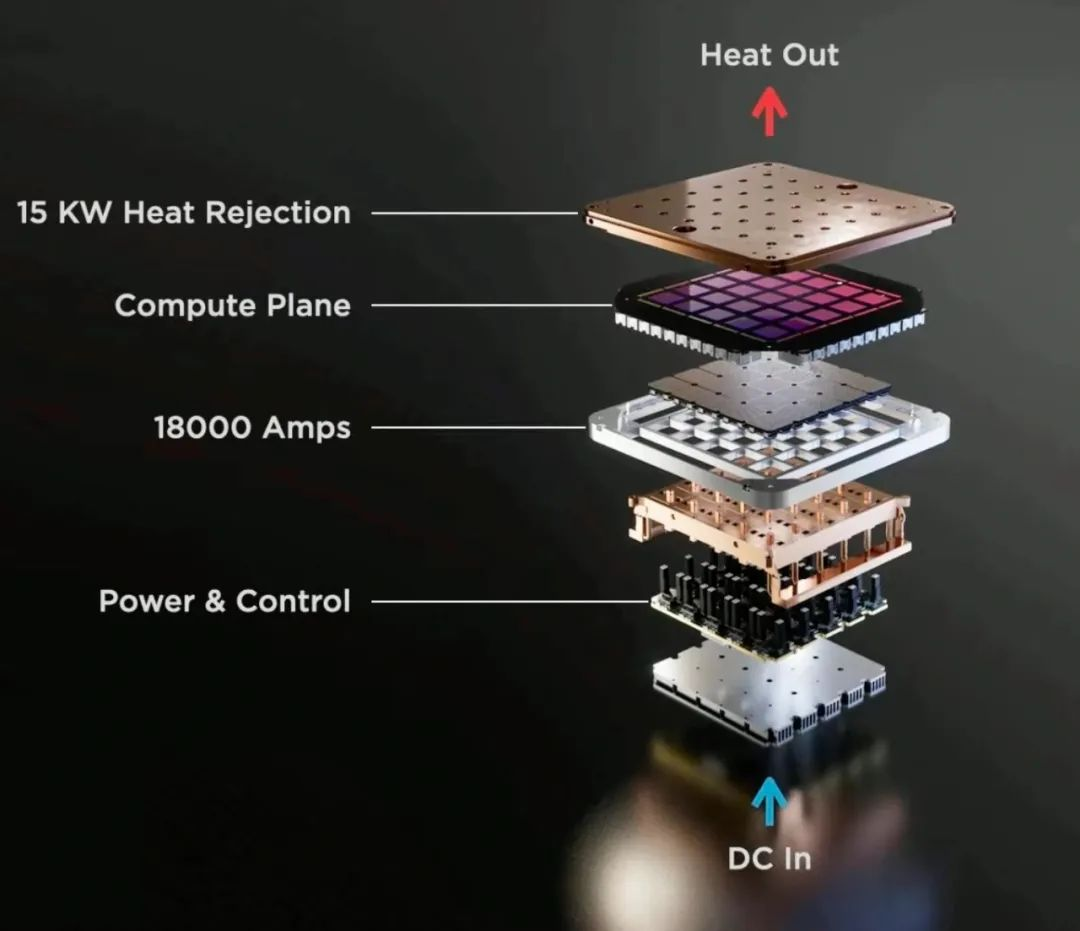
特斯拉Dojo超算:AI训练平台的自动驾驶与通用人工智能之关键
特斯拉公开Dojo超算架构细节,AI训练算力平台成为其自动驾驶与通用人工智能布局的关键一环
在近日举行的Hot Chips 34会议上,特斯拉披露了其自主研发的AI超算Dojo的详细信息。Dojo是一个可定制的超级计算机,从芯片到系统全部由特斯拉自主设计…
9.12 校招 实习 内推 面经
绿泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、校招 | 华为终端BG 2024届应届生全球招聘官宣
校招 | 华为终端BG 2024届应届生全球招聘官宣 2、2023校招总结--软件开发- 6
2023校招总结--软件开发- 6 3、校招 | 法雷奥2024秋季校园招聘…
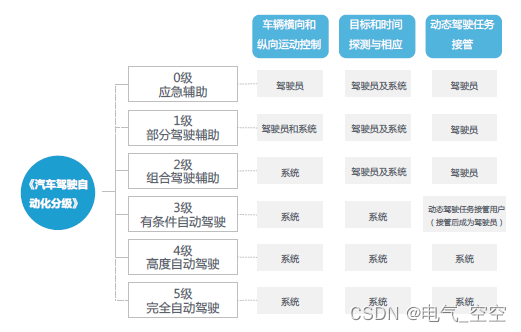
2020-2023中国高等级自动驾驶产业发展趋势研究-概念界定
1.1 概念界定 自动驾驶发展过程中,中国出现了诸多专注于研发L3级以上自动驾驶的公司,其在业界地位也越来越重要。本报告围绕“高等级自动驾驶” 展开,并聚焦于该技术2020-2023年在中国市场的变化趋势进行研究。 1.1.1 什么是自动驾驶 自动驾驶…

【Apollo学习笔记】——规划模块TASK之PATH_DECIDER
文章目录 前言PATH_DECIDER功能简介PATH_DECIDER相关配置PATH_DECIDER总体流程路径决策代码流程及框架MakeStaticObstacleDecision PATH_DECIDER相关子函数参考 前言
在Apollo星火计划学习笔记——Apollo路径规划算法原理与实践与【Apollo学习笔记】——Planning模块讲到……S…
【Apollo】建立对自主的信任:阿波罗的尖端技术
前言 Apollo (阿波罗)是一个开放的、完整的、安全的平台,将帮助汽车行业及自动驾驶领域的合作伙伴结合车辆和硬件系统,快速搭建一套属于自己的自动驾驶系统。 开放能力、共享资源、加速创新、持续共赢是 Apollo 开放平台的口号。百度把自己所拥有的强大、…
视觉SLAM14讲笔记-第4讲-李群与李代数
李代数的引出:
在优化问题中去解一个旋转矩阵,可能会有一些阻碍,因为它对加法导数不是很友好(旋转矩阵加上一个微小偏移量可能就不是一个旋转矩阵),因为旋转矩阵本身还有一些约束条件,那样再求…
高通8295中国首发!智舱再度上演「军备竞赛」,这次有何不同
对于智能座舱来说,上一轮市场红利已经接近尾声。
高工智能汽车研究院监测数据显示,2023年1-6月中国市场(不含进出口)乘用车前装标配中控娱乐系统交付856.13万辆,前装标配渗透率已经超过90%,达到92.13%。
…

博格华纳高压发卡式电机解析
博格华纳的高压发卡式电机具有功率强大、坚固耐用和高性能等特点,采用紧凑型设计,优化的导体绕组结构缩短了电机的尺寸,使其便于在更小的空间内进行安装,并提高了常用区间的工作效率。此外,电机在设计上减少了重稀土元…
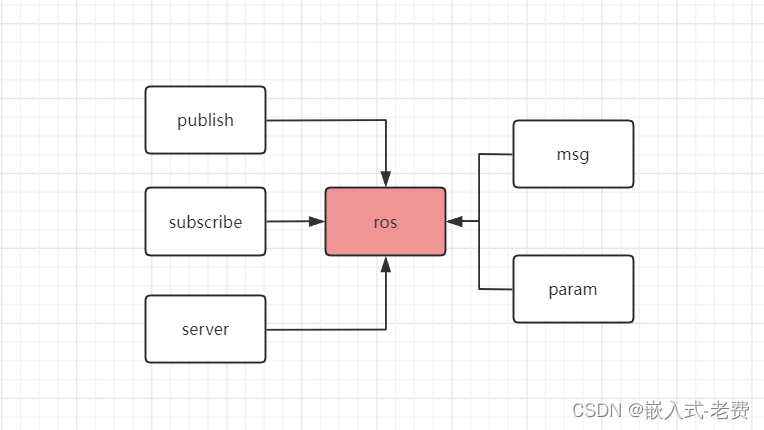
SLAM从入门到精通(ROS应用开发)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing 163.com】 前面我们陆陆续续学习了关于ros的一些知识点,比如如何创建包、如何进行消息访问、如何注册服务、如何访问参数等等。那么对于我们使用者…
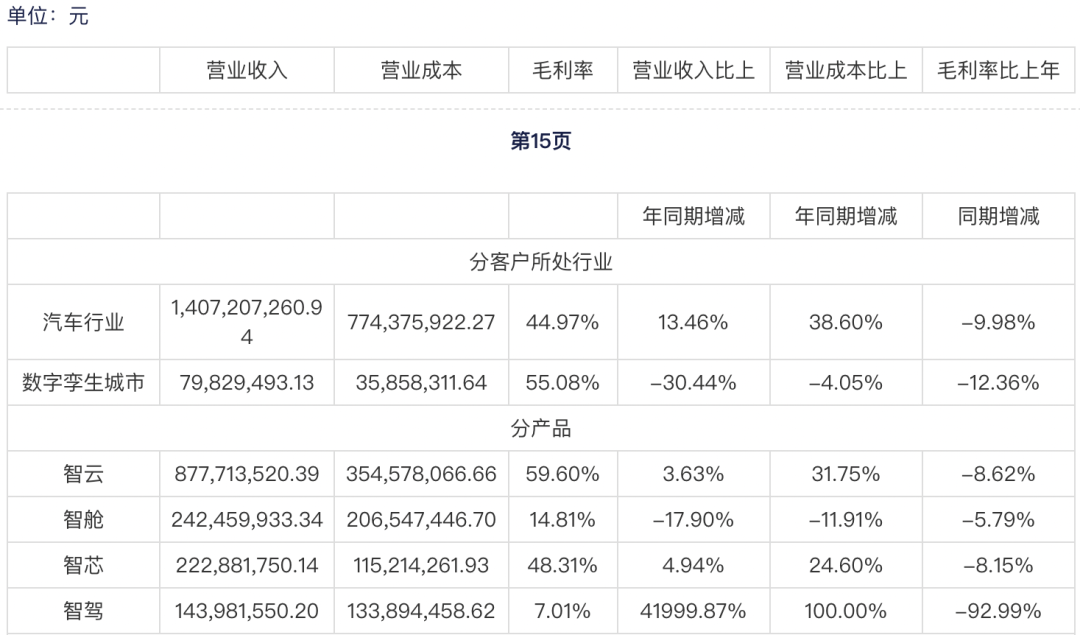
笑怼「无图论」,四维图新“急”了
随着中国乘用车市场进入高阶智驾规模化,以及从高速NOA到城区NOA的渗透的新周期,对于高精度地图的依赖,一直备受争议。 去年开始,不依赖甚至是无图方案成为各家车企对外宣传NOA的高频词。比如,华为就宣布将取消高精地图…
9.20 校招 实习 内推 面经
绿泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格
1、校招丨智行者2024年校园招聘正式启动啦
校招丨智行者2024年校园招聘正式启动啦 2、校招 | 乐动机器人2024校园招聘
校招 | 乐动机器人2024校园招聘 3、校招丨小天才2024届秋季校园招聘
…

【强化学习】03 ——马尔可夫决策过程
文章目录 1. 马尔科夫决策过程(Markov Decision Process,MDP)1.1. 马尔科夫性质1.2. 状态转移矩阵1.3. 马尔可夫过程1.3.1. 一个简单的例子 2. 马尔可夫奖励过程2.1. 回报2.2. 价值函数 3. 马尔科夫决策过程3.1. MDP五元组3.2. 策略3.3. 价值函数3.3.1. 状态价值函数…

两横一纵 | 寅家科技发布10年新征程战略
2023年9月22日,寅家科技“寅路向前”10年新征程战略发布会在上海举办,来自投资领域的东方富海、深创投、高新投等知名投资机构,一汽大众、一汽红旗、奇瑞汽车等主机厂,国家新能源汽车技术创新中心、梅克朗、芯驰科技、思特威等合作…
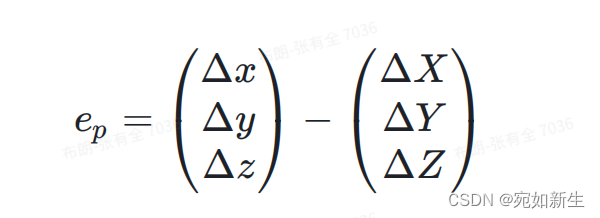
9.基于轨迹相似性理论进行自动驾驶车辆IMU和车身的外参标定
目录 0. 说明1. 组合导航产品介绍2. 标定原理3. 轨迹相似性原理3.1 航位推算3.2 轨迹相似的可视化 4. 选择车速源非常感谢您的阅读。 0. 说明
本文部分参考这篇文章,本文相关公式不清晰可以去看这篇博客。
1. 组合导航产品介绍
自动驾驶车辆一般会装有有GNSS/INS…
辅助驾驶功能开发-功能对标篇(11)-NOA领航辅助系统-长城
1.横向对标参数 厂商长城车型沙龙/机甲龙魏牌摩卡DHT-PHEV上市时间20222022Q2方案11V5R4L+1DMS12V5R2L+1DMS摄像头前视摄像头2*(8M)3侧视摄像头4*(8M)4后视摄像头1*(8M)1环视摄像头44*(1.3M)DMS摄像头11雷达毫米波雷达554D毫米波雷达//超声波雷达1212激光雷达4*(前3后1,华为ie9…
自动驾驶领域中的CMS系统应用探讨
由佐思汽研主办的“ ICVS汽车智能网联大会”正式启幕,邀请Tier1、软件供应商、操作系统商、智能驾驶及智能驾舱相关企业,共同探讨行业现状、创新技术应用交流、以及未来行业发展趋势等。
赛格导航视频产品线总监刘玉龙应邀参加本次大会,并发…
关于ROS 2内部接口
一、说明 关于ROS的接口,需要一些信息来源,以满足客户对基本概念的形成;本篇来自ROS2的官方网站,对于形成对ROS的内部接口的理解,以及进一步开发具有参考意义。
二、关于ROS 2内部接口 内部 ROS 接口是公共 C API ,供创建客户端库或添加新的底层中间件的开发人员使用,…
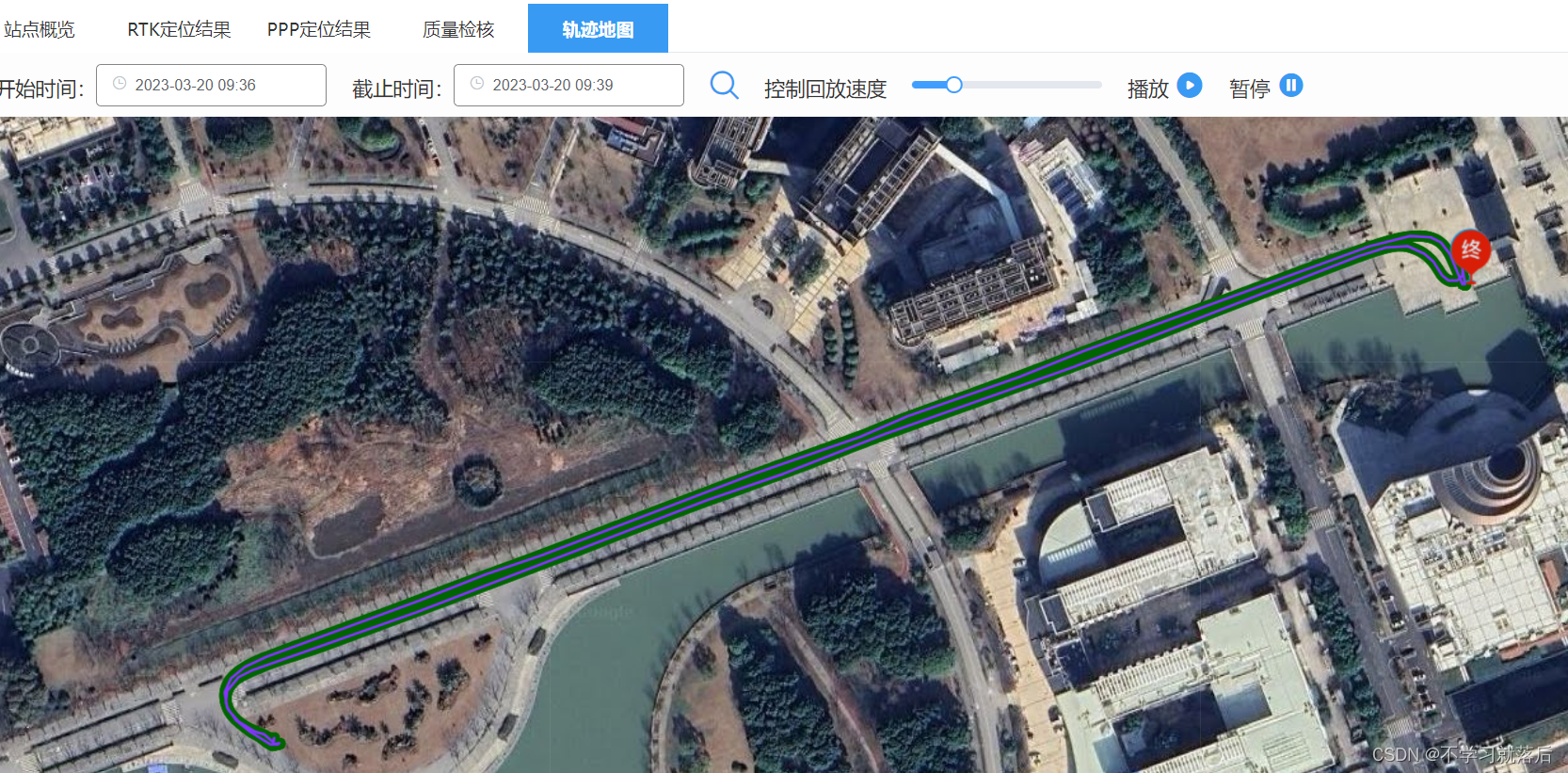
gici-open示例数据运行(1.1开阔环境数据运行)
1、配置数据和处理模式
下载对应的数据集后,首先处理1.1中的开阔环境下数据,将option目录下的配置文件复制到1.1数据目录下(若采用ROS编译,则配置文件目录为ros_wrapper/src/gici/option/ros real time estimation xxx.yaml&…
10.3 校招 实习 内推 面经
绿泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格
1、校招 | 中国移动 研究院2024秋季校园招聘正式启动
校招 | 中国移动 研究院2024秋季校园招聘正式启动 2、校招 | 进迭时空2024校园招募令!
校招 | 进迭时空2024校园招募令! 3、校招 | 华润…
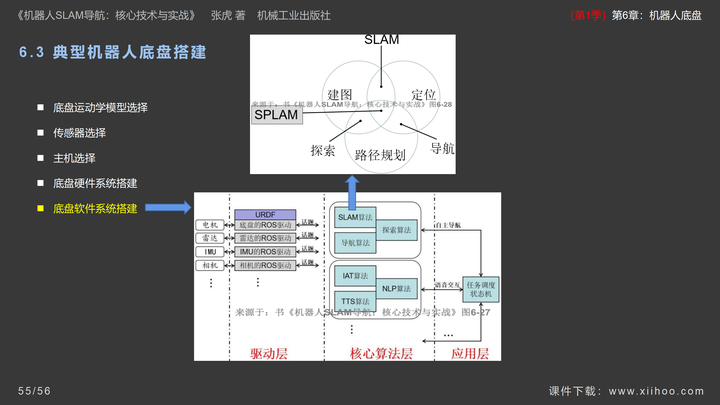
《机器人SLAM导航核心技术与实战》第1季:第6章_机器人底盘
视频讲解 【第1季】6.第6章_机器人底盘-视频讲解 【第1季】6.1.第6章_机器人底盘_底盘运动学模型-视频讲解 【第1季】6.2.第6章_机器人底盘_底盘性能指标-视频讲解 【第1季】6.3.第6章_机器人底盘_典型机器人底盘搭建-视频讲解
第1季:第6章_机器人底盘 先 导 课…
ROS1和ROS2之间的bag转换
基于python工具实现ROS2和ROS1的bag文件之间的转换
安装python工具
pip install rosbagsROS1格式的bag文件转为ROS2格式
rosbags-convert your_ros1_bag.bagROS2格式的bag文件转换为ROS1格式
# 注意命令运行的路径,your_ros2_bag_folder指的是ros2 bag的文件夹名称…
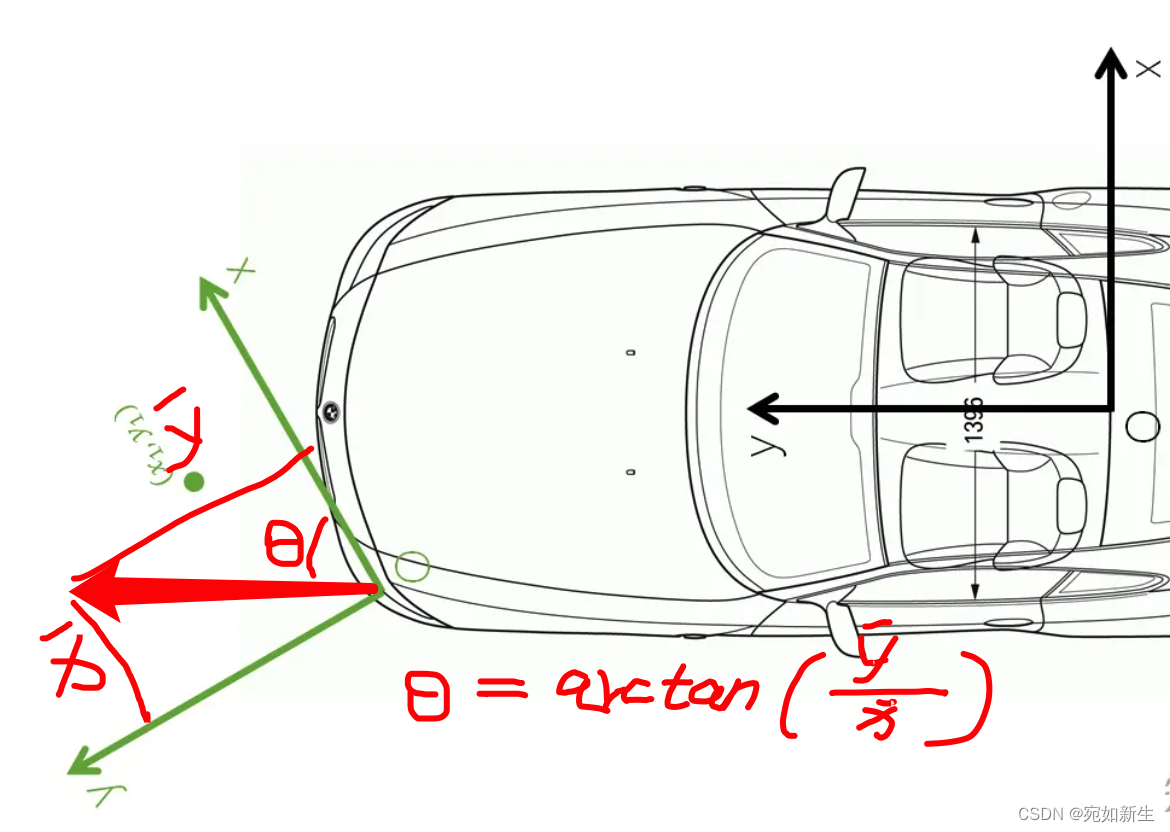
10. 激光雷达到车身坐标系外参的标定方法(lidar2car)
目录 0. 论文及代码1. 标定原理2. 拟合平面3. 标定roll/pitch/height4. 标定yaw4.1 理解从B_spline拟合的轨迹中得到vehicle航向 5. 精度 0. 论文及代码
参考论文:SensorX2car: Sensors-to-car calibration for autonomous driving in road scenarios 参考代码&…
辅助驾驶功能开发-功能对标篇(5)-NDA领航辅助系统-广汽埃安
1.横向对标参数 厂商广汽埃安车型AION LX Plus上市时间2022方案12V6R3L+1DMS摄像头前视摄像头3侧视摄像头4后视摄像头1环视摄像头4DMS摄像头1雷达毫米波雷达64D毫米波雷达/超声波雷达12激光雷达3*(速腾聚创M1,1前2侧,125线,905nm)域控供应商1(华为MDC610)辅助驾驶软件供应商欢迎…
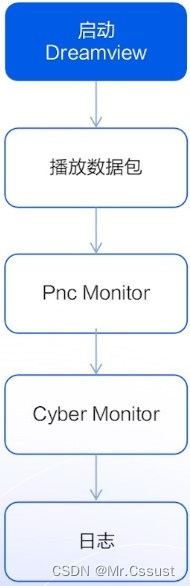
自动驾驶学习笔记(二)——Apollo入门
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往:
《自动驾驶新人之旅》免费课程—> 传送门
《2023星火培训【感知专项营】》免费课程—>传送门 文章目录
前言
Ubuntu
Linux文件系统
Linux指令…
校招时间紧很迷茫?校招机会怎么把握?没有项目简历怎么写?
校招分为秋招和春招,可以说校招是应届生零工作经验进入大厂的唯一机会。
现在十月份也是招聘的重要时间,很多公司的校招从十月份开始,现在秋招如果你没有好的offer,可以好好准备来年的春招,我们为学员准备了丰富的面试…
自动驾驶(apollo)
💓博主csdn个人主页:小小unicorn 🚚代码仓库:小小unicorn的代码仓库🚚 🌹🌹🌹关注我带你学习编程知识 自动驾驶技术 引言自动驾驶的基本原理自动驾驶的技术挑战自动驾驶的潜在影响结…
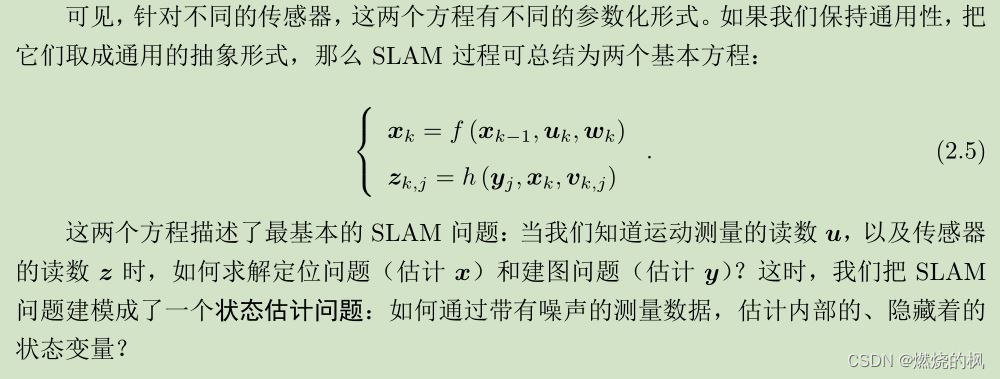

虹科分享 | 智能驾驶数据融合的时间同步关键技术
文章来源:虹科自动驾驶 阅读原文:虹科分享 | 智能驾驶数据融合的时间同步关键技术 近年来,随着汽车电子系统的升级,人们对联网智能汽车的需求不断增长,高级驾驶辅助系统(ADAS)和自动驾驶技术正迅…
辅助驾驶功能开发-功能对标篇(1)-NOA领航辅助系统-Tesla特斯拉
1.横向对标参数 厂商TESLA车型Model 3Model Y上市时间20192021摄像头前视摄像头1*三目/长焦/中焦/广角1*三目/长焦/中焦/广角侧视摄像头44后视摄像头11环视摄像头//DMS摄像头11雷达毫米波雷达1(9.0版本取消)1(9.0版本取消)4D毫米波雷达1212超声波雷达1212激光雷达//域控供应商自…
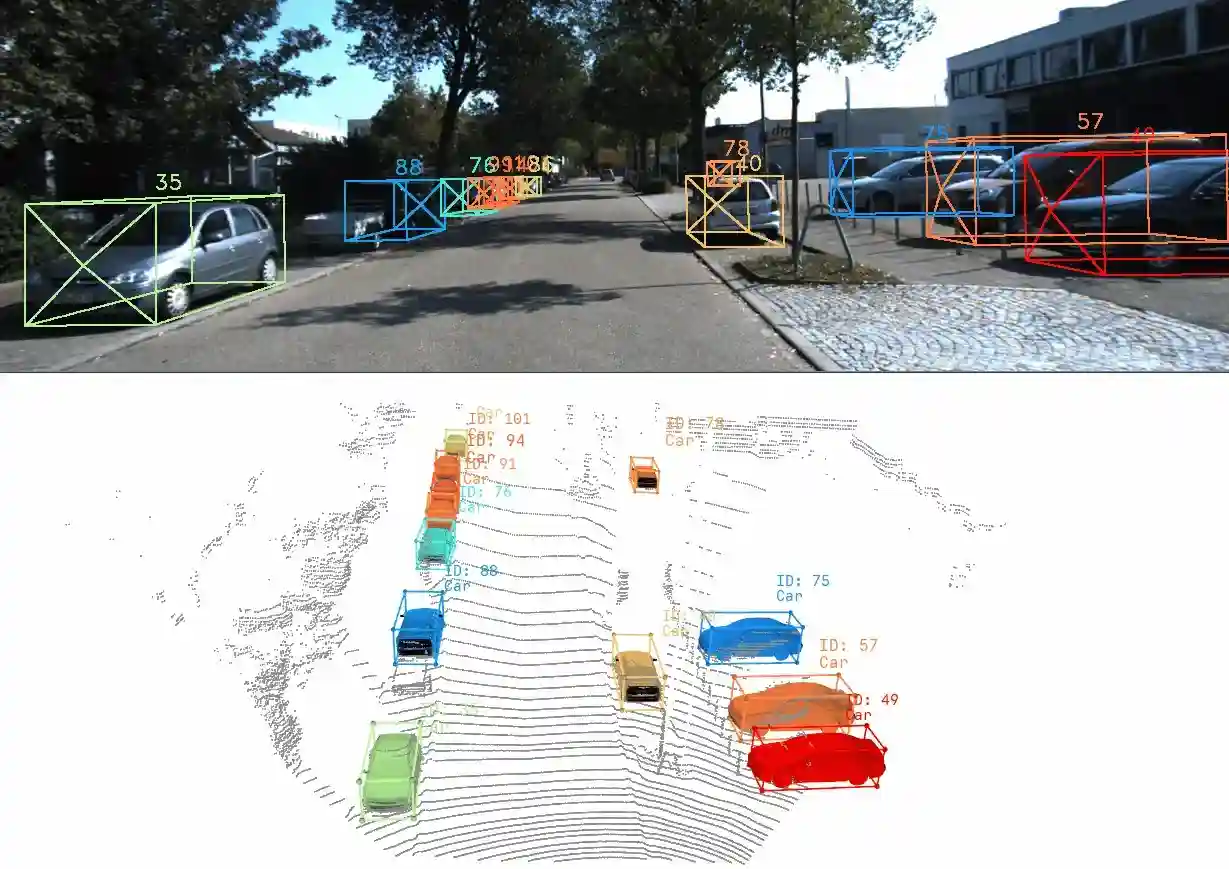
机器学习笔记 - 3D 对象跟踪极简概述
一、简述 大多数对象跟踪应用程序都是 2D 的。但现实世界是 3D 的,无论您是跟踪汽车、人、直升机、导弹,还是进行增强现实,您都需要使用 3D。在 CVPR 2022(计算机视觉和模式识别)会议上,已经出现了大量3D目标检测论文。
二、什么是 3D 对象跟踪? 对象跟踪是指随着时间的…

辅助驾驶功能开发-控制篇(01)-基于PID的横向控制算法
1 文档概述 本文档主要描述Lateral Control(横向控制)设计的功能要求、性能要求、算法推导。
2 功能要求 横向控制(Lateral Control)系统根据上层运动规划输出的期望路径、曲率等信息进行跟踪控制,以减少跟踪误差,同时保证车辆行驶平稳性和舒适性。
3 性能要求 控制系统应…

中国智能卡车“遥遥领先”:卡车NOA落地5000万公里0事故,全球首个
智能车参考 | 公众号 AI4Auto
成熟的“擎天柱”,已经可以自己出去赚钱了。 此时此刻,遍及华东、华北、华南、西北…几乎全国所有主要货运干线上,都有智能重卡承运商单。 高速路段由卡车智能驾驶系统完全承担驾驶任务,自主控制油门…

【论文阅读】MARS:用于自动驾驶的实例感知、模块化和现实模拟器
【论文阅读】MARS:用于自动驾驶的实例感知、模块化和现实模拟器 Abstract1 Introduction2 Method2.1 Scene Representation2.3 Towards Realistic Rendering2.4 Optimization3.1 Photorealistic Rendering3.2 Instance-wise Editing3.3 The blessing of moduler des…

解锁汽车自动驾驶的密码:L0到L5六个等级全解析
引言
随着智能网联汽车技术的快速发展,自动驾驶已成为汽车产业发展的重要方向。根据国际公认的标准,汽车自动驾驶可分为六个等级:L0级到L5级,等级越高意味着自动化程度越高。那么这六个等级具体有何区别呢?本文将详细介绍汽车自动驾驶的六个等级标准。 自动驾驶的6个等级(L0-…

2024北京智能科技展(世亚智博会)推动我国智能科技产业快速发展
2024北京国际智能科技展览会(世亚智博会)
2024 Shanghai Smart Product Expo
时间:2024年6月28-30日 地点:北京亦创国际会展中心
主题展:北京人工智能展览会|北京软件博览会 随着科技的飞速发展,中国正逐渐成为全球科技领域的一面旗帜。在…
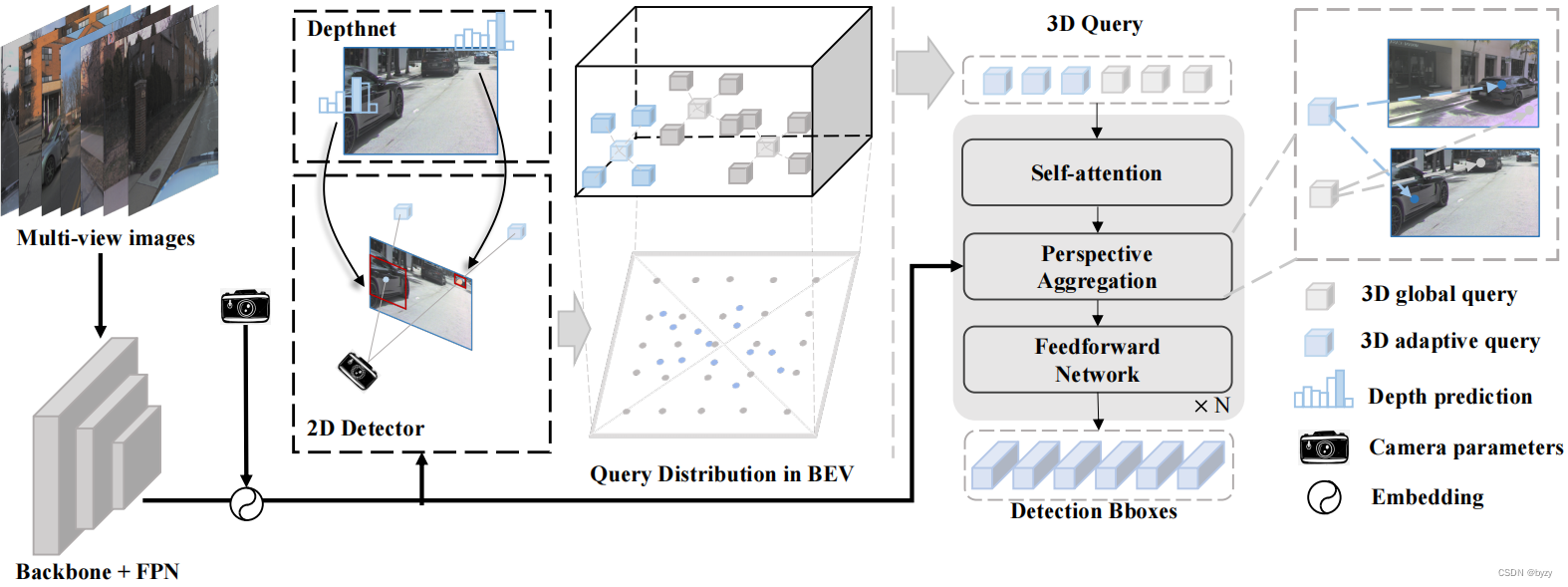
【论文笔记】Far3D: Expanding the Horizon for Surround-view 3D Object Detection
原文链接:https://arxiv.org/pdf/2308.09616.pdf
1. 引言
目前的环视图图像3D目标检测方法分为基于密集BEV的方法和基于稀疏查询的方法。前者需要较高的计算量,难以扩展到长距离检测。后者全局固定的查询不能适应动态场景,通常会丢失远距离…
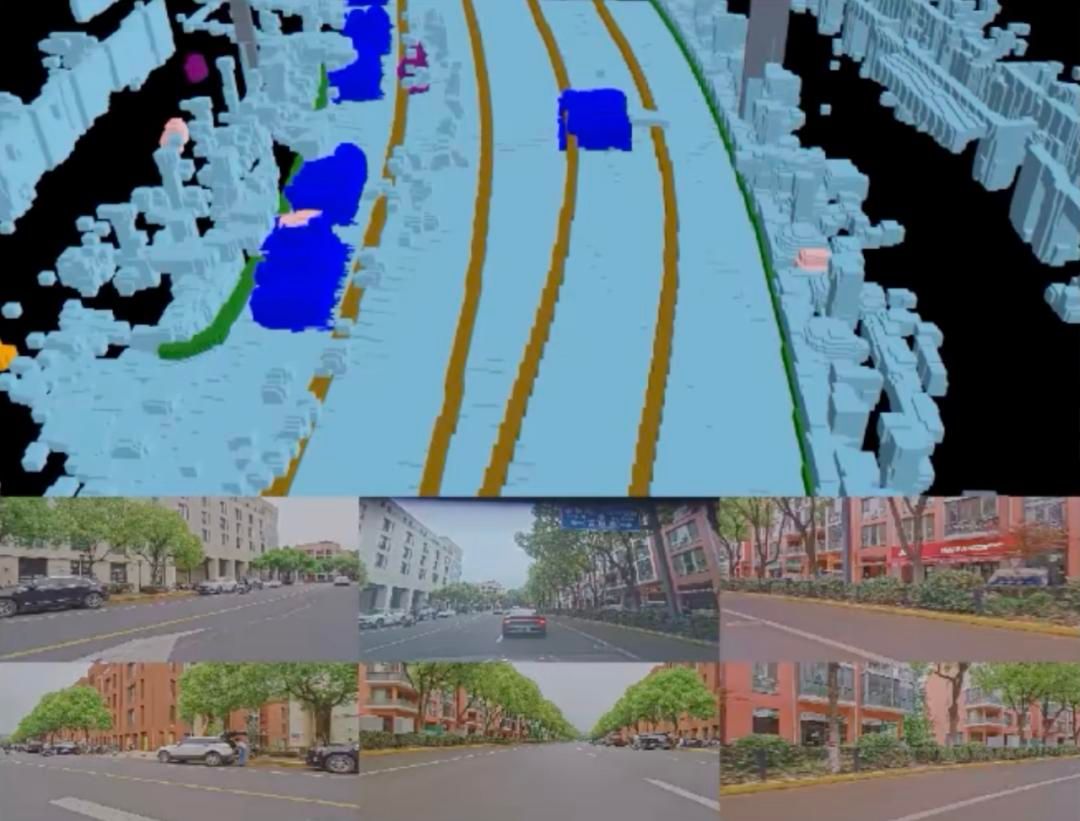
20T算力打造轻地图方案,这家智驾公司持续内卷
作者 | 张祥威
编辑 | 德新 行泊一体的话题热度不减。
近日,宏景智驾核心产品单SoC行泊一体解决方案已全场景跑通,可实现高速导航辅助驾驶。
在推进量产的同时,宏景智驾也在布局BEV感知、轻高精地图甚至去高精地图的智驾方案,同…
先后在影酷/传祺E9/昊铂GT量产交付,这家ADAS厂商何以领跑
智能泊车赛道正在迎来黄金增长期,以魔视智能为代表的玩家正在驶入大规模量产的“快车道”。
继在广汽传祺影酷、广汽传祺 E9实现规模化量产交付之后,魔视智能的Magic Parking智能泊车系列解决方案再度在广汽埃安旗下高端智能轿跑——昊铂GT上面实现量产…
图像识别在自动驾驶汽车中的多传感器融合技术
摘要: 介绍文章的主要观点和发现。
引言:
自动驾驶汽车的兴起和重要性。多传感器融合技术在自动驾驶中的关键作用。
第一部分:图像识别技术
图像识别的基本原理。图像传感器和摄像头在自动驾驶中的应用。深度学习和卷积神经网络ÿ…

职能篇—自动驾驶产品经理
自动驾驶产品开发流程 在讲自动驾驶产品经理之前,先简单了解一下自动驾驶的开发体系。如上图所示,从产品需求开始,经由系统需求、系统架构、软件需求、软件架构,最终分解到软件代码实现模块,再经由MIL、SIL、HIL、VIL完…
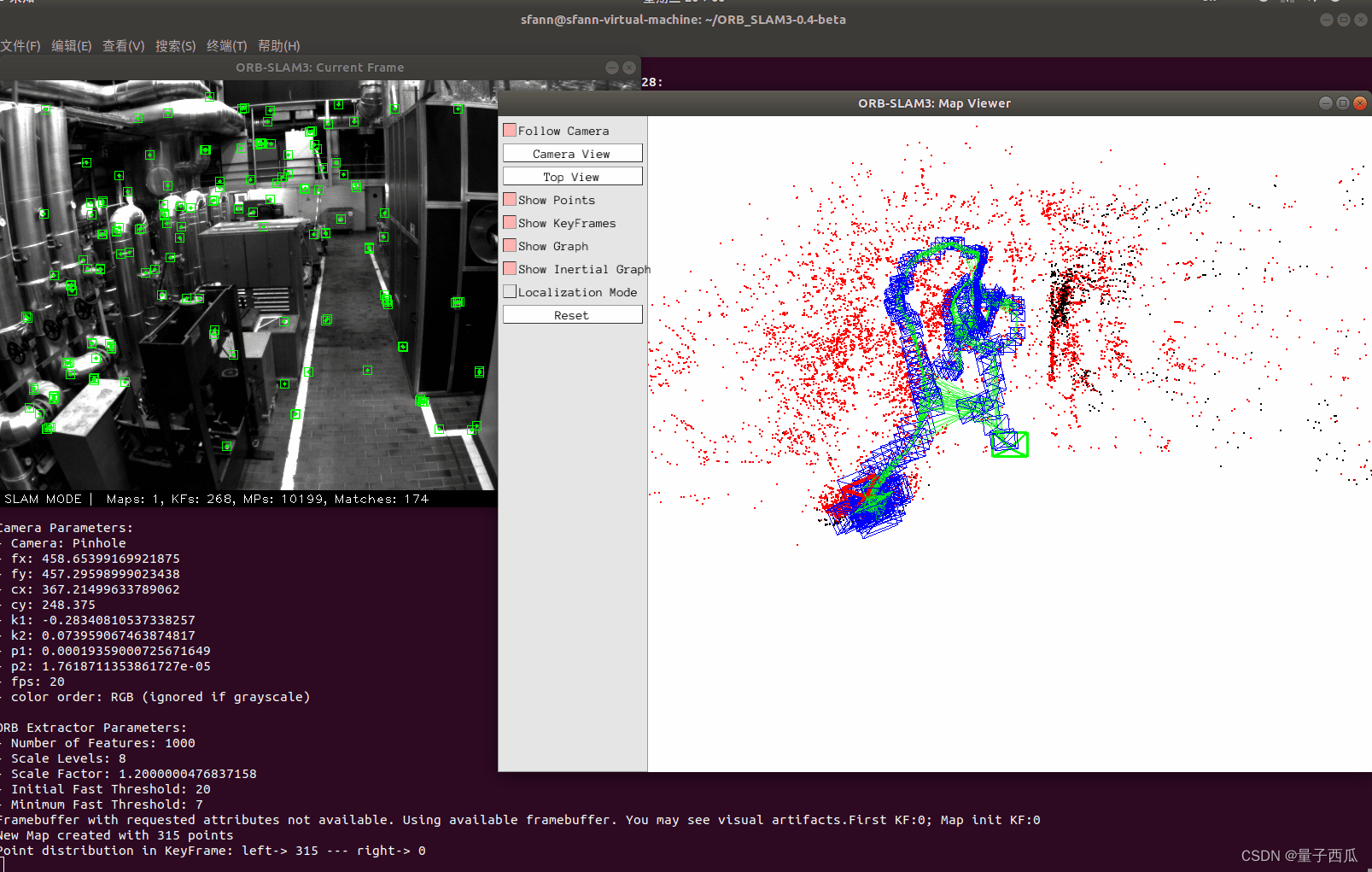
orb-slam3编译手册(Ubuntu20.04)
orb-slam3编译手册(Ubuntu20.04) 一、环境要求1.安装git2.安装g3.安装CMake4.安装vi编辑器 二、源代码下载三、依赖库下载1.Eigen安装2.Pangolin安装3.opencv安装4.安装Python & libssl-dev5.安装boost库 三、安装orb-slam3四、数据集下载及测试 写在…
ROS | 命名空间
文章目录 概述一、定义介绍二、原理解读1.命名空间2.调用规则概述 本节详细介绍了ROS中的命名空间机制原理和使用。
一、定义介绍 在ROS(Robot Operating System)中,命名空间是一种用于组织和区分节点、话题、服务和参数等资源的层次结构。命名空间使用斜线(/)作为分隔符…

激光雷达标定板在自动驾驶中的具体应用步骤
激光雷达标定板在自动驾驶领域中发挥着重要的作用,它不仅可以提高激光雷达的感知精度和稳定性,还可以测试和评估自动驾驶车辆的性能和安全性,为自动驾驶技术的发展和应用提供了重要的支持和保障。 激光雷达标定板在自动驾驶中的具体应用步骤包…
10.21 校招 实习 内推 面经
绿*泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格
1、校招 | 本田技研2024届校园招聘
校招 | 本田技研2024届校园招聘 2、校招 | smart 2024届校园招聘开启
校招 | smart 2024届校园招聘开启 3、校招|中兴微电子2024届 软件开发…
10月26日,每日信息差
今天是2023年10月26日,以下是为您准备的16条信息差
第一、抖音旗下公司申请“醒言AI”“简涌AI”商标
第二、小i华藏通用大模型生态正式开启。据介绍,华藏生态以1个能力基座(华藏通用大模型)、1个产品支撑(华藏开发者…

自动驾驶之—LaneAF学习相关总结
0.前言: 最近在学习自动驾驶方向的东西,简单整理一些学习笔记,学习过程中发现宝藏up 手写AI
1. 概述 Laneaf思想是把后处理放在模型里面。重点在于理解vaf, haf,就是横向聚类:中心点,纵向聚类&…
机器视觉在自动驾驶汽车中的应用与挑战
机器视觉在自动驾驶汽车中扮演着至关重要的角色,它使车辆能够感知和理解周围环境,以便自主驾驶。以下是机器视觉在自动驾驶汽车中的应用以及相关挑战:
应用: 障碍物检测与避让: 机器视觉系统可以检测和识别路上的障碍…

LIO-SAM算法解析
文章目录 简介算法概述1.点云去畸变1.1 主要功能1.2 主要流程 2.特征提取3.IMU预积分4.地图优化5.算法评估 简介
LIO-SAM在lego-loam的基础上新增了对IMU和GPS的紧耦合,采用一个因子图对位姿进行优化,包括IMU因子,激光里程计因子,…
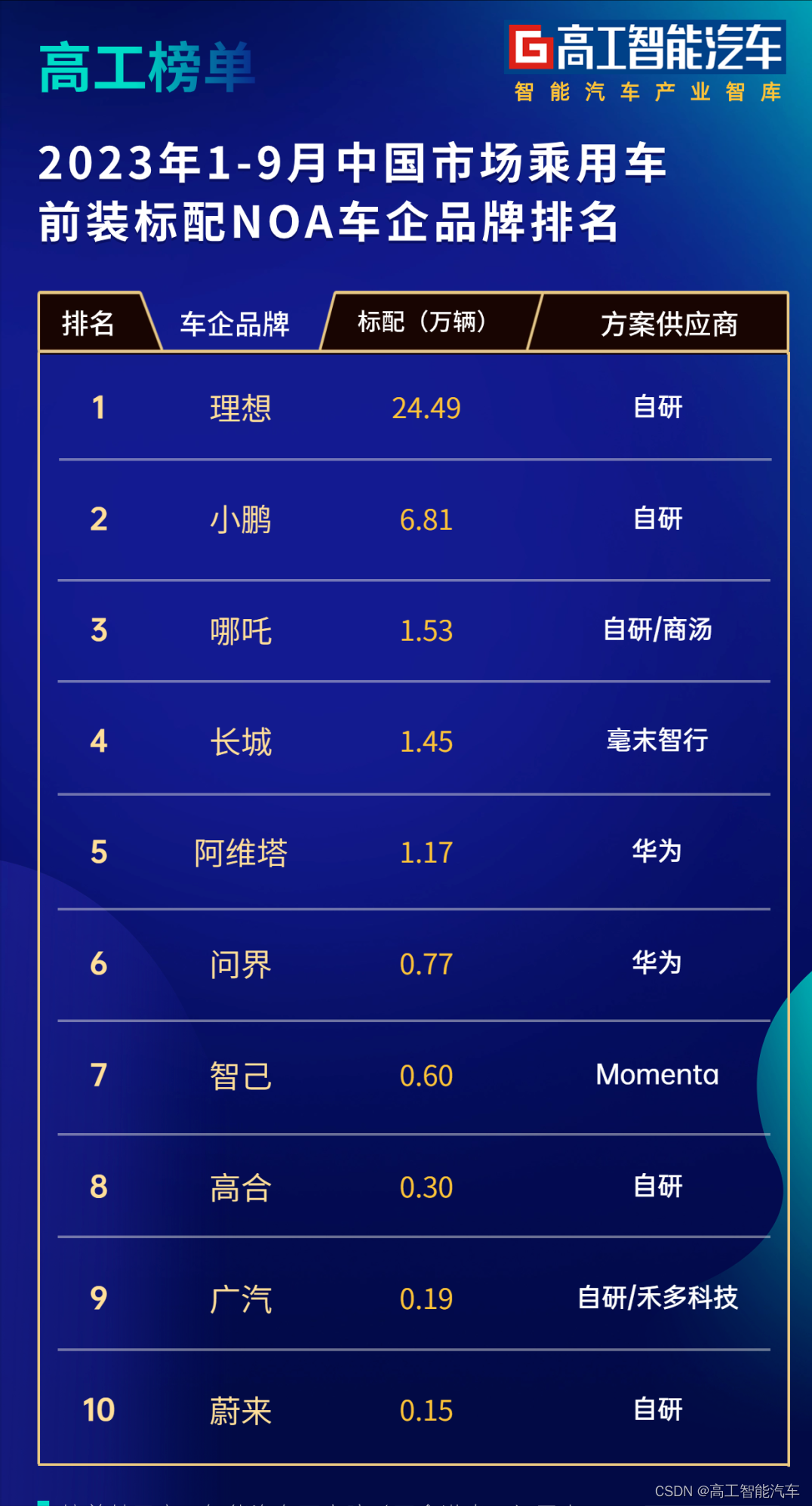
前三季度NOA同比增长超150%,背后是一场残酷「成本」大战
NOA赛道的争夺战,已经成为车企智能化的重要标签。
今年,代号为W214的第六代奔驰全新E级将在全球多个国家陆续上市,其中,在中国市场,将首次搭载高速领航驾驶系统,实现点到点的智能辅助驾驶(高速…

GPS学习(一):在ROS2中将GPS经纬度数据转换为机器人ENU坐标系,在RVIZ中显示坐标轨迹
文章目录 一、GPS模块介绍二、坐标转换转换原理参数解释: 增加回调函数效果演示 本文记录在Ubuntu22.04-Humbel中使用NMEA协议GPS模块的过程,使用国产ROS开发板鲁班猫(LubanCat )进行调试。
一、GPS模块介绍
在淘宝找了款性价比较高的轮趣科技GPS北斗双…
基于图像识别的自动驾驶汽车障碍物检测与避障算法研究
基于图像识别的自动驾驶汽车障碍物检测与避障算法研究是一个涉及计算机视觉、机器学习、人工智能和自动控制等多个领域的复杂问题。以下是对这个问题的研究内容和方向的一些概述。
障碍物检测
障碍物检测是自动驾驶汽车避障算法的核心部分,它需要从车辆的感知数据…
Apollo安装全攻略
安装方式 概述快速安装安装基础软件安装 Ubuntu Linux安装 Docker Engine 安装 Apollo 环境管理工具获取 GPU 支持(可选)创建和进入 Apollo 环境容器 源码安装安装 Linux 系统(可选)安装 NVIDIA GPU 驱动安装 docker下载并编译 Ap…
10.12 校招 实习 内推 面经
绿*泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格
1、校招 | 2024届秋招,美团哪些校招岗位最缺人?(内推)
校招 | 2024届秋招,美团哪些校招岗位最缺人?(内推&…
Apollo 快速上手指南:打造自动驾驶解决方案
快速上手 概述云端体验登录云端仿真环境 打开DreamView播放离线数据包PNC Monitor 内置的数据监视器cyber_monitor 实时通道信息视图福利活动 主页传送门:📀 传送 概述 Apollo 开放平台是一个开放的、完整的、安全的平台,将帮助汽车行业及自…
【AI视野·今日Robot 机器人论文速览 第五十四期】Fri, 13 Oct 2023
AI视野今日CS.Robotics 机器人学论文速览 Fri, 13 Oct 2023 Totally 45 papers 👉上期速览✈更多精彩请移步主页 Daily Robotics Papers
Universal Visual Decomposer: Long-Horizon Manipulation Made Easy Authors Zichen Zhang, Yunshuang Li, Osbert Bastani, …

【AI视野·今日Robot 机器人论文速览 第五十三期】Thu, 12 Oct 2023
AI视野今日CS.Robotics 机器人学论文速览 Thu, 12 Oct 2023 Totally 25 papers 👉上期速览✈更多精彩请移步主页 Daily Robotics Papers
Pixel State Value Network for Combined Prediction and Planning in Interactive Environments Authors Sascha Rosbach, St…
cartographer中的扫描匹配
cartographer中的扫描匹配
cartographer中使用了两种扫描匹配方法:CSM(相关性扫描匹配方法(暴力匹配))、ceres优化匹配方法
CSM可以简单地理解为暴力搜索,即每一个激光数据与子图里的每一个位姿进行匹配&…
【自动驾驶】Free space与Ray casting
文章目录 1 Free space是什么2 Ray casting是什么3 它俩啥关系4 TODO 1 Free space是什么
在自动驾驶领域,free space即可行驶区域,在结构化道路的十字路口/非结构化道路都有很大作用。
2 Ray casting是什么
ray casting是计算机视觉领域,…
图像识别在自动驾驶汽车中的决策规划与控制策略研究。
图像识别在自动驾驶汽车中的决策规划与控制策略研究
随着自动驾驶技术的不断发展,图像识别已经成为实现自动驾驶的关键技术之一。在自动驾驶汽车中,图像识别技术主要用于环境感知、决策规划和控制系统。本文将重点探讨图像识别在自动驾驶汽车中的决策规…
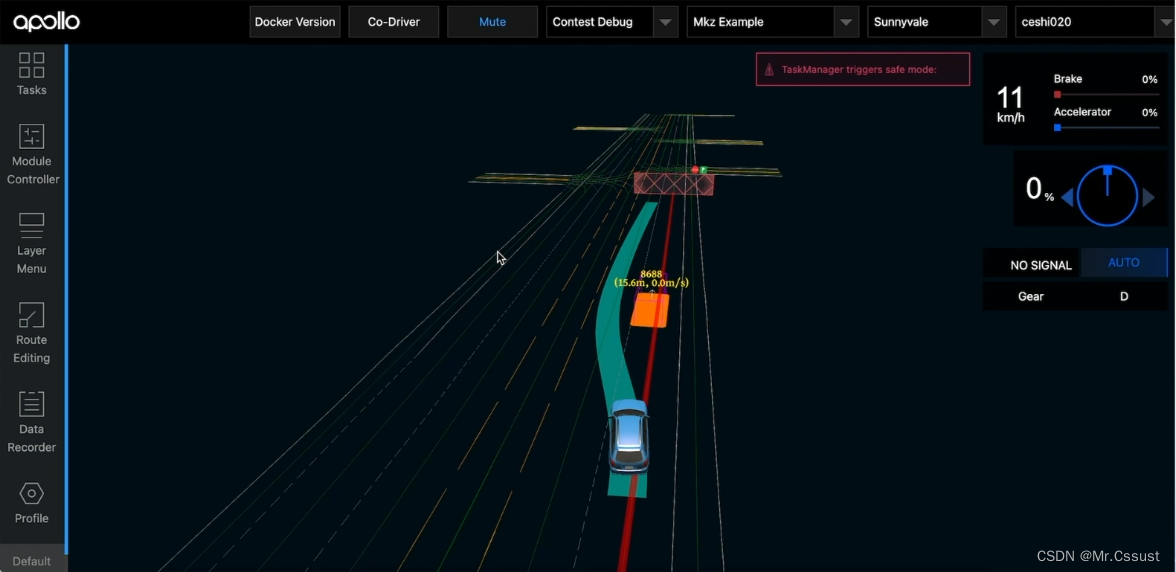
自动驾驶学习笔记(四)——变道绕行仿真
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往:
《自动驾驶新人之旅》免费课程—> 传送门
《2023星火培训【感知专项营】》免费课程—>传送门 文章目录
前言
仿真内容
启动Dreamview
开启Sim…
社区活动|Apollo开发者城市活动·长沙站来啦!
Apollo开发者城市活动长沙站 2023/10/22
🙋想亲身乘坐无人车,感受自动驾驶技术的魅力吗?
🙋想与技术大咖面对面,了解自动驾驶的历史与原理吗?
🙋想与本地开发者交流心得,实现自动…

毫米波雷达模块技术革新:在自动驾驶汽车中的前沿应用
随着自动驾驶技术的快速发展,毫米波雷达模块的技术革新成为推动这一领域的关键因素之一。本文将深入研究毫米波雷达模块技术的最新进展,并探讨其在自动驾驶汽车中的前沿应用。 毫米波雷达模块的基本原理
解释毫米波雷达模块的基本工作原理,强…
10月11日,每日信息差
今天是2023年10月11日,以下是为您准备的16条信息差
第一、SHEIN在广州投资百亿的湾区供应链项目提速。该湾区供应链项目将建设集运营仓储、备货、拣货、分拨、发货等为一体的供应链仓储物流中心
第二、国内首条碳化法荧光级氧化镁中试生产线在青海建成。据了解&am…
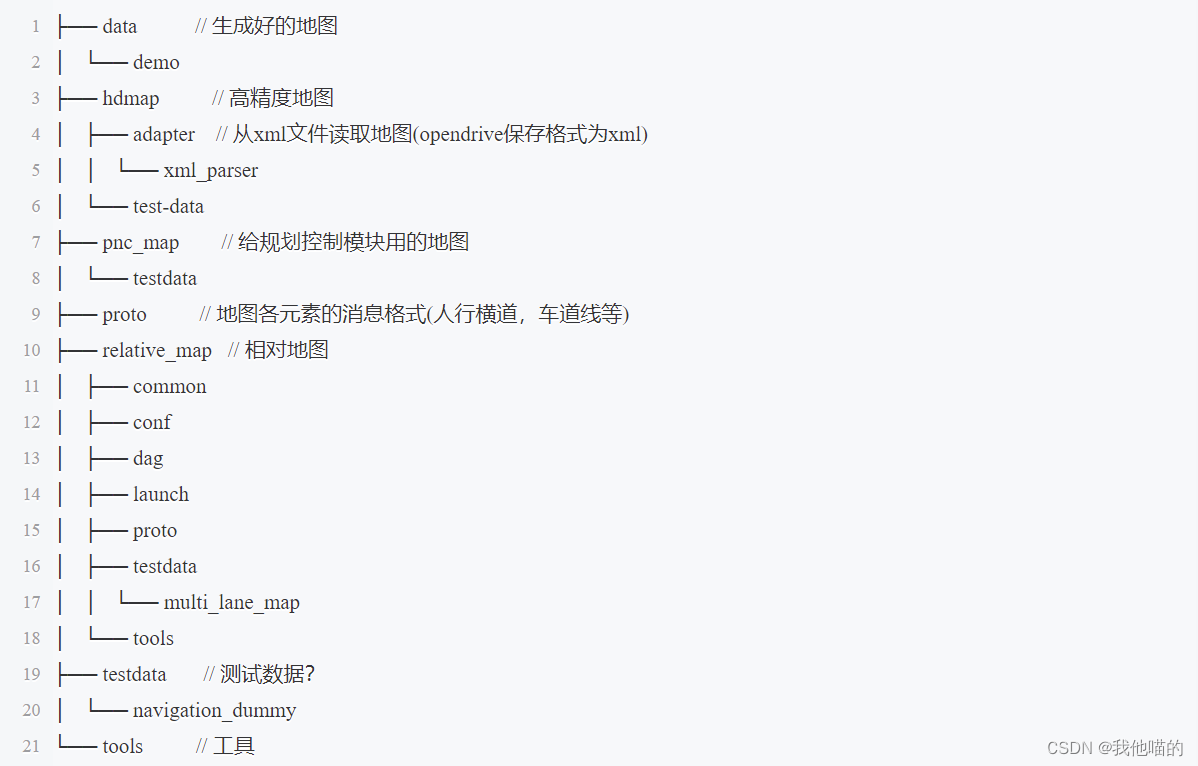
9月11日,每日信息差
今天是2023年09月11日,以下是为您准备的13条信息差
第一、微软已停止向俄罗斯提供服务,俄罗斯接下来的举动震惊世人!对此俄罗斯回应称,他们将把微软的收费版改为免费版并推广至全球
第二、我国首套海洋漂浮式温差能发电装置完成…
move_base代码阅读
前置知识
tf2::Transform::getIdentity() 是ROS (Robot Operating System) 中的一个函数,通常用于机器人控制和机器人操作中的坐标变换操作。这个函数的作用是创建一个表示"单位"或"恒等"变换的 tf2::Transform 对象。
costmap的分层机制
St…
MIT Kimera-VIO-ROS 安装
前言
我安装Kimera-VIO-ROS的时间是2023.10.28。由于已经离Kimera发布过去两年,所以遇到版本不同步问题,Kimera-VIO,Kimera-VIO-ROS,GTSAM的版本需要精心挑选。
Kimera-VIO在2021.07.01之后没有更新,git commit版本为…
关于pcl 给new出的数据赋值报错问题
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>); for (size_t i 0; i < cloud->points.size (); i) //填充数据 { cloud->points[i].x 1024 * rand () / (RAND_MAX 1.0f); cloud->points[i].y 1024…
Apollo上机实践:一次对自动驾驶技术的亲身体验
上机实践 概述自动驾驶通信分布式系统开发模式开发工具 自动驾驶感知传感器特性感知流程及算法部署感知模型 自动驾驶决策规划决策规划流程和算法使用 Dreamview 进行控制在环的规划调试开发规划场景和算法 福利活动 主页传送门:📀 传送 概述 Apollo 是…
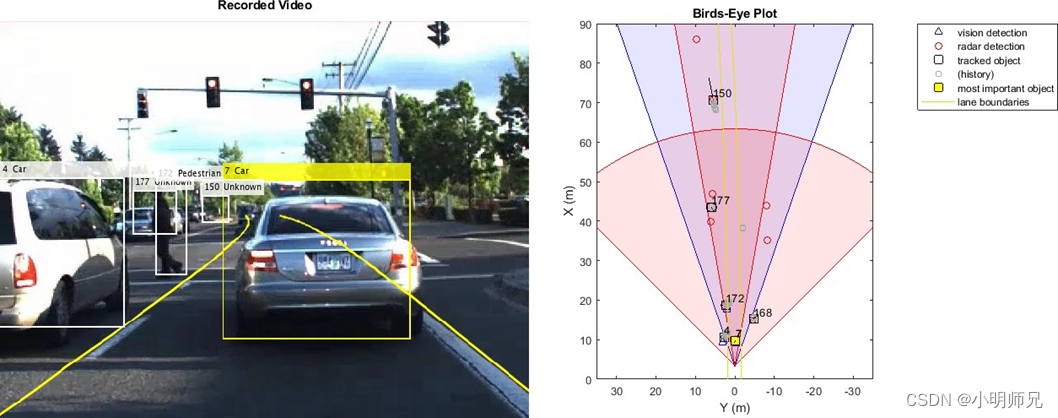
使用传感器融合的前方碰撞预警-(Forward Collision Warning Using Sensor Fusion)
这个例子matlab自动驾驶工具箱中关于使用传感器融合的前方碰撞预警-(Forward Collision Warning Using Sensor Fusion)例子,其展示了如何通过融合视觉和雷达传感器的数据来跟踪车辆前方的物体,从而实现前向碰撞预警系统的开发与验证。
1 概述
前方碰撞…

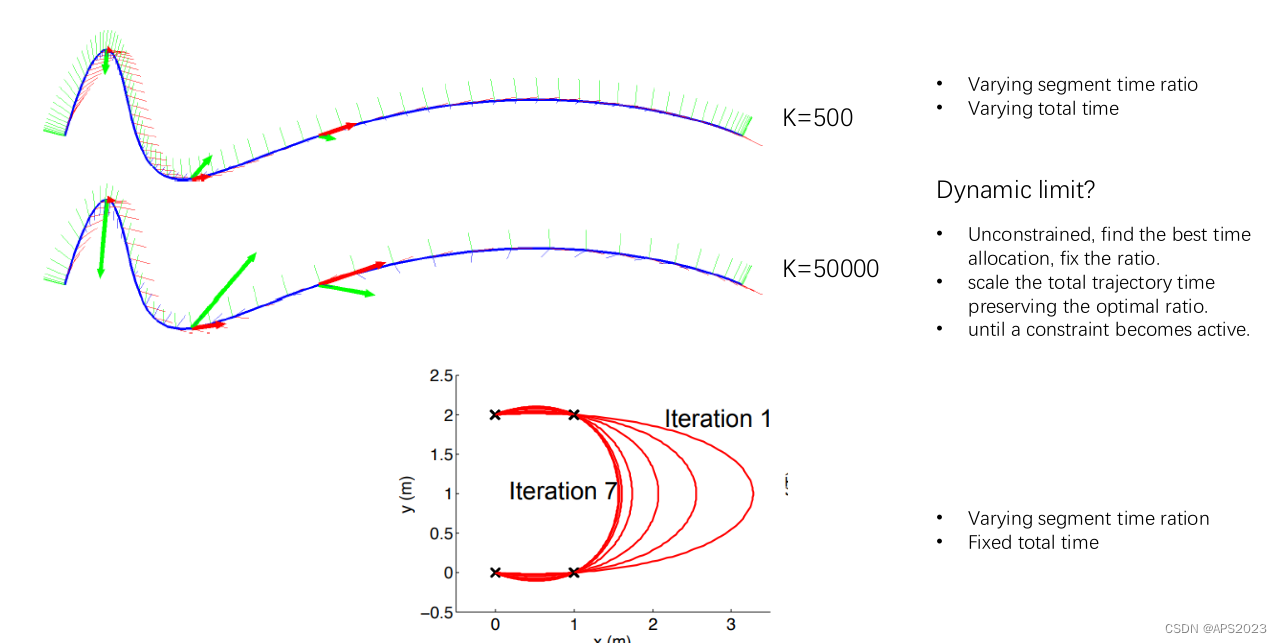
移动机器人路径规划(五)--- 基于Minimun Snap的轨迹优化
目录 1 我们本节主要介绍的
2 Minimum Snap Optimization
2.1 Differential Flatness(微分平坦)
2 Minimum Snap
3 Closed-form Solution to Minimum Snap
3.1 Decision variable mapping 待优化问题的映射
4 凸优化 及其它问题 1 我们本节主要介…
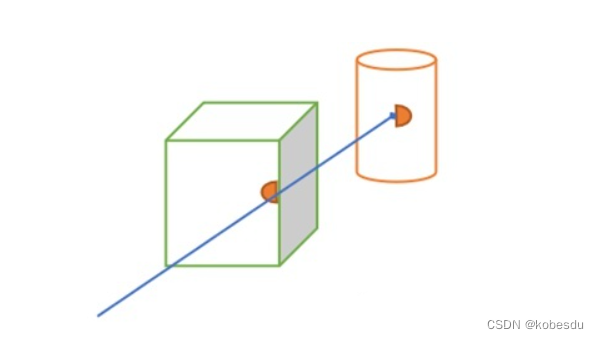
辅助驾驶功能开发-功能规范篇(22)-8-L2级辅助驾驶方案功能规范
接上回
1.3.7.1.9 自动紧急制动 自动紧急制动根据危险等级分为部分紧急制动(AEB-P)和中度紧急制动(AEB-M)。当AEB功能触发时,通过发送:AEB目标减速度:“ACC_AEBTargetDeceleration”、 AEB减速请求有效信号:“ACC_AEBActive”和AEB类型信号 “ACC_AEBCtrlType”为AEB …
激光雷达标定板如何提高激光雷达避免误判的精准度
激光雷达在提高自动驾驶的安全性方面具有重要作用。它通过高精度测量、避免误判、实时感知、适应不同环境和结合其他传感器等方式,为自动驾驶系统提供准确、可靠的感知数据,从而确保行驶的安全性和稳定性。 激光雷达可以通过以下方式避免误判:…

自动驾驶的法律和伦理问题
随着自动驾驶技术的不断发展,出现了一系列与法律和伦理有关的问题。这些问题涵盖了自动驾驶的法律框架、道路规则以及伦理挑战。本文将探讨这些问题,并分析自动驾驶所带来的法律和伦理挑战。
自动驾驶的法律框架
自动驾驶的法律框架是制定和管理自动驾…
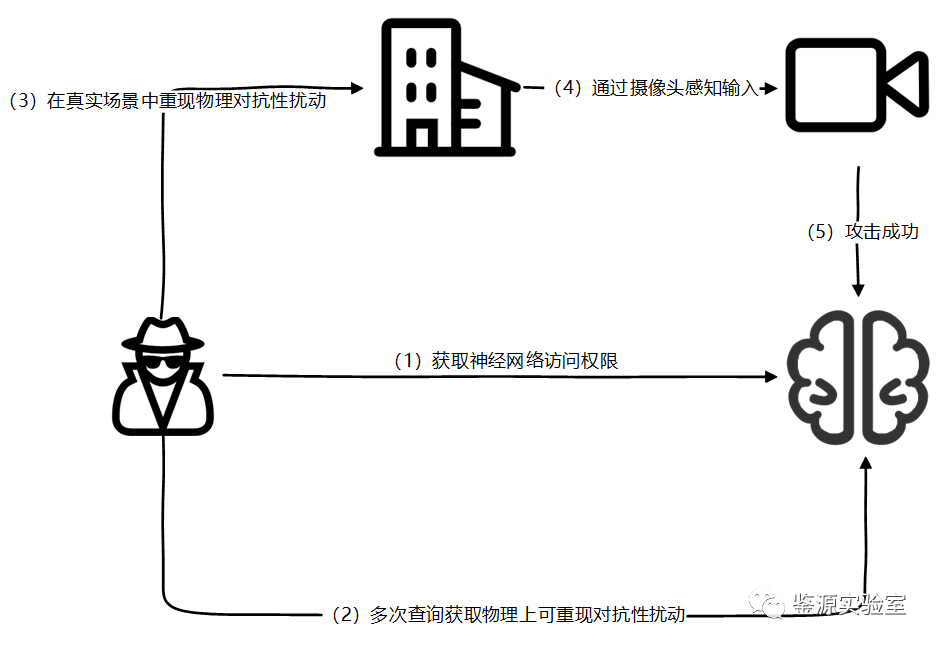
鉴源实验室 | 自动驾驶传感器攻击研究
作者 | 付海涛 上海控安可信软件创新研究院汽车网络安全组
来源 | 鉴源实验室
社群 | 添加微信号“TICPShanghai”加入“上海控安51fusa安全社区” 01
自动驾驶汽车的脆弱性 自2015年以来,汽车的信息安全问题受到国内外的广泛关注。而随着汽车的智能化与网联化的…

pix2tex - LaTeX OCR 安装使用记录
系列文章目录 文章目录 系列文章目录前言一、安装二、使用三、如果觉得内容不错,请点赞、收藏、关注 前言
项目地址:这儿 一、安装
版本要求 Python: 3.7 PyTorch: >1.7.1
安装:pip install "pix2tex[gui]"
注意:…
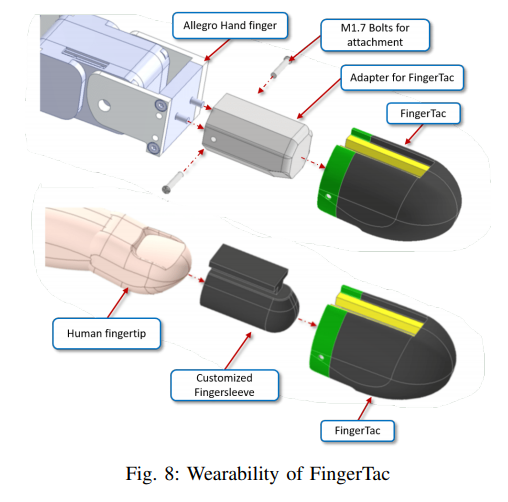
【AI视野·今日Robot 机器人论文速览 第五十五期】Mon, 16 Oct 2023
AI视野今日CS.Robotics 机器人学论文速览 Mon, 16 Oct 2023 Totally 27 papers 👉上期速览✈更多精彩请移步主页 Interesting:
📚***AcTExplore, 对于未知物体的主动触觉感知。基于强化学习自动探索物体的表面形貌,增量式重建。(from 马里兰…

【论文笔记】Point Cloud Forecasting as a Proxy for 4D Occupancy Forecasting
原文链接:https://arxiv.org/abs/2302.13130
1. 引言
运动规划需要预测其余物体的运动,但相应的感知模块如建图、目标检测、跟踪和轨迹预测通常都需要大量人力标注HD地图、语义标签、边界框或物体的轨迹,难以扩展到大型无标签数据集上。3D点…
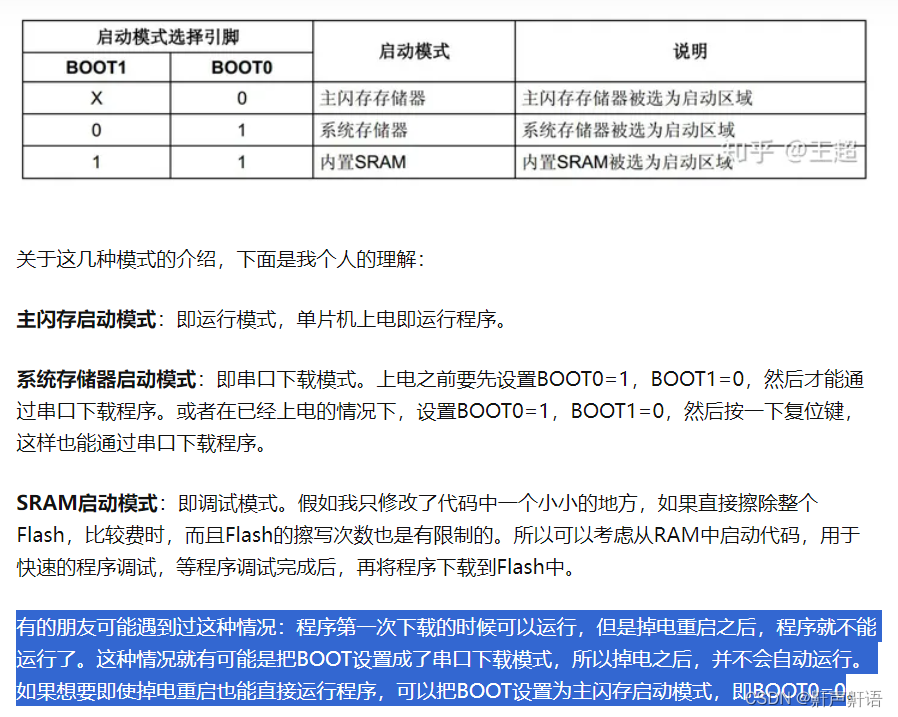
STM32下载程序,可以使用串口了,但是要对的boot进行设置,以及boot的使用,直接烧录,可以运行,但是下次复位,得先换BOOT0为0
STM32下载程序串口下载stm32程序 注意:直接烧录,可以运行,但是下次复位,得先换BOOT0为0 有的朋友可能遇到过这种情况:程序第一次下载的时候可以运行,但是掉电重启之后,程序就不能运行了。这种情…
10.29 校招 实习 内推 面经
绿*泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、自动驾驶一周资讯 - 通用Cruise暂停无人驾驶业务,Stellantis15亿欧元获零跑20%股权,1-8月行泊一体域控排名
自动驾驶一周资讯 - 通用Cruise暂停无人驾驶业务&#…
官网教程——Cmake 中的重要概念
文章目录 前言一、重要概念——目标(Target)1.1 使用要求1.2 使用目标指定优化库或调试库1.3 对象库1.4 源文件1.5 目录、测试和属性 二、Policies2.1 设计目标2.2 Setting Policies 三、Modules(模块,组)3.1 使用模块…
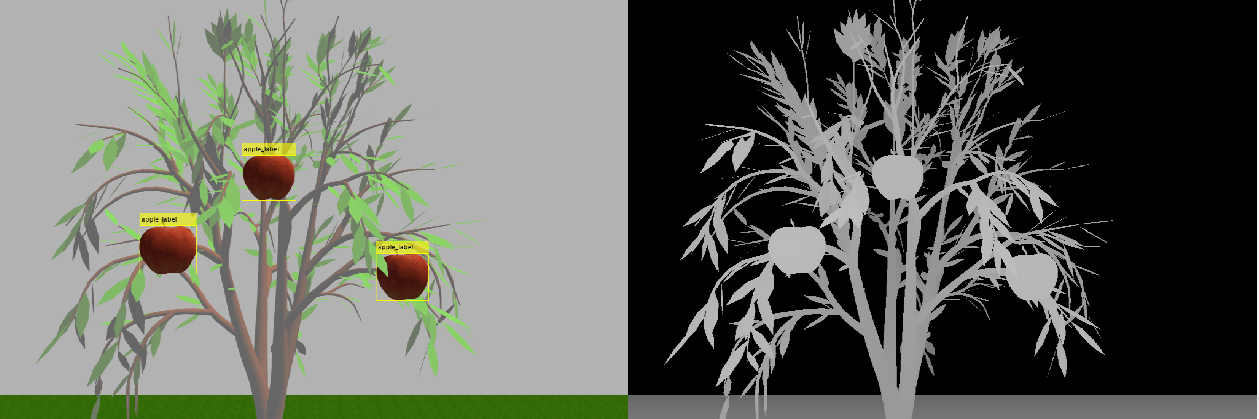
MATLAB - Gazebo 联合仿真 —— 使用 UR10 机械臂检测和采摘水果
系列文章目录 文章目录 系列文章目录前言一、设置 Gazebo 仿真环境二、在 Gazebo 中模拟和控制机器人2.1 概述2.2 任务调度器2.3 感知和目标生成系统2.4 运动规划2.5 机械臂和关节控制系统 三、分配用于控制机器人的参数3.1 定义机器人模型和运动规划参数,3.2 定义机…
百万套行泊一体量产定点,中国市场「开启」智驾高低速集成
进入2023年,席卷中国市场的行泊一体概念方案进入定点、量产交付的第一波高峰期。这套方案,以高性价比、硬件复用、高低速智驾集成的模式,备受市场青睐。
本周,纵目科技宣布,Amphiman3000行泊一体产品获得长安汽车旗下…
智能交通和自动驾驶技术
一、定义
智能交通和自动驾驶技术是指利用先进的信息技术和人工智能技术,实现交通系统的智能化和自动化。智能交通和自动驾驶技术不仅可以提高交通系统的效率和安全性,还可以改善人们的出行体验,促进城市可持续发展。
智能交通和自动驾驶技…
Cmake 中的重要概念
文章目录 前言一、重要概念——目标(Target)1.1 使用要求1.2 使用目标指定优化库或调试库1.3 对象库1.4 源文件1.5 目录、测试和属性 二、Policies2.1 设计目标2.2 Setting Policies 三、Modules(模块,组)3.1 使用模块…
10.31 校招 实习 内推 面经
绿*泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、校招|七腾机器人2024届秋季校园招聘正式启动
校招|七腾机器人2024届秋季校园招聘正式启动 2、校招|埃斯顿研究运动控制与机器人2024届校园招聘
校招&a…
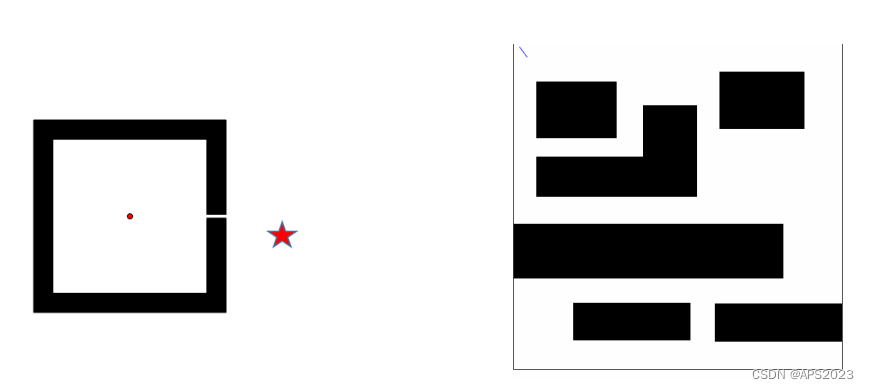
自动驾驶算法(八):基于概率图算法的路径规划--以PRM为例以及路径规划算法总结
目录 1 概率路线算法简介
2 代码解析
3 路径规划算法总结 1 概率路线算法简介 它属于采样算法里面的一类。主要步骤分为两步: 1.构建概率路线图 (1)随机采样点 (2)将新采样点和距离小于阈值的 采样点连接产生图 2.在图上寻找路径 (1)Dijkstra算法…
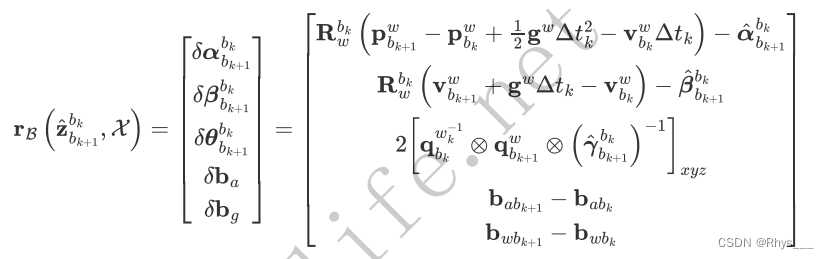
VINS-Mono-后端优化 (一:预积分残差计算-IMU预积分约束)
这里先回顾一下预积分是怎么来的 VINS-Mono-IMU预积分 (三:为什么要预积分预积分推导) 这里贴出预积分的公式 具体含义解释看对对应的文章 整个误差函数如下 预积分 α \alpha α β \beta β γ \gamma γ 是用 IMU 预积分获得的增量&a…
AI:79-基于卷积神经网络的自动驾驶车辆道路边界检测
🚀 本文选自专栏:人工智能领域200例教程专栏 从基础到实践,深入学习。无论你是初学者还是经验丰富的老手,对于本专栏案例和项目实践都有参考学习意义。 ✨✨✨ 每一个案例都附带有在本地跑过的代码,详细讲解供大家学习,希望可以帮到大家。欢迎订阅支持,正在不断更新中,…

CCF ChinaSoft 2023 论坛巡礼 | 自动驾驶仿真测试论坛
2023年CCF中国软件大会(CCF ChinaSoft 2023)由CCF主办,CCF系统软件专委会、形式化方法专委会、软件工程专委会以及复旦大学联合承办,将于2023年12月1-3日在上海国际会议中心举行。 本次大会主题是“智能化软件创新推动数字经济与社…
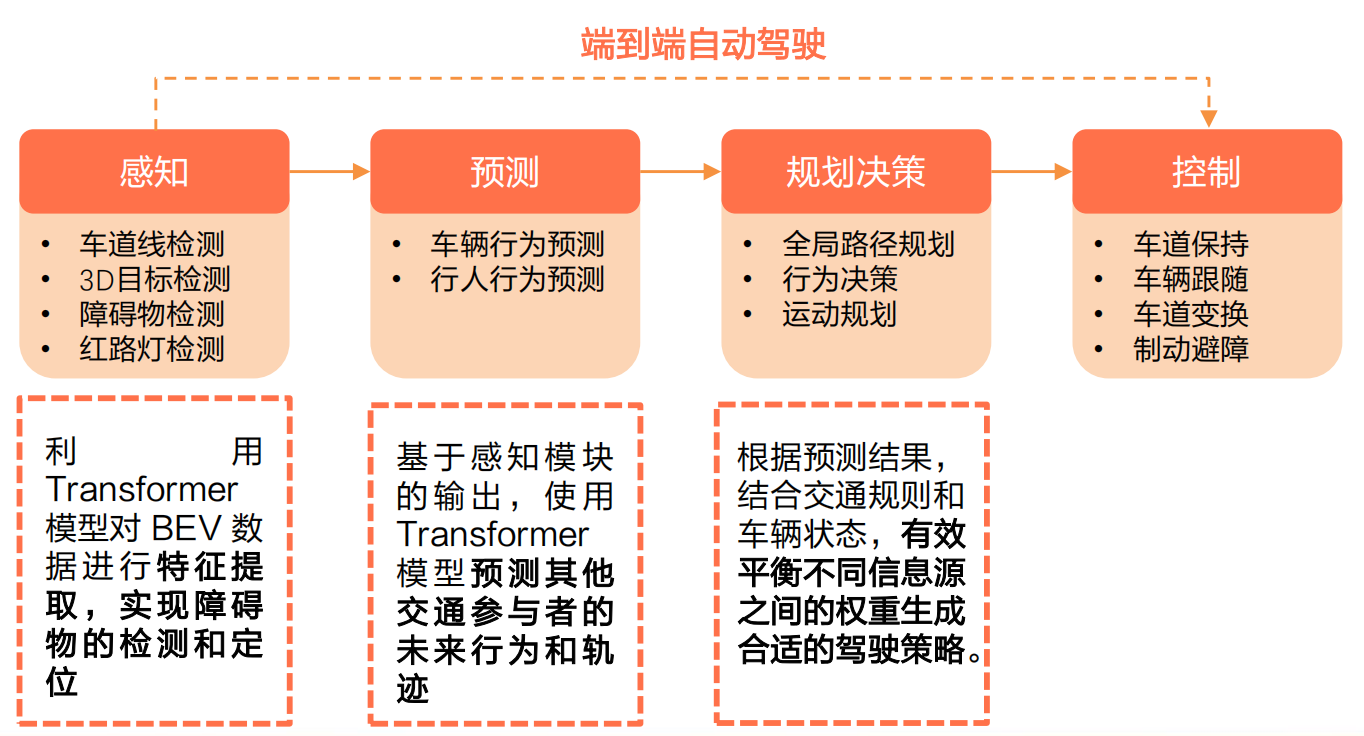
未来之路:大模型技术在自动驾驶的应用与影响
本文深入分析了大模型技术在自动驾驶领域的应用和影响,万字长文,慢慢观看~
文中首先概述了大模型技术的发展历程,自动驾驶模型的迭代路径,以及大模型在自动驾驶行业中的作用。接着,详细介绍了大模型的基本定义、基础功…
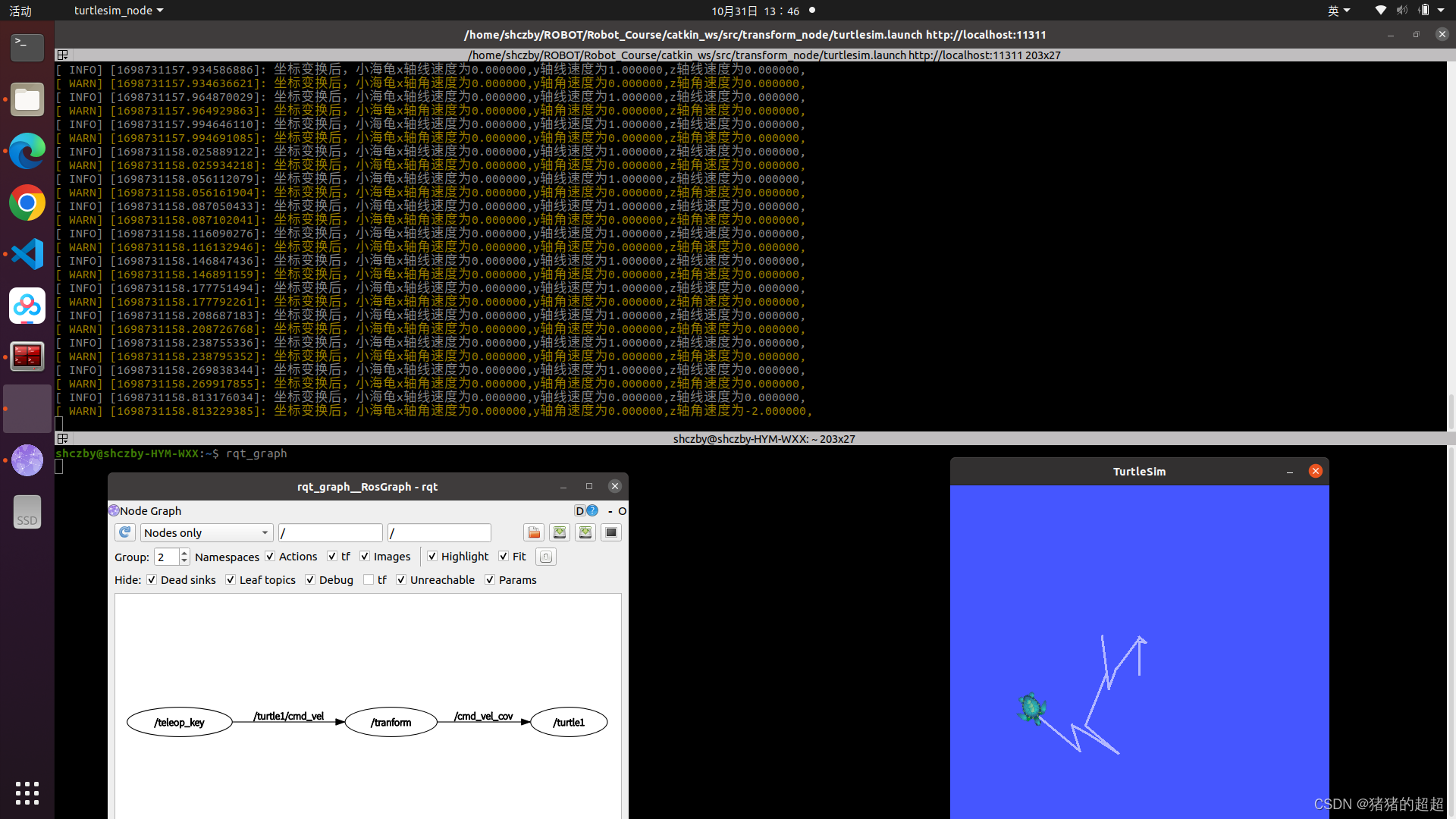
编程实现ROS话题通信——手撕 turtlesim 节点
一、实验任务 任务要求如下:使用 C 编程实现1个ROS节点,订阅 turtlesim 例程中 turtle_teleop_key 节点发出的消息,并将此消息进行一定的转换后(自行定义,如将数值按适当比例缩小、运动方向变换等)…
11月14日,每日信息差
今天是2023年11月14日,以下是为您准备的11条信息差
第一、中国航司首开“上海-开罗”往返直飞航线,12月11日首航
第二、中核集团:我国首次获得丰度99%以上的镱176同位素
第三、微软与谷歌将不会挑战欧盟的数据迁移法规,该法律将…
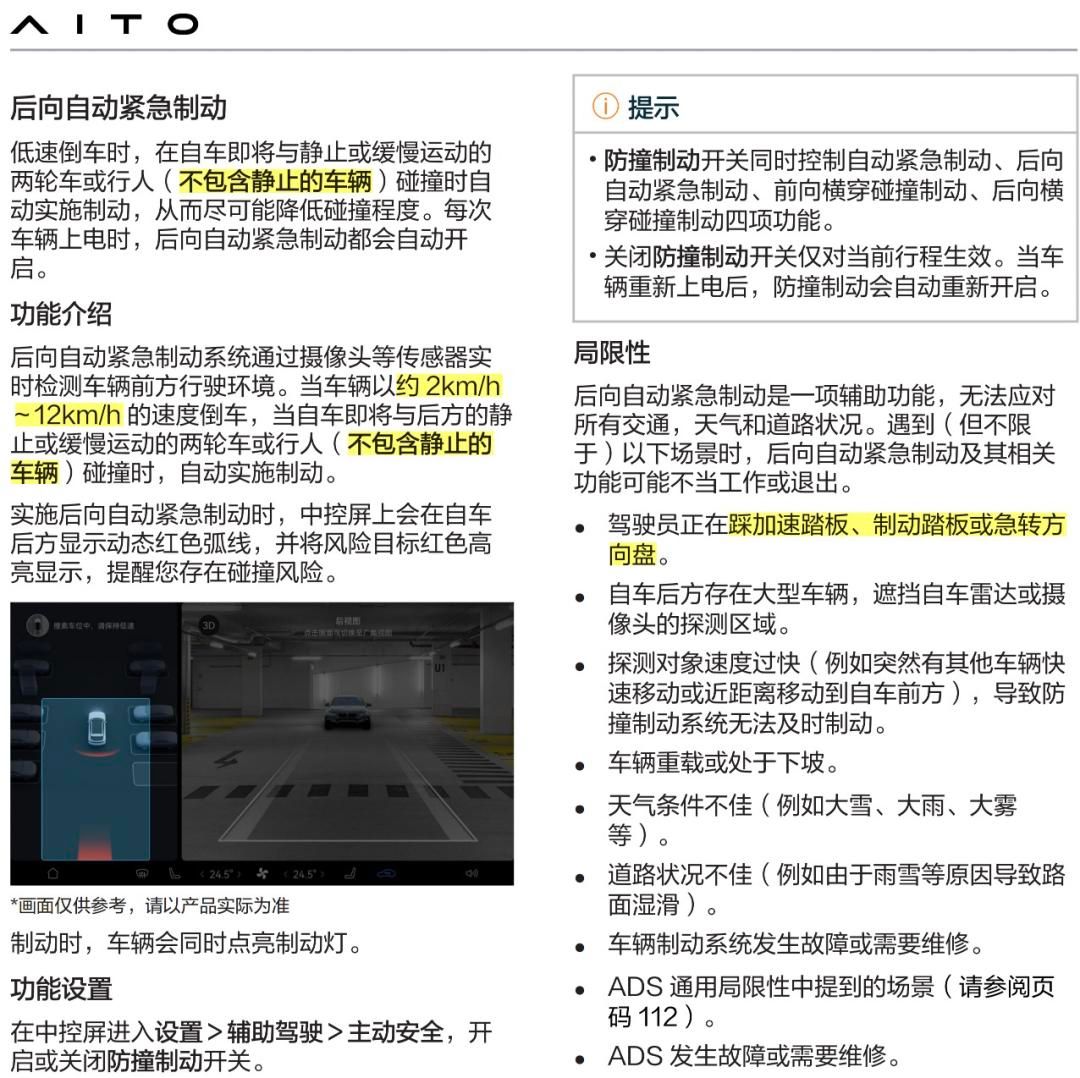
问界「力压」比亚迪,到底什么是RAEB?
作者 | Amy
编辑 | 德新 本周,一辆AITO问界M5智驾版「骑」上比亚迪海豚的视频引发热议。从视频推测,应该是M5在倒车过程中,猛地加速,一下冲到海豚车顶了。
这样富有戏剧性的视频,很快引爆了各大车友群。
不过在吃瓜…
Gazebo 从 Ignition 迁移指南
系列文章目录 文章目录 系列文章目录前言一、概览1.1 变化1.2 Tick-tocks and Hard-tocks1.3 Tick-tocks1.3.1 Namespaces(命名空间)1.3.2 Source(源文件)1.3.3 CMake and Packaging(CMake 和打包)1.3.4 Mi…
11.7 校招 实习 内推 面经
绿*泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、校招 | 小米集团2024届秋招汽车部热招岗位邀你来投(内推)
校招 | 小米集团2024届秋招汽车部热招岗位邀你来投(内推) 2、校招 | 山推工程机械…
ROS2 与 Gazebo 联合仿真项目模版
系列文章目录 文章目录 系列文章目录前言一、包含的软件包二、安装2.1 安装要求2.2 作为模板使用 三、用法3.1 安装依赖项3.2 构建项目3.3 source 工作空间3.4 启动仿真 四、详细用法4.1 软件包结构4.2 仿真资源配置 总结 前言
一个集成了 ROS 2 和 Gazebo 模拟器的模板项目。…

【ROS导航Navigation】五 | 导航相关的消息 | 地图 | 里程计 | 坐标变换 | 定位 | 目标点和路径规划 | 激光雷达 | 相机
致谢:ROS赵虚左老师
Introduction Autolabor-ROS机器人入门课程《ROS理论与实践》零基础教程
参考赵虚左老师的实战教程 一、地图
nav_msgs/MapMetaData
地图元数据,包括地图的宽度、高度、分辨率等。
nav_msgs/OccupancyGrid
地图栅格数据&#…
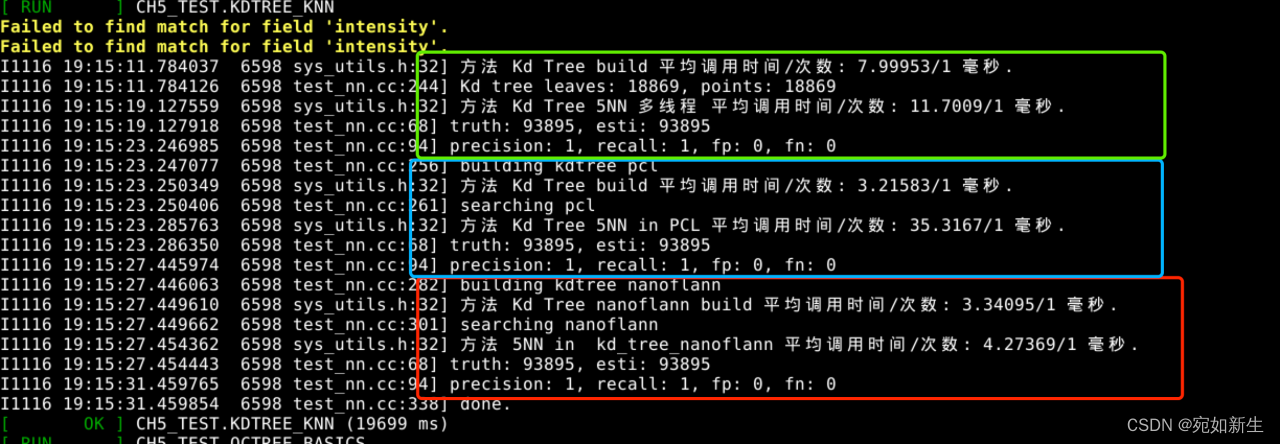
4. 【自动驾驶与机器人中的SLAM技术】点云中的拟合问题和K近邻
目录 1.在三维体素中定义 NEARBY14,实现 14 格最近邻的查找。2.推导arg max||Ad||22的解为ATA的最大特征向量或者奇异向量。3. 将本节的最近邻算法与一些常见的近似最近邻算法进行对比,比如nanoflann,给出精度指标和时间效率指标。4. 也欢迎大…
MATLAB 模糊设计器 构建 模糊系统
系列文章目录 文章目录 系列文章目录前言一、创建 FIS 结构二、定义输入变量三、定义输出变量四、定义成员函数五、定义规则库六、设计分析七、存储和修改设计八、导出 FIS总结 前言
本例演示如何使用 Fuzzy Logic Designer 应用程序交互式创建 1 型 Mamdani 模糊推理系统&…
辅助驾驶功能开发-功能对标篇(13)-NOA领航辅助系统-长安
1.横向对标参数 厂商长安车型阿维塔11上市时间2022Q3方案13V6R3L+1DMS摄像头前视摄像头4*(双目+长焦+广角)侧视摄像头4后视摄像头1环视摄像头4DMS摄像头1雷达毫米波雷达6(前+后+4角)4D毫米波雷达/超声波雷达12激光雷达3*(华为96线,1前2侧,905nm)域控供应商1*(华为MDC810)辅助…
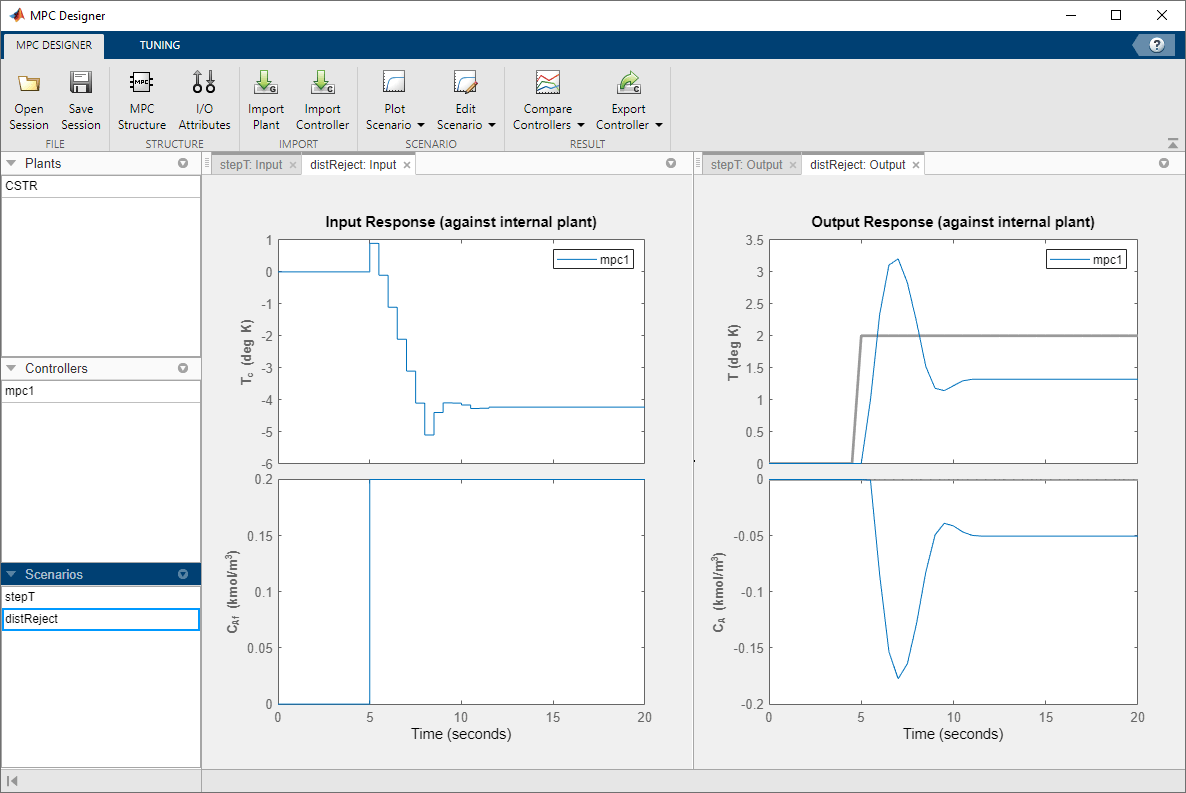
MATLAB 模型预测控制(MPC)控制入门 —— 设计并仿真 MPC 控制器
系列文章目录 文章目录 系列文章目录前言一、使用 MPC Designer 设计控制器1.1 CSTR 模型1.2 导入被控对象并定义 MPC 结构1.3 定义输入和输出通道属性1.4 配置仿真场景1.5 配置控制器水平线1.6 定义输入约束条件1.7 指定控制器调整权重1.8 消除输出超调1.9 测试控制器抗干扰能…
【MISRA C 2012】Rule 5.1 外部标识符应该是不同的
1. 规则1.1 原文1.2 分类 2. 关键描述3. 代码实例 1. 规则
1.1 原文
Rule 5.1 External identifiers shall be distinct Category Required Analysis Decidable, System Applies to C90, C99
1.2 分类
规则5.1:外部标识符应该是不同的 Required必须类规范。
2.…
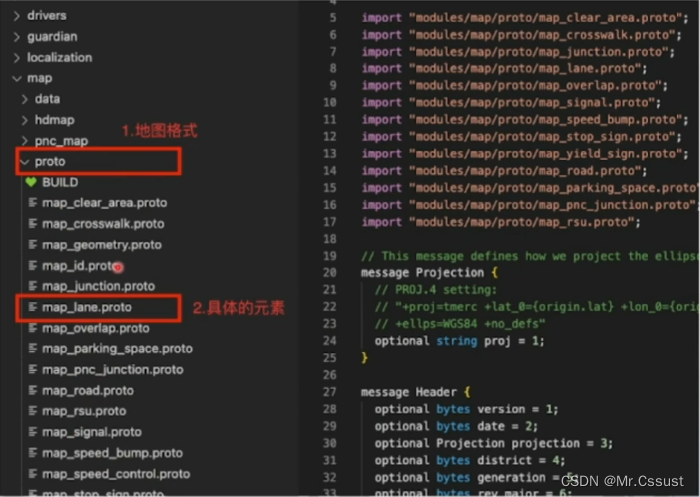
自动驾驶学习笔记(十一)——高精地图
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往: 《自动驾驶新人之旅》免费课程—> 传送门
《Apollo Beta宣讲和线下沙龙》免费报名—>传送门 文章目录
前言
高精地图
地图采集
底图制作
地图…
1.ORB-SLAM3中如何保存多地图、关键帧、地图点到二进制文件中
1 保存多地图
1.1 为什么保存(视觉)地图 因为我们要去做导航,导航需要先验地图。因此需要保存地图供导航使用,下面来为大家讲解如何保存多地图。 1.2 保存多地图的主函数SaveAtlas 2051 mStrSaveAtlasToFile是配置文件中传递的参数: 这里我们…

【论文速递】:老驾驶员轨迹数据中的异常行为检测
给定道路网络和一组轨迹数据,异常行为检测 (ABD) 问题是识别在行程中表现出明显方向偏差、急刹车和加速的驾驶员。ABD 问题在许多社会应用中都很重要,包括轻度认知障碍 (MCI) 检测和老年驾驶员的安全路线建…

Joern安装与使用
环境准备
Joern需要在Linux环境中运行,所以在Windows系统中需要借助WSL或虚拟机安装。
JDK安装
Joern的运行需要JAVA环境的支持,本次采用的是JDK17,其他版本建议看一下Joern官方文档。 apt install openjdk-17-jre-headless 配置JAVA环境变…

在CARLA中获取CARLA自动生成的全局路径规划
CARLA生成全局路径规划的代码在
carla/PythonAPI/carla/agents/navigation
在自己的carla客户端py文件中
from agents.navigation.basic_agent import BasicAgent # pylint: disableimport-error
如果是pycharm开发,要在pycharm的Settings - Project Structure…
使用 rosdep 管理 ROS 2 依赖项
系列文章目录 文章目录 系列文章目录前言 清华源镜像使用一、什么是 rosdep?二、关于 package.xml 文件的一些小知识三、rosdep 是如何工作的?四、如何知道在 package.xml 中输入哪些 key ?五、如何使用 rosdep 工具?5.1 rosdep 安…

原文远知行COO张力加盟逐际动力 自动驾驶进入视觉时代?
11月7日,通用足式机器人公司逐际动力LimX Dynamics官宣了两位核心成员的加入。原文远知行COO张力出任逐际动力联合创始人兼COO,香港大学长聘副教授潘佳博士为逐际动力首席科学家。
根据介绍,两位核心成员的加入,证明一家以技术驱…

智能座舱“卷“疯了!8295不再是最“亮”点,还需要这些顶级配置
前段时间,车圈被两款“极”字辈的新车刷屏:极越01和极氪001 FR。
前者可视作当前自主品牌车企高度智能化水平的“范式”,后者无疑是中国汽车品牌颠覆极限性能的代表作。
同时,这两款车将座舱配置作为卖点进行了详细推送…
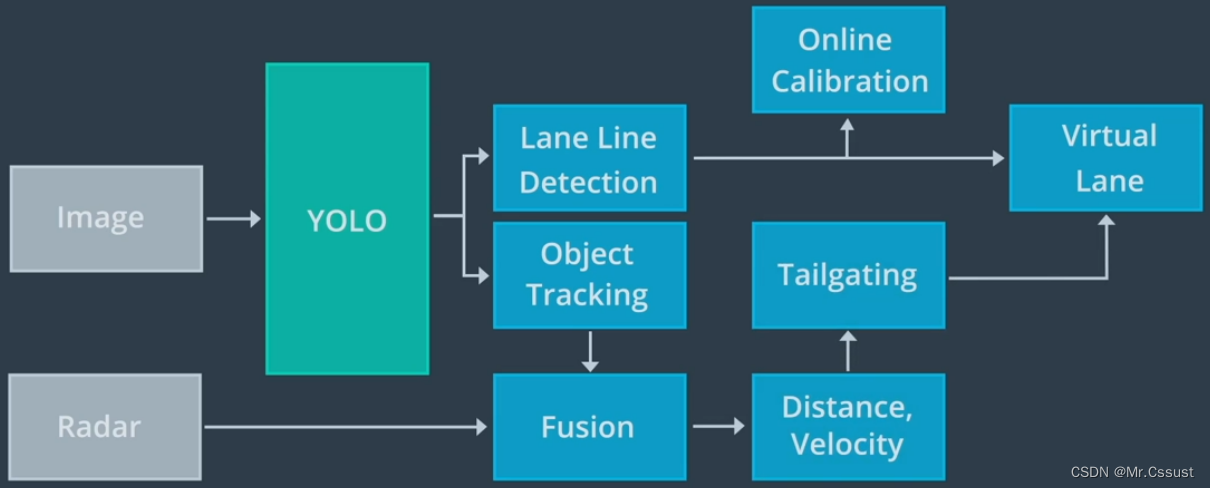
自动驾驶学习笔记(七)——感知融合
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往:
《自动驾驶新人之旅》免费课程—> 传送门
《Apollo Beta宣讲和线下沙龙》免费报名—>传送门 文章目录
前言
感知融合
卡尔曼滤波
融合策略
实…

中国毫米波雷达产业分析1——毫米波雷达行业概述
一、毫米波雷达简介 (一)产品定义 雷达是英文Radar的音译,源于Radio Detection and Ranging的缩写,原意是“无线电探测和测距”,即用无线电方法发现目标并测定它们在空间的位置。毫米波雷达是指一种工作在毫米波频段的…

自动驾驶学习笔记(九)——车辆控制
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往: 《自动驾驶新人之旅》免费课程—> 传送门
《Apollo Beta宣讲和线下沙龙》免费报名—>传送门 文章目录
前言
控制器设计
比例积分微分控制
线性…

4D毫米波雷达和3D雷达、激光雷达全面对比
众所周知,传统3D毫米波雷达存在如下性能缺陷: 1)静止目标和地物杂波混在一起,难以区分; 2) 横穿车辆和行人多普勒为零或很低,难以检测; 3) 高处物体和地面目标不能区分,容易造成误刹…
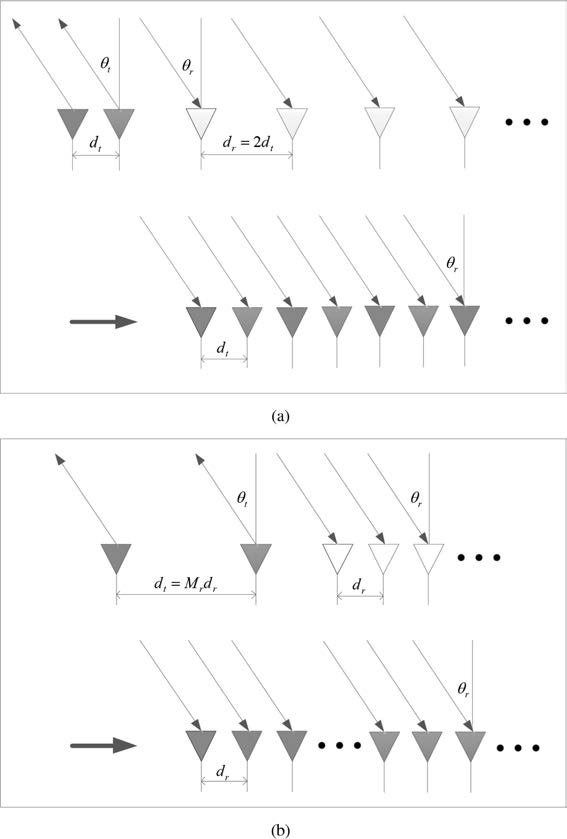
现代雷达车载应用——第3章 MIMO雷达技术 3.1节 基于MIMO雷达的虚拟阵列合成
经典著作,值得一读,英文原版下载链接【免费】ModernRadarforAutomotiveApplications资源-CSDN文库。
3 MIMO雷达技术 自20世纪90年代末以来,带有少量天线的汽车雷达已被用于高级驾驶员辅助系统(ADAS)的目的。这些早期的汽车雷达主要提供目标…
MATLAB - Gazebo 仿真环境
系列文章目录 前言
机器人系统工具箱(Robotics System Toolbox™)为使用 Gazebo 模拟器可视化的模拟环境提供了一个界面。通过 Gazebo,您可以在真实模拟的物理场景中使用机器人进行测试和实验,并获得高质量的图形。
Gazebo 可在…

【论文笔记】NeuRAD: Neural Rendering for Autonomous Driving
原文链接:https://arxiv.org/abs/2311.15260
1. 引言
神经辐射场(NeRF)应用在自动驾驶中,可以创建可编辑的场景数字克隆(可自由编辑视角和场景物体),以进行仿真。但目前的方法或者需要大量的训…
自动驾驶数据集waymo
目录
waymo-open-dataset-viewer
依赖项:
可视化参考: waymo-open-dataset-viewer
https://github.com/erksch/waymo-open-dataset-viewer/tree/master 依赖项:
# 安装 tensorflow (需要注意tensorflow与cuda版本对应&#…
JAVA实战演练之自动驾驶系统
一基本概念: 1. 传感器数据处理: 自动驾驶汽车需要收集大量的数据,包括来自雷达、激光雷达(LiDAR)、摄像头等传感器的数据。这些数据需要通过JAVA程序进行处理和解析,以便汽车能够理解其周围环境。 2. 控制算法: JAVA可…
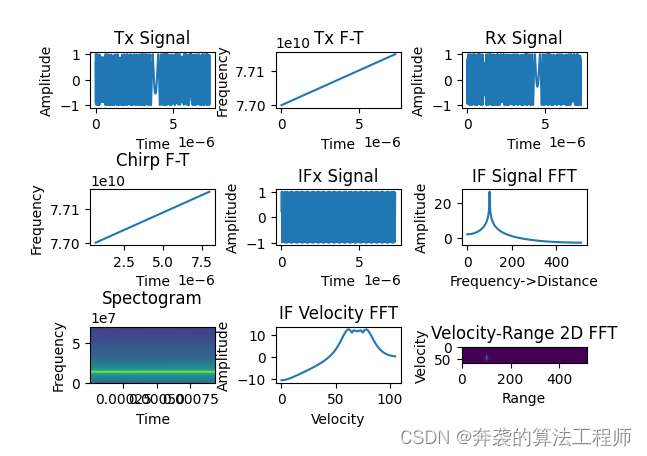
基于python的FMCW雷达工作原理仿真
这篇文章将介绍如何使用python来实现FMCW工作原理的仿真,第1章内容将介绍距离检测原理,第2章内容会介绍速度检测原理。
第1章
第1部分: 距离检测原理 调制的连续波雷达通常也被叫做调频连续波(FMCW)雷达是一个使用频率调制来测量…
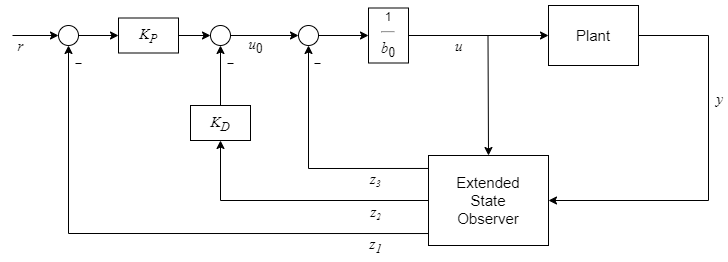
MATLAB 自抗扰控制 - Active Disturbance Rejection Control
系列文章目录
MATLAB 模型参考自适应控制 - Model Reference Adaptive Control 文章目录 系列文章目录前言一、控制器结构1.1 一阶逼近1.2 二阶逼近 二、指定控制器参数参考 前言
自抗扰控制 (ADRC) 是一种无模型控制方法,适用于为具有未知动态特性以及内部和外部…
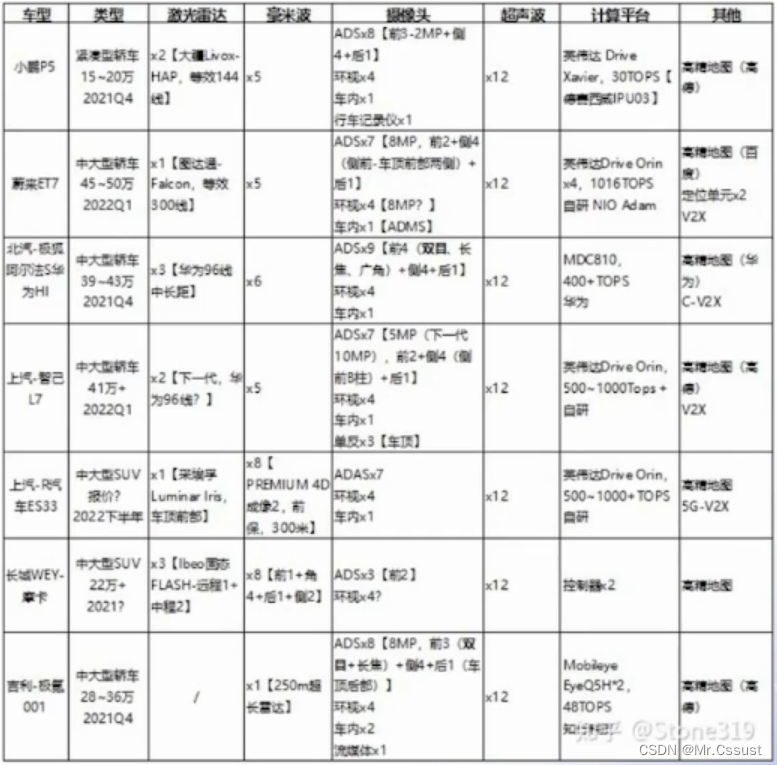
自动驾驶学习笔记(十三)——感知基础
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往: 《自动驾驶新人之旅》免费课程—> 传送门
《Apollo Beta宣讲和线下沙龙》免费报名—>传送门 文章目录
前言
传感器
测距原理
坐标系
标定
同…
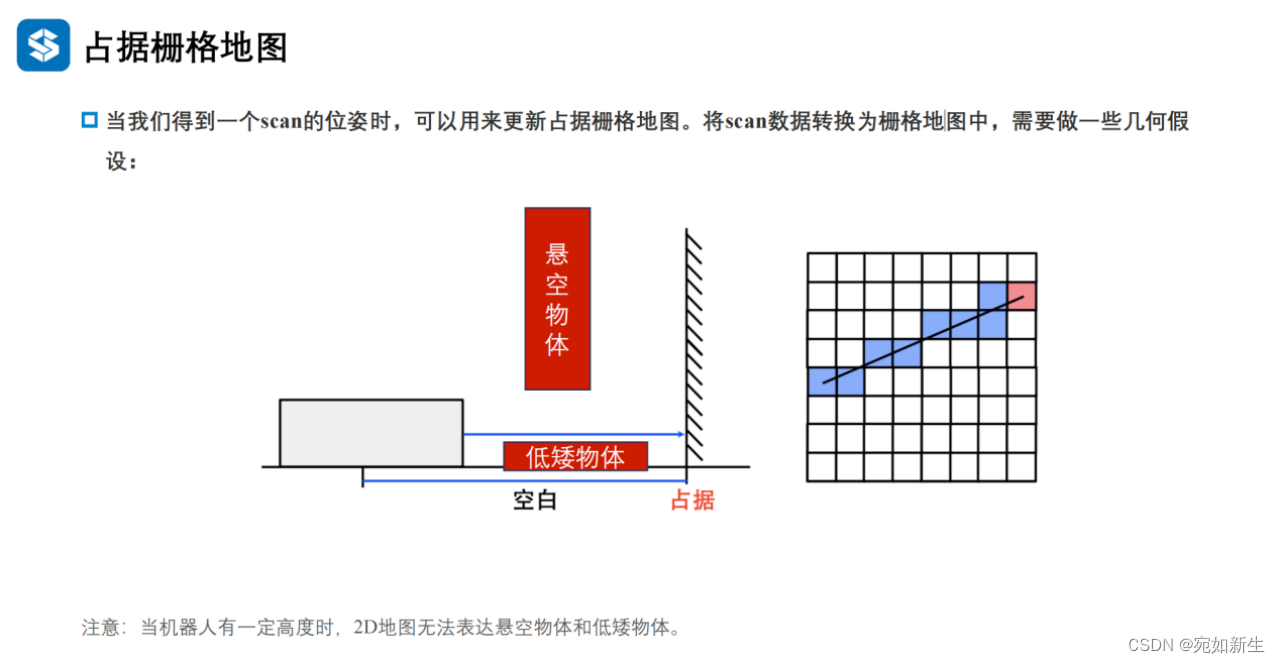
5.【自动驾驶与机器人中的SLAM技术】2D点云的scan matching算法 和 检测退化场景的思路
目录 1. 基于优化的点到点/线的配准2. 对似然场图像进行插值,提高匹配精度3. 对二维激光点云中会对SLAM功能产生退化场景的检测4. 在诸如扫地机器人等这样基于2D激光雷达导航的机器人,如何处理悬空/低矮物体5. 也欢迎大家来我的读书号--过千帆࿰…

参加百度Apollo技术沙龙—感受自动驾驶的魅力
2023年12月2日下午2点,我有幸参加了百度Apollo技术沙龙,这是一个围绕Apollo新版本Beta的全面升级展开的深度交流活动。作为一名工程师,我深感荣幸能够与众多同行和专家一同探讨自动驾驶技术的快速发展
在这次沙龙中,我了解到Apo…

Apollo新版本Beta自动驾驶技术沙龙参会体验有感—百度自动驾驶开源框架
在繁忙的都市生活中,我们时常对未来的科技发展充满了好奇和期待。而近日,我有幸参加了一场引领科技潮流的线下技术沙龙,主题便是探索自动驾驶的魅力——一个让我们身临其境感受创新、了解技术巨擘的机会。 在12月2日我有幸参加了Apollo新版本…
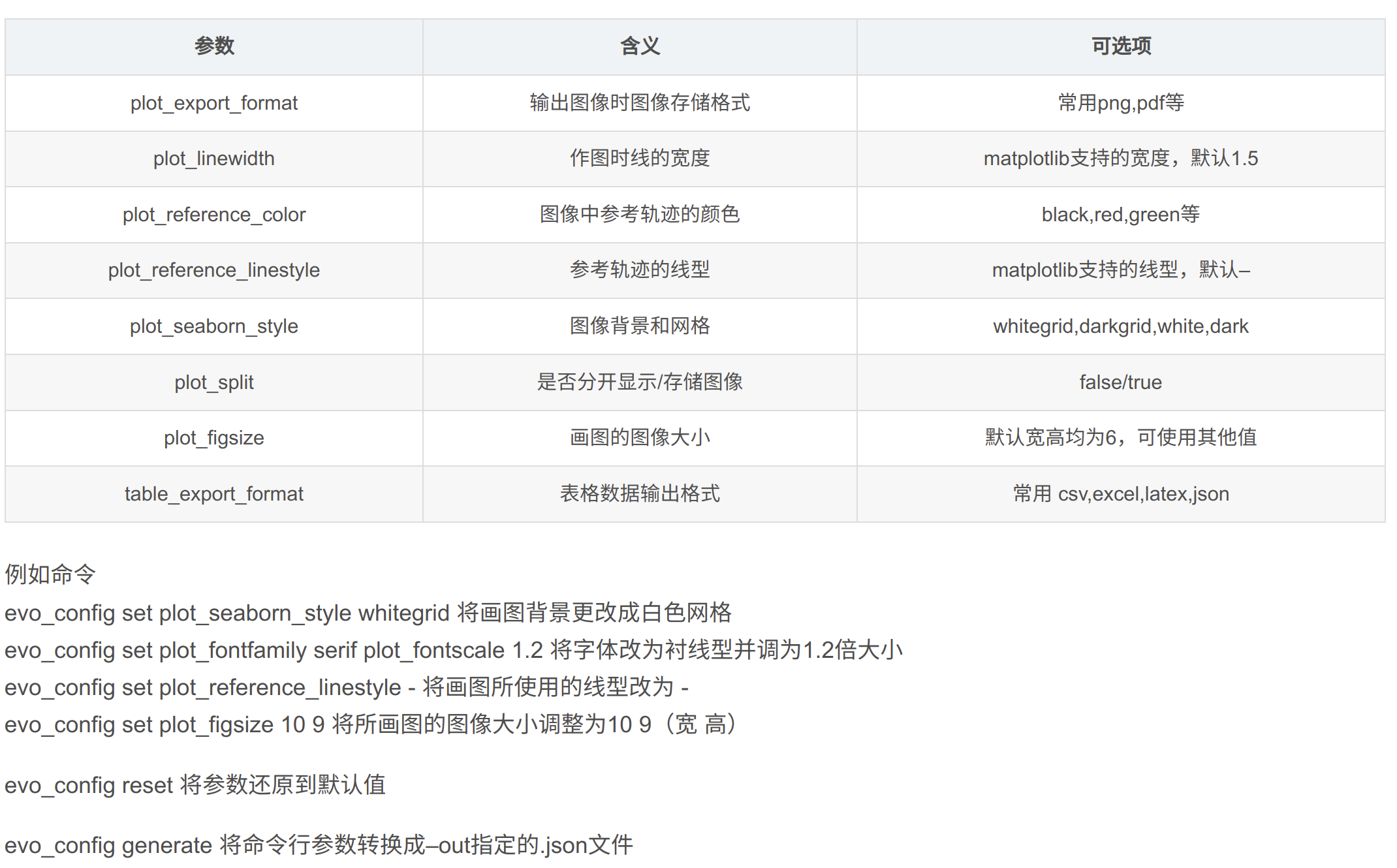
从零入门激光SLAM(十二)——evo工具箱
大家好呀,我是一个SLAM方向的在读博士,深知SLAM学习过程一路走来的坎坷,也十分感谢各位大佬的优质文章和源码。随着知识的越来越多,越来越细,我准备整理一个自己的激光SLAM学习笔记专栏,从0带大家快速上手激…
数据驱动与数据安全,自动驾驶看得见的门槛和看不见的天花板
作者 |田水
编辑 |德新
尽管心理有所准备,2023年智能驾驶赛道的内卷程度还是超出了大多数人的预期。
这一年,汽车价格战突然开打,主机厂将来自销售终端的价格压力,传导到下游智驾供应商,于是,市面上出现…

深度学习实战66-基于计算机视觉的自动驾驶技术,利用YOLOP模型实现车辆区域检测框、可行驶区域和车道线分割图
大家好,我是微学AI,今天给大家介绍一下深度学习实战66-基于计算机视觉的自动驾驶技术,利用YOLOP模型实现车辆区域检测框、可行驶区域和车道线分割图。本文我将介绍自动驾驶技术及其应用场景,并重点阐述了基于计算机视觉技术下的自动驾驶。自动驾驶技术是一种利用人工智能和…
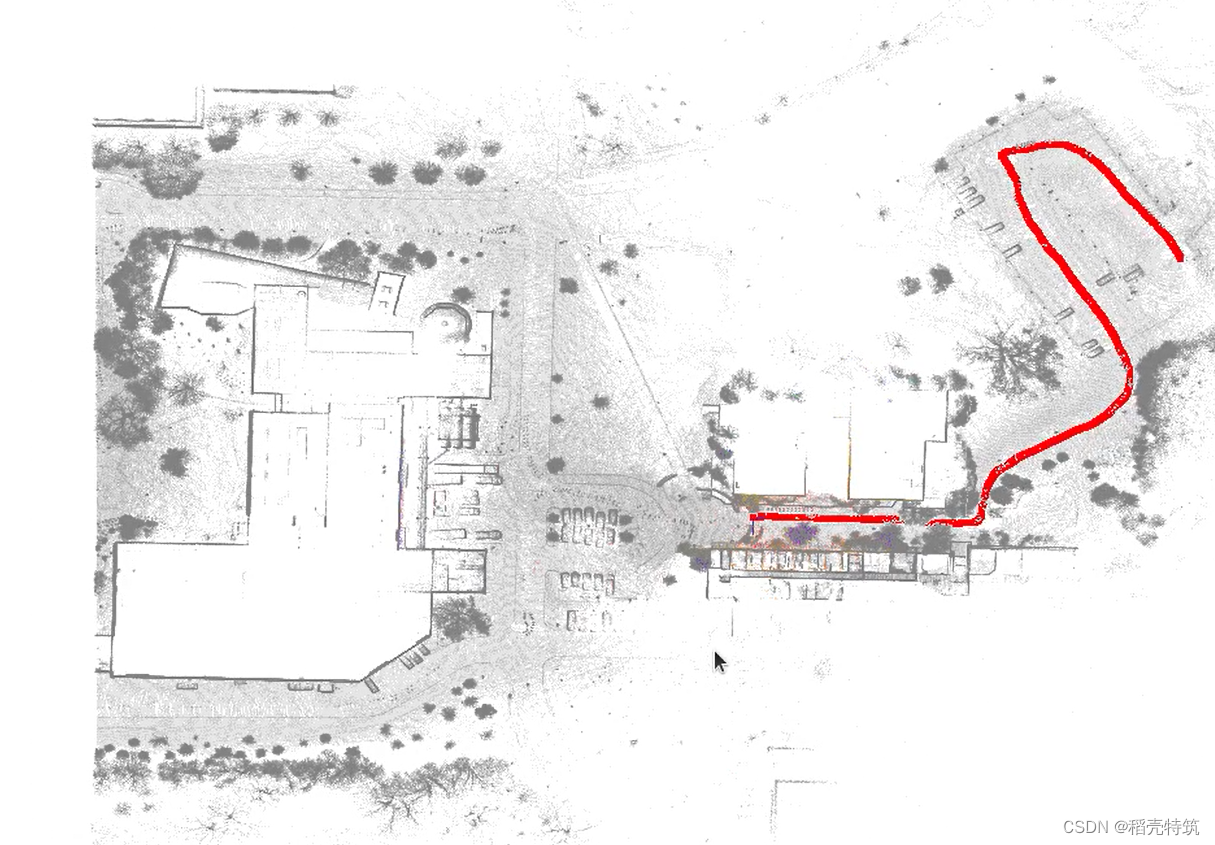
高翔《自动驾驶与机器人中的SLAM技术》第九、十章载入静态地图完成点云匹配重定位
修改mapping.yaml文件中bag_path: 完成之后会产生一系列的点云文件以及Keyframe.txt文件:
./bin/run_frontend --config_yaml ./config/mapping 生成拼接的点云地图map.pcd文件 :
./bin/dump_map --pose_sourcelidar 。、 完成第一次优…
mp4视频转rosbag文件(图片压缩、画面旋转、时间戳调整)
目录
目的
环境
主要步骤
创建py文件
执行py文件
效果
程序解释
画面旋转 时间戳调整 目的
将相机录制的mp4格式文件,转为ROS系统能使用的bag格式文件。
如果相机的画面不是正视的,会影响后续使用,需要旋转调整。
环境
安装有ROS…
11.16 校招 实习 内推 面经
绿*泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、校招|三一集团2024校招精选岗位补录,快上车!
校招|三一集团2024校招精选岗位补录,快上车! 2、校招丨寒武纪24届校招…
量产线控转向,特斯拉CyberTruck开起来是什么感觉?
作者 |Amy
编辑 |德新 近日,擎天柱机器人持汤姆逊冲锋枪测试Cybertruck防弹性能视频爆火。
虽然最后被证实视频是合成的,但是马斯克和众多外网博主也都测试了CyberTruck的防弹性能,看来不锈钢车身的确能扛得过子弹。
在持枪合法的国度&…
IEEE RAS 机器人最优控制(Model-based Optimization for Robotics)学习资料
系列文章目录 前言
电气和电子工程师学会机器人模型优化技术委员会 一、学习资料
1.1 教程和暑期学校
2020 年 Memmo 欧盟项目暑期班2019年Memmo欧盟项目冬季学校Matthias Gerdts(德国慕尼黑联邦国防军大学)在拜罗伊特 OMPC 2013 上举办的最优控制教程…

四. 基于环视Camera的BEV感知算法-BEVFormer
目标 前言0. 简述1. 算法动机&开创性思路2. 主体结构3. 损失函数4. 性能对比5. BEVFormerv2总结下载链接参考 前言 自动驾驶之心推出的《国内首个BVE感知全栈系列学习教程》,链接。记录下个人学习笔记,仅供自己参考 本次课程我们来学习下课程第四章—…

四. 基于环视Camera的BEV感知算法-环视背景介绍
目录 前言0. 简述1. 环视背景介绍2. 环视思路3. 主流基于环视Camera的算法详解总结下载链接参考 前言 自动驾驶之心推出的《国内首个BVE感知全栈系列学习教程》,链接。记录下个人学习笔记,仅供自己参考 本次课程我们来学习下课程第四章——基于环视Camer…
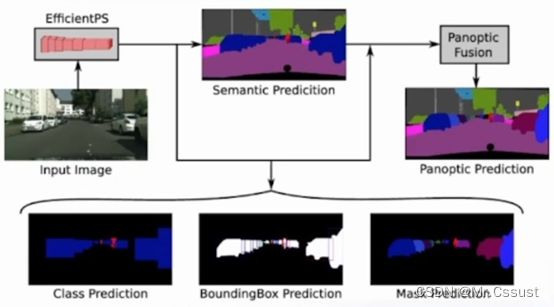
自动驾驶学习笔记(十七)——视觉感知
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往: 《自动驾驶新人之旅》免费课程—> 传送门
《Apollo 社区开发者圆桌会》免费报名—>传送门
文章目录
前言
分类
目标检测
语义分割
实例分割 …

灵活与高效的结合,CodeMeter Cloud Lite轻云锁解决方案
众多软件开发商日渐认识到,威步推出的一系列尖端软件产品在维护知识产权、精确控制及有效管理软件授权方面发挥着不可或缺的作用。这些产品的核心功能包括将许可证及其他关键敏感数据安全地存储于高端复杂的硬件设备、经过专业加密的文件,或者置于受严格…

如何通过球面投影(Spherical Projection)将点云转换为距离图像(Range Images)
前言
将3维激光点云通过球面投影(Spherical Projection)转换为2维距离图像(Range Images),是自动驾驶应用场景中一种非常常见的点云处理方式。点云转换为距离图像后,通常会被输入给一个2维卷积神经网络去实…
arXiv学术速递笔记12.8
文章目录 一、GSGFormer: Generative Social Graph Transformer for Multimodal Pedestrian Trajectory Prediction(GSGFormer:用于多通道行人轨迹预测的产生式社会图转换器)二、AnimateZero: Video Diffusion Models are Zero-Shot Image An…

基于VGG-16+Android+Python的智能车辆驾驶行为分析—深度学习算法应用(含全部工程源码)+数据集+模型(一)
目录 前言总体设计系统整体结构图系统流程图 运行环境Python环境TensorFlow 环境Pycharm 环境Android环境 相关其它博客工程源代码下载其它资料下载 前言
本项目采用VGG-16网络模型,使用Kaggle开源数据集,旨在提取图片中的用户特征,最终在移…
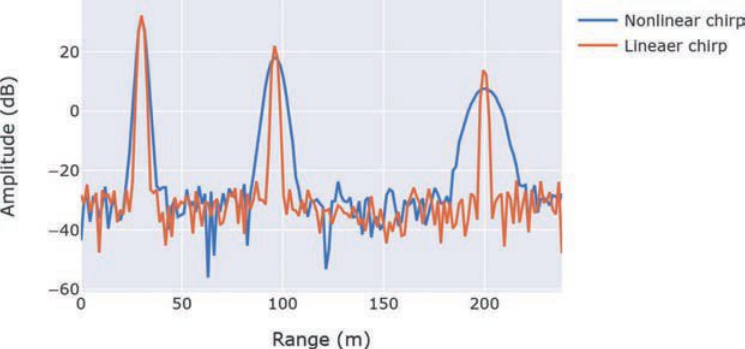
现代雷达车载应用——第2章 汽车雷达系统原理 2.6节 雷达设计考虑
经典著作,值得一读,英文原版下载链接【免费】ModernRadarforAutomotiveApplications资源-CSDN文库。
2.6 雷达设计考虑 上述部分给出了汽车雷达基本原理的简要概述。在雷达系统的设计中,有几个方面是必不可少的,它们决定了雷达系…

【送书活动】智能汽车、自动驾驶、车联网的发展趋势和关键技术
文章目录 前言01 《智能汽车》推荐语 02 《SoC底层软件低功耗系统设计与实现》推荐语 03 《SoC设计指南》推荐语 05 《智能汽车网络安全权威指南(上册)》推荐语 06 《智能汽车网络安全权威指南(下册)》推荐语 后记赠书活动 前言
…
PASCAL VOC 2012 数据集
PASCAL VOC 2012 数据集
(The PASCAL Visual Object Classes 2012,简称PASCAL VOC 2012数据集) 背景:PASCAL VOC (The PASCAL Visual Object Classes )是一个世界级的计算机视觉挑战赛,PASCAL全称…

Linux下I2C调试工具--for--Zynq MPSOC/Jetson Xavier
Linux下I2C调试工具
1、简介
i2c-tools是一个专门调试i2c的工具,无需编写任何代码即可轻松调试IC设备,可获取挂载的设备及设备地址,还可以在对应的设备指定寄存器设置值或者获取值等功能。i2c-tools有如下几个常用测试命令i2cdetect, i2cdu…
DRAKE - 基于模型的机器人设计与验证 由丰田研究所支持的 C++ / Python 工具箱。
系列文章目录 前言 - 概述 Drake(中古英语中的 "龙")是一个 C 工具箱,由麻省理工学院计算机科学与人工智能实验室(CSAIL)的机器人运动小组开发。目前,开发团队已大幅壮大,核心开发工作…
Pinocchio - 开源多刚体动力学 C++、Python库
系列文章目录 前言
Pinocchio 是一个用于动态计算的 C 库,侧重于机器人、计算机动画和生物力学应用。 它基于 Featherstone 在其著作中正式提出的动态多体计算。 该软件附带一个 python 封装和可视化工具。 一、库特征
实现了以下算法
递归牛顿-欧拉算法…
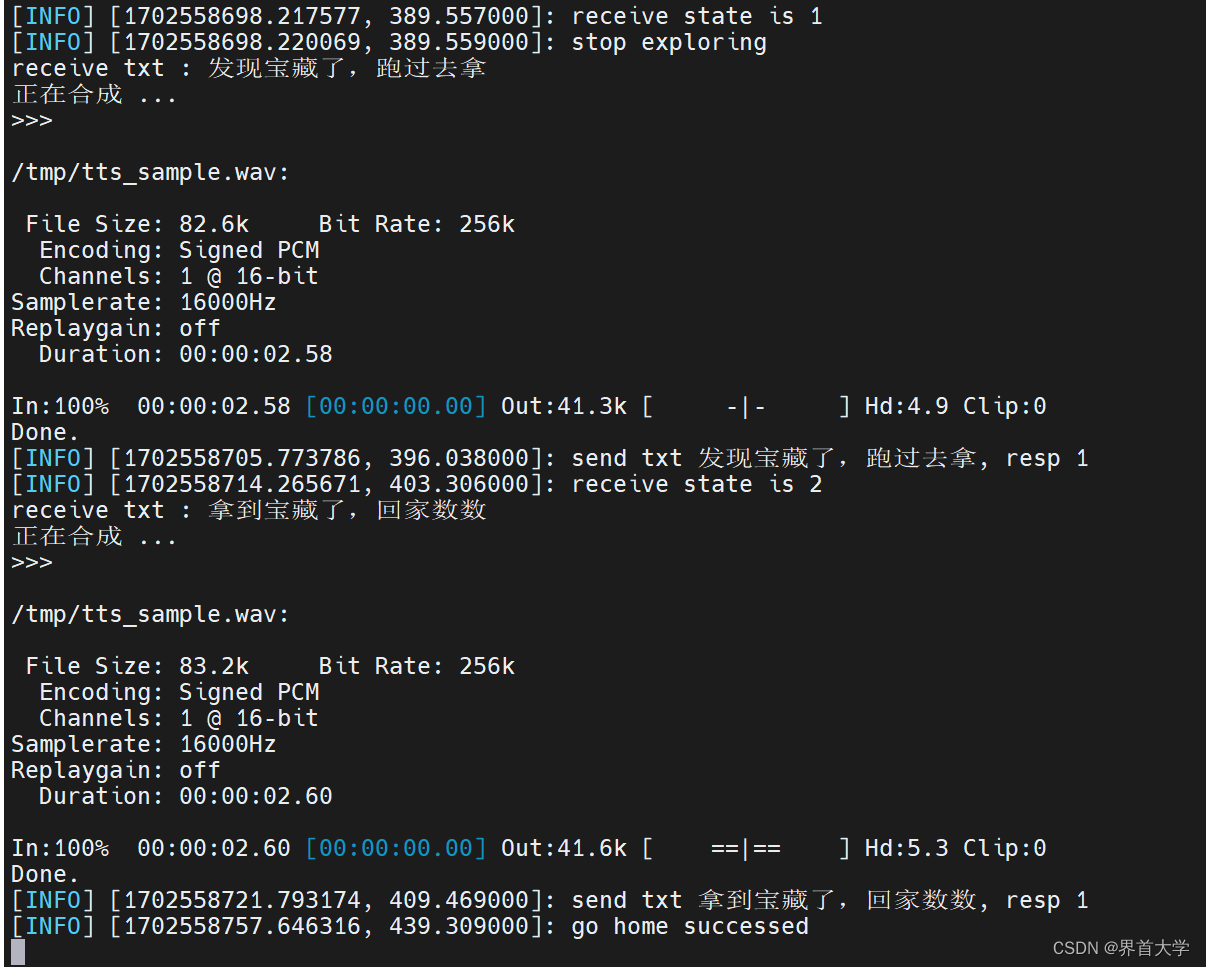
ROS高效进阶第七章 -- 机器人综合应用之迷宫寻宝
机器人综合应用之迷宫寻宝 1 背景和资料2 正文2.1 作业引入和解题思路2.2 robot_hunt_maze 3 总结 1 背景和资料
本文是机器人高效进阶系列的收尾篇,我们将综合运用前面所学,完成机器人迷宫寻宝的作业。 本文参考资料: (1&#x…
人工智能深度学习:探索智能的深邃奥秘
导言 人工智能深度学习作为当今科技领域的明星,正引领着智能时代的浪潮。深度学习和机器学习作为人工智能领域的两大支柱,它们之间的关系既有协同合作,又存在着显著的区别。本文将深入研究深度学习在人工智能领域的角色,以及其在各…

ros2 工作区介绍 、ros2 包介绍及实操
工作区介绍 ROS工作空间是具有特定结构的目录。通常有一个src子目录。该子目录内是 ROS 包的源代码所在的位置。通常该目录一开始是空的。其工作区在src同级目录下。
colcon 不进行源代码构建。默认情况下,它将创建以下目录作为该src目录的同级目录: 该…

重新定义出行,PIX移动空间-Robobus2.0正式发布
PIX从创始之初就以重塑城市作为愿景,基于对未来终局的思考,我们重新定义了下一代汽车–移动空间,汽车不再只是一个交通工具,而是一个个提供服务的移动空间,这也将最终重塑城市,使城市成为一个真正的超级有机…
OCS2 入门教程(三)- 最优控制模块
系列文章目录 前言 在本页中,我们将为您提供如何定义 MPC 问题的一些提示。在 OCS2 中,OptimalControlProblem 结构定义了优化问题的主要组成部分,即动力学、成本和约束条件。 除此之外,您可能还希望为 MPC 提供一些参考轨迹、预定…
TC397 EB MCAL开发从0开始系列 之 [13.1] Dma配置 -实现M2M数据传输(读存储写存储)
一、Dma配置1、配置目标2、目标依赖2.1 硬件使用2.2 软件使用2.3 新增模块3、EB配置3.1 配置讲解3.2 模块配置3.2.1 MCU配置3.2.2 PORT配置3.2.3 Dma配置3.2.5 Irq配置3.2.6 ResourceM配置4、ADS代码编写及调试4.1 工程编译4.2 测试结果4.3 测例源码->
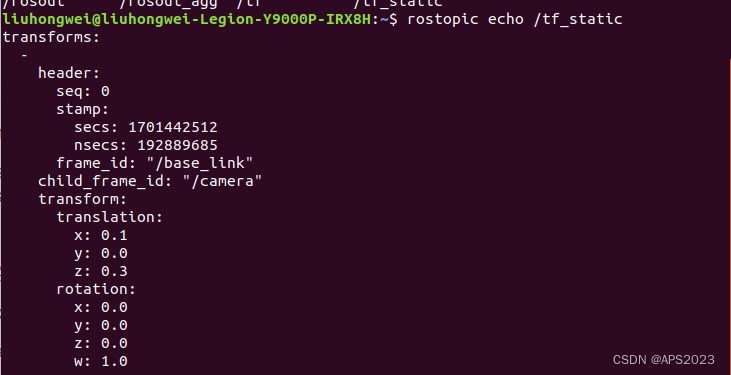
7.ROS的TF坐标变换(一):TF简介及静态坐标变换代码讲解
目录
1 什么是ROS的TF坐标变换TransForm Frame
2 坐标变换的msg信息geometry_msgs/TransformStamped与geometry_msgs/PointStamped
3 静态坐标变换
3.1 C clion实现静态坐标变换
3.1.1 CMakeLists.txt配置
3.1.2 package.xml配置
3.1.3 发布节点建立
3.1.4 接收节点建立…
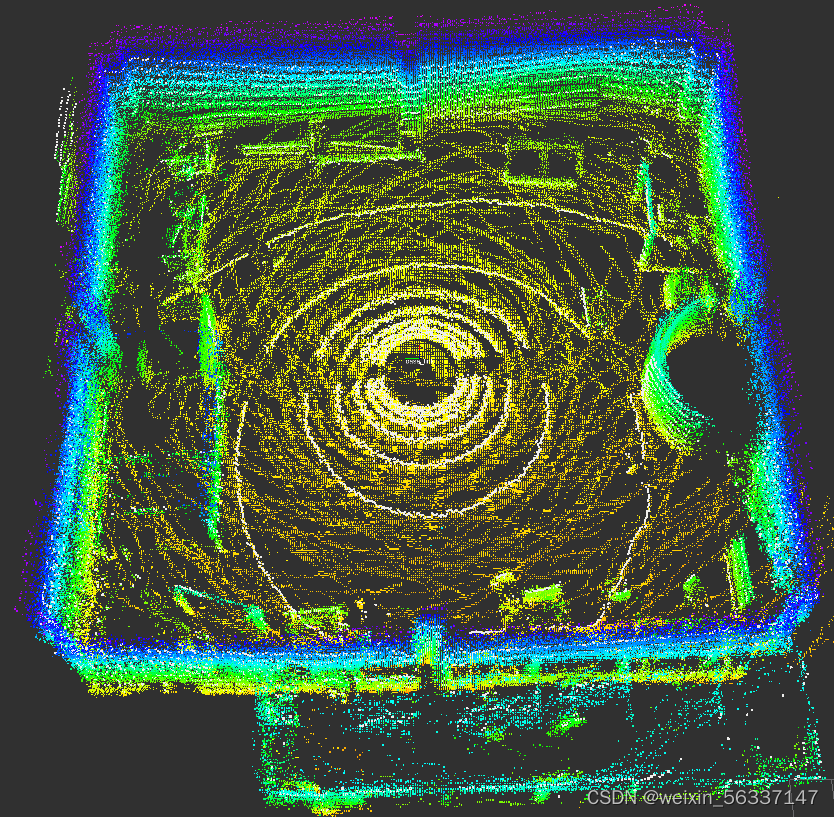
DLL(直接激光雷达定位)编译运行过程记录
文章:DLL: Direct LIDAR Localization. A map-based localization approach for aerial robots
代码:https://github.com/robotics-upo/dll
GitHub - robotics-upo/dll: DLL: Direct Lidar Localization
下载安装DLL
在GitHub网站下载再手动解压、复…
11.14 校招 实习 内推 面经
绿*泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、校招丨寒武纪24届校招重点岗位推介-软件类(内推)
校招丨寒武纪24届校招重点岗位推介-软件类(内推) 2、校招丨传音控股2024届秋招这些岗位还…

Apollo自动驾驶:新一代智能交通革命的引擎
前言 「作者主页」:雪碧有白泡泡 「个人网站」:雪碧的个人网站
ChatGPT体验地址 文章目录 前言1. 单元测试基础2. 集成测试指南3. 持续集成与自动化测试结论 🔧🧪 工程化测试:Apollo的单元测试与集成测试指南 &#…
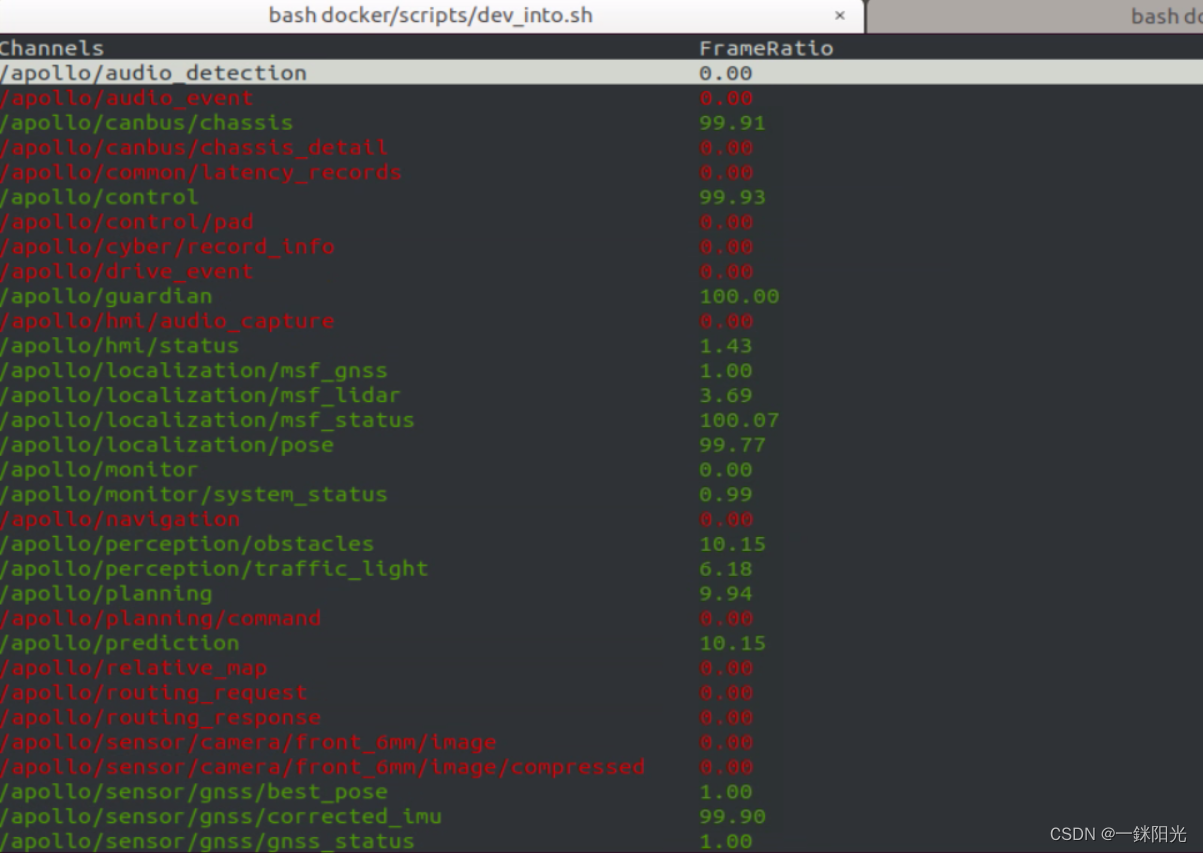
自动驾驶apollo9.0 Dreamview Debug方法
Apollo 9.0
安装&编译方法
# 拉取源码
git clone gitgithub.com:ApolloAuto/apollo.git
git checkout v9.0.0# 启动docker
bash docker/scripts/dev_start.sh
bash docker/scripts/dev_into.sh# 编译project
./apollo.sh build默认启动方式
default mode
wget https:…
【三维目标检测】【自动驾驶】IA-BEV:基于结构先验和自增强学习的实例感知三维目标检测(AAAI 2024)
系列文章目录
论文:Instance-aware Multi-Camera 3D Object Detection with Structural Priors Mining and Self-Boosting Learning 地址:https://arxiv.org/pdf/2312.08004.pdf 来源:复旦大学 英特尔Shanghai Key Lab /美团 文章目录 系列文…
Windows11 - Ubuntu 双系统及 ROS、ROS2 安装
系列文章目录 前言 一、Windows11 - Ubuntu 双系统安装
硬件信息:
设备名称 DESKTOP-B62D6KE
处理器 13th Gen Intel(R) Core(TM) i5-13500H 2.60 GHz
机带 RAM 40.0 GB (39.8 GB 可用)
设备 ID 7673EF86-8370-41D0-8831-84926668C05A
产品 ID 00331-10000-0000…

首次落地零担快运!商用车自动驾驶跑出交付加速度
即将迈入2024年,还活着的自动驾驶玩家,身上有两个显著标签:选对了细分赛道、会玩。
10月以来,Cruise宣布在美国德州奥斯汀、休斯顿、亚利桑那州凤凰城和加州旧金山全面停止所有自动驾驶出租车队运营服务,通用汽车计划…
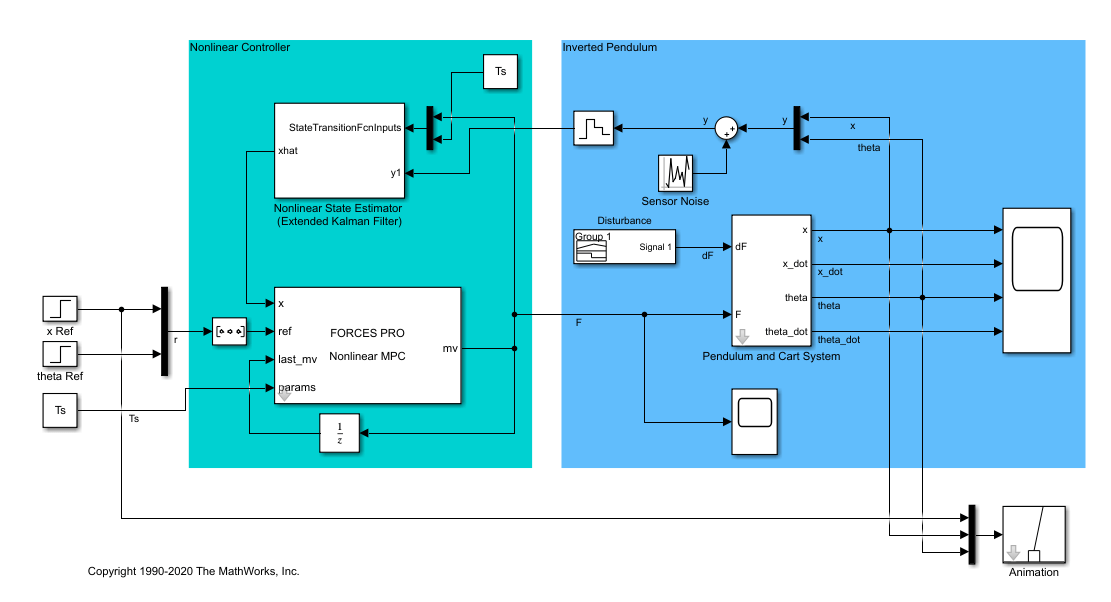
一级倒立摆控制 - 非线性 MPC 控制及 MATLAB 实现
系列文章目录 前言
本示例使用非线性模型预测控制器对象和块实现对小车上倒立摆的摆动和平衡控制。
本示例需要 Optimization Toolbox™ 软件为非线性 MPC 提供默认的非线性编程求解器,以计算每个控制间隔的最优控制动作。 一、摆锤/小车装配
本例中的被控对象是…

单目测距(车辆测距+前车碰撞预警)-基于yolov8/yolov7/yolov5——毕业设计
一、开发环境 部署平台:英伟达的Jetson Nano 环境:Linux ROS 语言:C 设备:1920*1080像素的摄像头、开发板。 模型:yolo-v8s
二、单目测距实现思路 0、标定相机和车辆(假设已经标定完成) 1、通…
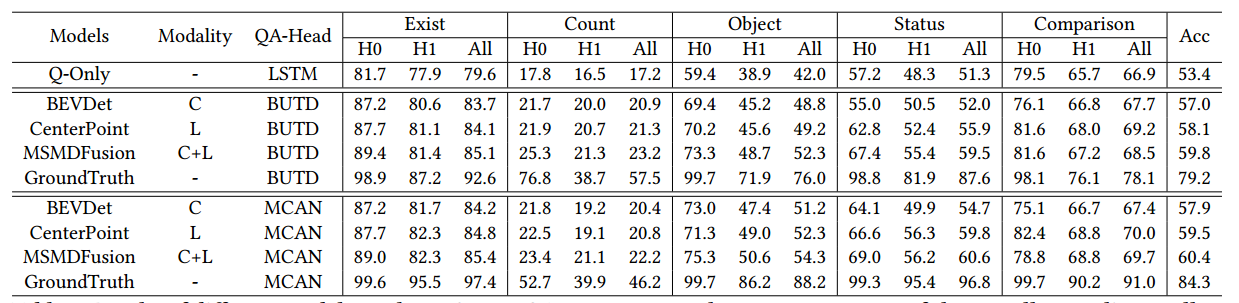
【论文解读】NuScenes-QA:自动驾驶场景的多模态视觉问答基准
来源:投稿 作者:橡皮 编辑:学姐 论文链接:https://arxiv.org/pdf/2305.14836.pdf
开源代码:https://github.com/qiantianwen/NuScenes-QA
摘要:
我们在自动驾驶背景下引入了一种新颖的视觉问答…
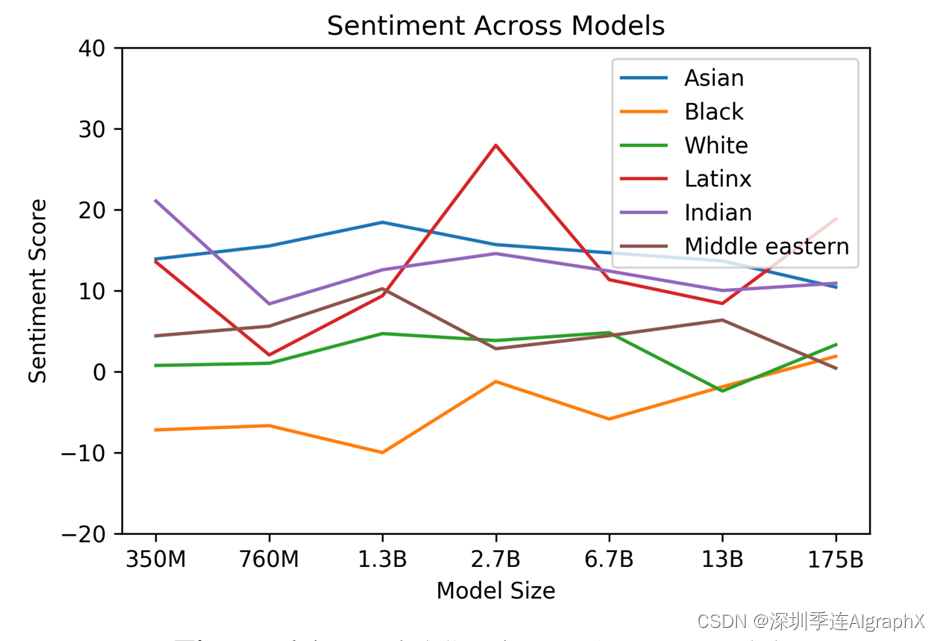
51-8 GPT,GPT2,GPT3 论文精读
2020年的时候有一篇博客冲到了Hack News的第一名。Hack News是在技术圈里面应该是影响力最大的一个新闻汇聚网站,所有人都可以分享自己喜欢的文章,然后观众对这些文章进行点赞或者是评论。Hack News根据你点赞的个数和评论来进行排名,这篇文章…
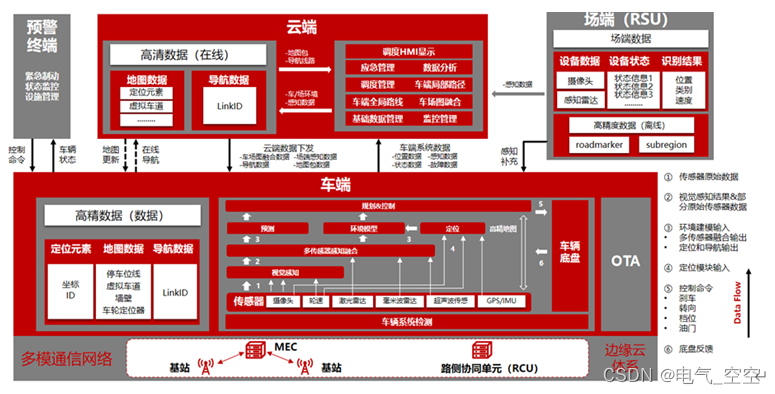
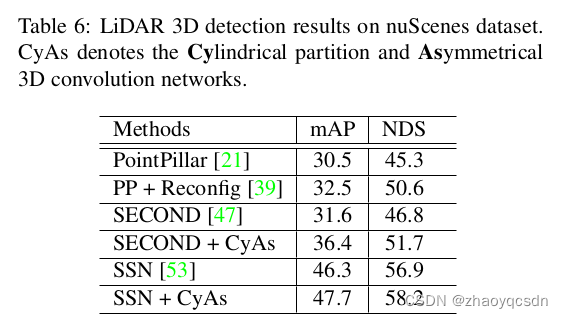
Cylinder3D论文阅读
Cylindrical and Asymmetrical 3D Convolution Networks for LiDAR Segmentation(2020年论文) 作者:香港中文大学 论文链接:https://arxiv.org/pdf/2011.10033.pdf 代码链接:https://github.com/xinge008/Cylinder3D
…
MATLAB - 四旋翼飞行器动力学方程
系列文章目录 前言
本例演示了如何使用 Symbolic Math Toolbox™(符号数学工具箱)推导四旋翼飞行器的连续时间非线性模型。具体来说,本例讨论了 getQuadrotorDynamicsAndJacobian 脚本,该脚本可生成四旋翼状态函数及其雅各布函数…
![[自动驾驶算法][从0开始轨迹预测]:一、坐标和坐标系变换](https://img-blog.csdnimg.cn/direct/7925a7eeda9743c39eea9656e0494a25.png#pic_center)
[自动驾驶算法][从0开始轨迹预测]:一、坐标和坐标系变换
既然要从0开始轨迹预测,那从哪开始写起呢?回想下自己的学习历程,真正有挑战性的不是模型结构,不是繁琐的训练和调参,而是数据的制作!!! 笔者自认为不是一个数学基础牢固的人…

自动驾驶二维激光雷达标定板
自动驾驶是人类智慧的结晶,它融合了多种高科技技术,包括传感器技术、计算机视觉、人工智能等,它让汽车具备了自主感知和决策的能力,可以在复杂多变的道路环境中自如应对。这种技术带给我们的不仅仅是出行的便利,更是对…

python对自动驾驶进行模拟
使用了 Pygame 库来创建一个简单的游戏环境,模拟了一辆自动驾驶汽车在道路上行驶。汽车的位置和速度通过键盘控制,可以左右移动和加速减速。道路的宽度和颜色可以根据需要进行调整。 import pygame
import random
# 游戏窗口大小
WINDOW_WIDTH 800
WINDOW_HEIG…
自动驾驶车辆运动规划方法综述 - 论文阅读
本文旨在对自己的研究方向做一些记录,方便日后自己回顾。论文里面有关其他方向的讲解读者自行阅读。 参考论文:自动驾驶车辆运动规划方法综述
1 摘要
规划决策模块中的运动规划环节负责生成车辆的局部运动轨迹 ,决定车辆行驶质量的决定因素…

万字长文谈自动驾驶bev感知(一)
文章目录 prologuepaper listcamera bev :1. Lift, Splat, Shoot: Encoding Images from Arbitrary Camera Rigs by Implicitly Unprojecting to 3D2. M2BEV: Multi-Camera Joint 3D Detection and Segmentation with Unified Birds-Eye View Representation3. BEVDet: High-Pe…
自动驾驶 | 决策规划岗位校招面试中常见的数学方法整理
文章目录 前言计算几何学求解方程的根无约束优化——求解函数极值 前言
前段时间,我mentor面试了一个决策规划方向实习的候选人,这个候选人是我母校的学生,算是我的学弟,跟我一个专业,他的老师是我学院的院长…
规则与不规则的凸多边形IoU计算
在视觉中可能比较多的是计算规则凸四边形,而在少部分视觉,大部分现实中的多边形可能是不规则的,这个时候如果用规则的方法计算,可能会引入很多bug。在自动驾驶中不规则的凸多边形计算非常常见。
IoU= 交集 / 并集=inner_area / (area1 + area2 - inner_area)
1.规则凸四边…

与「高通」最像的芯片公司出道,杀入主流智驾芯片市场
作者 |德新
编辑 |王博 单芯片全时行泊一体 上个月,AI芯片研发及基础算力平台公司爱芯元智推出面向车载智能驾驶领域的品牌「爱芯元速」。这意味着这家创办四年多,累计融资近20亿元的芯片公司正式进军车载市场。
实际上,爱芯元速序列的第一…
现代雷达车载应用——第2章 汽车雷达系统原理 2.5节 检测基础
经典著作,值得一读,英文原版下载链接【免费】ModernRadarforAutomotiveApplications资源-CSDN文库。
2.5 检测基础 对于要测试目标是否存在的雷达测量,可以假定下列两个假设之一为真: •H0:—测量结果仅为噪声。 •H1:—测量是噪…
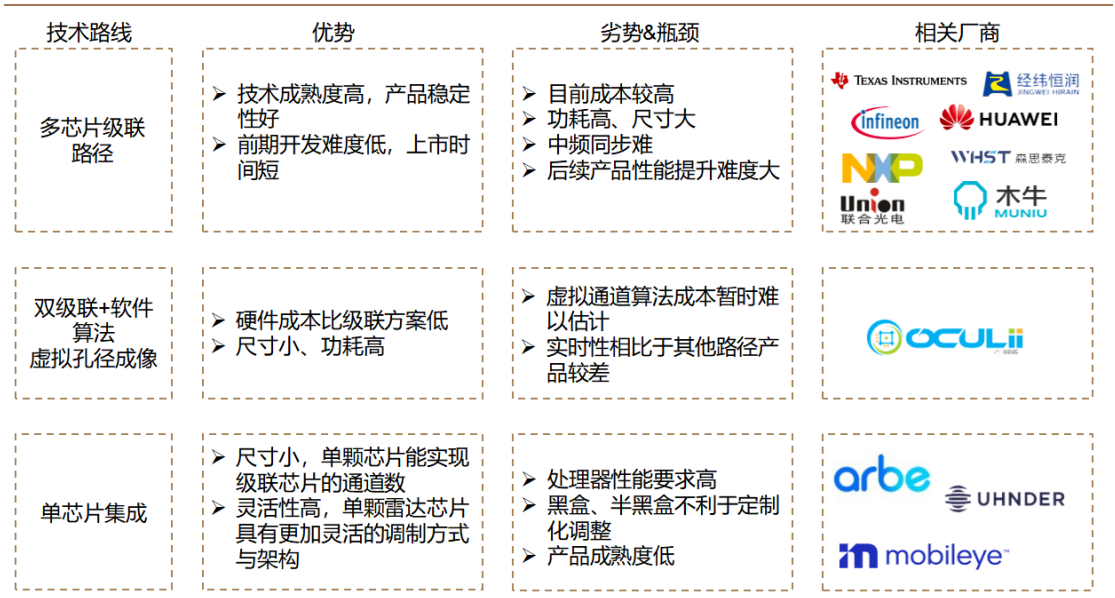
毫米波雷达:从 3D 走向 4D
1 毫米波雷达已广泛应用于汽车 ADAS 系统 汽车智能驾驶需要感知层、决策层、执行层三大核心系统的高效配合,其中感知层通过传感器探知周围的环境。汽车智能驾驶感知层将真实世界的视觉、物理、事件等信息转变成数字信号,为车辆了解周边环境、制定驾驶操…
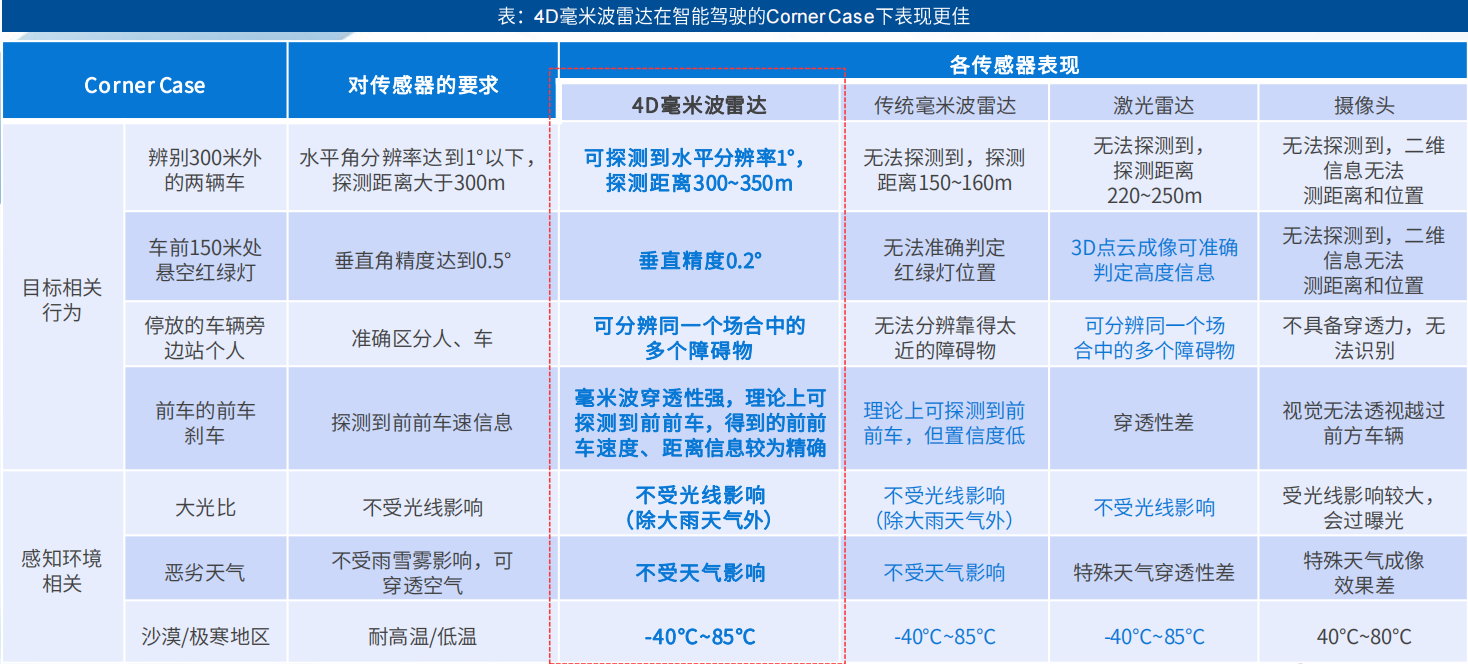
车载毫米波雷达及芯片新趋势研究2--“CMOS+AiP+SoC”与4D毫米波雷达推动产业越过大规模发展临界点
2.1 MMIC芯片工艺发展至CMOS时代,芯片集成度更高、体积与成本下降 MMIC芯片工艺经GaAs、SiGe已发展至CMOS时代,CMOS MMIC具有更低成本、更高集成度的优势。 工艺的主要变化发生在MMIC芯片的射频材料部分,目前SiGe仍为主流工艺。 SiGe虽在…
自动驾驶代客泊车AVP巡航规划详细设计
目 录
巡航规划详细设计... 1
修改记录... 2
目 录... 3
1 背景... 5
2 系统环境... 6
2.1 巡航规划与其它模块联系... 6
2.2 巡航规划接口说明... 6
3 规划模块设计... 9
3.1 巡航规划架构图... 9
3.2 预处理... 10
3.3 Planner. 10
3.3.1 Geometry planner. 10
…
【algorithm】自动驾驶常见常考的几个模型和推导,顺便总结自己遇到的考题经验不断更新之———控制版
写在前面
本来快达成目标了,没想到公司遭受了问题,公司和同事我感觉还是挺好的,有国企的正规也有小企业的灵活,大家都很有学习欲望。 作为本次再次复习回忆如下: 把之前面试准备的 机器学习(基本搬运到CSD…
51-11 多模态论文串讲—VLMo 论文精读
VLMo: Unified Vision-Language Pre-Training with Mixture-of-Modality-Experts (NeurIPS 2022)
VLMo 是一种多模态 Transformer 模型,从名字可以看得出来它是一种 Mixture-of-Modality-Experts (MoME),即混合多模态专家。怎么理解呢?主流 …
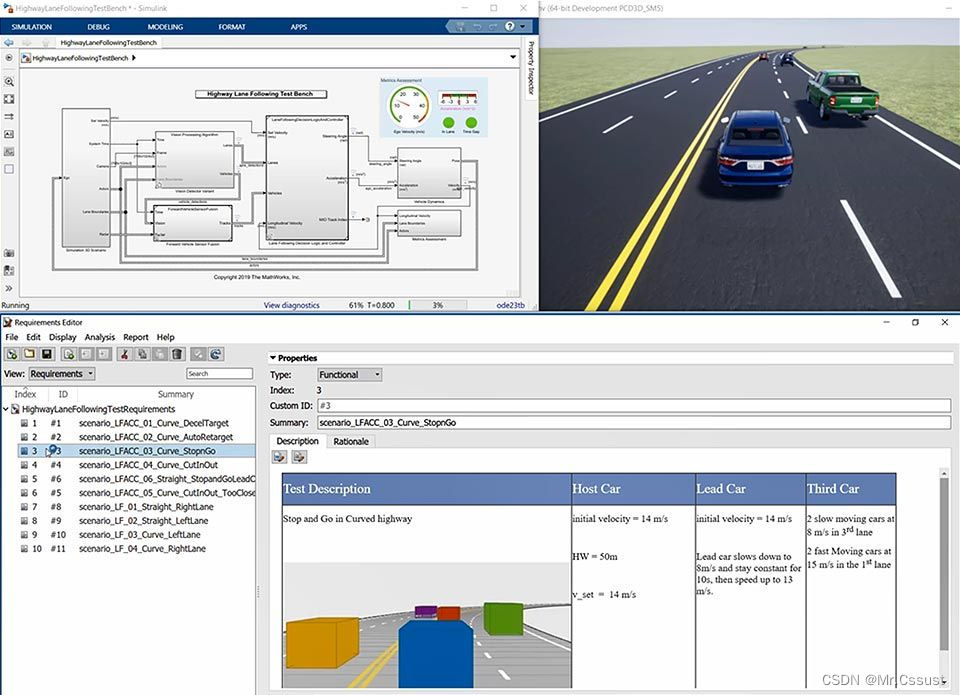
基于Matlab/Simulink开发自动驾驶的解决方案
文章目录
处理自动驾驶数据
仿真自动驾驶场景
设计感知算法
设计规划和控制算法
生成代码和部署算法
集成和测试
参考文献 使用 MATLAB/Simulink开发自动驾驶,能够深入建模真实世界的行为、减少车辆测试并验证嵌入式软件的功能,从而推进自动驾驶感…
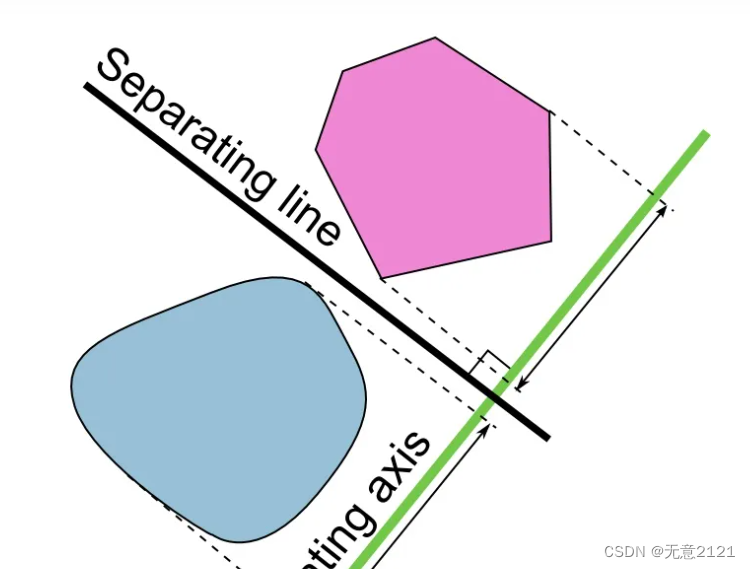
自动驾驶轨迹规划之碰撞检测(一)
欢迎大家关注我的B站:
偷吃薯片的Zheng同学的个人空间-偷吃薯片的Zheng同学个人主页-哔哩哔哩视频 (bilibili.com)
目录
1.碰撞检测的意义
2.安全走廊
3 计算几何
4 AABB与OBB 1.碰撞检测的意义
对于自动驾驶汽车或机器人的路径规划,碰撞检测是其…
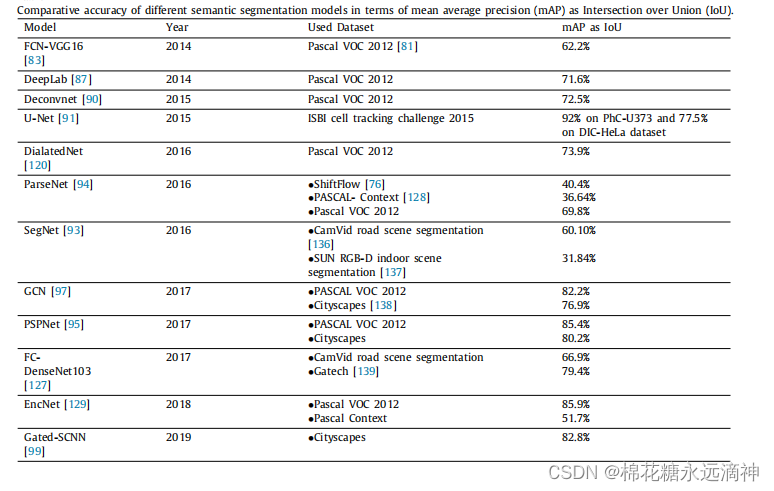
自动驾驶预测-决策-规划-控制学习(5):图像分割与语义分割入门
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 论文题目:Evolution of Image Segmentation using Deep Convolutional Neural Network: A Survey前言:图像分割与语义分割一、图像分割是什么…

用于自动驾驶最优间距选择和速度规划的多配置二次规划(MPQP) 论文阅读
论文链接:https://arxiv.org/pdf/2401.06305.pdf
论文题目:用于自动驾驶最优间距选择和速度规划的多配置二次规划(MPQP)
1 摘要
本文介绍了用于自动驾驶最优间距选择和速度规划的多配置二次规划(MPQP)。…
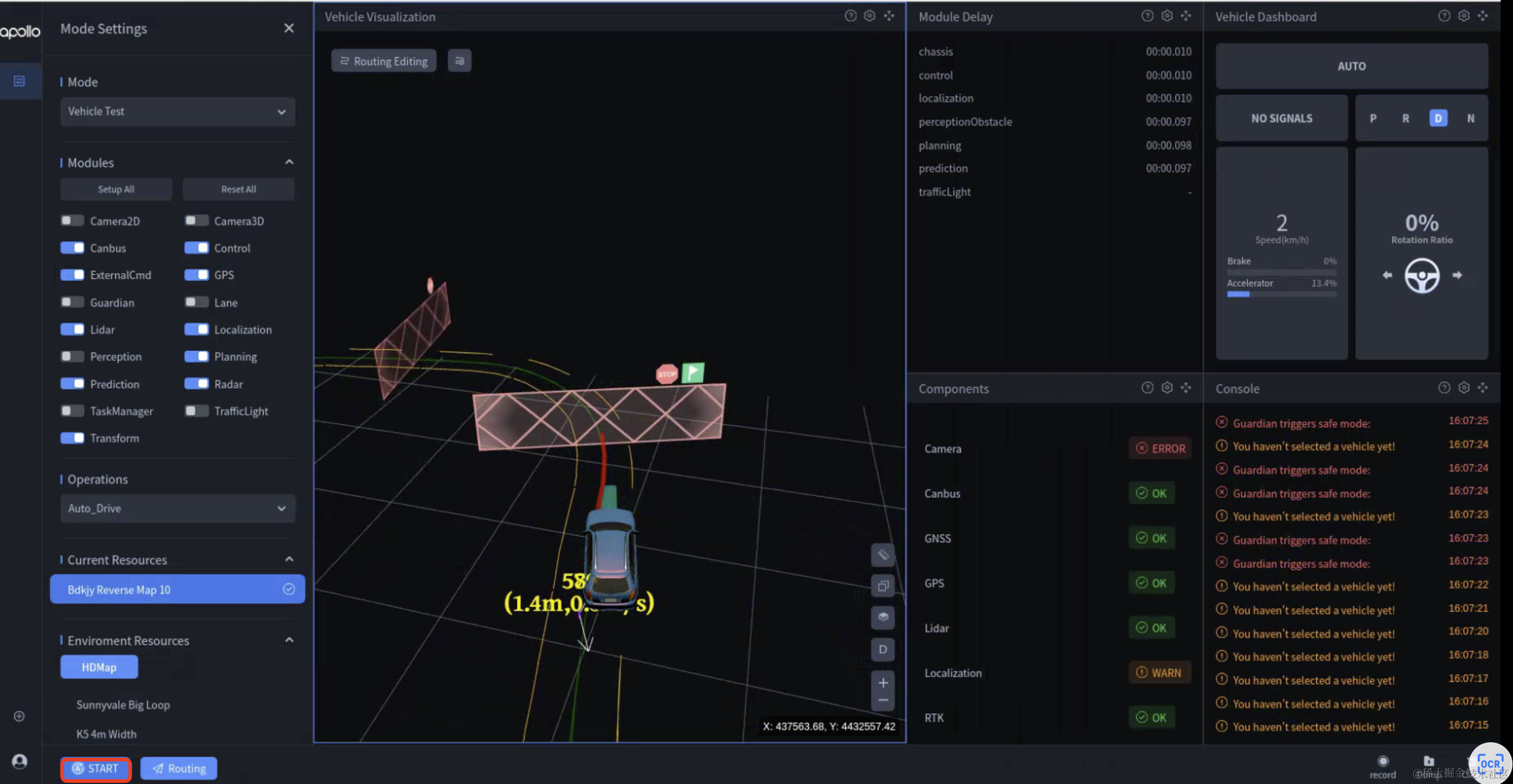
百度Apollo | 实车自动驾驶:感知、决策、执行的无缝融合
🎬 鸽芷咕:个人主页 🔥 个人专栏:《linux深造日志》《粉丝福利》 ⛺️生活的理想,就是为了理想的生活! ⛳️ 粉丝福利活动 ✅参与方式:通过连接报名观看课程,即可免费获取精美周边 ⛳️活动链接…

曲线生成 | 图解三次样条曲线生成原理(附ROS C++/Python/Matlab仿真)
目录 0 专栏介绍1 什么是样条?2 三次样条曲线原理2.1 曲线插值2.2 边界条件2.3 系数反解 3 算法仿真3.1 ROS C仿真3.2 Python仿真3.3 Matlab仿真 0 专栏介绍
🔥附C/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细…

低代码平台在自动驾驶系统开发中的应用
自动驾驶技术的发展正在为交通领域带来革命性的变化。其中关键的一环是自动驾驶系统的开发,该过程通常需要大量的编程工作和复杂的算法。然而,随着低代码技术的崛起,开发者能够大幅简化自动驾驶系统的开发过程,为了降低开发难度和…

百度Apollo:激光雷达检测技术深度解析
🎬 鸽芷咕:个人主页 🔥 个人专栏:《linux深造日志》《粉丝福利》 ⛺️生活的理想,就是为了理想的生活! ⛳️ 粉丝福利活动 ✅参与方式:通过连接报名观看课程,即可免费获取精美周边 ⛳️活动链接…
人形机器人创新发展顶层设计与关键技术布局
系列文章目录 前言
随着新一轮科技革命和产业变革的深入推进,我国高度重视人形机器人的创新发展,提出了一系列具有前瞻性和战略性的指导意见。规划指出,到2025年,我国将初步建立人形机器人创新体系,攻克“大脑”、“小…
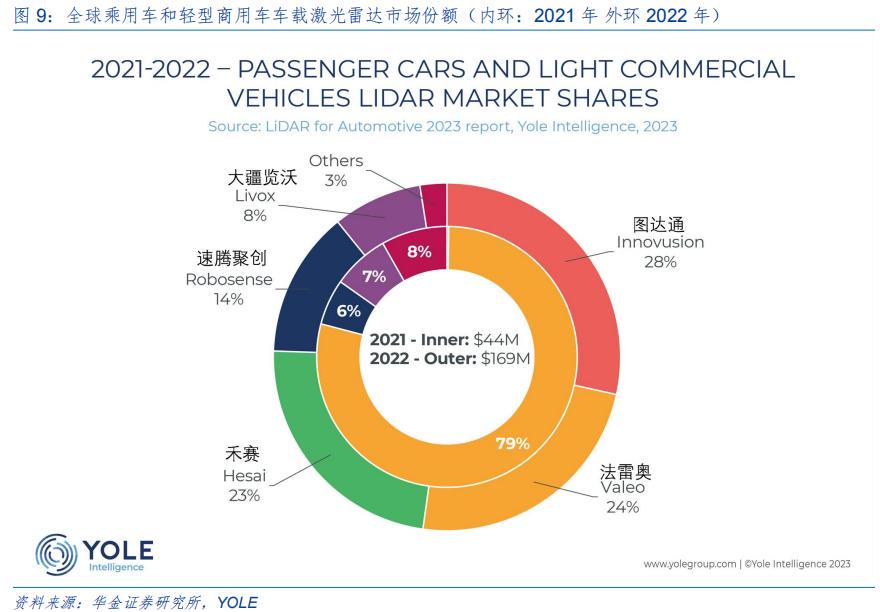
华为产业链之车载激光雷达
一、智能汽车 NOA 加快普及,L3 上路利好智能感知硬件
1、感知层是 ADAS 最重要的一环 先进驾驶辅助系统 (ADAS, Advanced driver-assistance system)分“感知层、决策层、执行层”三个层级,其中感知层是最重要的一环…
ROS2高效学习第二章 -- ros2常用命令和相关概念学习,熟练玩起来小乌龟样例
ros2常用命令和相关概念学习,熟练玩起来小乌龟样例 1 前言和资料2 正文2.1 版本选择和环境搭建2.2 跑起来小乌龟样例2.3 理解节点node2.4 理解话题topic和消息msg2.5 理解服务service2.6 理解参数parameter2.7 理解动作action2.8 理解计算图源名称(graph…
【知识---什么是ARM计算机架构】
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言精简指令集计算机(RISC):低功耗:多种应用:多种架构:生态系统:可定制性&#…
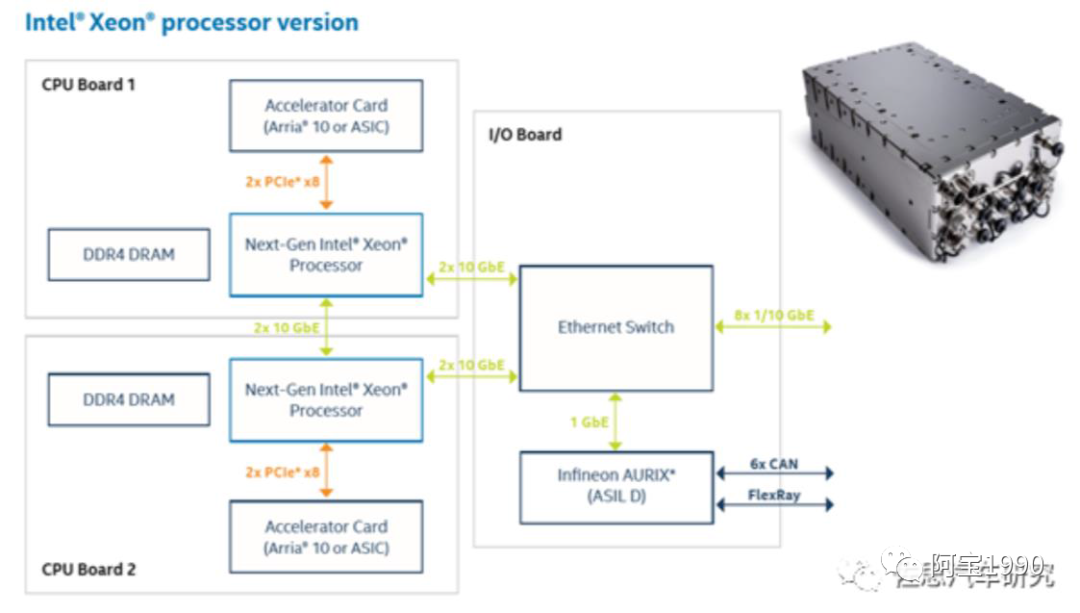
自动驾驶SoC:自动驾驶竞赛的制高点
汽车半导体的概念,什么是汽车芯片
汽车半导体概念宽广,在汽车电动化、智能化、网联化、共享化等各领域发挥重要作用,其按照功能分为汽车芯片、功率器件、传感器等。
其中芯片又称为集成电路,集成度很高;人们常说的汽…

Linux-ROS学习之旅(一)
##本人使用的是双系统,noetic版本,学习ROS初衷是学习控制机械臂,具体下载方法见B站,观看的教程是古月居早年的教学视频,和ROS_wiki:ROS/Tutorials - ROS Wiki ##下一篇文章有具体的实例,但是所用…
高速自动驾驶安全停靠功能规范
安全停靠功能规范
Safe Stop Functional Specification
目录
1 概述....................................................................................................................... 7
1.1 目的...........................................................…
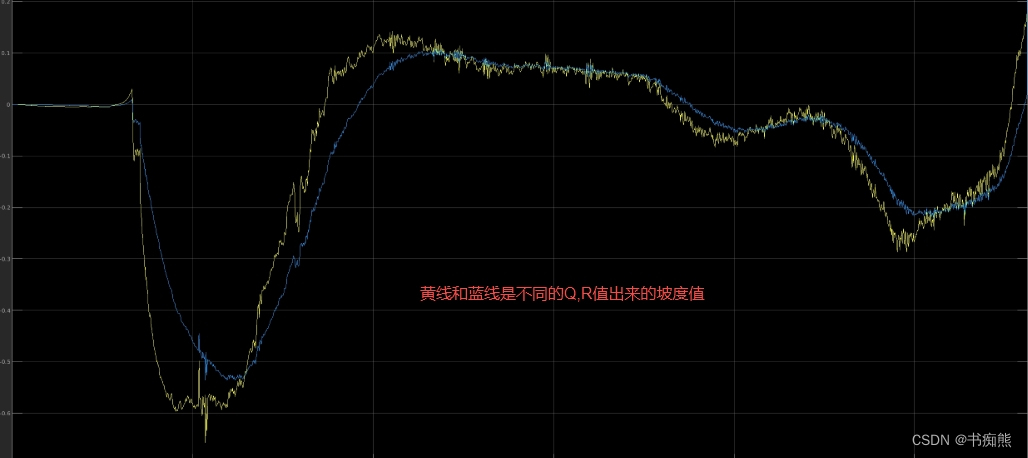
自动驾驶状态观测1-坡度估计
背景
自动驾驶坡度对纵向的跟踪精度和体感都有一定程度的影响。行车场景虽然一般搭载了GPS和IMU设备,但pitch角一般不准,加速度也存在波动大的特点。泊车场景一般在室内地库,受GPS信号遮挡影响,一般无法获取高程和坡度。搭载昂贵…
ros2 ubuntu 20.04 安装 foxy
设置区域设置
确保您有一个支持UTF-8. 如果您处于最小环境(例如 docker 容器)中,则区域设置可能是最小的,例如POSIX. 我们使用以下设置进行测试。但是,如果您使用不同的 UTF-8 支持的区域设置,应该没问题。…
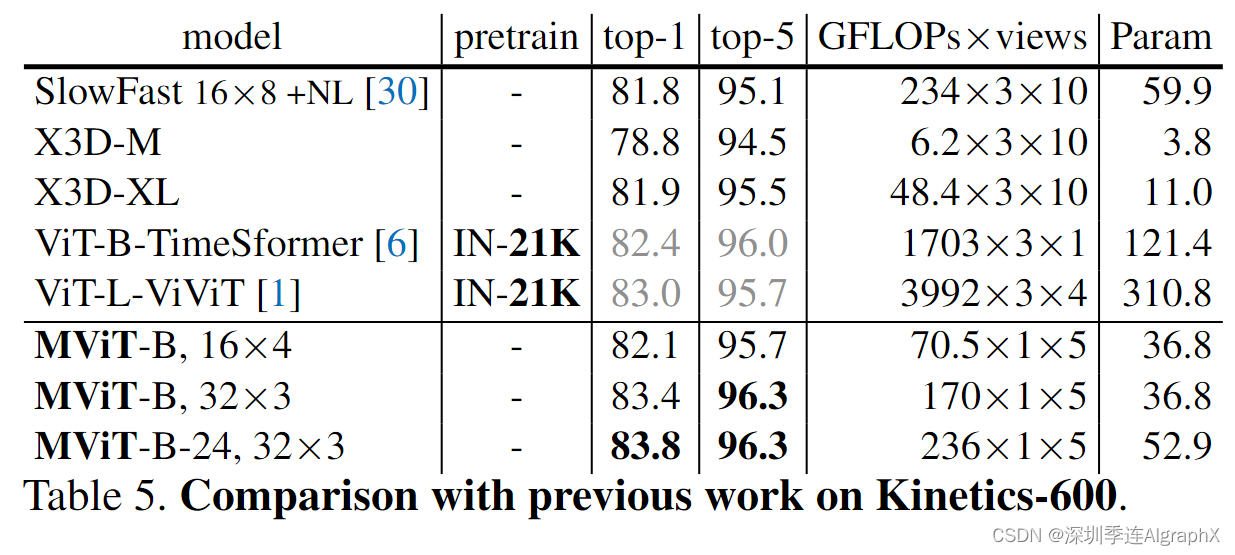
51-17 视频理解串讲— MViT 论文精读
继TimeSformer模型之后,咱们再介绍两篇来自Facebook AI的论文,即Multiscale Vision Transformers以及改进版MViTv2: Improved Multiscale Vision Transformers for Classification and Detection。
由于本司大模型组最近组织阅读的论文较多,…
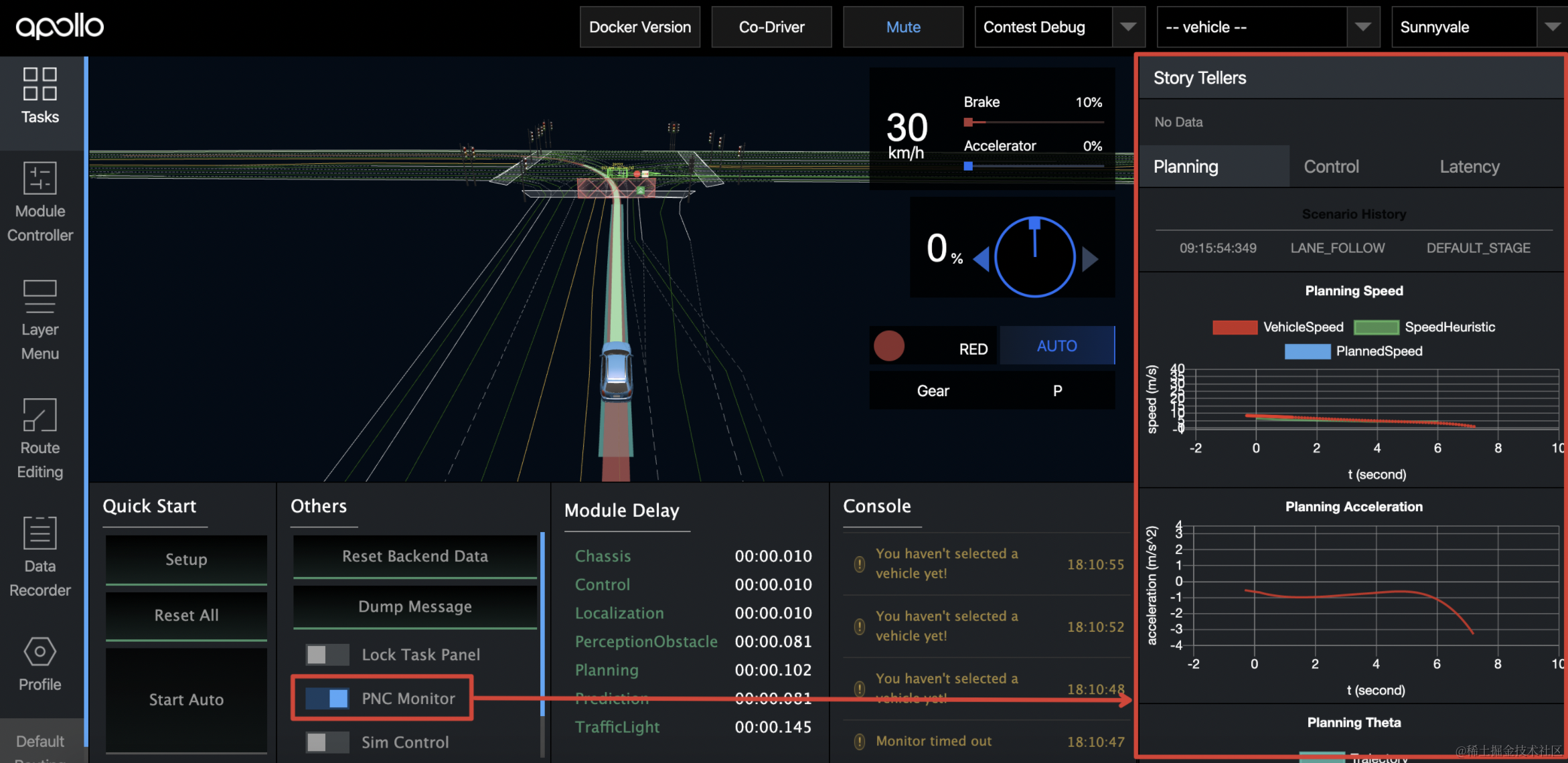
【百度Apollo】本地调试仿真:加速自动驾驶系统开发的利器
🎬 鸽芷咕:个人主页 🔥 个人专栏: 《linux深造日志》《粉丝福利》 ⛺️生活的理想,就是为了理想的生活! ⛳️ 推荐 前些天发现了一个巨牛的人工智能学习网站,通俗易懂,风趣幽默,忍不住分享一下…

自动驾驶:Apollo如何塑造人类的未来出行
前言 前些天发现了一个巨牛的人工智能学习网站,通俗易懂,风趣幽默,忍不住分享一下给大家:https://www.captainbed.cn/z
ChatGPT体验地址 文章目录 前言1. 什么是自定义指令?2. Apollo中的自定义指令2.1 查询中的自定…

自动驾驶IPO第一股及商业化行业标杆 Mobileye
一、Mobileye 简介
Mobileye 是全球领先的自动驾驶技术公司,成立于 1999 年,总部位于以色列耶路撒冷。公司专注于开发视觉感知技术和辅助驾驶系统 (ADAS),并在自动驾驶领域处于领先地位。Mobileye 是高级驾驶辅助系统(ADAS&#…

Mobileye CES 2024 自动驾驶新技术新方向
Mobileye亮相2024年国际消费类电子产品展览会推出什么自动驾驶新技术?
Mobileye再次亮相CES,展示了我们的最新技术,并推出了Mobileye DXP--我们全新的驾驶体验平台。
与往年一样,Mobileye是拉斯维加斯展会现场的一大亮点,让参观…
自动驾驶传感器之 摄像头传统视觉技术
1.前言
相 信 很 多 通 过 之 前 摄 像 头 的 基 础 知 识 讲 解 , 已 经 对 车 载 摄 像 头 有 一 定 的 了 解 , 摄 像头 两 大 主 要 功 能 是 定 位 和 感 知 , 我 们 通 过 不 同 的 软 硬 件 来 实 现 前 向 碰 撞 预 警 、 行 人 探 …

【目标跟踪】相机运动补偿
文章目录 一、前言二、简介三、改进思路3.1、状态定义3.2、相机运动补偿3.3、iou和ReID融合3.4、改进总结 四、相机运动补偿 一、前言
目前 MOT (Multiple Object Tracking) 最有效的方法仍然是 Tracking-by-detection。今天给大家分享一篇论文 BoT-SORT。论文地址 ࿰…
自动驾驶代客泊车AVP泊车规划模块详细设计
目录
1. 背景... 3
2. 泊车模块架构图... 4
3. 泊车规划模块信号... 5
3.1 输入信号... 5
3.2 输出信号... 5
4. 模块预处理... 6
4.1 坐标系转换... 6
4.2 车库及轨迹处理策略... 7
5. 泊车规划模块算法设计... 8
5.1 泊入规划模块... 8
5.1.1 泊入…
MATLAB - 仿真单摆的周期性摆动
系列文章目录 前言
本例演示如何使用 Symbolic Math Toolbox™ 模拟单摆的运动。推导摆的运动方程,然后对小角度进行分析求解,对任意角度进行数值求解。 一、步骤 1:推导运动方程
摆是一个遵循微分方程的简单机械系统。摆最初静止在垂直位置…

巨人踏步,港口自动驾驶提速向前打开行业新空间
按照吞吐量排名,全世界最大的50个港口,中国占了29个。在中国的港口和码头上,一场进化正在发生:人在这个生态中占的比重越来越少,技术接管的要素正在越来越多。像是最具代表性的全球综合自动化程度最高的码头——上海洋…
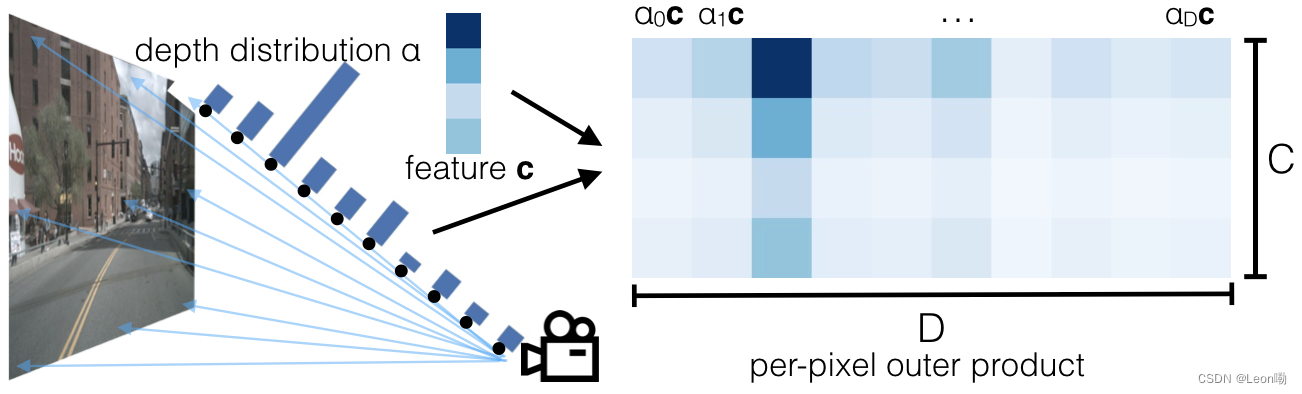
基于视觉定位技术选型
视觉定位技术定义 介绍 本文档旨在帮助您选择基于视觉定位技术的方案。视觉定位技术是指利用计算机视觉和机器学习等技术,对图像中的物体进行识别、定位和跟踪,以实现对物体的感知和控制。本文将介绍基于视觉定位技术的优缺点、适用场景和选型方案。
基…

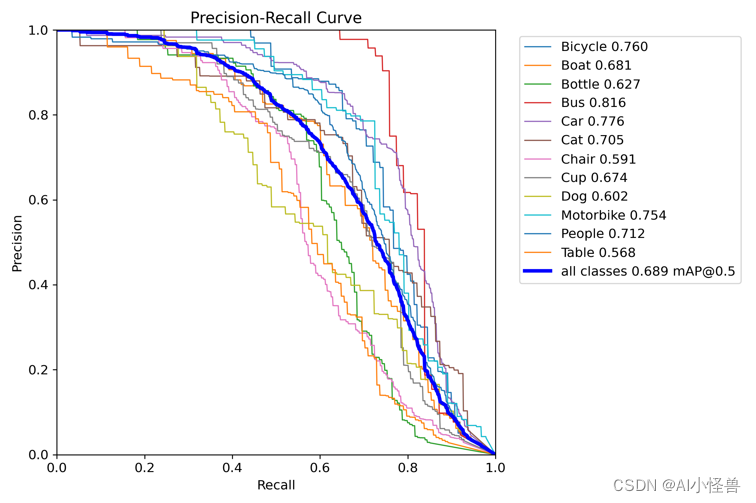
基于YOLOv8的暗光低光环境下(ExDark数据集)检测,加入多种优化方式---自研CPMS注意力,效果优于CBAM ,助力自动驾驶(二)
💡💡💡本文主要内容:详细介绍了暗光低光数据集检测整个过程,从数据集到训练模型到结果可视化分析,以及如何优化提升检测性能。
💡💡💡加入 自研CPMS注意力 mAP0.5由原始的0.682提升…
自动驾驶稳步迈向商业化应用
发展自动驾驶技术,是建设交通强国的重要内容。近年来,随着人工智能、5G、大数据等新技术快速发展,自动驾驶技术在交通运输领域加快应用,实现由封闭场地测试到道路测试、由试点示范到商业试运营的快速迭代。 交通运输部日前印发《自…
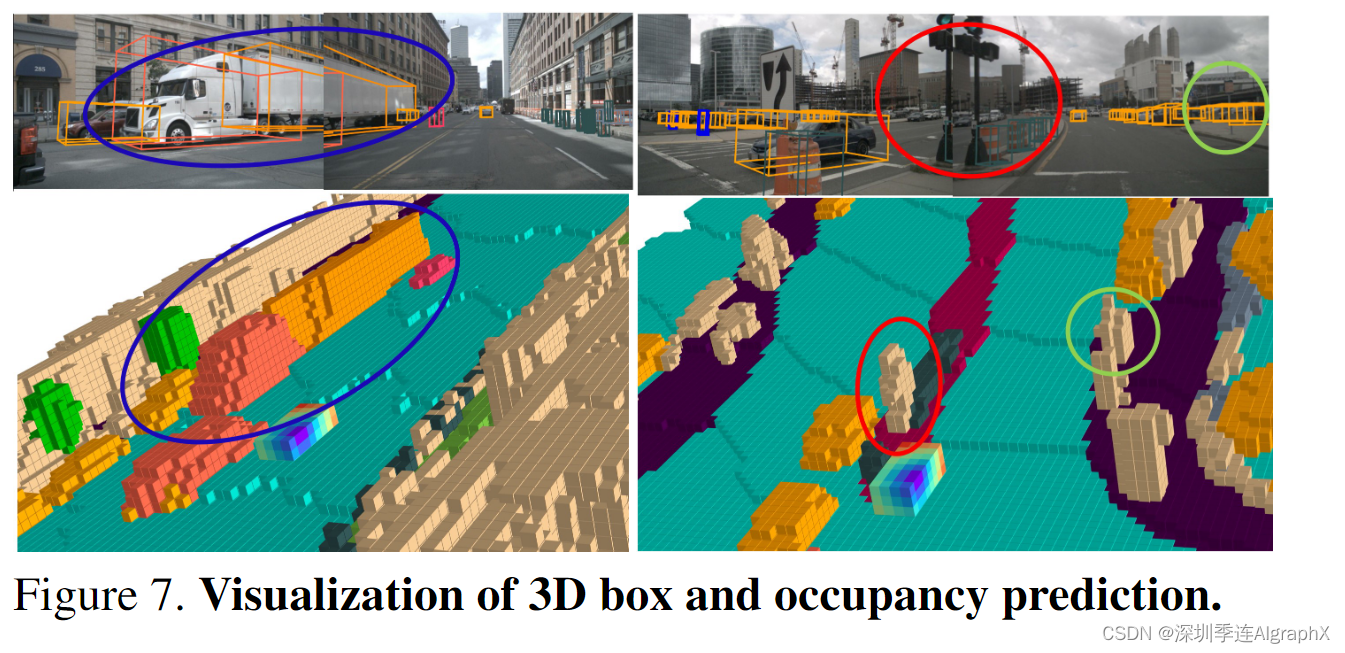
51 -25 Scene as Occupancy 3D占用作为场景表示 论文精读
本文阅读的文章是Scene as Occupancy,介绍了一种将物体表示为3D occupancy的新方法,以描述三维场景,并用于检测、分割和规划。
文章提出了OccNet和OpenOcc两个核心概念。
OccNet 3D占用网络是一种以多视图视觉为中心的方法,通过…
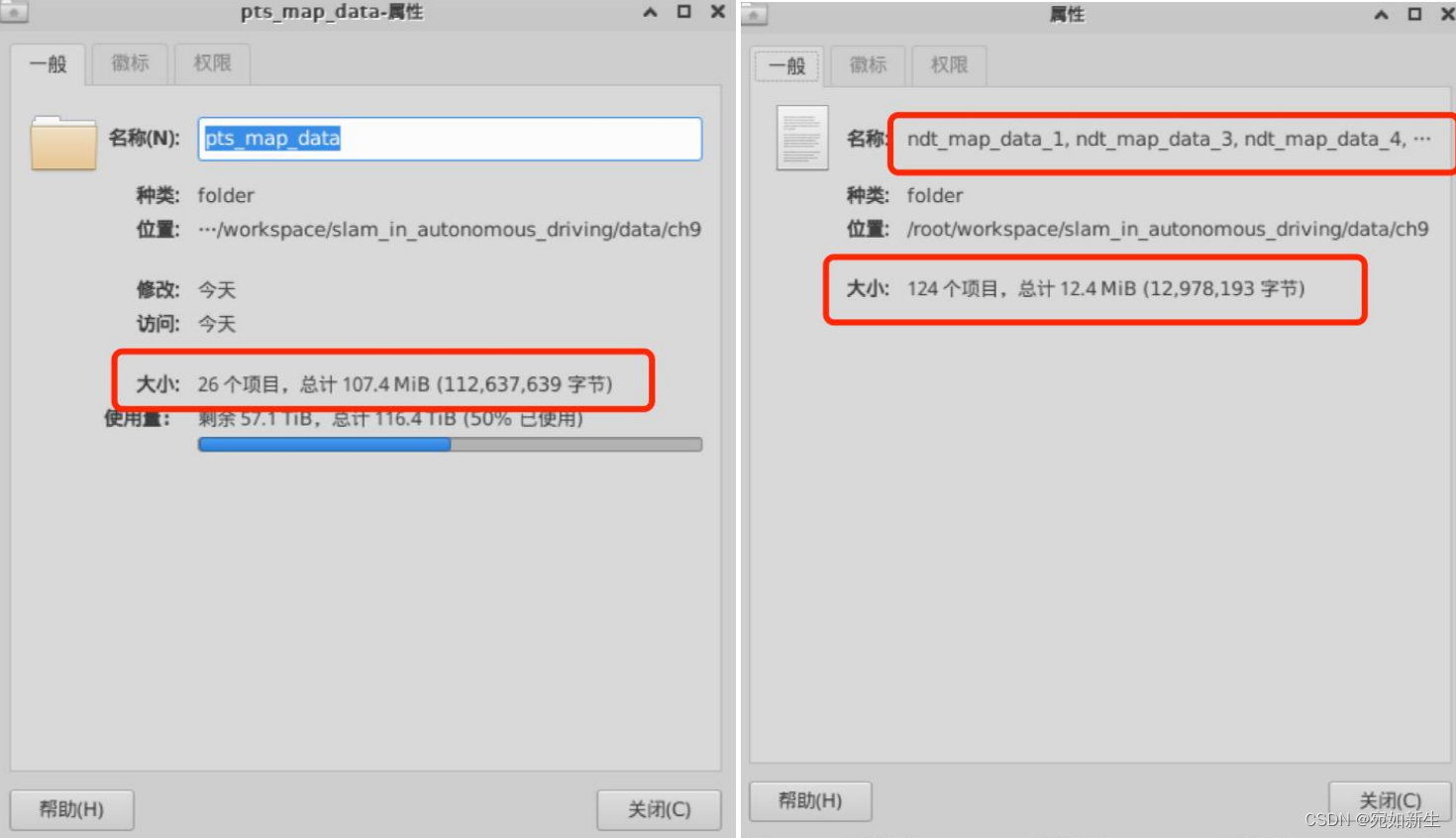
8. 《自动驾驶与机器人中的SLAM技术》基于保存的自定义NDT地图文件进行自动驾驶车辆的激光定位
目录
1. 为 NDT 设计一个匹配度评估指标,利用该指标可以判断 NDT 匹配的好坏。
2. 利用第 1 题的指标,修改程序,实现 mapping 部分的回环检测。
3. 将建图结果导出为 NDT map,即将 NDT 体素内的均值和协方差都存储成文件。
4.…
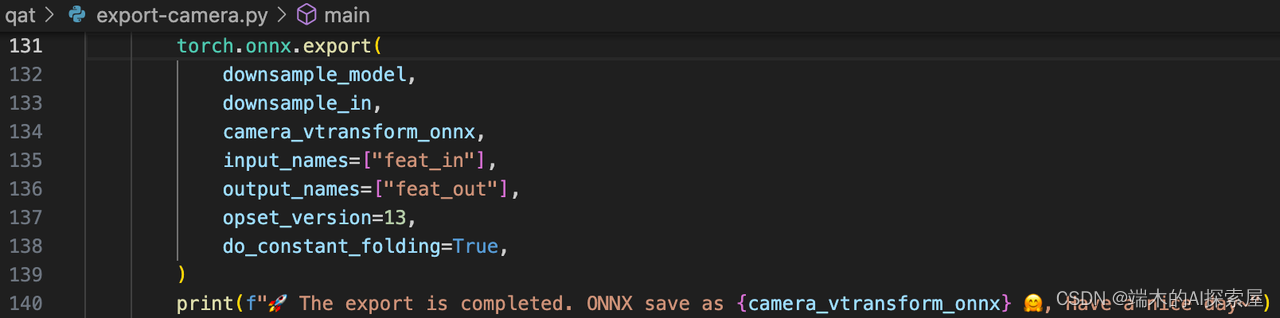
MIT-BEVFusion系列八--onnx导出1 综述及相机网络导出
目录 综述export-camera.py加载模型加载数据生成需要导出成 onnx 的模块Backbone 模块VTransform 模块 生成 onnx使用 pytorch 原生的伪量化计算方法导出 camera.backbone.onnx导出 camera.vtransform.onnx 综述
bevfusion的各个部分的实现有着鲜明的特点,并且相互…
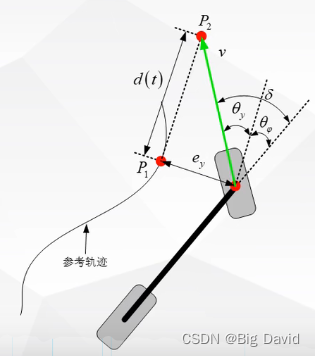
路径跟踪算法Stanley 实现 c++
参考博客:【自动驾驶】Stanley(前轮反馈)实现轨迹跟踪 | python实现 | c实现
Stanley
前轮反馈控制(Front wheel feedback),又称Stanley控制。 核心思想:基于前轮中心的路径跟踪偏差量对方向盘转向控制量进行计算(Pure Pursuit是…

曲线生成 | 图解贝塞尔曲线生成原理(附ROS C++/Python/Matlab仿真)
目录 0 专栏介绍1 贝塞尔曲线的应用2 图解贝塞尔曲线3 贝塞尔曲线的性质4 算法仿真4.1 ROS C仿真4.2 Python仿真4.3 Matlab仿真 0 专栏介绍
🔥附C/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法…
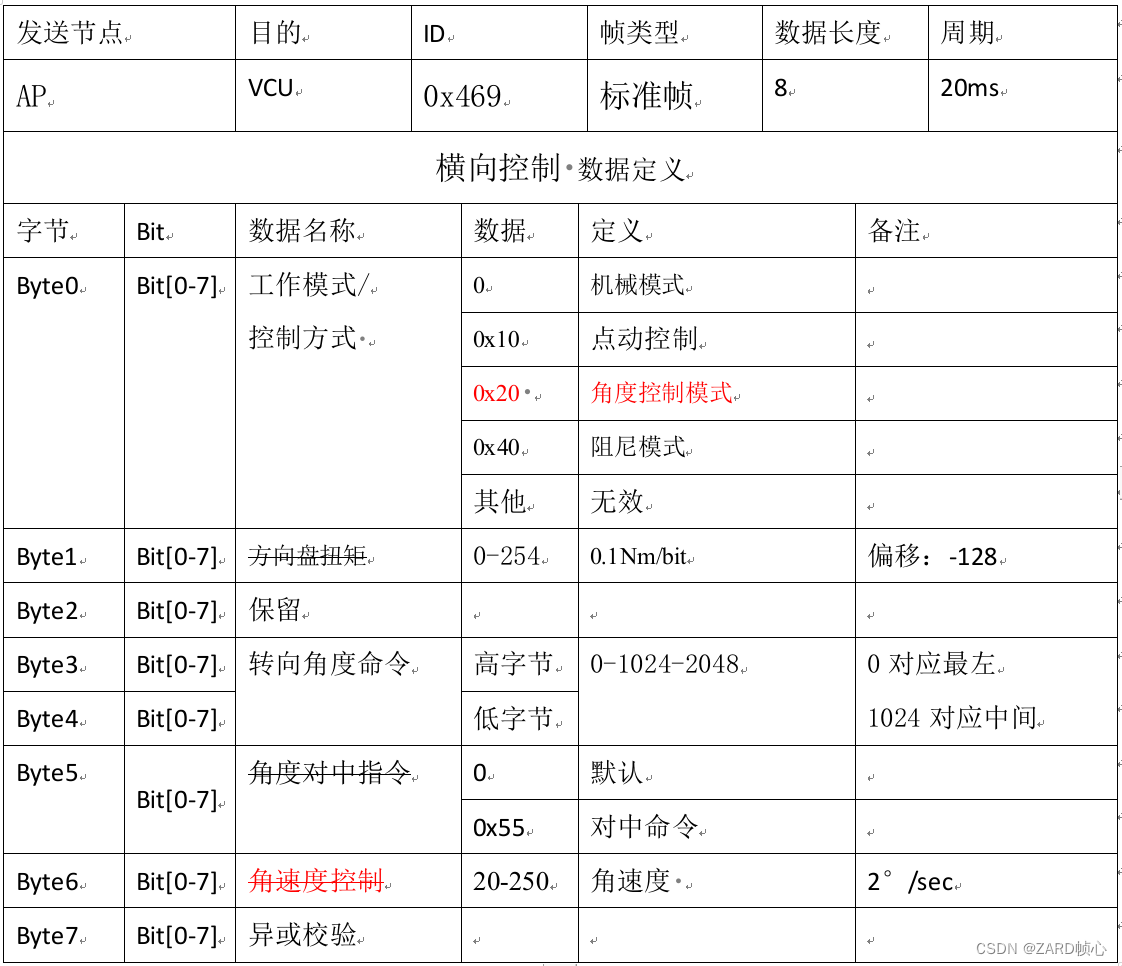
Nvidia Jetson AGX Orin使用CAN与底盘通信(ROS C++ 驱动)
文章目录 一、Nvidia Jetson AGX Orin使用CAN通信1.1 CAN使能配置修改GPIO口功能1.2 can收发测试 二、通过CAN协议编写CAN的SocketCan ROS1驱动程序2.1 通讯协议2.2 接收数据节点2.3 发送数据节点2.4 功能包配置 三、ROS2驱动程序 一、Nvidia Jetson AGX Orin使用CAN通信
参考…
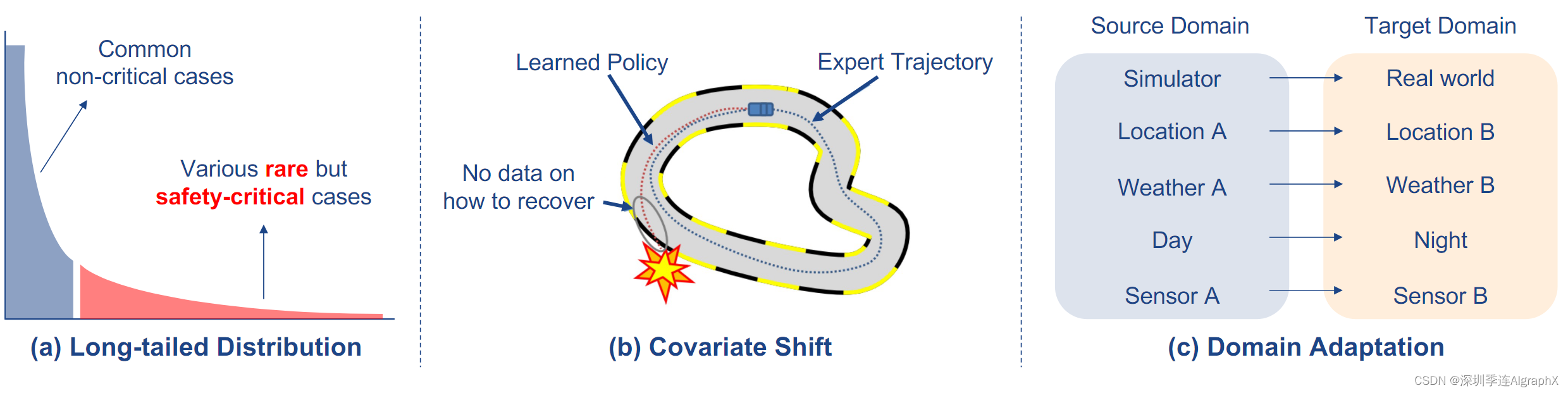
51-2 万字长文,深度解读端到端自动驾驶的挑战和前沿
去年初,我曾打算撰写一篇关于端到端自动驾驶的文章,发现大模型在自动驾驶领域的尝试案例并不多。遂把议题扩散了一点,即从大模型开始,逐渐向自动驾驶垂直领域靠近,最后落地到端到端。这样需要阐述的内容就变成LLM基础模…
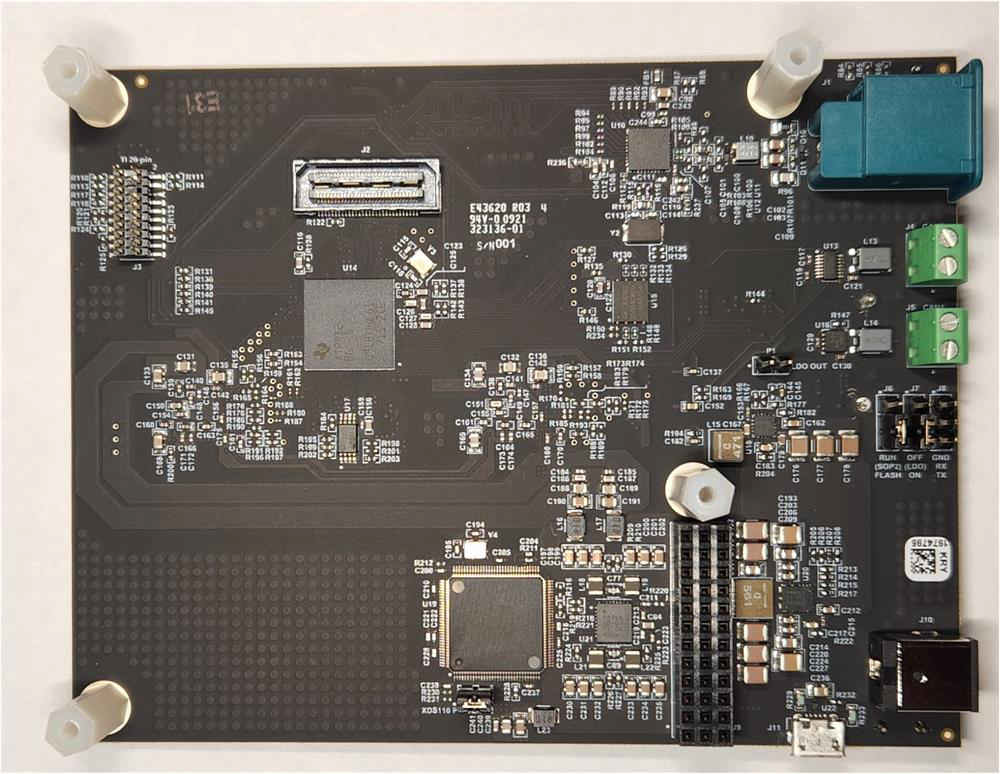
适用于汽车 4D 成像雷达的双器件毫米波级联参考设计(TI文档)
说明 该汽车雷达参考设计是一个 76GHz 至 81GHz 的级联雷达传感器模块。这包括由 AWR2243 器件和AM2732R 雷达处理器构成的双器件级联阵列。在这一级联雷达配置中,一个主器件向主器件和辅助器件分配20GHz 的本机振荡器 (LO) 信号,使这两个器件作为单个射…
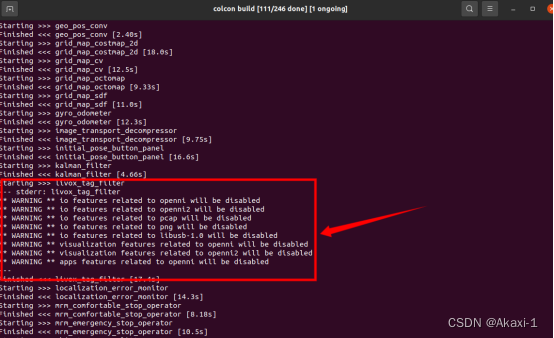
【基于Ubuntu20.04的Autoware.universe安装过程】方案二:双系统 | 详细记录 | 全过程图文 by.Akaxi
目录
一、Autoware.universe背景
Part-1:安装双系统教程
二、查看Windows引导方式
三、制作安装盘
四、设置电脑配置
1.关闭bitlocker
2.压缩硬盘分区
3.关闭Secure Boot
4.关闭intel RST
5.BIOS设置U盘引导
五、安装Ubuntu20.04
1.ventoy引导
2.安装配…
关于视觉3d目标检测学习像素深度的一点理解
在真实世界的一个物体,可以通过相机矩阵将其投影到像素坐标系上
但是,在像素坐标系上的像素,由于相机的原理,导致它的深度信息已经没有了,所以原理上是没法得到其真实深度的(即3d位置)
那么现在的深度学习方法又为什…

特斯拉FSD的神经网络(Tesla 2022 AI Day)
这是特斯拉的全自动驾驶(Full Self Driver)技术结构图,图中把自动驾驶模型拆分出分成了几个依赖的模块:
技术底座:自动标注技术处理大量数据,仿真技术创造图片数据,大数据引擎进不断地更新&…
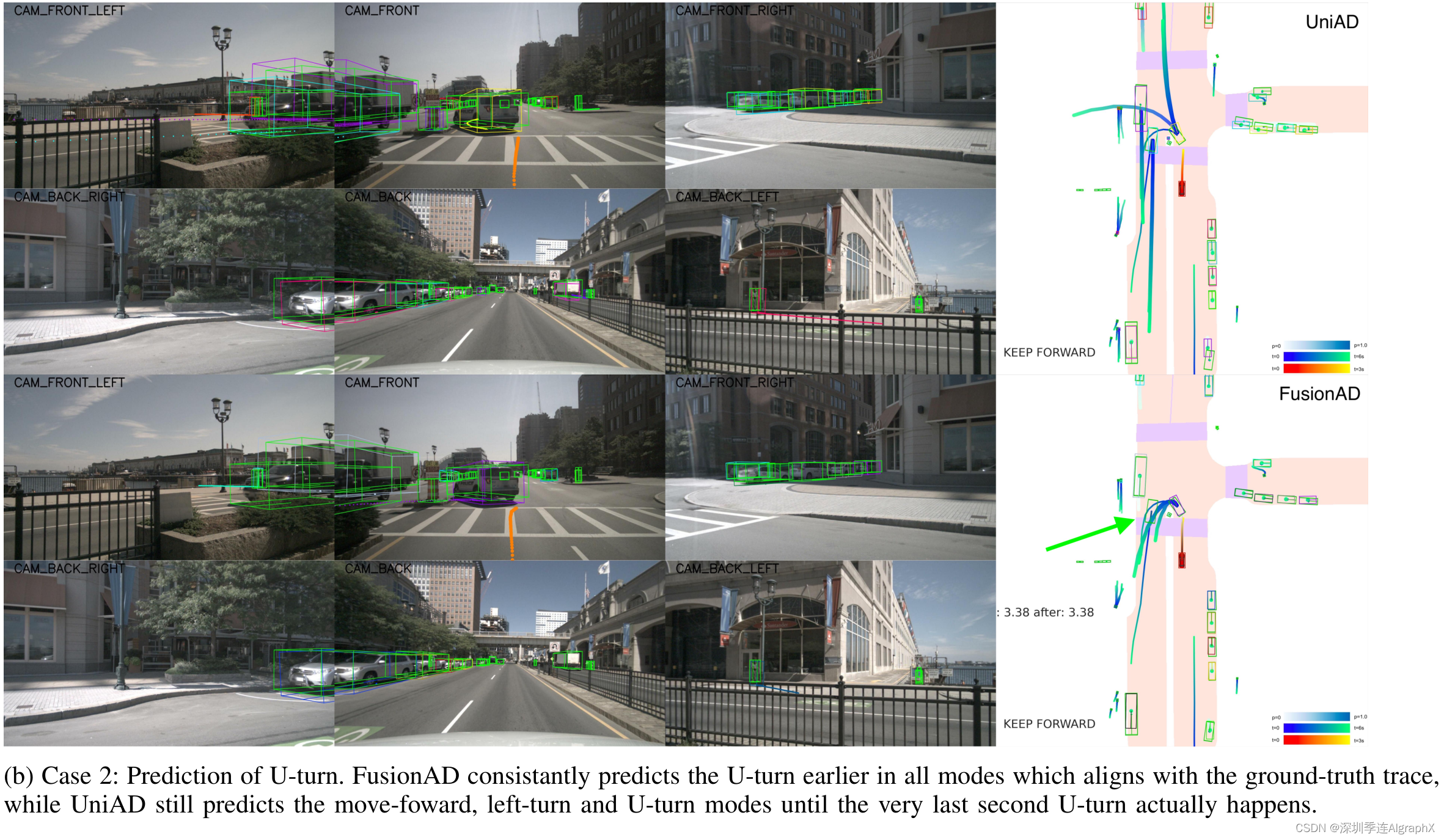
51-16 FusionAD 用于自动驾驶预测与规划任务的多模态融合论文精读
今天要分享的是基于BEV的多模态、多任务、端到端自动驾驶模型FusionAD,其专注于自动驾驶预测和规划任务。这项工作首次发表于2023年8月2日,性能超越了2023 CVPR最佳论文UniAD模型。论文题目是FusionAD: Multi-modality Fusion for Prediction and Planni…
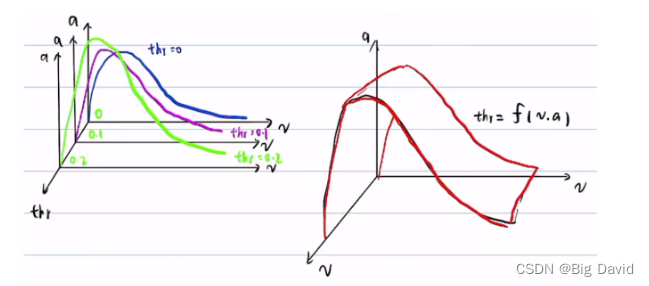
双环PID控制详细讲解
参考博客: (1)PID双环控制(速度环和位置环) (2)PID控制(四)(单环与双环PID) (3)内外双环pid算法
0 单环PID
目标位置→系…
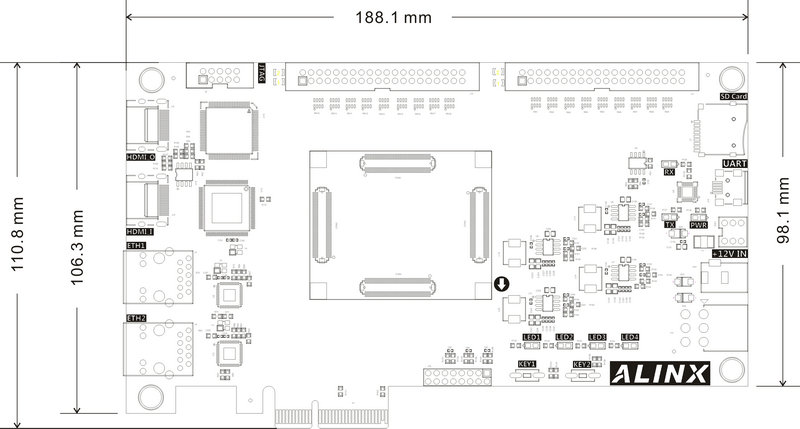
产品推荐 - ALINX XILINX FPGA开发板 Artix-7 XC7A100T-2FGG484I
01开发板介绍
此款开发板采用核心板扩展板的模式,方便用户对核心板的二次开发利用。FPGA使用的是Xilinx公司的ARTIX-7系列的芯片,型号为XC7A100T-2FGG484I。在核心板使用了2片MICRON公司的MT41J256M16HA-125 DDR3芯片,组合成32bit的数据总线…

【多智能体强化学习02---训练范式+独立学习+多智能体策略梯度算法】
文章目录 多智能体强化学习训练和执行范式CTCEDTDECTDE MARL符号表示分布式学习(Independent Learning)基于值函数的分布式学习(Independent value-based learning)基于策略梯度的分布式学习(Independent policy gradient learning) 多智能体…
2024.03.08 校招 实习 内推 面经
绿*泡*泡VX: neituijunsir 交流*裙 ,内推/实习/校招汇总表格
1、校招&实习 | 小马智行Pony.ai 2024春季校园招聘启动&可转正实习(内推)
校招&实习 | 小马智行Pony.ai 2024春季校园招聘启动&可转正实习&#…
基于MPC模型的自动驾驶控制总结---参考学习链接以及常规知识--simulink mpc和adapter mpc的关系和区别
1,mpc
2,adapter mpc
3,参考链接: 微信文章:简析MPC及其实践(二)simulink实践 MPC模型预测控制(6)–MPC与无人驾驶轨迹跟踪,以及mpc和adapter mpc的区别
2024.2.17校招 实习 内推 面经
绿*泡*泡VX: neituijunsir 交流*裙 ,内推/实习/校招汇总表格 1、校招 & 社招 | ITC2024春季招聘正式开启
校招 & 社招 | ITC2024春季招聘正式开启 2、校招 | 无锡地铁集团有限公司2024届校园招聘公告
校招 | 无锡地铁集团有限公司2024届校园…
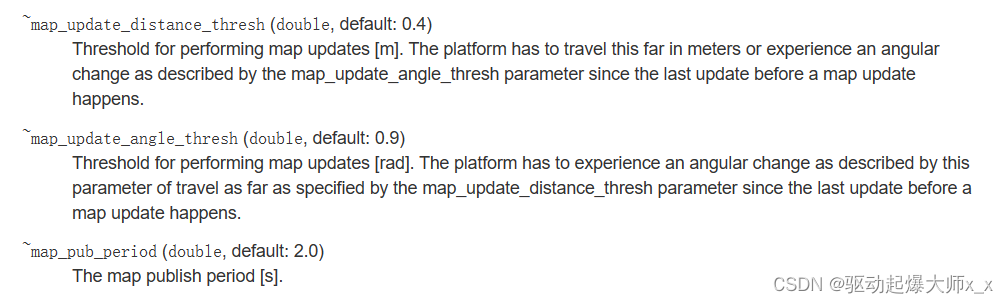
《Ubuntu20.04环境下的ROS进阶学习5》
一、Hector_Mapping构建二维地图 在前面我们已经介绍了如何使用激光雷达来扫描地图,如何用激光雷达来建造地图,本节我们将两者结合起来,通过Hector_Mapping功能包实现SLAM。 二、在仿真环境中进行2D SLAM
1、下载Hector_Mapping
sudo apt i…
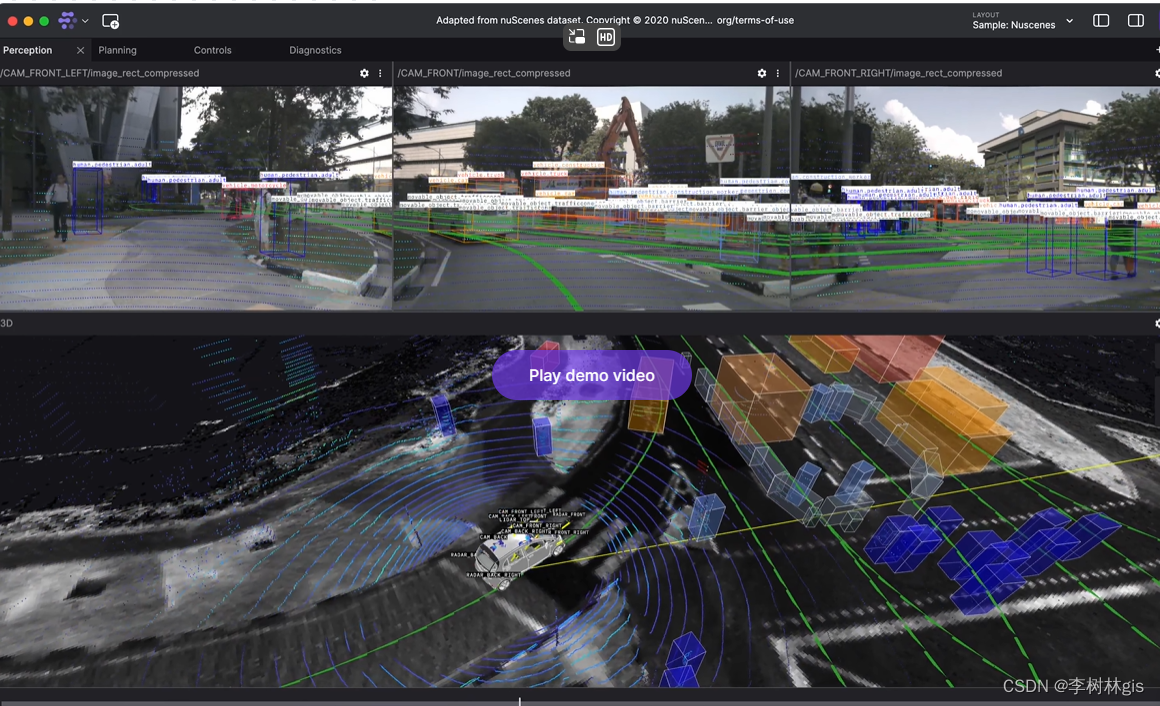
【自动驾驶可视化工具】
自动驾驶可视化工具 自动驾驶可视化工具1.百度Apollo的Dreamview:2.Cruise的Worldview:3.Uber的AVS:4.Fglovex Studio: 自动驾驶可视化工具
介绍一下当前主流的自动驾驶可视化工具。
1.百度Apollo的Dreamview:
Dreamview是百度Apollo平台开发的一种可视化工具,用…
【感知算法】Dempster-Shafer理论(上)
Dempster-Shafer理论
三个概念Mass Belief Plausibility 一个论断的置信度,表达为一个区间,上下界为plausibility\belief, b e l i e f < p l a u s i b i l i t y belief < plausibility belief<plausibility. mass是各个论断子集…
自动驾驶中的障碍物时间对齐法
描述
自动驾驶算法使用的系统往往不是实时系统,因此每个节点间拿到的数据可能不是同一时间的数据,从而造成系统误差,针对这一现象,工程上往往采用时间对齐内插外推法。这里我们用感知障碍物来举例。
自动驾驶系统有许多重要模块…
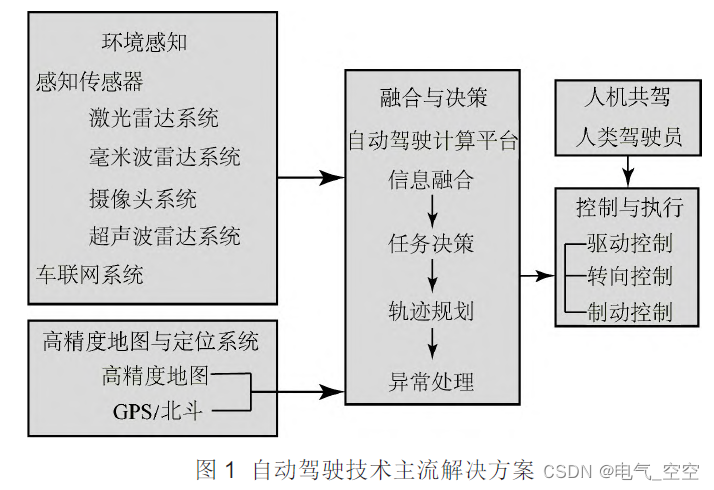
L4 级自动驾驶汽车发展综述
摘要:为了减小交通事故概率、降低运营成本、提高运营效率,实现安全、环保的出行,自动驾驶 技术的发展已成为大势所趋,而搭配有L4 级自动驾驶系统的车辆是将车辆驾驶全部交给系统。据此,介绍了自动驾驶汽车的主流技术解决方案;分析了国内外L4 级自动驾驶汽车的已发布车型、…
自动驾驶坐标系与旋转矩阵的确定(位置补偿)
最近新接受的模块需要做位置补偿,按说是比较简单的。但是因为坐标系的问题导致了诸多麻烦出现,事后复盘如下:
一个未知的坐标系如何确定方向: 此处出现了转换WGS坐标系转东北天,且东北天第一帧初始化局部坐标系。
此…
自动驾驶---Motion Planning之Path Boundary
1 背景 在上文《自动驾驶---Motion Planning之LaneChange》中,笔者提到过两种LaneChange的思路,这里再简单回顾一下:(1)利用Routing和周围环境的信息,决定是否进行换道的决策;(2)采用的博弈思想(蒙特卡洛树搜索---MCTS)决定是否进行换道的决策。不管是变道,避让还是…
12.18 校招 实习 内推 面经
绿*泡*泡VX: neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、实习&校招 | 寒序科技 2024实习/校招/合伙人招募启动
实习&校招 | 寒序科技 2024实习/校招/合伙人招募启动 2、校招 | 北京海纳川汽车部件2024届校园招聘火热进行中
校招 | 北…

一种基于道路分类特性的超快速车道检测算法
摘要:
本文介绍了一种新颖、简单但有效的车道检测公式。 车道检测是自动驾驶和高级驾驶员辅助系统 (ADAS) 的基本组成部分,在实际高阶驾驶辅助应用中,考虑车道保持、转向、限速等相关的控制问题,这种方式通常是通过受限的车辆计算…

机器视觉与嵌入式技术:开拓自动驾驶和远程监控新视野
(本文为简单介绍,观点源于网络)
机器视觉系统是指利用计算机来模拟人眼的识别与判断。在自动驾驶和远程监控领域,机器视觉结合嵌入式技术的应用,不仅极大地提升了自动化水平,而且开辟了新的技术视野。
在…

自动驾驶中的 DCU、MCU、MPU、SOC 和汽车电子架构
自动驾驶中的 DCU、MCU、MPU 1. 分布式电子电气架构2. 域集中电子电气架构架构2.1 通用硬件定义 3. 车辆集中电子电气架构4. ADAS/AD系统方案演变进程梳理4.1 L0-L2级别的ADAS方案4.2 L2以上级别的ADAS方案 5. MCU和MPU区别5.1 MCU和MPU的区别5.2 CPU与SoC的区别5.3 举个例子 R…
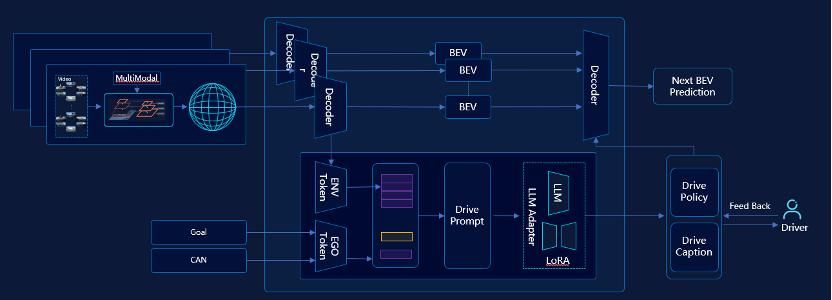
自动驾驶革命:解密端到端背后的数据、算力和AI奇迹
作者 |毫末智行数据智能科学家 贺翔
编辑 |祥威 最近,特斯拉FSD V12的发布引发了业界对端到端自动驾驶的热议,业界纷纷猜测FSD V12的强大能力是如何训练出来的。从马斯克的测试视频可以大致归纳一下FSD V12系统的一些核心特征:
训练数据&am…
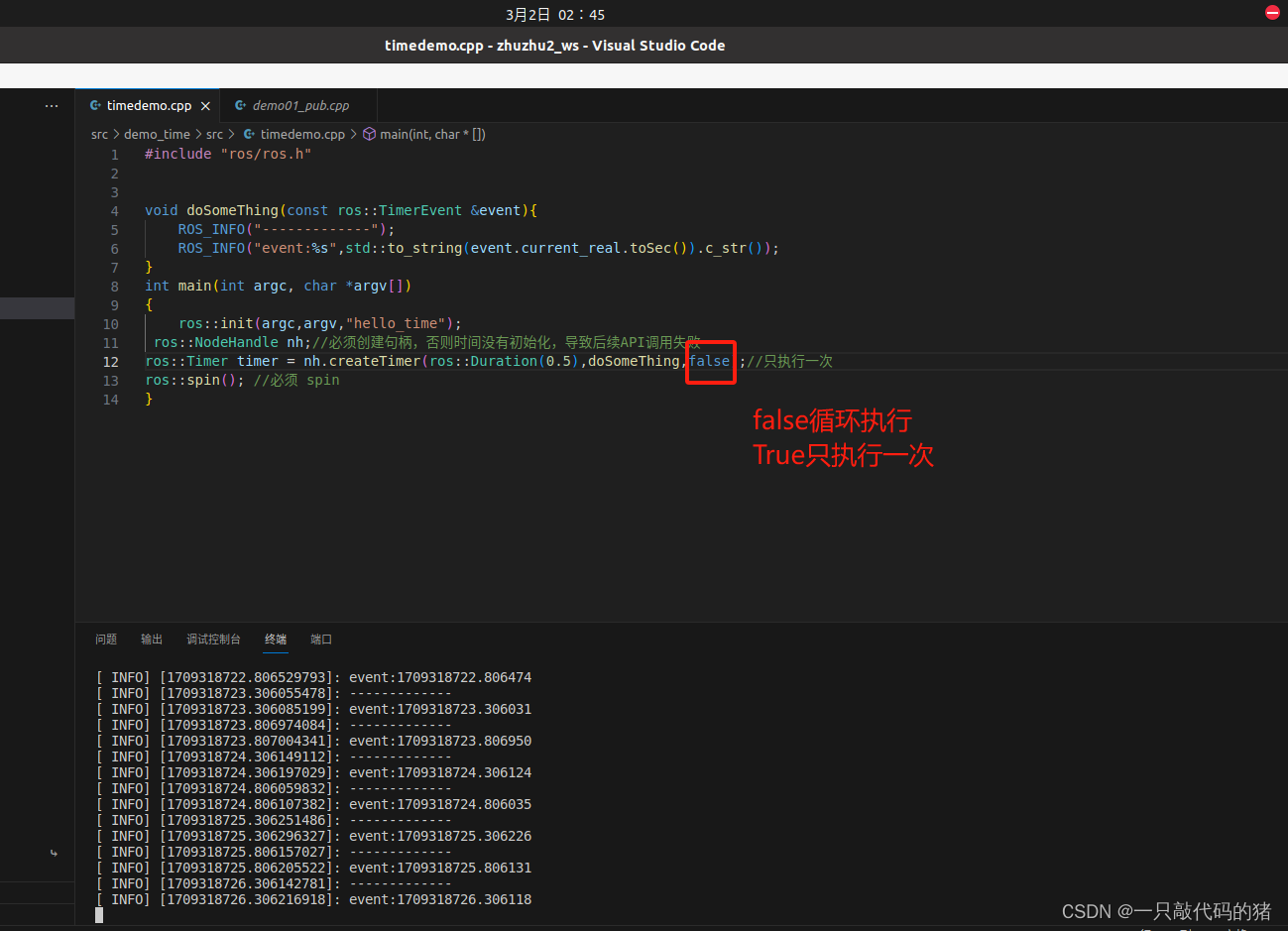
ROS中关于时间的API
目录
1.时刻
2.持续时间
3.持续时间与时刻运算
4.设置运行频率
5.定时器 下面是关于利用时间API的C代码,执行之前请记得创建功能包,在src文件夹下创建C文件
1.时刻
获取时刻&设置指定时刻
//获取时刻
ros::init(argc,argv,"hello_time&…
自动驾驶---Motion Planning之Speed Boundary(上)
1 背景 在上篇博客《自动驾驶---Motion Planning之Path Boundary》中,笔者主要介绍了path boundary的一些内容,通过将道路中感兴趣区域的动静态障碍物投影到车道坐标系中,用于确定L或者S的边界,并利用道路信息再确定Speed的边界,最后结合粗糙的速度曲线和路径曲线,即可使…

2022 Tesla AI Day -特斯拉自动驾驶FSD的进展和算法软件技术之数据以及虚拟
2022 Tesla AI Day -特斯拉自动驾驶FSD的进展和算法软件技术之数据以及虚拟 附赠自动驾驶学习资料和量产经验:链接
人工智能算法犹如电影的主演,我们很多时候看电影只看到主演们的精彩,但其实电影的创意和呈现都来自于背后的导演和制片等团队…

单摄像头、双目摄像头、多视图系统:了解自动驾驶汽车的传感器
1.鱼眼摄像机 其他摄像机的位置
2.激光雷达 3.Radar 4.sonar 声纳
各个传感器的对比 相机类型
一般来说,相机可以分为单目相机、双目相机和多视角相机。
单目相机:最常见的相机类型,只有一个镜头。双目相机:有两个镜头&…

谈一谈BEV和Transformer在自动驾驶中的应用
谈一谈BEV和Transformer在自动驾驶中的应用
BEV和Transformer都这么火,这次就聊一聊。 结尾有资料连接
一 BEV有什么用
首先,鸟瞰图并不能带来新的功能,对规控也没有什么额外的好处。
从鸟瞰图这个名词就可以看出来,本来摄像头…
自动驾驶汽车:计算机视觉的前沿应用
自动驾驶汽车:计算机视觉的前沿应用引言
自动驾驶汽车技术是近年来最引人注目的技术进步之一,它承诺将彻底改变我们的出行方式,提高道路安全,减少交通堵塞,并对环境产生积极影响。在自动驾驶汽车的核心技术中…
基于多模态脑机接口的智能小车自动驾驶系统
摘 要: 在传统的控制系统当中, 人们依赖于使用手柄、操纵杆等设备来与外部设备实现人机交互, 这对于具有运动障碍的患者来说是具有挑战的. 而脑机接口(BCI) 技术可通过脑环将脑电信号转化为对外界设备的控制命令, 使这些患者可以由大脑“意识”直接控制外部设备. 本文提出一种…

交通标志识别项目 | 基于Tensorflow+SSD实现道路交通标志识别
项目应用场景 面向智能驾驶或自动驾驶场景道路道路交通标志的识别,在交通标志识别的基础上为下一步的智能决策提供前提
项目效果: 项目细节 > 具体参见项目 README.md (1) 安装依赖 Python3.5、TensorFlow v0.12.0、Pickle、OpenCV-Python、Matplotl…
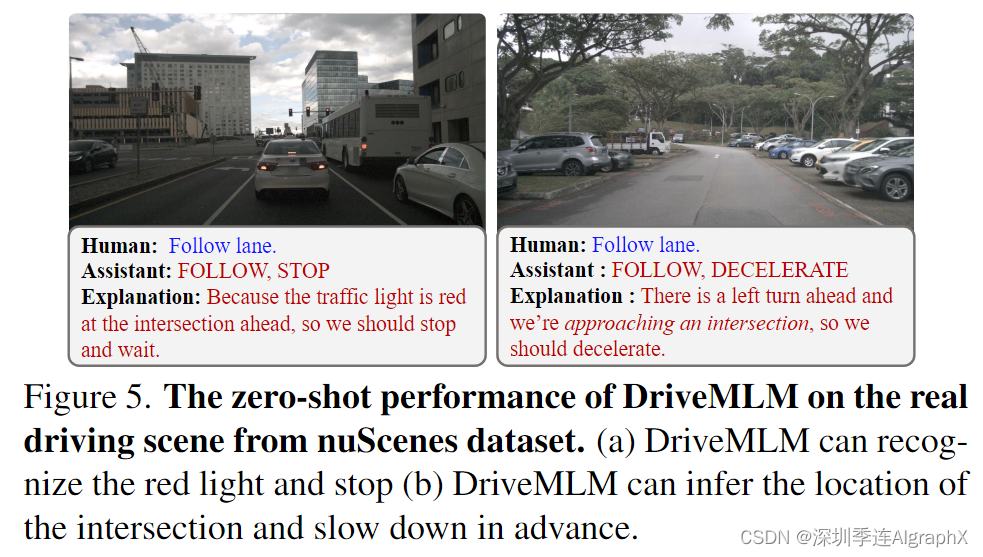
51-26 DriveMLM: 多模态大型语言模型与自动驾驶行为规划状态对齐
DriveMLM是来自上海AILab、港中文、商汤、斯坦福、南京大学和清华大学的工作。该模型使用各种传感器(如相机、激光雷达)、驾驶规则和用户指令作为输入,采用多模态LLM对AD系统的行为规划进行建模,做出驾驶决策并提供解释。该模型可以用于闭环自动驾驶&…
小米汽车上市进入倒计时,已开启内部试驾
在十四届全国人大二次会议上,全国人大代表、小米集团创始人、董事长CEO雷军回应了小米汽车的最新消息,小米汽车预计很快就要正式上市。
小米汽车推出了两款车型:SU7和SU7 Max。这两款车型均为纯电轿车,带来了不同的配置和性能特点…
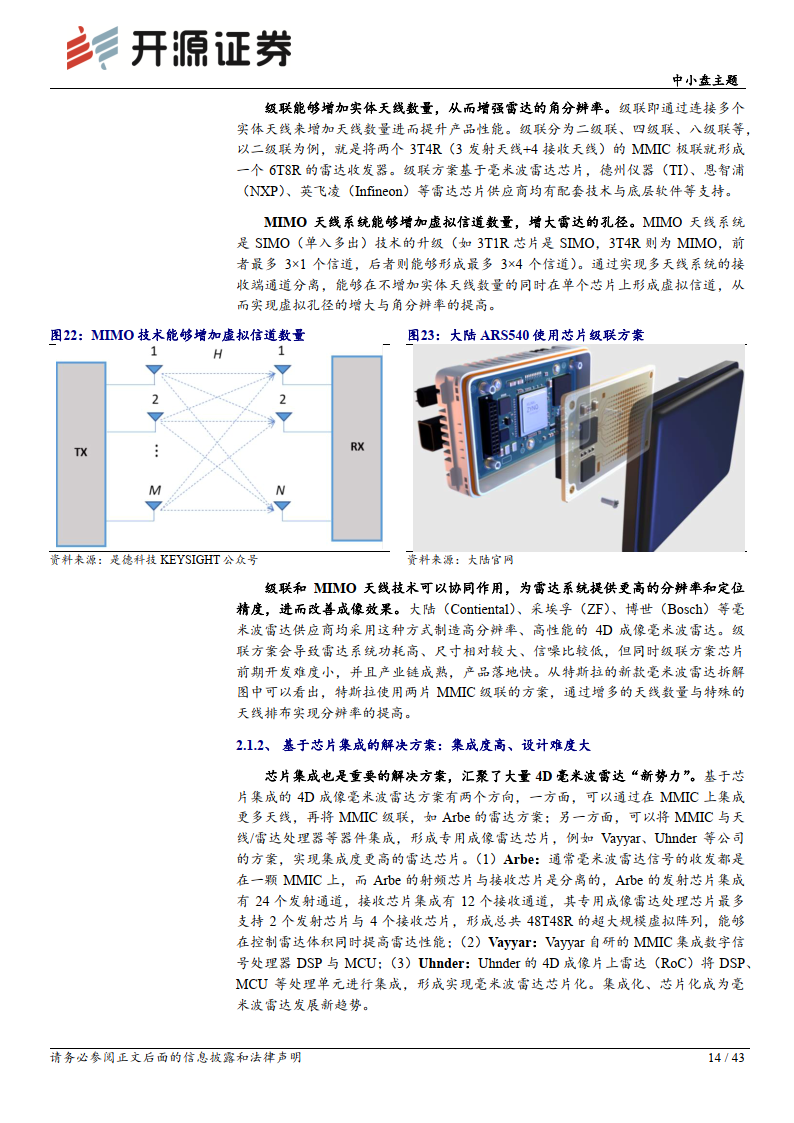
智能汽车行业产业研究报告:4D成像毫米波雷达—自动驾驶最佳辅助
今天分享的是智能汽车系列深度研究报告:《智能汽车行业产业研究报告:4D成像毫米波雷达—自动驾驶最佳辅助》。
(报告出品方:开源证券)
报告共计:43页 视觉感知最佳辅助——4D 成像毫米波雷达
感知是自动…
特斯拉掀起「端到端」风暴,自动驾驶持续开卷
作者 |三少爷
编辑 |祥威 最近,特斯拉向在美用户推送了版本号为V12.1.2 Beta的端到端FSD,版本推送后,海外的特斯拉车主和视频博主上传了一些测试视频,测评视频本身没有太多好说的,真正值得关注的是「端到端」。
自马…
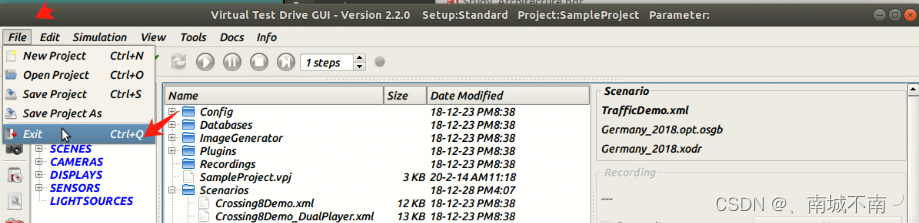
【基于Ubuntu20.04的Autoware.universe安装过程】方案一:虚拟机 | 详细记录 | Vmware | 全过程图文 by.Akaxi
目录
一、Autoware.universe背景
二、虚拟机配置
三、Ubuntu20.04安装
四、GPU显卡安装
五、ROS2-Galactic安装
六、ROS2-dev-tools安装
七、rmw-implementation安装
八、pacmod安装
九、autoware-core安装
十、autoware universe dependencies安装
十一、安装pre-c…

【自动驾驶基础入门】SLAM应该怎么学习?
1、SLAM是什么?
SLAM是Simultaneous Localization and Mapping的缩写,即同时定位与地图构建。也称为自主机器人导航或者无人车等领域的基本任务之一。 简单来说,SLAM是指在未知环境中,通过移动机器人并利用其搭载的各种传感器数据…
基于YOLO的自动驾驶目标检测研究综述
摘要:自动驾驶是人工智能发展领域的一个重要方向,拥有良好的发展前景,而实时准确的目标检测与识别是保证自动驾驶汽车安全稳定运行的基础与关键。回顾自动驾驶和目标检测技术的发展历程,综述了YOLO算法在车辆、行人、交通标志、灯光、车道线等目标检测上的应用,同时对比分…
【自动驾驶】Submap总结
大规模建图优化问题
使用图像或雷达扫描点云帧序列完成大规模三维重建,如城市规模三维重建,将全局环境地图分割为submap(子地图),“各个击破”——逐一优化每个子地图,并优化子地图间关联关系,…
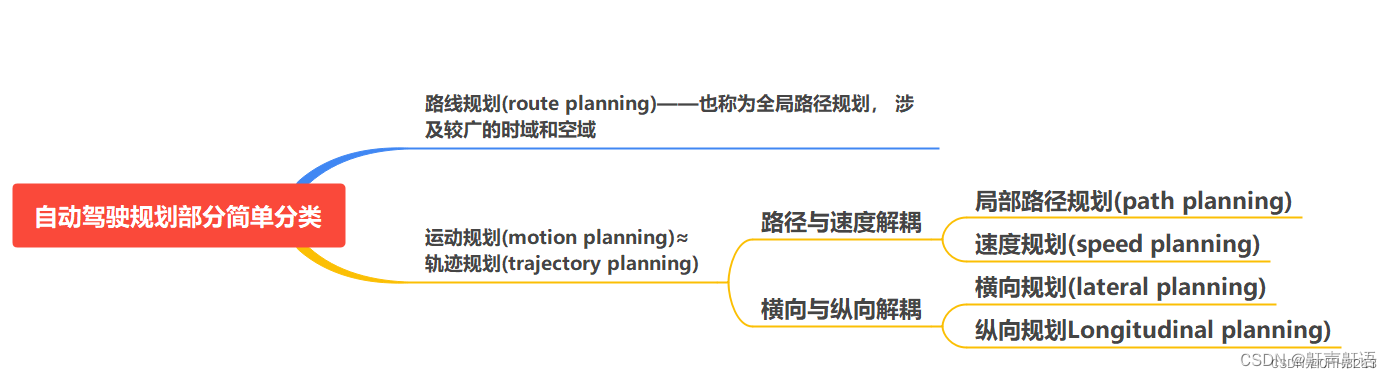
自动驾驶框架:自动驾驶汽车定位-感知-规划-决策-控制概述,按照我的架构图理解:决策决定的是速度,规划决定的是路径(架构理解推荐)
1.按照我的架构图理解:决策决定的是速度,规划决定的是路径
参考链接:【自动驾驶】运动规划丨速度规划丨自动驾驶速度规划及状态协调方法
2.下面是参考别人的理解:
自动驾驶汽车定位-感知-规划-决策-控制概述 规划-决策-控制知…
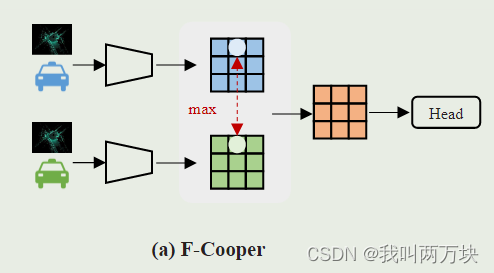
【代码解读】OpenCOOD框架之model模块(以PointPillarFCooper为例)
point_pillar_fcooper PointPillarFCooperPointPillarsPillarVFEPFNLayerPointPillarScatterBaseBEVBackboneDownsampleConvDoubleConv SpatialFusion检测头 (紧扣PointPillarFCooper的框架结构,一点一点看代码) PointPillarFCooper
# -*- c…
01.08 校招 实习 内推 面经
绿*泡*泡VX: neituijunsir 交流*裙 ,内推/实习/校招汇总表格 1、校招 | 航天电器2024校园招聘!
校招 | 航天电器2024校园招聘! 2、实习 | 一汽-大众2024冬季实习生招聘正式启动
实习 | 一汽-大众2024冬季实习生招聘正式启动 …
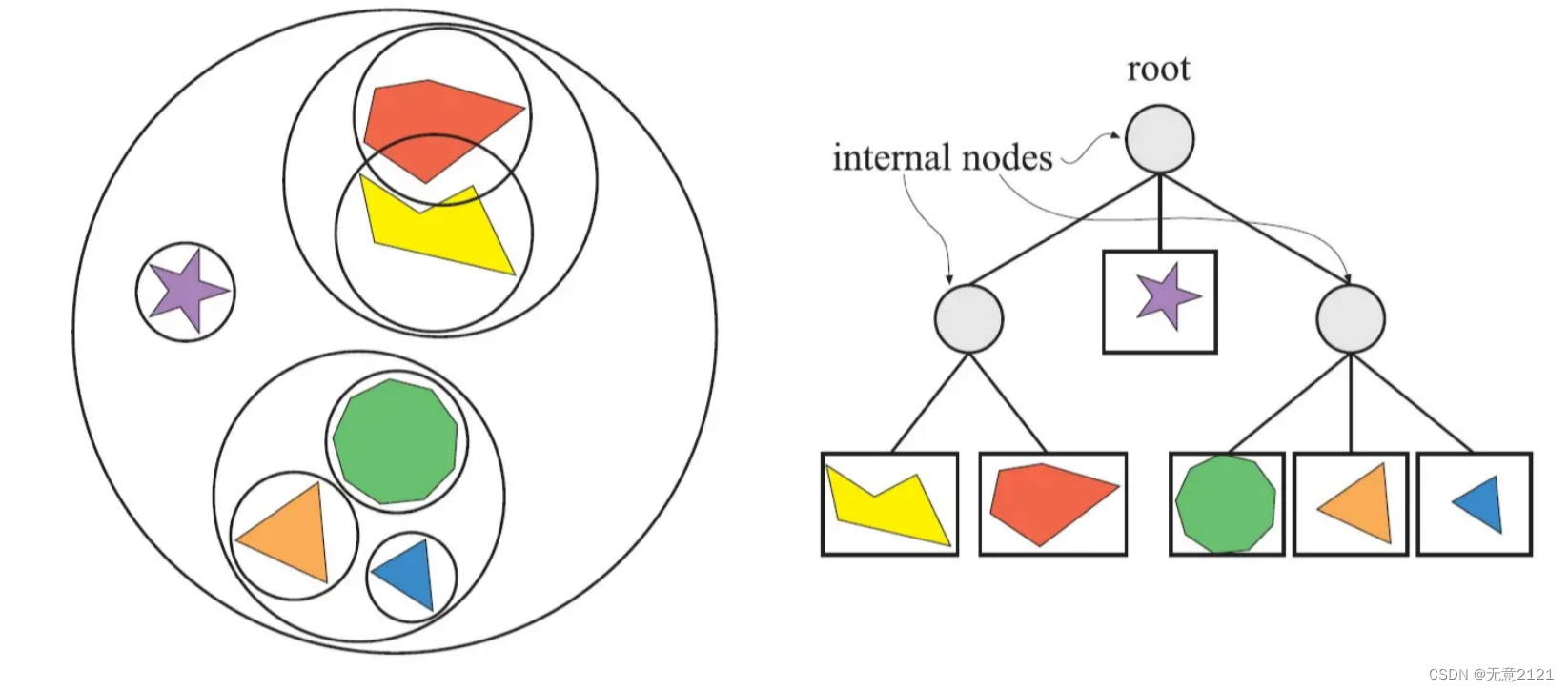
自动驾驶轨迹规划之碰撞检测(四)
欢迎大家关注我的B站:
偷吃薯片的Zheng同学的个人空间-偷吃薯片的Zheng同学个人主页-哔哩哔哩视频 (bilibili.com)
目录
1.基于圆覆盖
2.BVH 自动驾驶轨迹规划之碰撞检测(一)-CSDN博客
自动驾驶轨迹规划之碰撞检测(二&#x…

VINS-Mono 代码解析二、初始化 第3部分
【4】视觉/惯导联合初始化 为什么要初始化?答: 视觉系统只能获得二维信息,损失了一维信息(深度), 所以需要动一下,也就是三角化才能重新获得损失的深度信息;但是,这个三角化恢复的深度信息,是个…

ORB-SLAM2实践
1.环境搭建
ubuntu18.04下进行依赖库安装,流程大致如下,先有个大致认识: Pangolin----OpenCV----Eigen----ORB_SLAM2
Opencv及Eigen已安装,这里不重复记录,详见VINS-MONO实践
配置前需要下载cmake、gcc、g和Git工具…
51-29 开环端到端自动驾驶中自车状态是你所需要的一切吗?
本论文是南京大学、英伟达最新CVPR 24工作。蛮幸运的,该论文提出了很多思考,证明了很多最优Paper在落地上车方面的无效性。咱们对待新方法能否成为自动驾驶的最佳实践要审慎。
论文名称:Is Ego Status All You Need for Open-Loop End-to-End Autonomous Driving? 论文链…
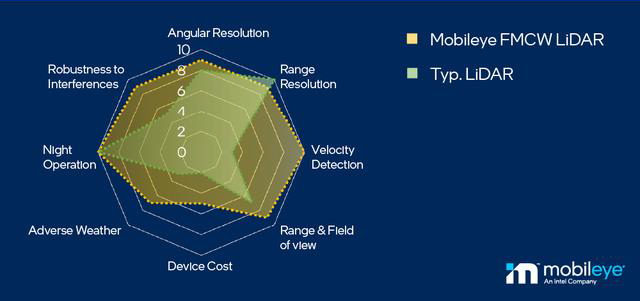
自动驾驶加速落地,激光雷达放量可期(上)
1 激光雷达应用广泛,汽车有望成最大催化 激光雷达(LiDAR)是一种主动遥感技术,通过测定传感器发出的激光在传感器与目标物体之间的传播距离,来分析目标地物表面的反射能量大小、反射波谱的幅度、频率和相位等信息&#…

(02)Cartographer源码无死角解析-(19) SensorBridge→雷达点云数据帧处理与坐标系变换(涉及函数重载)
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 …

(01)ORB-SLAM2源码无死角解析-(06) 图像金字塔_ORB特征点
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
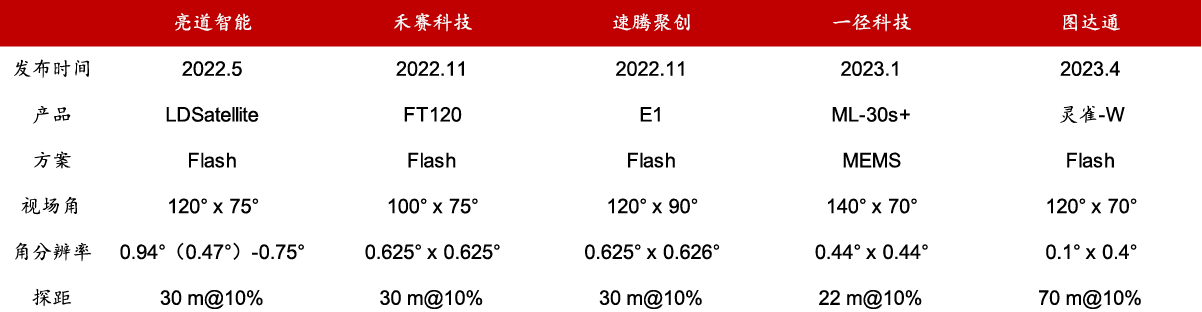
自动驾驶加速落地,激光雷达放量可期(下)
3 下游应用加速渗透,激光雷达出货提升
3.1 远期展望百亿美金市场,伴随自动驾驶快速成长 激光雷达是自动驾驶系统中一项关键技术,近年全球智能网联汽车产业进入加速发展新阶段,推动着激光雷达市场规模高速增长。2022 年全球激光雷…
多模态3D目标检测-自动驾驶
【ECCV2022】|动态快读的多模态3D目标检测框架 | AutoAlignV2: Deformable Feature Aggregation for Dynamic Multi-Modal 3D Object Detection|论文链接|代码链接 【ECCV2022】|同质多模态数据融合和交互用于3D目标检测 | Homogeneous Multi-modal Feature Fusion and Interac…

AGV搬运机器人能给企业带来哪些效益?
agv 当前物流行业正在以每年40%的速度快速增长,却依然是典型的劳动密集型行业。随着机器人技术的崛起,传统物流行业也开始加大对物流科技设备的研发。AGV机器人被广泛应用于整个仓储系统内,疏解了一部分人力的负担,使后台工作更加…

智能汽车软硬件产品CES展示汽车技术新亮点
智能汽车是汽车产业发展的新趋势,是未来汽车发展的必然方向。智能汽车是指搭载了先进的传感器、控制器、执行器等部件,并融合了人工智能、自动驾驶等技术,能够实现部分或完全自动驾驶、智能网联等功能的汽车。
近年来,智能汽车技…
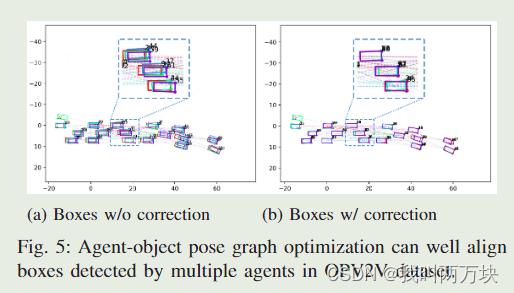
【论文解读】Robust Collaborative 3D Object Detection in Presence of Pose Errors
CoAlign 摘要引言方法实验结论 摘要
协同3D对象检测利用多个代理之间的信息交换,以在存在诸如遮挡之类的传感器损伤的情况下提高对象检测的准确性。然而,在实践中,由于定位不完善而导致的姿态估计误差会导致空间消息错位,并显著降…
SLAM面试代码题:点云去畸变
题目
假设已知一帧点云每个点的时间戳和它的位姿,要求对点云去畸变
解题思路 定义一个点云的struct利用时间戳,把一帧内每个时刻的点云都变换到这一帧的起始时间处位置使用线性插值,旋转使用球面非线性插值// 点云去畸变
#include <iostream>
#include <Eigen/Co…
01.13 校招 实习 内推 面经
绿*泡*泡VX: neituijunsir 交流*裙 ,内推/实习/校招汇总表格 1、校招 | 诺瓦星云2024届春招提前启动!
校招 | 诺瓦星云2024届春招提前启动! 2、校招 | 中国电信云计算研究院2024届校园招聘正式启动!
校招 | 中国电…
Unity3D外包 北京动点软件:基于U3D开发自动驾驶技术分析
在Unity3D中开发自动驾驶AI是一个充满挑战和潜力的领域。以下是一些关键步骤和考虑因素:
来百度APP畅享高清图片
1. 创建虚拟环境: 使用Unity3D创建一个逼真的虚拟环境,模拟现实世界的道路、交通标志、车辆和障碍物等。 确保场景具有真实的…
【Apollo】阿波罗自动驾驶:塑造自动驾驶技术的未来
前言 Apollo (阿波罗)是一个开放的、完整的、安全的平台,将帮助汽车行业及自动驾驶领域的合作伙伴结合车辆和硬件系统,快速搭建一套属于自己的自动驾驶系统。 开放能力、共享资源、加速创新、持续共赢是 Apollo 开放平台的口号。百度把自己所拥有的强大、…
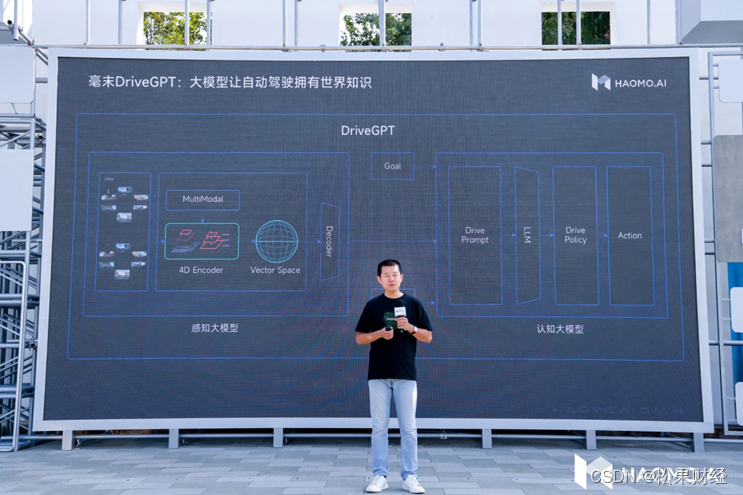
毫末智行开年融资,揭幕了自动驾驶最后的赛点
毫末智行日前官宣拿到的超亿元B1轮融资,在行业引起了不小的关注。
一方面是信心问题,自动驾驶从早期拼技术到去年拼量产落地,创业公司们的声量此消彼长,有人领先也有人掉队,但市场的态度都以谨慎为主,甚至…
2024.2.4 校招 实习 内推 面经
绿*泡*泡VX: neituijunsir 交流*裙 ,内推/实习/校招汇总表格 1、校招 | OPPO 2024届春招 研发类岗位专场(内推)
校招 | OPPO 2024届春招 研发类岗位专场(内推) 2、校招 | 中电智能科技有限公司2024校园…
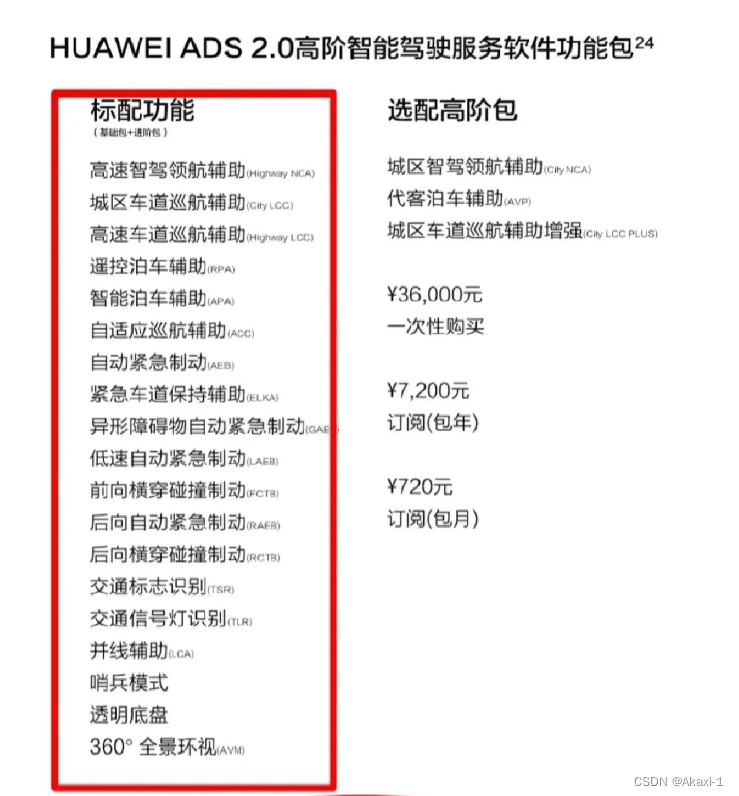
【自动驾驶技术系列丛书学习】1.《自动驾驶技术概论》学习笔记
《自动驾驶技术概论》学习笔记 致谢:作者:王建、徐国艳、陈竞凯、冯宗宝
本书主要介绍汽车构造和无人驾驶汽车的基本概念,从基础开始,由浅入深地了解无人驾驶的历史由来、国内外自动驾驶产业现状及技术发展、自动驾驶汽车的技术架…
【自动驾驶地图】OpenDrive协议总结(上)
文章目录 通用架构文件结构合并文件文件中使用的属性通用规则与假设 附加数据用户数据包含数据使用不同布局类型数据质量描述 坐标系参考线坐标系地理坐标系 几何道路参考线 ASAM OpenDrive协议描述静态道路交通网络,采用了XML标准交换格式;与ASAM OpenC…

MIT-BEVFusion系列九--CUDA-BEVFusion部署6 前向推理的数据加载与图像预处理
目录 加载图像数据加载点云数据模型推理并计时预热操作模型推理检查点云输入数据量打印信息中CopyLidar部分的计算和耗时打印信息中ImageNrom图像预处理部分计算和耗时 该系列文章与qwe、Dorothea一同创作,喜欢的话不妨点个赞。 接上面的文章,目光聚焦回…

自动驾驶预测与决策规划(nuplan数据集)
欢迎大家关注我的B站:
偷吃薯片的Zheng同学的个人空间-偷吃薯片的Zheng同学个人主页-哔哩哔哩视频 (bilibili.com)
目录
1.概述
2 数据采集
3.开环与闭环仿真
4.数据注释
5.场景
6.规划框架
6.1Train
6.2Simulation
6.3Metric
6.4Visualization
7.下载…
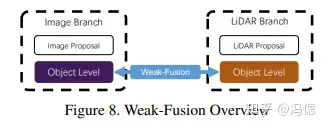
自动驾驶-如何进行多传感器的融合
自动驾驶-如何进行多传感器的融合 附赠自动驾驶学习资料和量产经验:链接
引言
自动驾驶中主要使用的感知传感器是摄像头和激光雷达,这两种模态的数据都可以进行目标检测和语义分割并用于自动驾驶中,但是如果只使用单一的传感器进行上述工作…

虹科方案丨自动驾驶多传感器数据融合方法
文章来源:雅名特自动驾驶 点此阅读原文:https://mp.weixin.qq.com/s/QsPMWZDGZaPdEx47L2VmeA 近年来,深度学习技术在涉及高维非结构化数据领域展现出了最先进的性能,如计算机视觉、语音、自然语言处理等方面,并且开始涉…

《探索自动驾驶技术的前景与挑战》
自动驾驶技术,作为现代科技的一大突破,正逐渐改变着我们的交通方式、生活方式以及整个社会结构。本文将围绕自动驾驶技术的现状、优势、局限性以及未来发展趋势展开探讨。
自动驾驶技术的现状概述 自动驾驶技术作为当今科技领域的一项前沿技术,已经取得了巨大的进展并在不同…

【自动驾驶系列丛书学习】2.《自动驾驶汽车环境感知》学习笔记
《自动驾驶技术概论》学习笔记 致谢:作者:甄先通、黄坚、王亮、夏添
--------------------------------------------------------------------------------------------------------
笔记目录 -----------------------------------------------------…
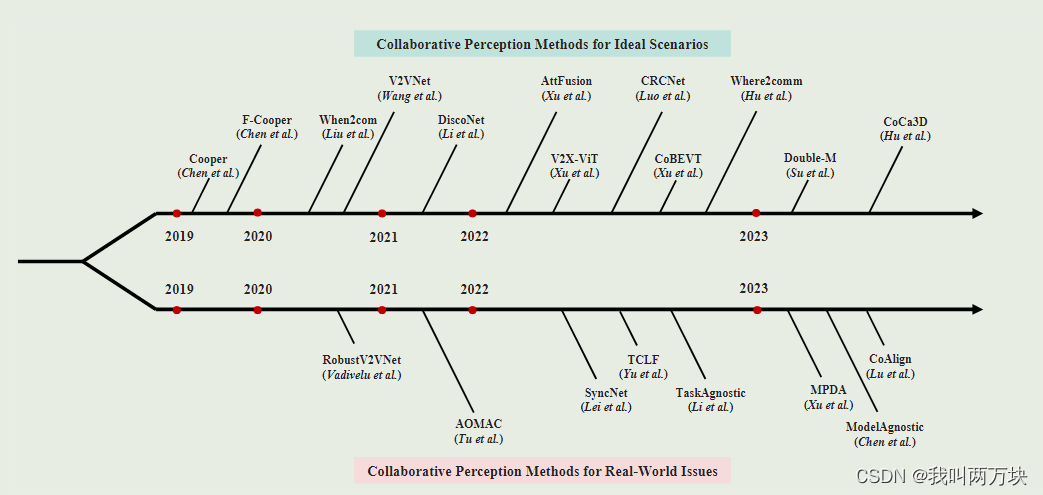
【论文整理】自动驾驶场景中Collaborative Methods多智能体协同感知文章创新点整理
Collaborative Methods F-CooperV2VNetWhen2commDiscoNetAttFusionV2X-ViTCRCNetCoBERTWhere2commDouble-MCoCa3D 这篇文章主要想整理一下,根据时间顺序这些文章是怎么说明自己的创新点的,又是怎么说明自己的文章比别的文章优越的。显然似乎很多文章只是…
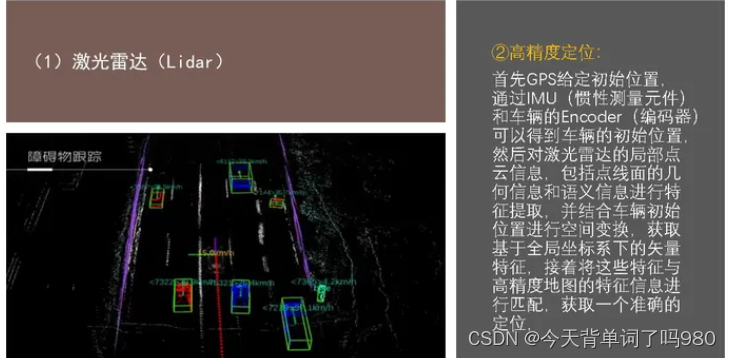
从新能源汽车行业自动驾驶技术去看AI的发展未来趋势
自动驾驶汽车关键技术主要包括环境感知、精准定位、决策与规划、控制与执行、高精地图与车联网V2X以及自动驾驶汽车测试与验证技术等。 🐓 自动驾驶技术 这是AI在汽车行业中应用最广泛的领域之一。自动驾驶技术利用AI算法和传感器来感知环境、识别障碍物,…
自动驾驶到底需要多少个传感器?
由于传感器的成本从15美元到1美元不等,汽车制造商想知道车辆完全自动驾驶需要多少传感器。 这些传感器用于收集有关周围环境的数据,它们包括图像、激光雷达、雷达、超声波和热传感器。一种类型的传感器是不够的,因为每种传感器都有其局限性。…
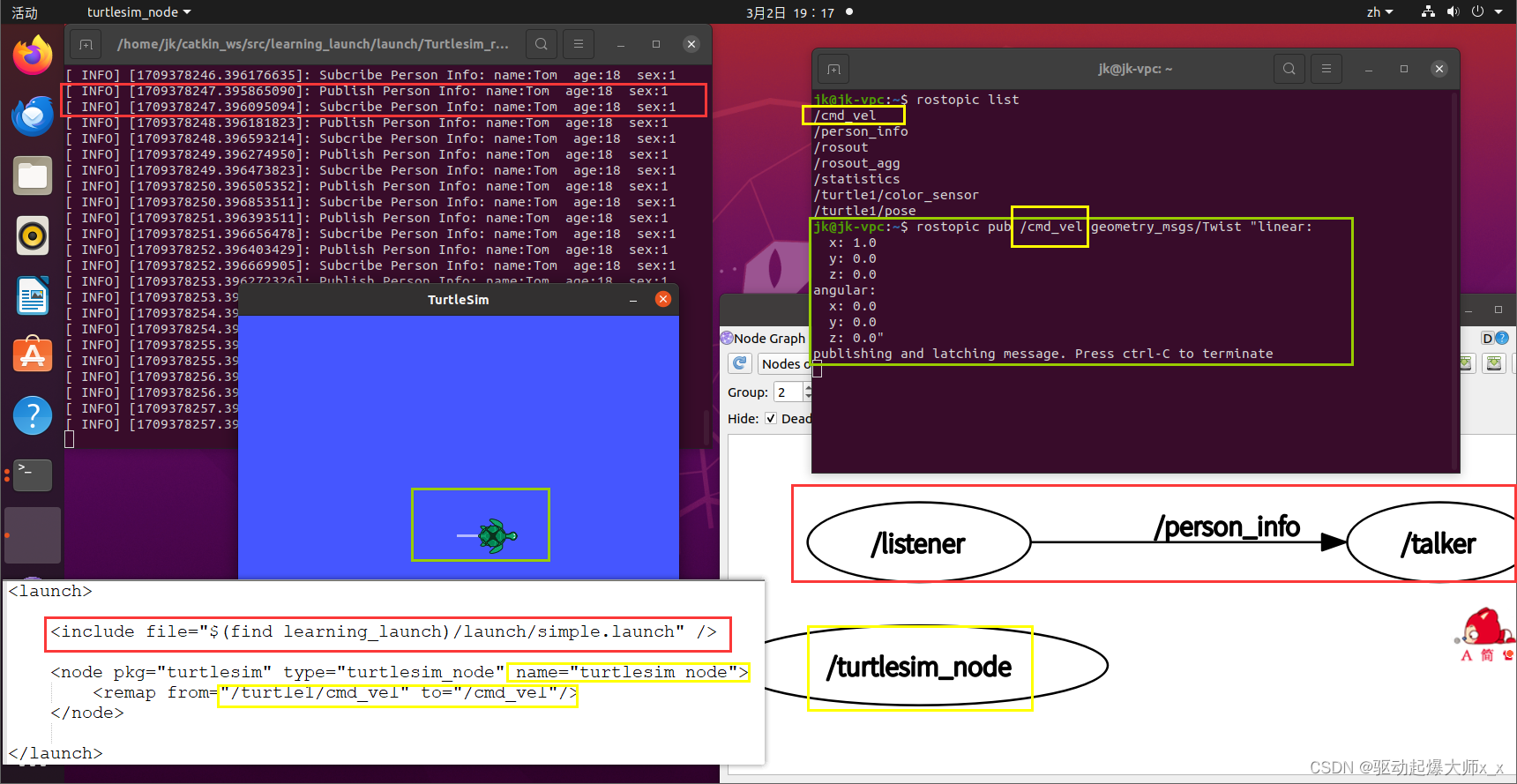
《Ubuntu20.04环境下的ROS学习笔记13》
一、launch文件的使用方法 在之前的章节中我们在最后运行代码的时候都需要启动多个终端,而本节中我们将使用launch文件一种通过xml文件格式实现多节点的配置和启动。 二、launch文件的语法
1、在launch中单行、多行表示和注释
<launch><!-- 这是一个注释…
2024.2.2校招 实习 内推 面经
绿*泡*泡VX: neituijunsir 交流*裙 ,内推/实习/校招汇总表格 1、校招&实习&社招 | 虹软AI算法类校招&实习岗位招聘(内推)
校招&实习&社招 | 虹软AI算法类校招&实习岗位招聘(内推ÿ…
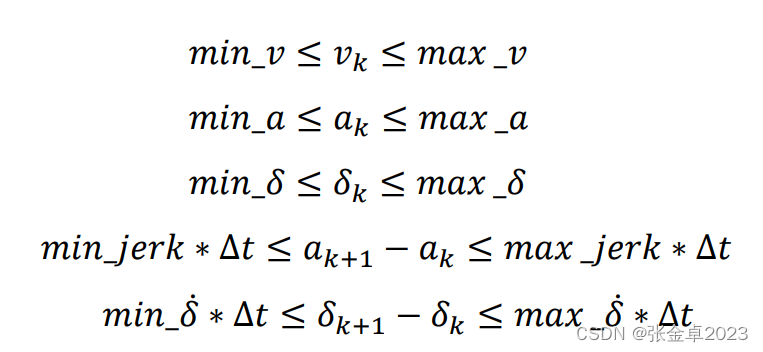
智能驾驶规划控制理论学习08-自动驾驶控制模块(轨迹跟踪)
目录
一、基于几何的轨迹跟踪方法
1、基本思想
2、纯追踪
3、Stanly Method
二、PID控制器
三、LQR(Linear Quadratic Regulator)
1、基本思想
2、LQR解法
3、案例学习
基于LQR的路径跟踪 基于LQR的速度跟踪 4、MPC(Mode…

【运动规划算法项目实战】如何使用Pure Pursuit算法进行路径跟踪(附ROS C++代码)
文章目录 前言一、简介二、Pure Pursuit算法优缺点三、 代码实现3.1 算法实现步骤3.2 pure_pursuit.h3.3 pure_pursuit.cpp3.4 cubic_spline_path.py3.5 节点连接关系3.6 RVIZ显示四、总结前言
在自动驾驶和机器人导航领域,路径跟踪是一项关键技术,它使车辆或机器人能够按照…
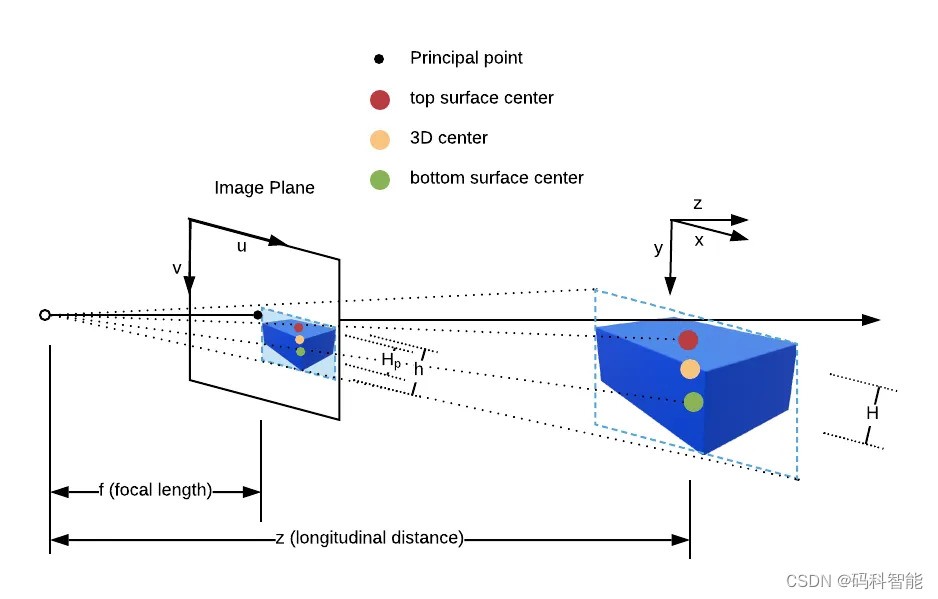
【单目3D】在自动驾驶中将 2D 物体检测提升到 3D
Lifting 2D object detection to 3D in autonomous driving
单目 3D 目标检测使用 RGB 图像来预测目标 3D 边界框。由于 RGB 图像中缺少关键的深度信息,因此该任务从根本上说是不适定的。然而在自动驾驶中,汽车是具有(大部分)已知…
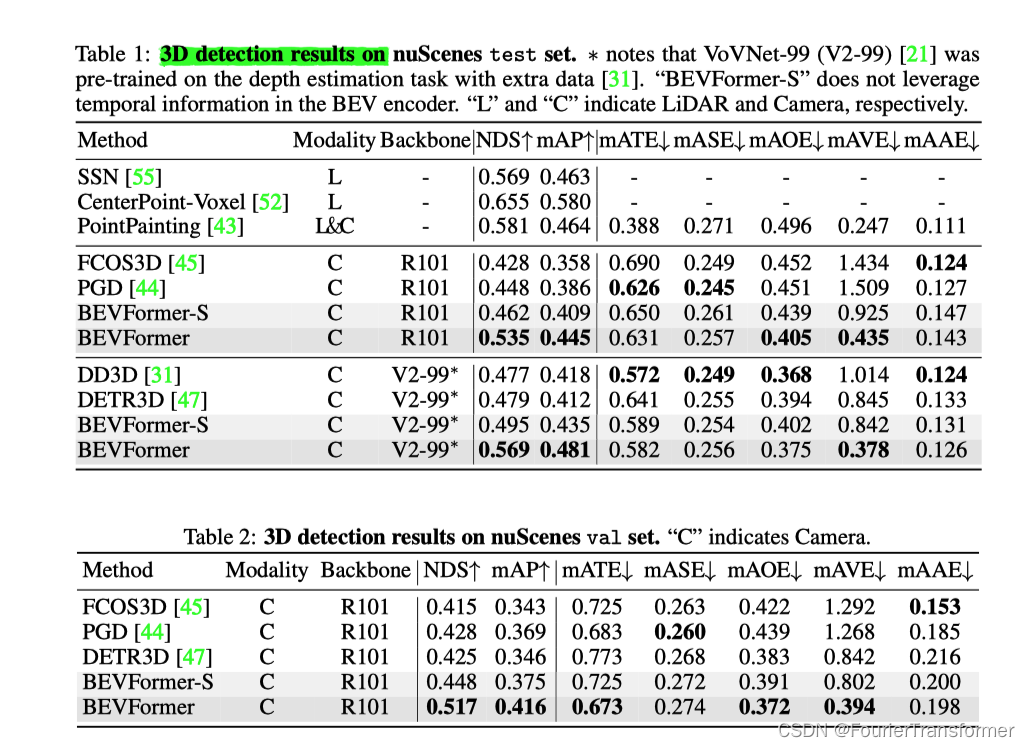
BEVFormer组件分析
BEVFormerEncoder中的get_reference_points staticmethoddef get_reference_points(H, W, Z8, num_points_in_pillar4, dim3d, bs1, devicecuda, dtypetorch.float):"""Get the reference points used in SCA and TSA.Args:H, W: spatial shape of bev.Z: hight…

Bidirectional Attention Network
欢迎访问我的博客首页。 BANet1. Sub-Pixel Convolutional2. BANet 网络2.1 全局上下文聚合 D2S modules2.2 双向注意力模型3. 总结4. 参考这篇文章来自华为在加拿大的诺亚方舟实验室。
1. Sub-Pixel Convolutional Sub-Pixel Convolutional 由推特 2016 年提出,用…
(02)Cartographer源码无死角解析-(00)目录_最新无死角讲解
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(02)Cartographer源码无死角解析链接如下(有兴趣的朋友可关注计算机视觉life 进行学习): (02)Cartographer源码无死角解析-(00)目录_最新无死角讲解:https://mp.csdn.net/mp_blo…

ORB_SLAM2 源码解析 ORB_SLAM2简介(一)
目录 一、ORB_SLAM2的特点
二、算法流程框架
ORB-SLAM整体流程如下图所示
a、跟踪(Tracking)
b、建图(LocalMapping)
c、闭环检测(LoopClosing)
三、安装教程
1、克隆仓库
2、编译ORB-SLAM2&…
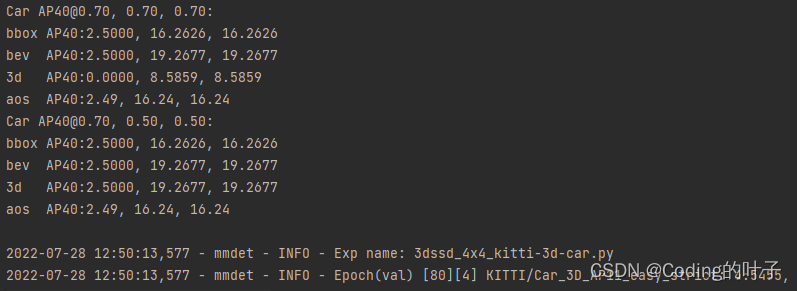
【三维目标检测】3DSSD(二)
数据和源码请参考上一篇博文:【三维目标检测】3DSSD(一)_Coding的叶子的博客-CSDN博客。 3DSSD三维目标检测模型发表在CVPR2020《3DSSD: Point-based 3D Single Stage Object Detector》。目前,基于体素的 3D 单级检测器已经有很多…
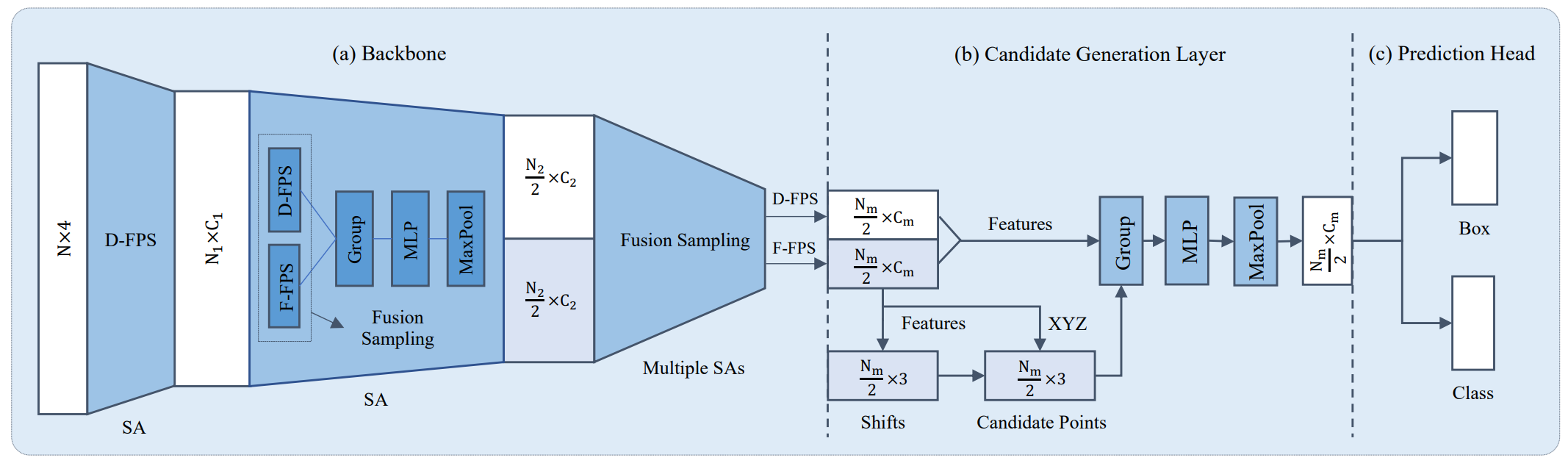
【三维目标检测】3DSSD(一)
3DSSD三维目标检测模型发表在CVPR2020《3DSSD: Point-based 3D Single Stage Object Detector》。目前,基于体素的 3D 单级检测器已经有很多种,而基于点的单级检测方法仍处于探索阶段。3DSSD是一种轻量级且有效的基于点的 3D 单级目标检测器,…
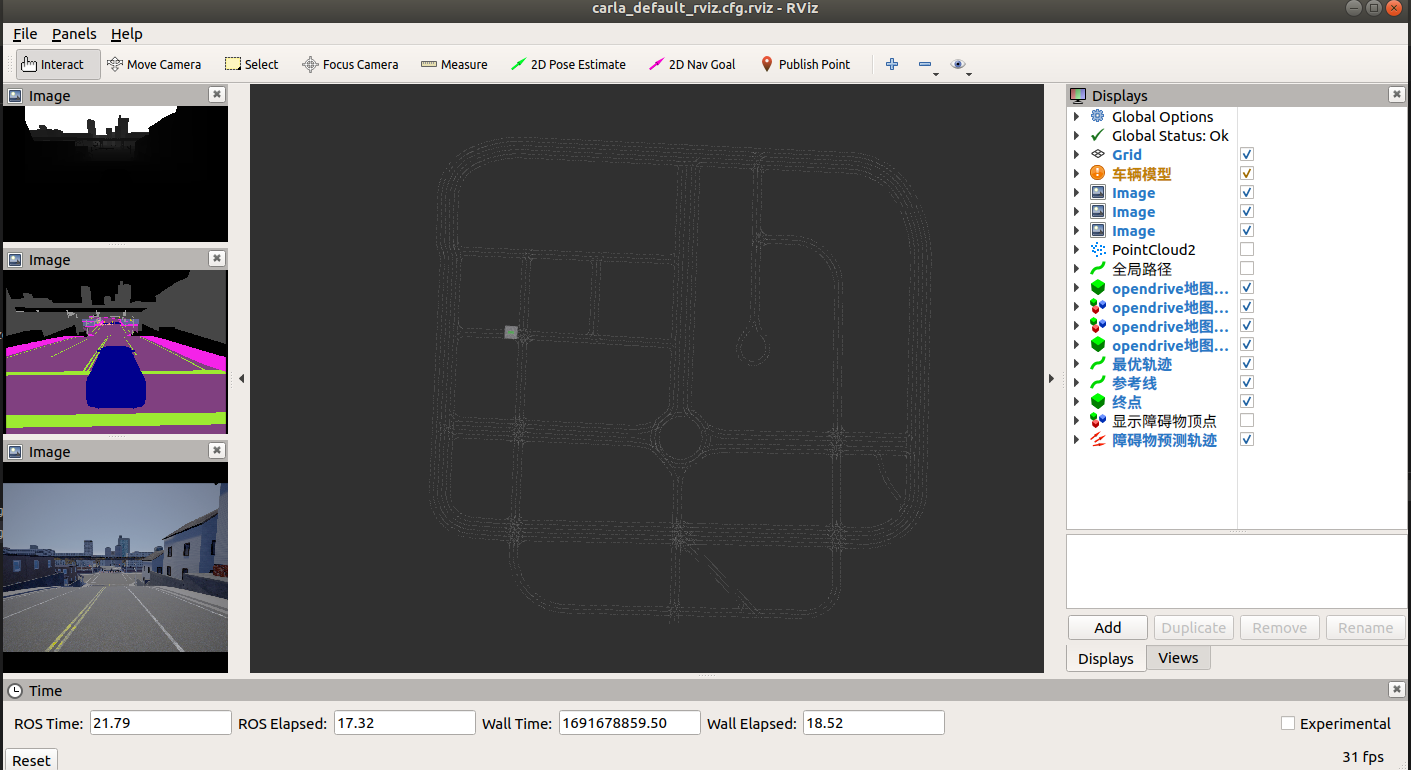
Ubuntu18.04使用carla0.9.5联合仿真搭环境报错
Ubuntu18.04使用工程与carla0.9.5联合仿真报错
1
File "/home/cg/Auto_driving/src/ros-bridge/carla_ros_bridge/src/carla_ros_bridge/client.py", line 18, in <module>from carla_ros_bridge.bridge_with_rosbag import CarlaRosBridgeWithBagFile "…
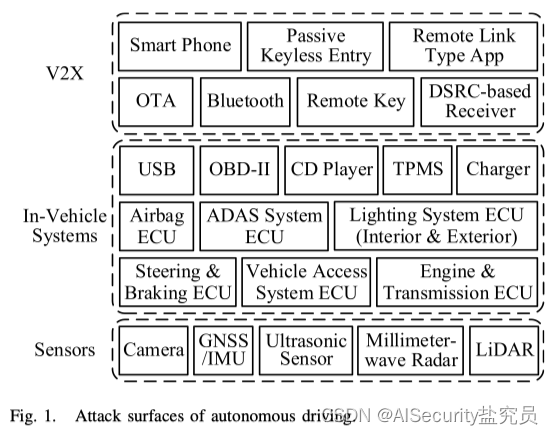
【论文阅读】自动驾驶安全的研究现状与挑战
文章目录 摘要1.引言1.1.自动驾驶安全1.2.攻击面1.3.内容和路线图 2.自动驾驶技术2.1.组成2.2.技术 3.传感器安全3.1.照相机3.2.GNSS(全球导航系统)/IMU(惯性测量单元)3.3.超声波传感器3.4.毫米波雷达3.5.激光雷达3.6.多传感器交叉…
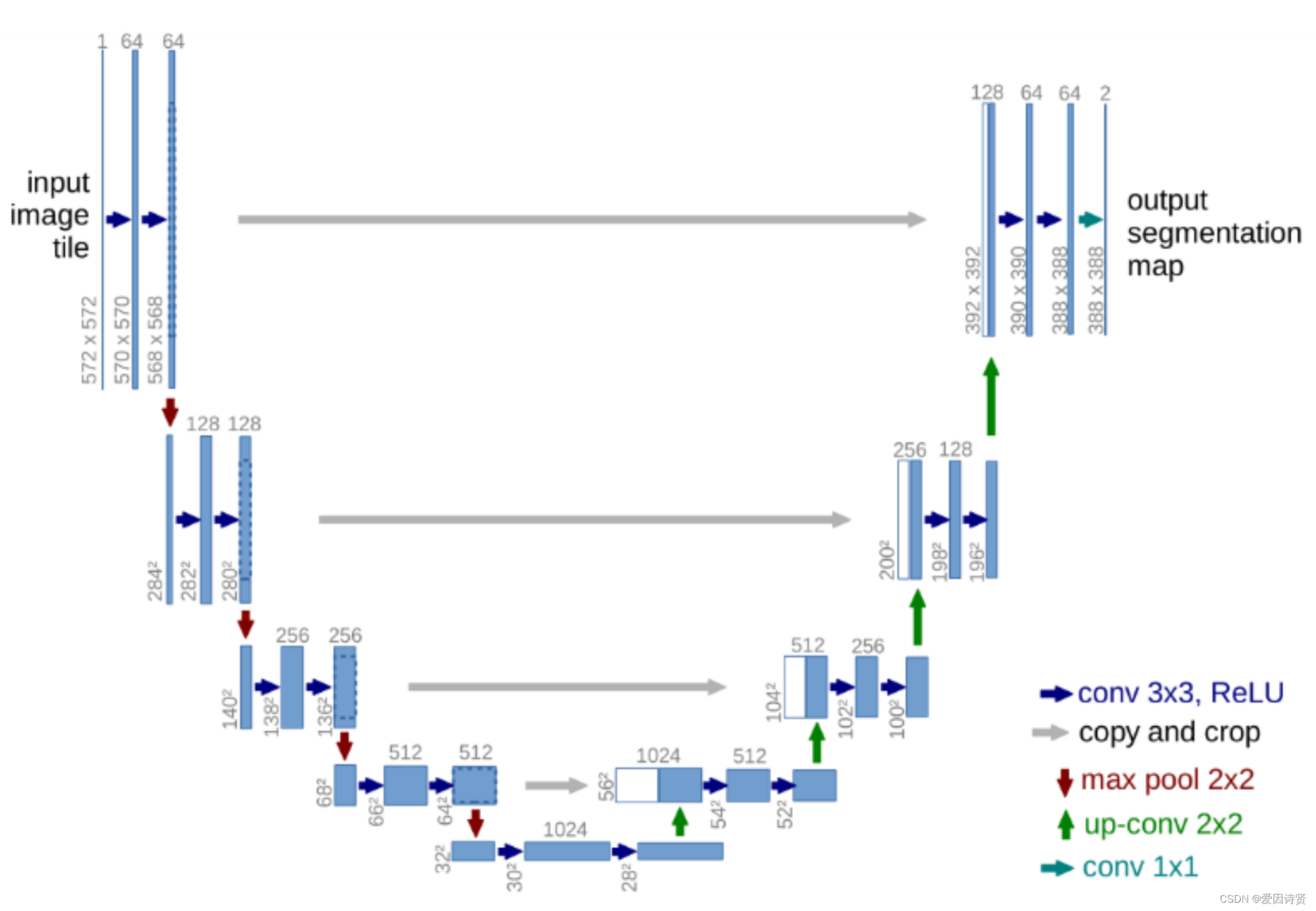
基于Vgg-Unet模型自动驾驶场景检测
1.VGG
VGG全称是Visual Geometry Group属于牛津大学科学工程系,其发布了一些列以VGG开头的卷积网络模型,可以应用在人脸识别、图像分类等方面,VGG的输入被设置为大小为224x244的RGB图像。为训练集图像上的所有图像计算平均RGB值,然后将该图像…
9.16 校招 实习 内推 面经
绿泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格
1、校招 | 极智嘉2024届全球校园招聘正式启动(内推)
校招 | 极智嘉2024届全球校园招聘正式启动(内推) 2、校招 | 2024年上汽集团校园招募行动全…
10.5 校招 实习 内推 面经
绿泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格
1、校招 | 爱博医疗机器人2024校园招聘
校招 | 爱博医疗机器人2024校园招聘 2、校招 | 2024术锐机器人校园招聘火热进行中
校招 | 2024术锐机器人校园招聘火热进行中 3、校招 | 康诺思腾202…
辅助驾驶功能开发-功能对标篇(6)-NOA领航辅助系统-上汽智己
1.横向对标参数 厂商上汽智己车型L7LS7上市时间20222022Q4方案11V5R1L+1DMS11V5R2L+1DMS摄像头前视摄像头2*(5M,长焦+广角)3侧视摄像头44后视摄像头11环视摄像头44DMS摄像头11雷达毫米波雷达554D毫米波雷达//超声波雷达1212激光雷达1*(速腾聚创M1,125线,905nm)2(速腾聚创)域控供…

【Apollo】感知工程安装测试
安装基础软件
安装Linux - Ubuntu
安装 Ubuntu 操作系统,请参见官方安装指南。 注意:推荐您使用 Ubuntu 18.04.5 或以上的版本作为您主机的操作系统,若采用18.04版本可使用:Ubuntu 18.04.5 LTS (Bionic Beaver) Ubuntu系统安装完…
10.15 校招 实习 内推 面经
绿*泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格
1、自动驾驶一周资讯 -何小鹏:和大众集团联合开发车型已加速推进;理想汽车战略会智能驾驶被提到空前高度;滴滴自动驾驶再获广汽集团投资
自动驾驶一周资讯…
(02)Cartographer源码无死角解析-(20) MapBuilder→MapBuilder()构造函数
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文 末 正 下 方 中 心 提…
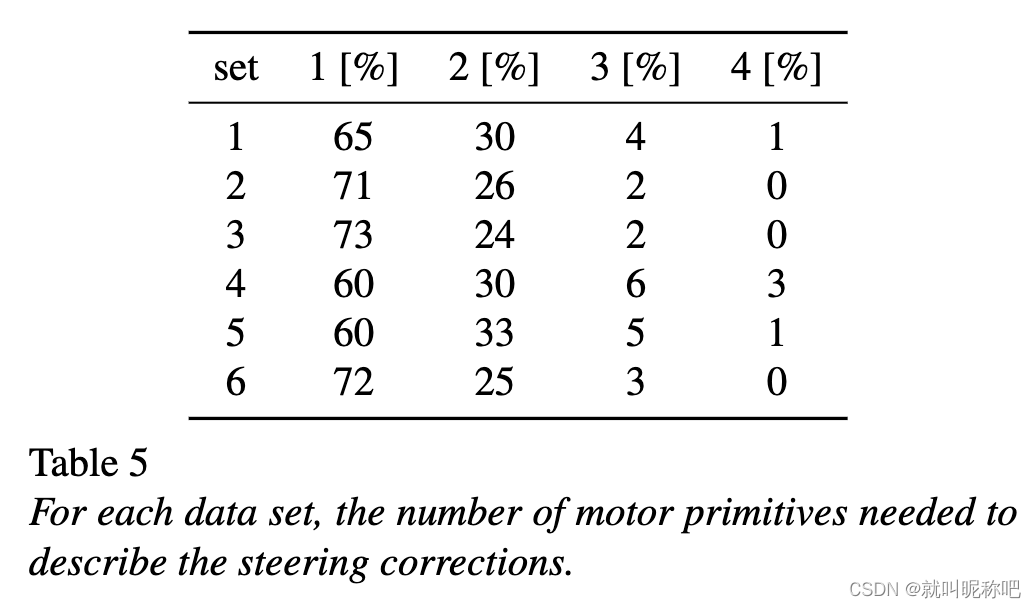
论文阅读:《Evidence for a fundamental property of steering》
文章目录1 背景2 方法2.1 方向盘修正行为标识2.2 数据2.3 数据拟合3 结果3.1 速率曲线3.2 恒定的转向时间3.3 基本运动元素的叠加3.4 其他实验4 讨论5 总结(个人)1 背景 这篇短文的主要目的是去阐述“转方向盘”这一行为的基本性质:方向盘修正…
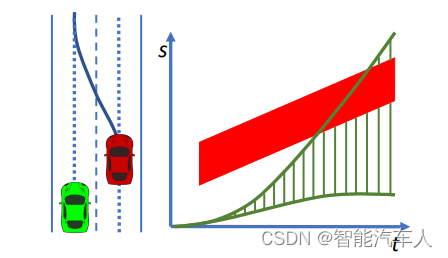
自动驾驶---Motion Planning之轨迹Speed优化
1 背景 在之前的几篇文章中,不管是通过构建SL图《自动驾驶---Motion Planning之Path Boundary》,ST图《自动驾驶---Motion Planning之Speed Boundary》,又或者是构建SLT图《自动驾驶---Motion Planning之构建SLT Driving Corridor》ÿ…
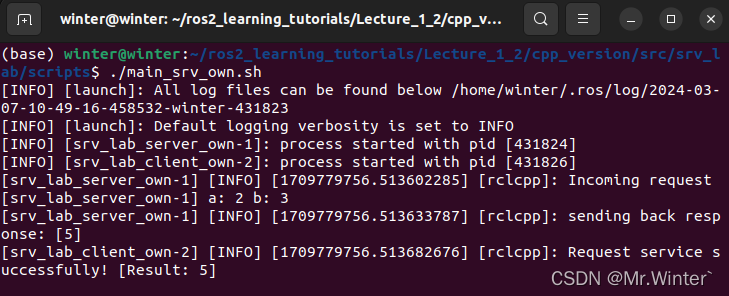
ROS2从入门到精通1-2:详解ROS2服务通信机制与自定义服务
目录 0 专栏介绍1 服务通信模型2 服务模型实现(C)3 服务模型实现(Python)4 自定义服务5 话题、服务通信的异同 0 专栏介绍
本专栏旨在通过对ROS2的系统学习,掌握ROS2底层基本分布式原理,并具有机器人建模和应用ROS2进行实际项目的开发和调试的工程能力。…
从智能驾驶全技术供应链看智能驾驶“灵魂”
从智能驾驶全技术供应链看智能驾驶“灵魂”
附赠自动驾驶学习资料和量产经验:链接
智能驾驶主机厂与技术供应链的灵魂之争伴随着智能驾驶技术兴起而来,也伴随着技术供应链的繁荣虽然嘴上很少提起但是行动却很雷厉,首先是扛起民族大旗的华为…
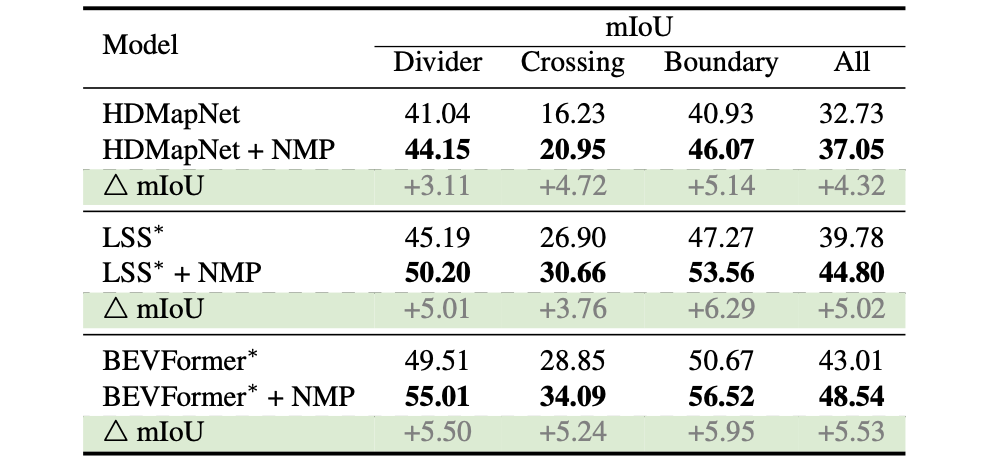
NMP:Neural Map Prior for Autonomous Driving
参考代码:neural_map_prior
动机与出发点
在车端仅依靠自身传感器的感知结果经常是不稳定且错误比较多,则可在此基础上添加辅助信息来优化感知结果,这里使用的是全局BEV特征(城市级别)来做优化。也就是利用车端感知网…

AGV无人驾驶跨境运输新模式引领未来物流
agv AGV即“自动导引运输车”,这一概念起源于欧美,在欧美及日韩市场的发展比较成熟,于上世纪末被引入国内。这种自动导引运输车可以广泛应用于汽车、化工、医药以及食品饮料等制造业场景,以及机场、码头等仓储物流行业场景&#x…

自动驾驶传感器:传感的本质
自动驾驶传感器:传感的本质 附赠自动驾驶学习资料和量产经验:链接
0. 前言
这个系列的背景是:工作时候需要攒一台数据采集车辆,那段时间需要熟悉感知硬件,写了不少笔记,都是些冗长的文章,感兴…
人工智能时代过失犯理论的挑战与应对—以自动驾驶汽车交通肇事为例
内容提要以自动驾驶汽车为代表的人工智能产品致害所涉犯罪主体复杂多样、前置性规范缺失, 以及人工智能产品固有的自主与黑箱特性等问题给过失犯理论带来了变革的压力与挑战。传统过失犯理论、新过失犯理论以及客观归责理论都无法解决人工智能产品致害所涉过失犯罪认定问题。人…
无人自动驾驶技术研发中具有重要性
Python在无人自动驾驶技术研发中具有重要性。以下是几个关键原因: 简洁易用:Python是一种简洁易用的编程语言,具有良好的可读性和简单的语法,使得开发人员能够快速构建和调试无人自动驾驶系统。 大量库和框架:Python拥…
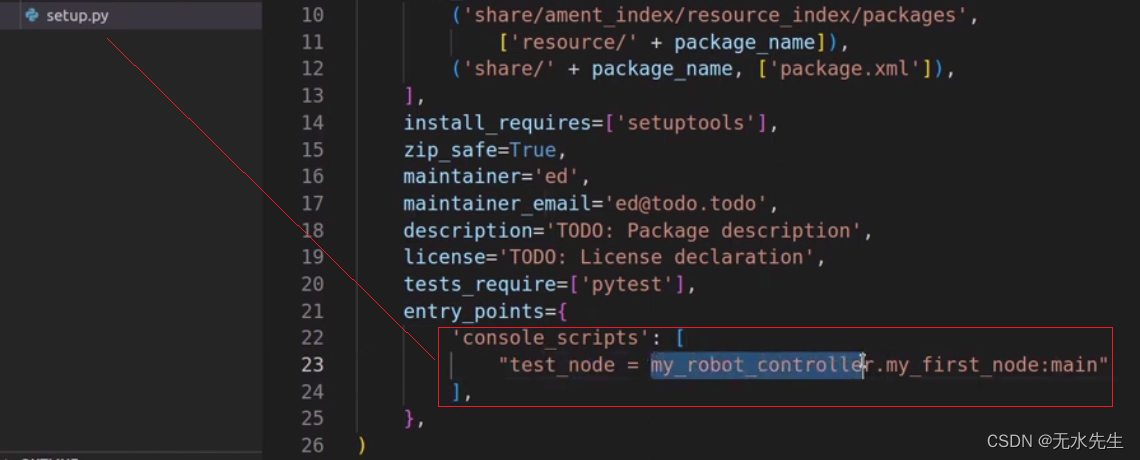
【ROS2知识】关于colcon编译和ament指定
一、说明 这里说说编译和包生成的操作要点,以python包为例。对于初学者来说,colcon和ament需要概念上搞清楚,与此同时,工作空间、包、节点在一个工程中需要熟练掌握。本文以humble版的ROS2,进行python编程的实现。 二、…
【CenterFusion】模型的创建、导入、保存CenterFusion/src/lib/model/model.py
文件内容:CenterFusion/src/lib/model/model.py 文件作用:模型的创建、导入、保存
model.py 具体内容如下:
from __future__ import absolute_import
from __future__ import division
from __future__ import print_functionimport torchv…

华为汽车业务迎关键节点,长安深蓝加入HI模式,车BU预计今年扭亏
编辑 |HiEV 一年之前,同样是在电动汽车百人会的论坛上,余承东在外界对于华为和AITO的质疑声中,第一次公开阐释了华为选择走智选车模式的逻辑。
一年之后,伴随问界M7改款、问界M9上市,华为智选车模式的面貌已经发生了…
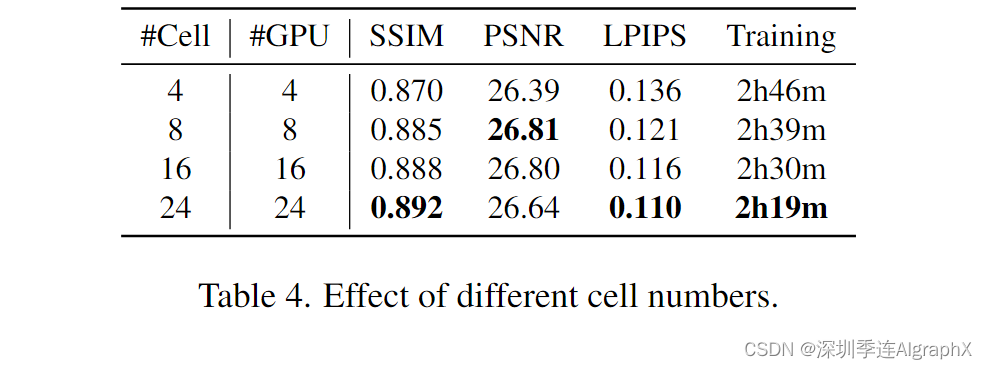
51-31 CVPR’24 | VastGaussian,3D高斯大型场景重建
2024 年 2 月,清华大学、华为和中科院联合发布的 VastGaussian 模型,实现了基于 3D Gaussian Splatting 进行大型场景高保真重建和实时渲染。
Abstract
现有基于NeRF大型场景重建方法,往往在视觉质量和渲染速度方面存在局限性。虽然最近 3D…
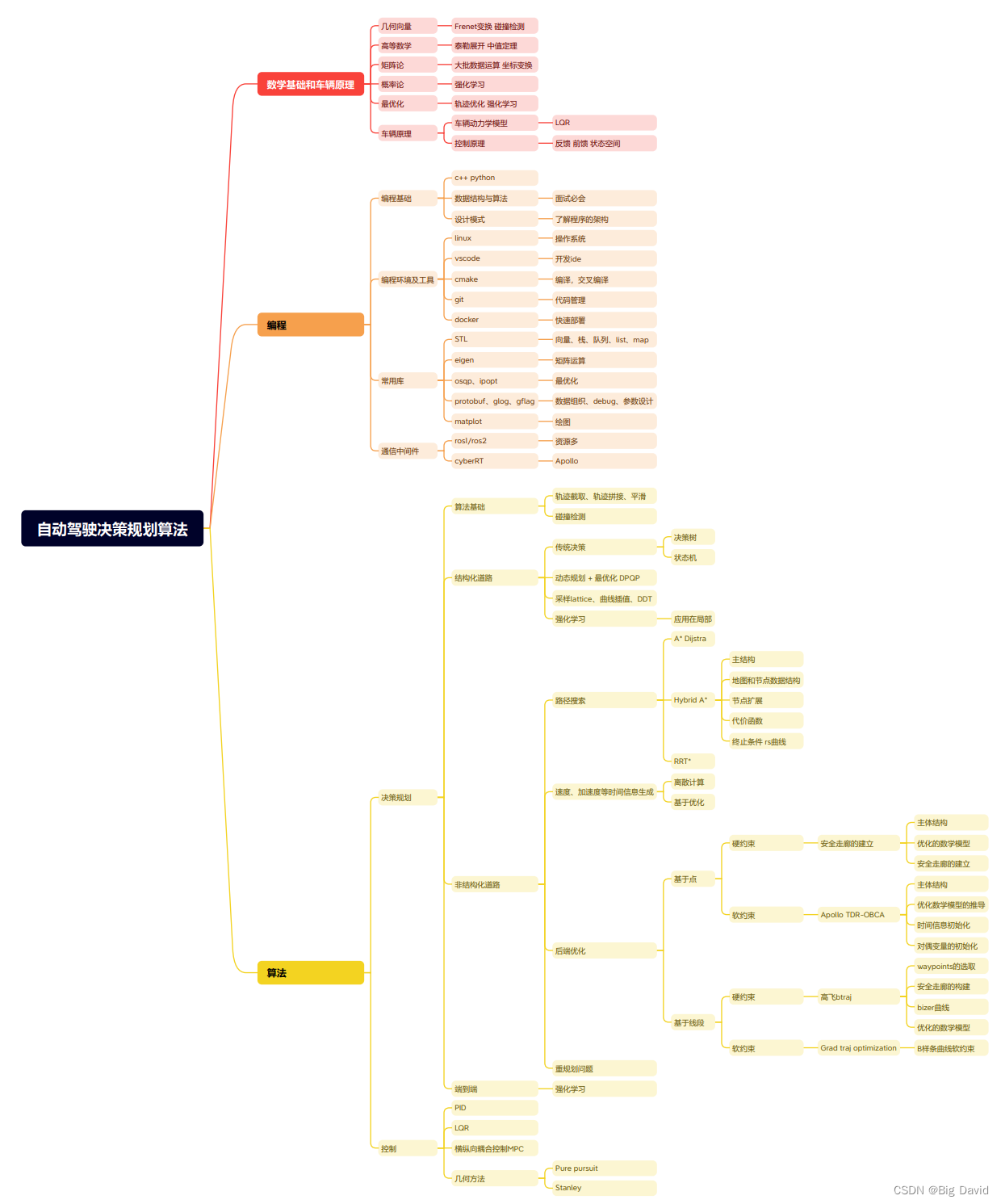
自动驾驶决策 - 规划 - 控制 (持续更新!!!)
总目录 Frenet与Cartesian坐标系
Apollo基础 - Frenet坐标系
车辆模型
车辆运动学和动力学模型
控制算法
PID控制器轨迹跟随实现 Pure Pursuit控制器路径跟随 路径跟踪算法Stanley 实现 c 无人驾驶LQR控制算法 c 实现 MPC自动驾驶横向控制算法实现 c 双环PID控制详细讲解 …

自动驾驶感知新范式——BEV感知经典论文总结和对比(一)
自动驾驶感知新范式——BEV感知经典论文总结和对比(一)
博主之前的博客大多围绕自动驾驶视觉感知中的视觉深度估计(depth estimation)展开,包括单目针孔、单目鱼眼、环视针孔、环视鱼眼等,目标是只依赖于视…
2024.3.7 校招 实习 内推 面经
绿*泡*泡VX: neituijunsir 交流*裙 ,内推/实习/校招汇总表格 1、校招 | 百度智能驾驶事业群组2024春季补录进行中(内推)
校招 | 百度智能驾驶事业群组2024春季补录进行中(内推) 2、校招 | 德赛西威 202…

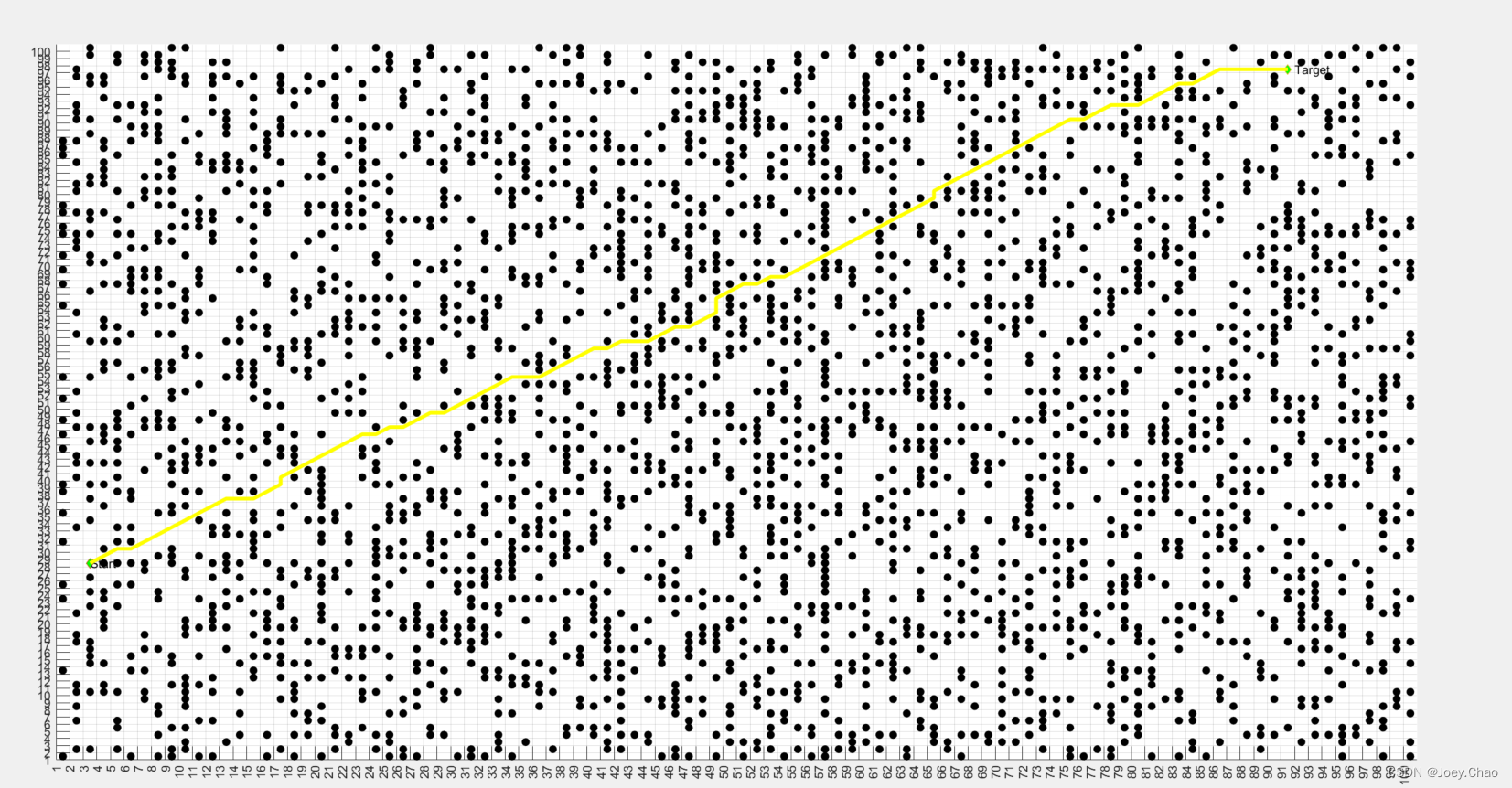
无人驾驶(移动机器人)路径规划之A star(Tie Breaker)算法及其matlab实现
在自动驾驶与移动机器人路径规划时,必定会用到经典的算法A star。下面是我未加入与加入Tie Breaker 的matlab实现效果。可以发现加入Tie Breaker之后效果明显改善。
目录
一、效果比较
1.未加入Tie Breaker(黑色为障碍物,菱形绿色为目标点…
gl-opendrive插件(车俩3D仿真模拟自动驾驶)
简介
本插件基于免费opendrive开源插件、Threejs和Webgl三维技术、vue前端框架,blender开源建模工具等进行二次开发。该插件由本人独立开发以及负责,目前处于demo阶段,功能还需待完善,由于开发仓促代码还需优化。
因此ÿ…
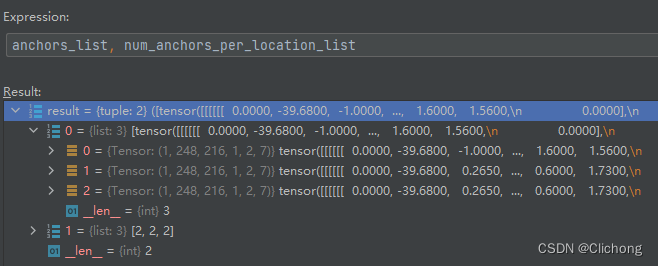
OpenPCDet系列 | 5.4.1 DenseHead中的AnchorGenerator锚框生成模块
文章目录 AnchorGenerator模块AnchorGenerator.generate_anchors函数 AnchorGenerator模块
首先,根据点云场景将其划分为一个个grid,这个grid size是可以通过配置文件设定的点云场景方位和voxel大小计算出来的。
POINT_CLOUD_RANGE: [0, -39.68, -3, 6…
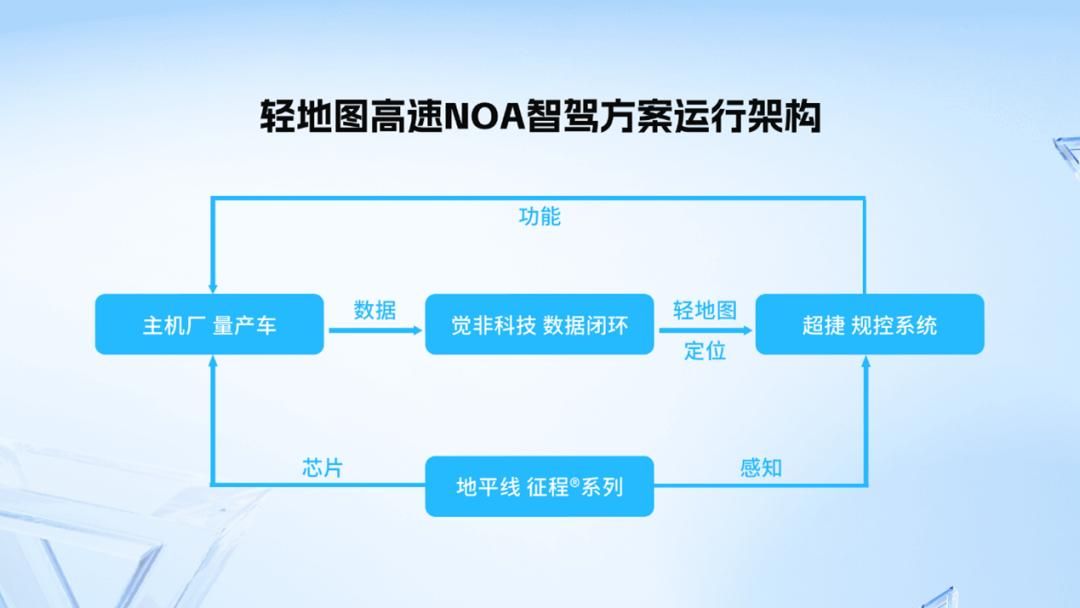
轻地图+数据闭环加速落地,觉非科技获多家头部车企定点
作者 |张祥威
编辑 |德新 智能驾驶日益普及,「轻地图」和「数据闭环」成为各家能力比拼的关键,车企对此的需求也逐渐迫切。
11月16日,觉非科技宣布已与多家头部主机厂达成量产定点合作,围绕轻地图与数据闭环服务,支…

Autoware 安装(踩坑指南)
Autoware 安装(踩坑指南) 【Autoware】2小时安装Autoware1.13(保姆级教程) Autoware入门学习(二)——Ubuntu18.04下的源码安装和配置 上面的两篇博客安装都异常顺利,甚至没有一点报错࿰…
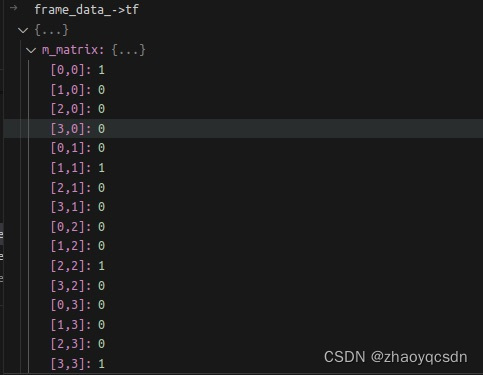
使用vscode debug 查看eigen变量的方法
设置成适合人看的格式
在使用eigen库的时候,有时候需要使用调试功能。但是没有设置之前,eigen变量的显示是这样的:不是人眼能看的格式 设置方法:
$ mkdir -p ~/gdbExtensions下载 https://gitlab.com/libeigen/eigen/-/blob/ma…
OCS2 入门教程(四)- 机器人示例
系列文章目录 前言 OCS2 包含多个机器人示例。我们在此简要讨论每个示例的主要特点。 System State Dim. Input Dim. Constrained Caching Double Integrator 2 1 No No Cartpole 4 1 Yes No Ballbot 10 3 No No Quadrotor 12 4 No No Mobile Manipul…
自动驾驶HWP的功能定义
一、功能定义
高速路自动驾驶功能HWP是指在一般畅通高速公路或城市快速路上驾驶员可以放开双手双脚,同时注意力可在较长时间内从驾驶环境中转移,做一些诸如看手机、接电话、看风景等活动,该系统最低工作速度为60kph。 如上两种不同环境和速度…

无人驾驶实战-第十一课(控制理论)
在七月算法上报了《无人驾驶实战》课程,老师讲的真好。好记性不如烂笔头,记录一下学习内容。 课程入口,感兴趣的也可以跟着学一下。
—————————————————————————————————————————
无人驾驶中控制系…
【Apollo】阿波罗自动驾驶技术:引领汽车行业革新
前言 Apollo (阿波罗)是一个开放的、完整的、安全的平台,将帮助汽车行业及自动驾驶领域的合作伙伴结合车辆和硬件系统,快速搭建一套属于自己的自动驾驶系统。 开放能力、共享资源、加速创新、持续共赢是 Apollo 开放平台的口号。百度把自己所拥有的强大、…

GTSAM 中的鲁棒噪声模型与 M-估计 (GTSAM Robust Noise Model and M-Estimator)
Title: GTSAM 中的鲁棒噪声模型与 M-估计 (GTSAM Robust Noise Model and M-Estimator) 文章目录 前言I. 噪声模型II. 鲁棒回归 —— M 估计1. 线性回归2. 损失函数3. 加权最小二乘 III. 鲁棒噪声模型1. 鲁棒目标函数2. 非线性加权最小二乘3. 迭代重加权最小二乘法 V. 总结参考…
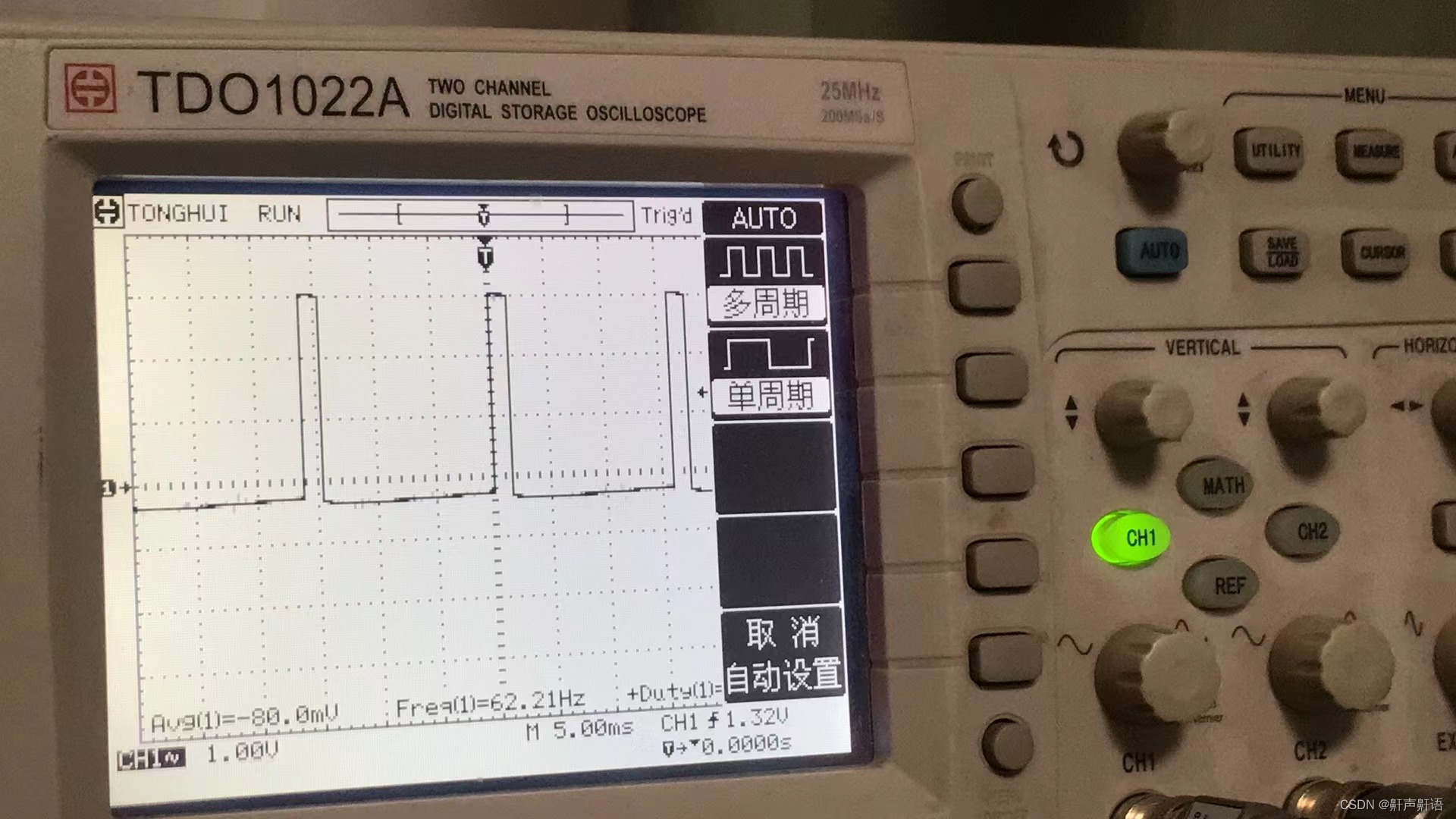

Carla自动驾驶仿真九:车辆变道路径规划
文章目录 前言一、关键函数二、完整代码效果 前言
本文介绍一种在carla中比较简单的变道路径规划方法,主要核心是调用carla的GlobalRoutePlanner模块和PID控制模块实现变道,大体的框架如下图所示。 一、关键函数
1、get_spawn_point(),该函数根据指定r…

大模型产业落地,安全运营能否迎来“自动驾驶”时刻?
科技云报道原创。
通过一段文字描述,就能生成60秒堪比大片的视频,来自大模型Sora的出色表现,让全球都为之震撼。
无论是ChatGPT还是Sora,都只是大模型走出实验室的第一步,大模型如何在产业中落地,为具体的…
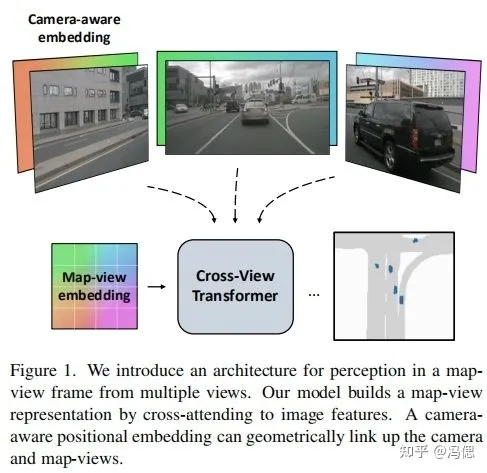
基于BEV的自动驾驶会颠覆现有的自动驾驶架构吗
基于BEV的自动驾驶会颠覆现有的自动驾驶架构吗 引言
很多人都有这样的疑问–基于BEV(Birds Eye View)的自动驾驶方案是什么?这个问题,目前学术界还没有统一的定义,但从我的开发经验上,尝试做一个解释:以鸟瞰视角为基础…

自动驾驶的未来展望和挑战
自动驾驶技术是一项引人瞩目的创新,将在未来交通领域产生深远影响。然而,随着技术的不断演进,自动驾驶也面临着一系列挑战和障碍。本文将探讨自动驾驶的未来发展方向、技术面临的挑战,以及自动驾驶对社会和环境的潜在影响。 自动驾…
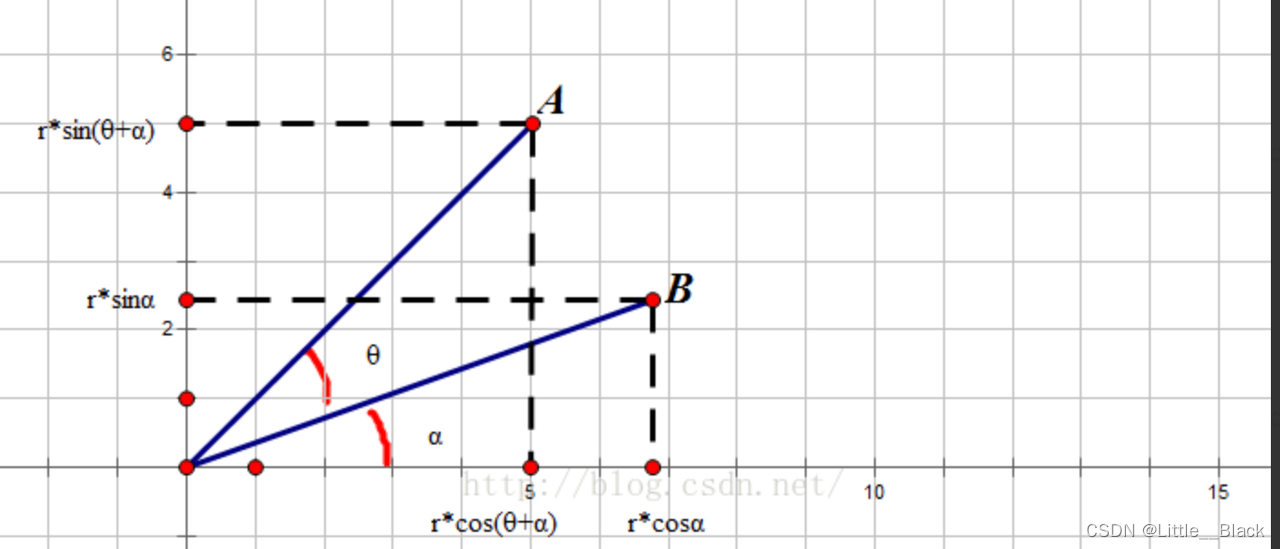
自动驾驶之—2D到3D升维
前言: 最近在学习自动驾驶方向的东西,简单整理一些学习笔记,学习过程中发现宝藏up 手写AI
3D卷积
3D卷积的作用:对于2DCNN,我们知道可以很好的处理单张图片中的信息,但是其对于视频这种由多帧图像组成的图…
(02)Cartographer源码无死角解析-(60) 2D后端优化→ 线程池
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…

DBOW概要理解与记录
前言
DBOW作为一种视觉回环技术被广泛应用在各类VSLAM框架中,之前的经验主要集中在使用和抽象理解层面,近期花了一些时间仔细阅读了相关论文和源码,这里做一些记录。
两个关键概念
Vocabulary
通过预先训练得到的词汇库,以树状…

自动驾驶高效预训练--降低落地成本的新思路(ReSimAD)
自动驾驶高效预训练--降低落地成本的新思路 1. 引言定义高效预训练 2. ReSimAD2.1引言2.2 主要贡献1.发布大规模ReSimAD数据2.ReSimAD pipeline 2.3 实验 上海人工智能实验室
1. 引言 高效的预训练,是大模型的第一步 大模型的两种能力
海量数据分布–未知场景泛化…

自动驾驶高效预训练--降低落地成本的新思路(AD-PT)
自动驾驶高效预训练--降低落地成本的新思路 1. 之前的方法2. 主要工作——面向自动驾驶的点云预训练2.1. 数据准备 出发点:通过预训练的方式,可以利用大量无标注数据进一步提升3D检测 https://arxiv.org/pdf/2306.00612.pdf
1. 之前的方法
1.基于对比学…
自动驾驶系统激光雷达传感器反射率标定板
自动驾驶技术正在全球范围内快速发展和推广。在中国,自动驾驶技术也得到了高度重视和大力支持。中国政府已经出台了一系列政策,推动自动驾驶技术的发展和应用。例如,上海、北京等地已经开放了自动驾驶测试道路,并开展了自动驾驶公…
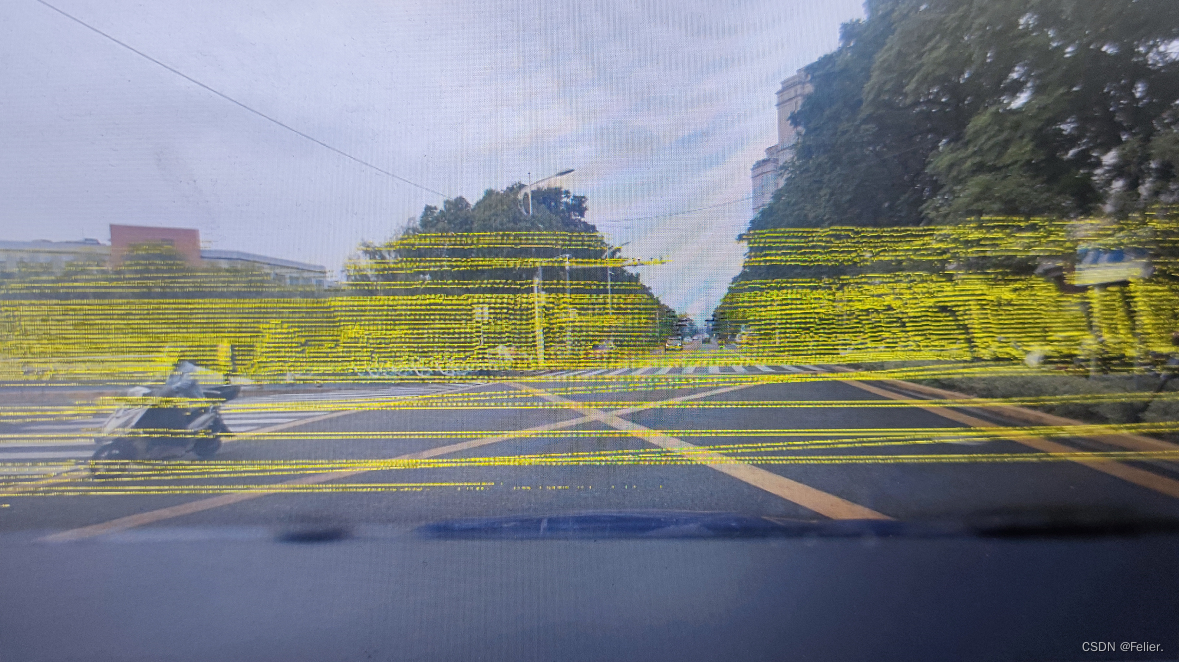
相机内外参实践之点云投影矢量图
目录
概述
涉及到的坐标变换
深度值可视化 3D点云的2D投影实现
实现效果
参考文献 概述 Camer的内外参在多模态融合中主要涉及到坐标系变换,即像素坐标、相机坐标以及其他坐标系。这篇就针对点云到图像的投影与反投影做代码实践,来构建一张具有深度…
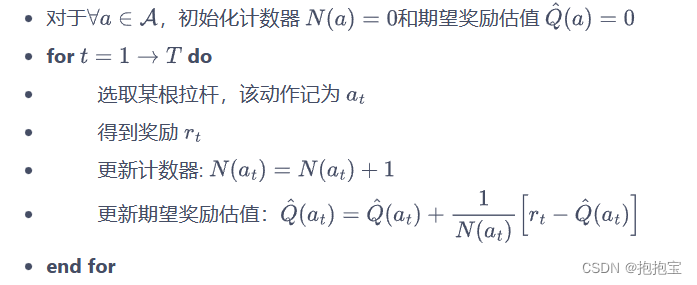
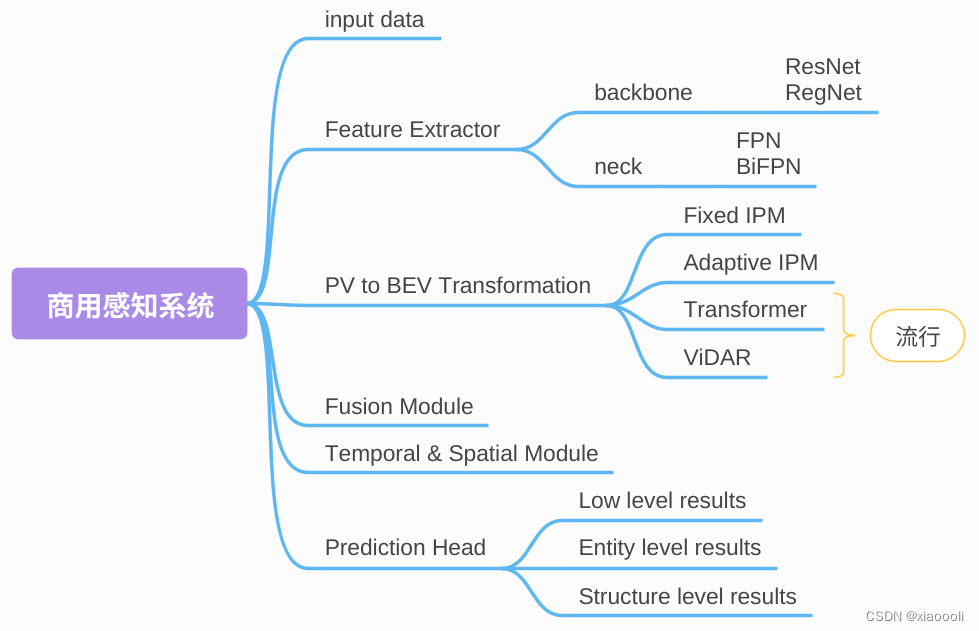
自动驾驶-BEV感知综述
BEV感知综述
随着自动驾驶传感器配置多模态化、多源化,将多源信息在unified View下表达变得更加关键。BEV视角下构建的local map对于多源信息融合及理解更加直观简洁,同时对于后续规划控制模块任务的开展也更为方便。BEV感知的核心问题是:
…
自动驾驶记忆泊车功能规范
目录
1. 文档范围. 5
2. 功能描述. 6
3. 状态机. 8
3.1 状态描述. 8
3.2 状态迁移条件. 9
4. 功能清单. 19
5. 功能流程. 30
5.1 功能逻辑. 30
5.1.1 HU路线列表查看. 30
5.1.2 HU路线学习. 30
5.1.3 HU使用路线匹配. 52…
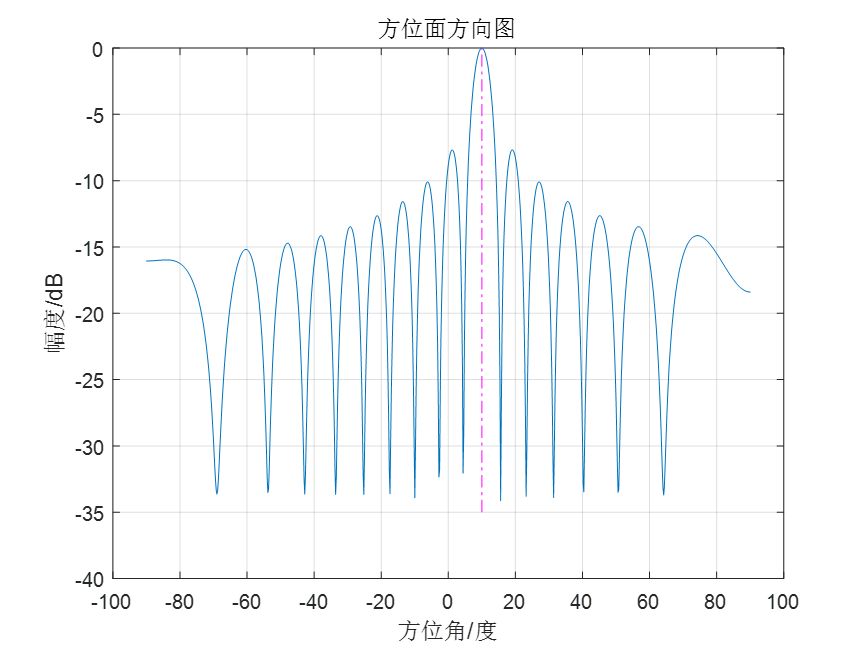
二维平面阵列波束赋形原理和Matlab仿真
1 波束赋形基本原理 实现波束赋形的最基本的方法是对各个天线阵元的信号进行适当延迟后相加,使目标方向的信号同相叠加得到增强,而其他方向均有不同程度的削弱,该方法通常用于模拟信号.数字信号可以通过对各个天线阵元的信号乘以复加权系数后…
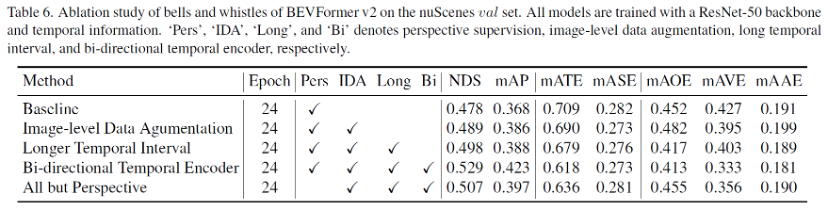
BEVFormer v2论文阅读
摘要
本文工作
提出了一种具有透视监督(perspective supervision)的新型鸟瞰(BEV)检测器,该检测器收敛速度更快,更适合现代图像骨干。现有的最先进的BEV检测器通常与VovNet等特定深度预训练的主干相连,阻碍了蓬勃发展…
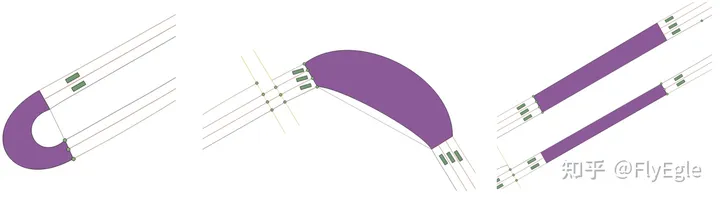
自动驾驶建图--道路边缘生成方案探讨
自动驾驶建图–道路边缘生成方案探讨 一、背景
对于自动驾驶来说,建图是必不可少的,目前主流厂商技术都在从HD到"无图"进行过渡筹备中,不过想要最终实现真正的"无图"还是有很长的一段路要走。 对于建图来说,…
ROS 创建自定义操作
一、说明 在本教程中,您将学习如何创建自定义 ROS 操作,并将其导入您的代码(Python 和 Cpp)中。当您需要异步客户端/服务器机制时,使用 ROS 操作非常方便。您当然可以使用一些现有的操作定义,但通常您需要某…
高翔:《自动驾驶与机器人中的SLAM技术 》-Slam_in_autonomous_driving 编译过程中遇到的问题
使用的环境是ubuntu20.04
问题1.安装g2o没有问题,不过在编译整个项目工程时候报错:
”openmp_mutex.h: 30:10: fatal error: g2o/config.h: No such file or directory“:
解决办法:
只需要将/thirdparty/g2o/build/g2o下的config.h放到/…

1.ORB-SLAM3系统概述
1.内容简介
本系列文章主要基于ORB-SLAM3代码、论文以及相关博客,对算法原理进行总结和梳理。
ORB-SLAM系列整体架构是不变的,都包含Tracking、LocalMapping和LoopClosing三个核心线程,中间伴随着优化过程。在ORB-SLAM3算法中比较突出的改进…

open------mv----四象限--line interpolation
MoveLine.py
#直线插补代码
#MoveLine.Move_Line_Interpolation(0,0,5,8,1)
#x00,y00,xe5,ye8,quadrant1
#cnt 0,x01,y00
#cnt 1,x01,y01
#cnt 2,x01,y02
#cnt 3,x02,y02
#cnt 4,x02,y03
#cnt 5,x02,y04
#cnt 6,x03,y04
#cnt 7,x03,y05
#cnt 8,x04,y05
#cnt 9,x04,y06
#cnt 10…
OCS2 入门教程(五)- 从 URDF 到 OCP、配置求解器、MPC - Net
系列文章目录 前言
阻碍 MPC 在机器人任务中广泛应用的主要挑战之一是设置最优控制问题的负担。OCS2 提供了多个辅助类,用于定义一些常用模型、成本和约束条件,以减轻这一问题。为此,OCS2 提供了多个第三方软件包接口,如 RobCoGe…
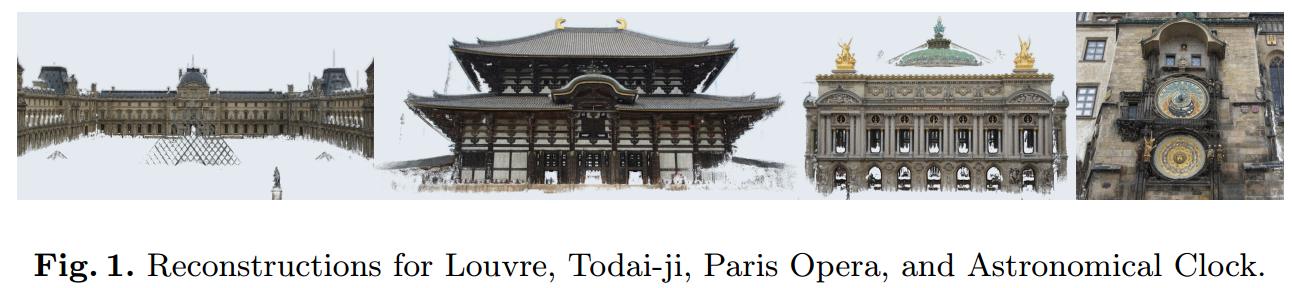
Colmap学习笔记(一):Pixelwise View Selection for Unstructured Multi-View Stereo论文阅读
1. 摘要
本文展示一套MVS系统,该系统利用非结构化的图片实现鲁棒且稠密的建模。本文的主要贡献是深度和法向量的联合估计,用光度和几何先验进行像素筛选,多视图几何一致项,该项同时进行精修和基于图片的深度和法向量的融合。在标…
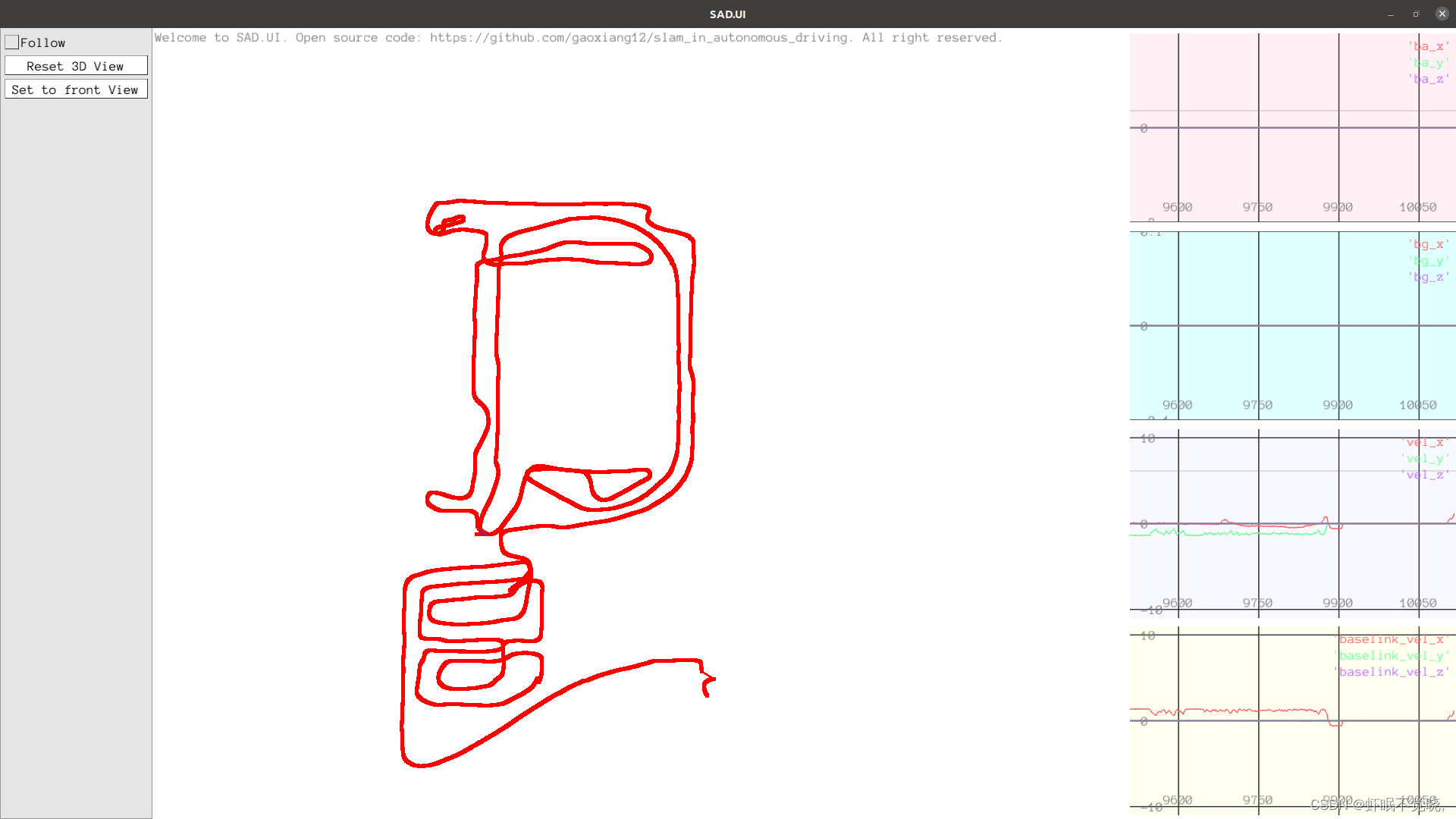
自动驾驶SLAM技术第四章习题2
在g2o的基础上改成ceres优化,高博都写好了其他的部分, 后面改ceres就很简单了. 这块我用的是ceres的自动求导,很方便,就是转化为模板仿函数的时候有点麻烦, 代码部分如下
ceres_type.h : ceres优化核心库的头文件
这个文件写的内…

自动驾驶中之定位总结
1 前言2 典型的单个定位方式2.1 基于通信的定位方法2.1.1 GNSS 全球卫星导航系统2.1.1.1 gnss的优点与缺点2.1.1.2 gnss定位技术2.1.1.2.1 RTK定位技术2.1.1.2.2 PPP定位技术 2.1.1.2 gnss定位技术总结 2.1.2 车联网定位 2.1 基于航位推算的定位方法2.1.1 惯性测试单元定位IMU2…
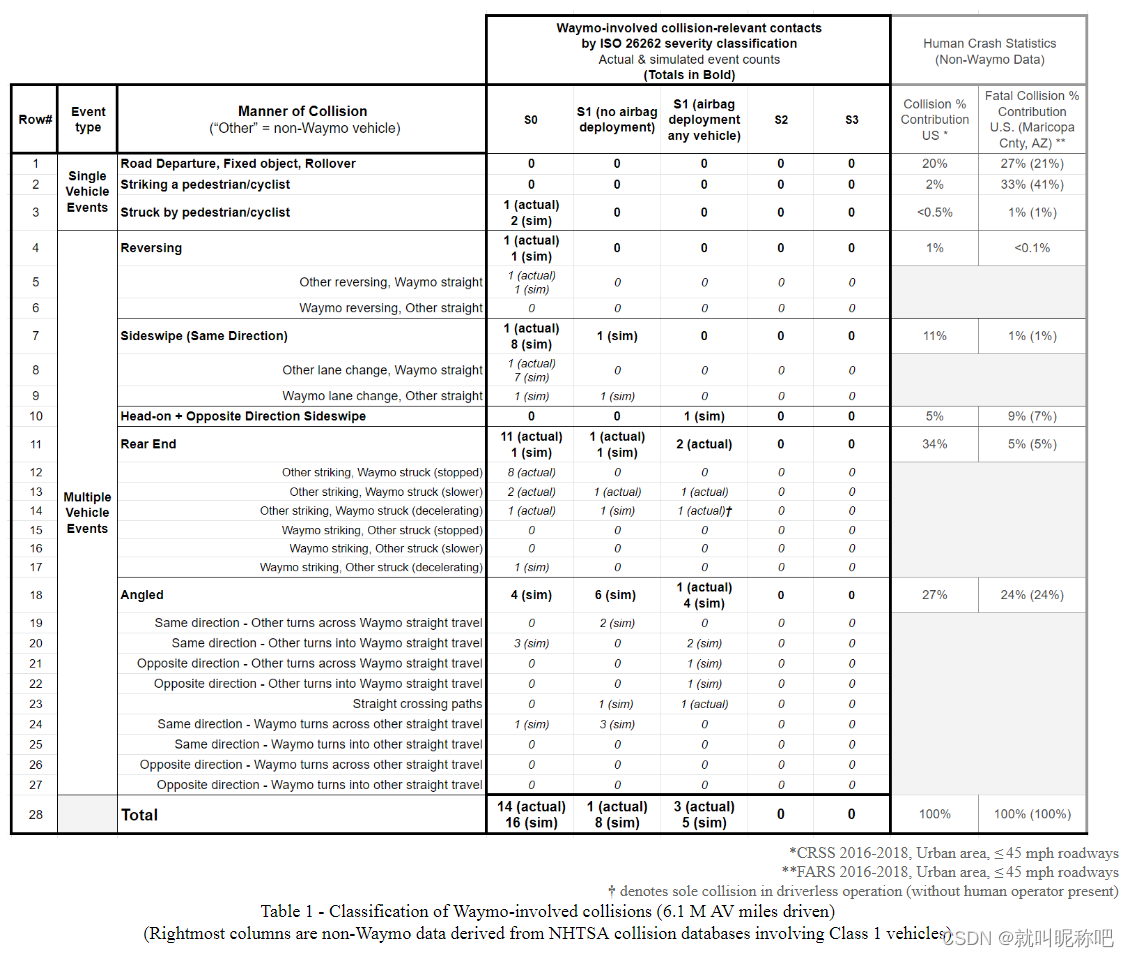
论文阅读:《Waymo Public Road Safety Performance Data》
文章目录 1 背景2 方法2.1 数据来源2.2 碰撞数据 3 碰撞事件分析4 讨论 1 背景 这篇文章是讲waymo道路安全性能数据分析的,主要想表达的是waymo自动驾驶系统在安全上面的出色表现,以向政府、大众提高自己产品的公信力。 这篇文章分析的数据是自从2019年到…

技巧-PyCharm中Debug和Run对训练的影响和实验测试
本专栏为深度学习的一些技巧,方法和实验测试,偏向于实际应用,后续不断更新,感兴趣童鞋可关,方便后续推送
简介
在训练深度学习模型时,使用PyCharm的Debug模式和Run模式对训练模型的耗时会有一些区别。 Debug模式:Debug模式在训练模型时,会对…
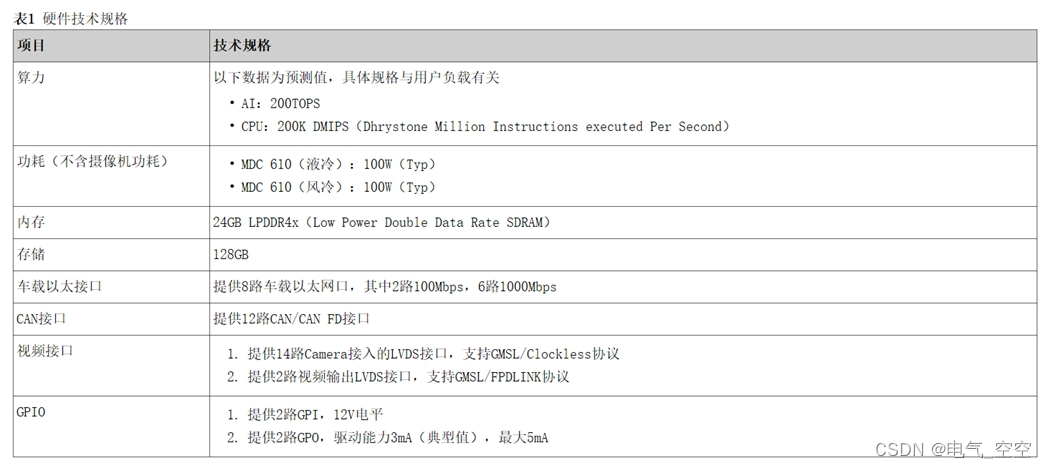
如何从单应矩阵H中分解旋转矩阵R和平移向量t?
在计算机视觉中,单应矩阵通常用于图像配准和相机标定等任务。下面是使用SVD分解单应矩阵来求解旋转矩阵(R)和平移向量(t)的简要推导过程。
假设求解得到一个单应矩阵H: H [ h 11 h 12 h 13 h 21 h 22 h …
自动驾驶代客泊车PAVP功能规范
目录
1. 版本记录......................................................................................... 4
2. 引言................................................................................................ 5
2.1 目的/范围...............…
自动驾驶:低阶可部署的单目测距算法-基于YOLO与透视变换
一、开发环境 部署平台:英伟达的Jetson Nano 环境:Linux ROS 语言:C 设备:1920*1080像素的摄像头、开发板。 模型:yolo-v8s
二、单目测距实现思路 0、标定相机和车辆(假设已经标定完成) 1、通…
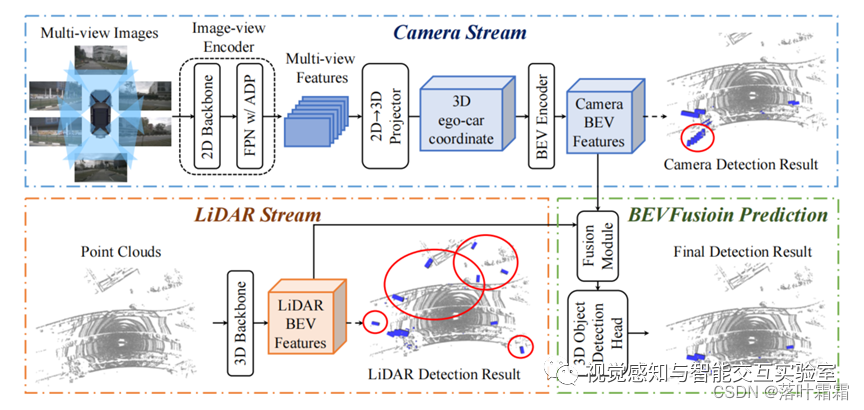
【BEV感知算法概述——下一代自动驾驶感知算法】
文章目录 BEV感知算法概念BEV感知算法数据集介绍BEV感知算法分类BEV感知算法的优劣小结 BEV感知算法概念
Bird’s-Eye-View,鸟瞰图(俯视图)。BEV感知算法存在许多的优势。
首先,BEV视图存在遮挡小的优点,由于视觉的透…
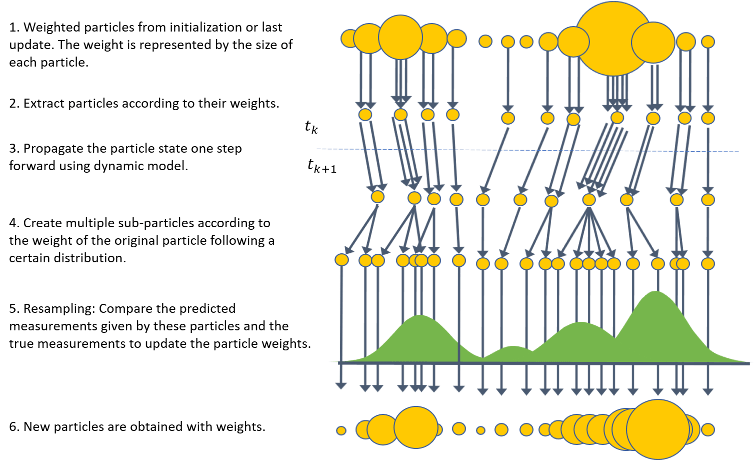
MATLAB - 估计滤波器(Estimation Filters)
系列文章目录 前言 本篇文章翻译自官网,部分下标有问题,请自行分辨。 一、背景介绍
1.1 估算系统 对于许多自主系统(autonomous systems)来说,了解系统状态(system state)是设计任何应用的先决…
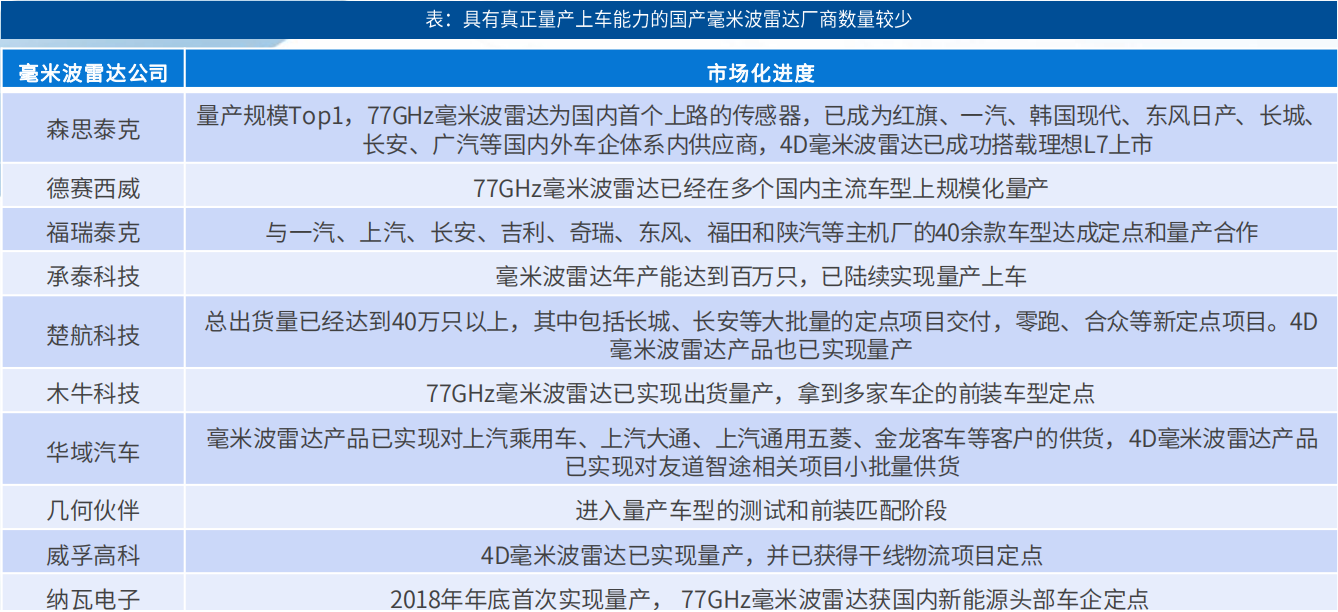
车载毫米波雷达及芯片新趋势研究1--毫米波雷达与其它车载传感器互补,研发及量产门槛较高
1.1 毫米波雷达是利用毫米波电磁波波束工作的雷达,车载是首要应用场景 毫米波雷达是一种以波长位于1-10mm、频率在30-300GHz的电磁波作为放射波的雷达传感器。 毫米波雷达利用毫米波波束进行工作。①检测障碍物时: 直接通过有无回波确认ÿ…
技术分享 | 自动驾驶的春晚—Tesla AI Day
在此前的 Tesla AI Day 盛会上,特斯拉除了发布 Optimus “擎天柱”机器人,同时公布了自动驾驶 Full Self-Driving Computer (FSD) 的技术细节。其中包含纯电动汽车 (BEV) 的感知神经网络 Occupancy Network (栅格网络)、Interactive Planning (交互规划)…
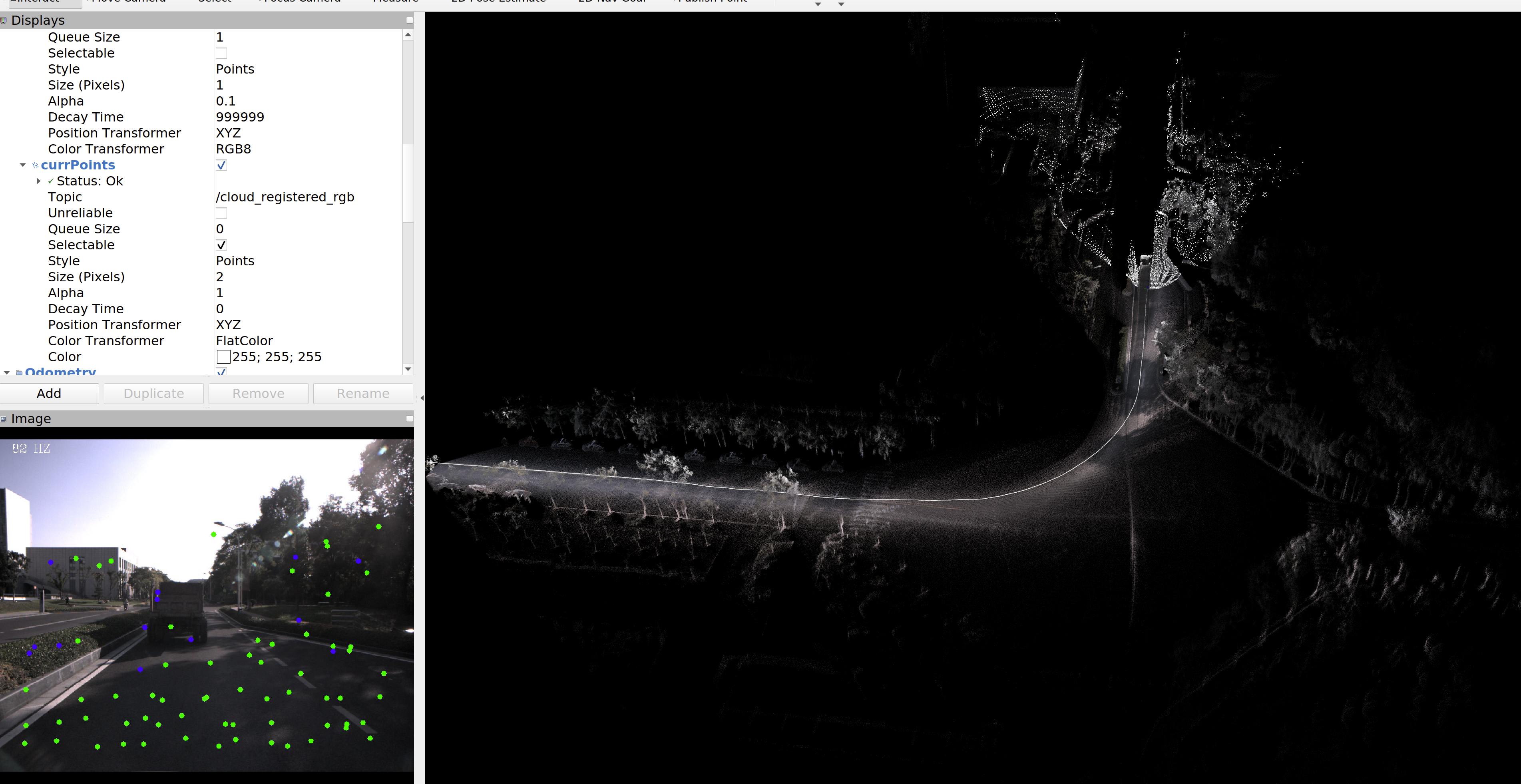
工程(十六)——自己数据集跑Fast_livo
一、基础环境
Ubuntu20.04
ROS noetic
PCL 1.8
Eigen 3.3.4
Sophus
git clone https://github.com/strasdat/Sophus.git
cd Sophus
git checkout a621ff
mkdir build && cd build && cmake ..
make
sudo make install
下面两个直接把包下载下来一起编译…
FPGA和DSP的区别
FPGA与DSP
FPGA与DSP的区别(粗略整理)
https://blog.csdn.net/clara_d/article/details/82355397 ARM,DSP,FPGA三者比较
csdn链接
DSP是通用的信号处理器,用软件实现数据处理;FPGA用硬件实现数据处理。DSP成本低,算…

Apollo自动驾驶:从概念到现实的里程碑
前言 「作者主页」:雪碧有白泡泡 「个人网站」:雪碧的个人网站
ChatGPT体验地址 文章目录 前言1. Apollo Client2. Apollo Server3. Apollo Federation4. Apollo Tracing5. Apollo Codegen6. Apollo Link7. 其他工具和框架结论 🚀…
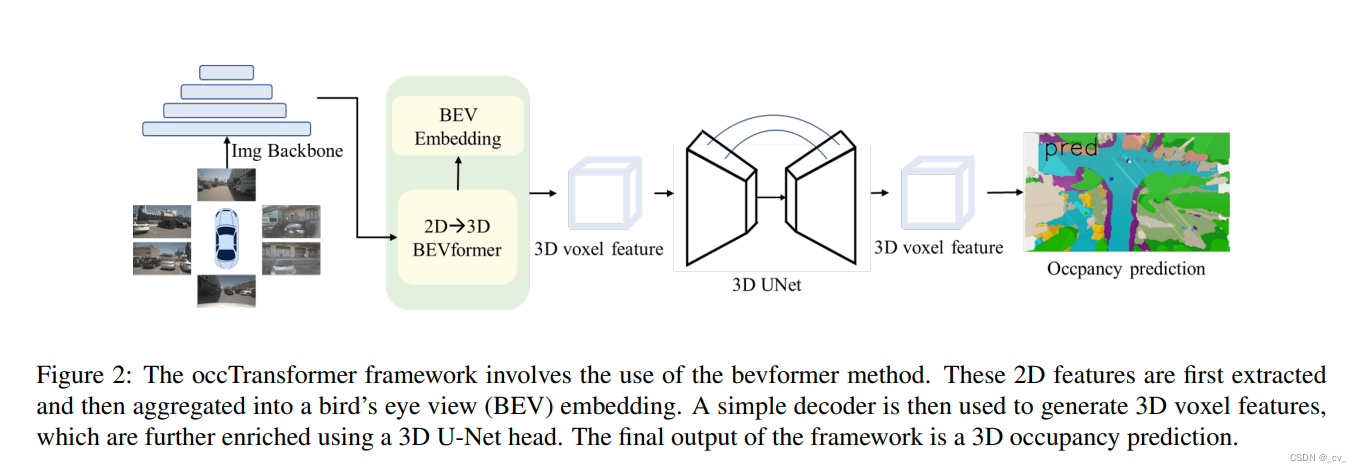
万字长文谈自动驾驶occupancy感知
文章目录 prologuepaper listVision-based occupancy :1. [MonoScene: Monocular 3D Semantic Scene Completion [CVPR 2022]](https://arxiv.org/pdf/2112.00726.pdf)2. [Tri-Perspective View for Vision-Based 3D Semantic Occupancy Prediction [CVPR 2023]](https://arxiv…
【MISRA C 2012】Rule 2.7 函数中不应有未使用的形参
1. 规则1.1 原文1.2 分类 2. 关键描述3. 代码实例 1. 规则
1.1 原文
Rule 2.7 There should be no unused parameters in functions Category Advisory Analysis Decidable, Single Translation Unit Applies to C90, C99
1.2 分类
规则2.7:函数中不应有未使用的…
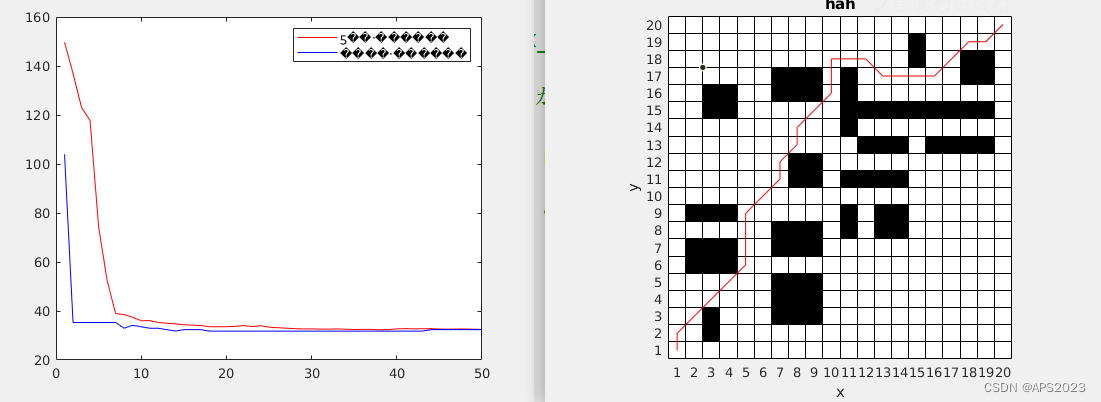
自动驾驶算法(七):基于遗传算法的路径规划(下)
目录 1 遗传选择
2 遗传交叉
3 遗传变异
4 结语 1 遗传选择 我们书接上回,我们完成了种群的初始化,将所有的种群放入了new_pop1中,这个new_pop1是一个(种群大小 * 路径)的一个矩阵,我们来看如何进行遗传…

毫米波雷达技术在自动驾驶中的关键作用:安全、精准、无可替代
自动驾驶技术正以前所未有的速度不断演进,而其中的关键之一就是毫米波雷达技术。作为自动驾驶系统中的核心感知器件之一,毫米波雷达在保障车辆安全、实现精准定位和应对复杂环境中发挥着不可替代的作用。本文将深入探讨毫米波雷达技术在自动驾驶中的关键…

【单目测距】单目相机测距(三)
文章目录 一、前言二、测距代码2.1、地面有坡度2.2、python代码2.2.1、旋转矩阵转角度2.2.2、角度转旋转矩阵2.2.3、三维旋转原理 (Rotation 原理)2.2.4、完整代码 2.3、c 代码 一、前言 上篇博客【单目测距】单目相机测距(二) 有讲到当相机不是理想状态…

解锁4D成像雷达「降本」
传感器增强,被视为高阶智驾继续解锁ODD(针对自动驾驶及相关功能专门设计的运行条件)的关键环节之一。 众所周知,市面上在售新车搭载的智驾系统,由于传感器、算力以及软件算法能力的差异,会导致系统正常运行…
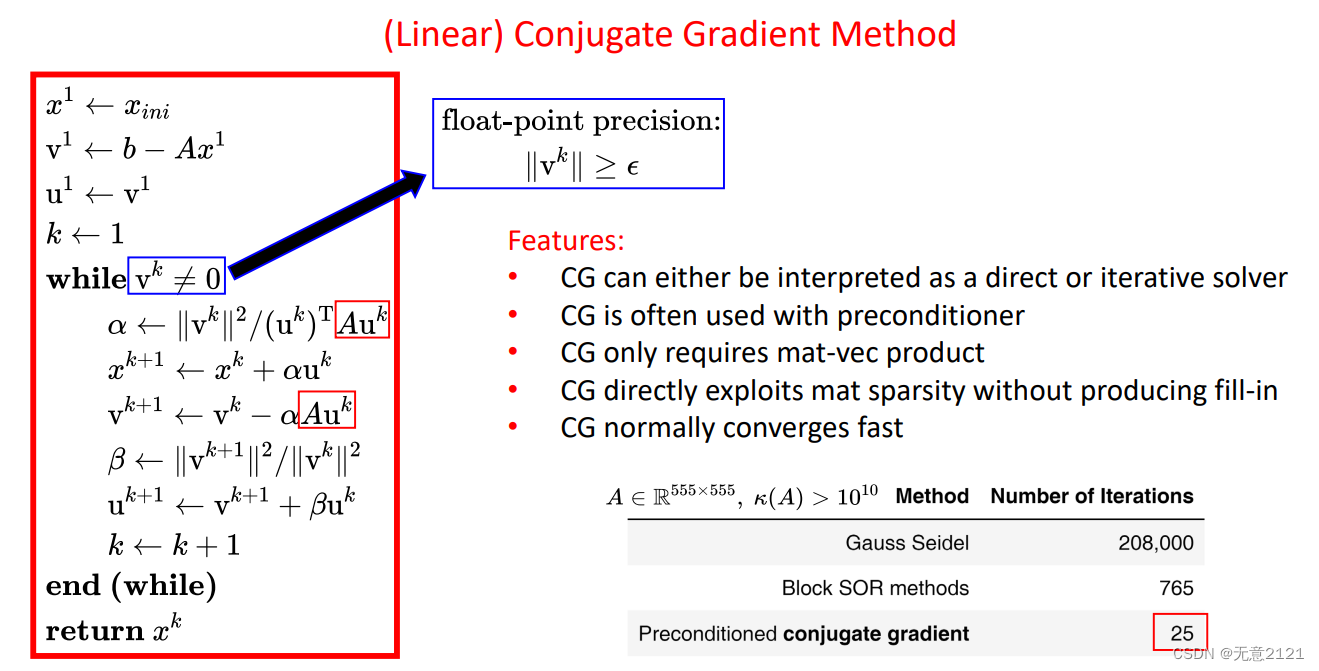
机器人中的数值优化之线性共轭梯度法
欢迎大家关注我的B站:
偷吃薯片的Zheng同学的个人空间-偷吃薯片的Zheng同学个人主页-哔哩哔哩视频 (bilibili.com)
本文ppt来自深蓝学院《机器人中的数值优化》
目录
1.无约束优化方法对比
2.Hessian-vec product
3.线性共轭梯度方法的步长编辑
4.共轭梯度…
11.8 校招 实习 内推 面经
绿*泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、校招&实习 | 旷视 “秋招补录实习”职位上新啦(内推)
校招&实习 | 旷视 “秋招补录实习”职位上新啦(内推) 2、校招 | 寒武纪校招进…
无人驾驶相关硬件汇总
1:激光雷达
激光雷达主要用于3D感知,是一种可以探测物体精确位置的传感器,其主要是通过对目标物发射激光信号,再根据从物体反射回来的信号时间差来计算这段距离,然后根据发射激光的角度来确定物体和发射器的角度&…
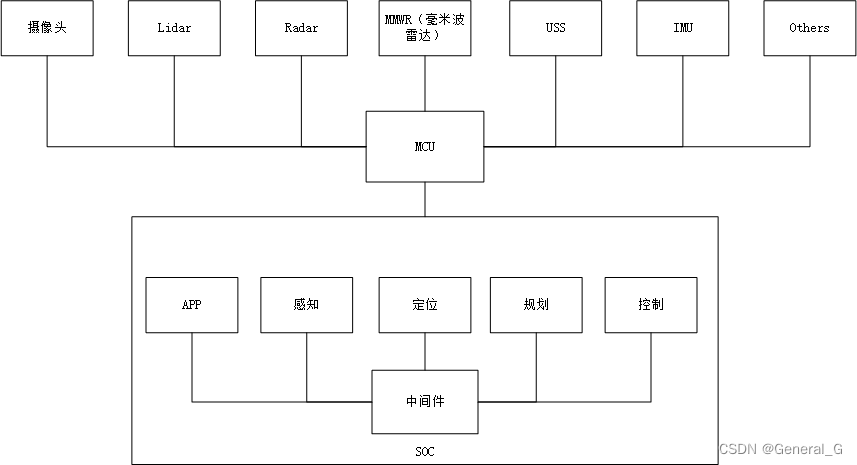

智驾芯片全矩阵「曝光」,这家企业的车载品牌正式官宣
随着汽车智能化加速,智能驾驶芯片格局逐渐清晰。
针对L0-L2,业内基本采用智能前视一体机方案;要实现高速NOA、城市NOA等更为高阶的智驾功能等,则基本采用域控制器方案。从前视一体机至域控,再逐步演进到舱驾一体、中央…
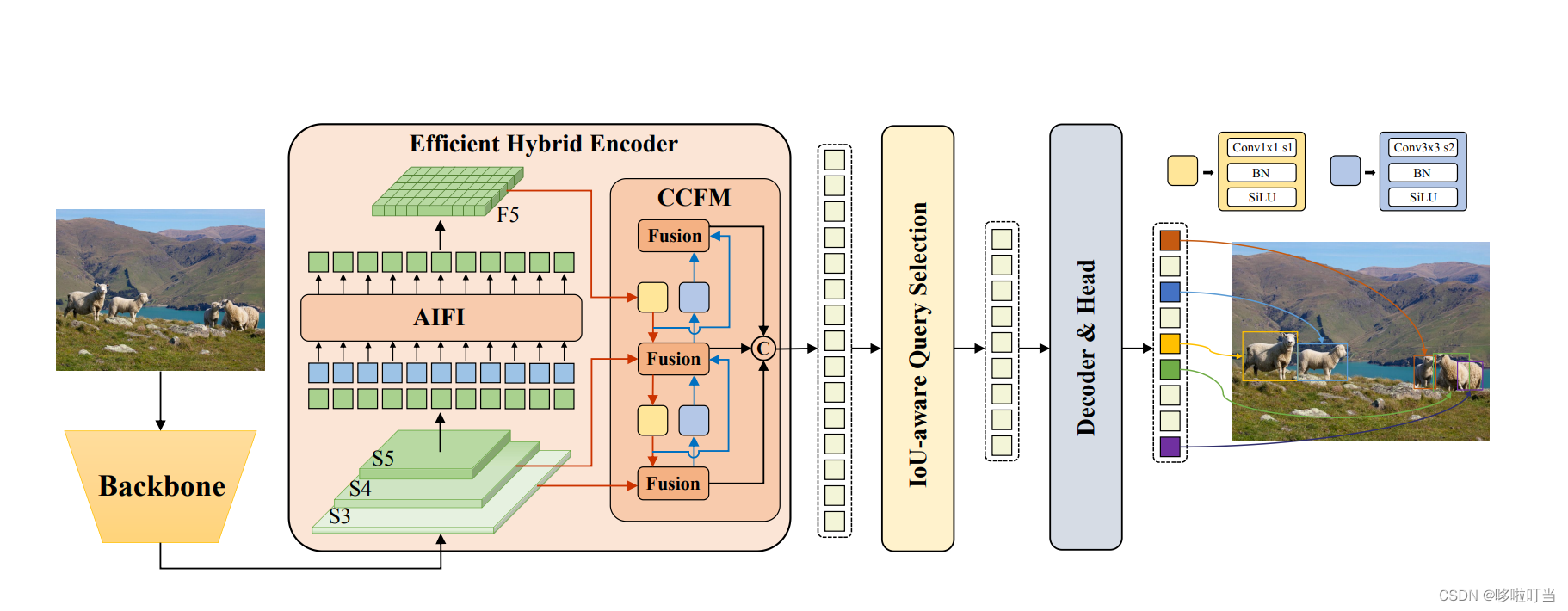
DETR解读,将Transformer带入CV
论文出处
[2005.12872] End-to-End Object Detection with Transformers (arxiv.org)
一个前置知识
匈牙利算法:来源于二部图匹配,计算最小或最大匹配
算法操作:在n*n的矩阵中 减去行列最小值,更新矩阵(此时行或者…

【百度Apollo】探索创新之路:深入了解Apollo开放平台
🎬 鸽芷咕:个人主页 🔥 个人专栏: 《linux深造日志》《粉丝福利》 ⛺️生活的理想,就是为了理想的生活! ⛳️ 推荐 前些天发现了一个巨牛的人工智能学习网站,通俗易懂,风趣幽默,忍不住分享一下…
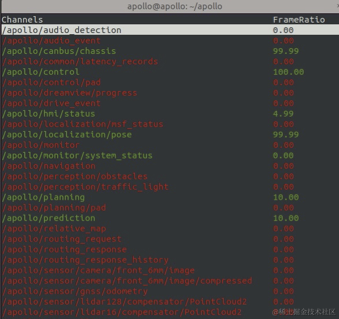
【百度Apollo】自动驾驶的领航者
🎬 鸽芷咕:个人主页 🔥 个人专栏: 《linux深造日志》《粉丝福利》 ⛺️生活的理想,就是为了理想的生活! ⛳️ 推荐 前些天发现了一个巨牛的人工智能学习网站,通俗易懂,风趣幽默,忍不住分享一下…
深度强化学习系列【1】- 强化学习的背景、基础理论等
引言:
这篇博客主要是学习清华大学车辆学院 李升波老师(Shengbo Eben Li)的PPT课件的一些心得体会。 深度强化学习系列【1】- 强化学习的背景、基础理论等 1. 深度强化学习的背景、发展与理论变迁1.1 序1.2 Alpha Go的崛起1.3 Waymo (谷歌收购) 加州公共道路无人驾驶项目获…
自动驾驶货车编队行驶系统功能规范
货车编队行驶功能规范
Truck Platooning Functional Specification
目录
1 概述... 7
1.1 目的... 7
1.2 范围... 7
1.3 术语及缩写... 7
1.4 参考法规标准... 8
2 功能规范... 9
2.1 功能描述... 9
2.1.1 功能用途…
ROS2 学习笔记12:使用 colcon 构建软件包
ROS2 学习笔记12:使用 colcon 构建软件包 Background 背景Prerequisites 前提1 Install colcon2 Install ROS 2 Basics 基础1 Create a workspace2 Add some sources3 Source an underlay4 Build the workspace5 Run tests6 Source the environment7 Try a demo Cre…
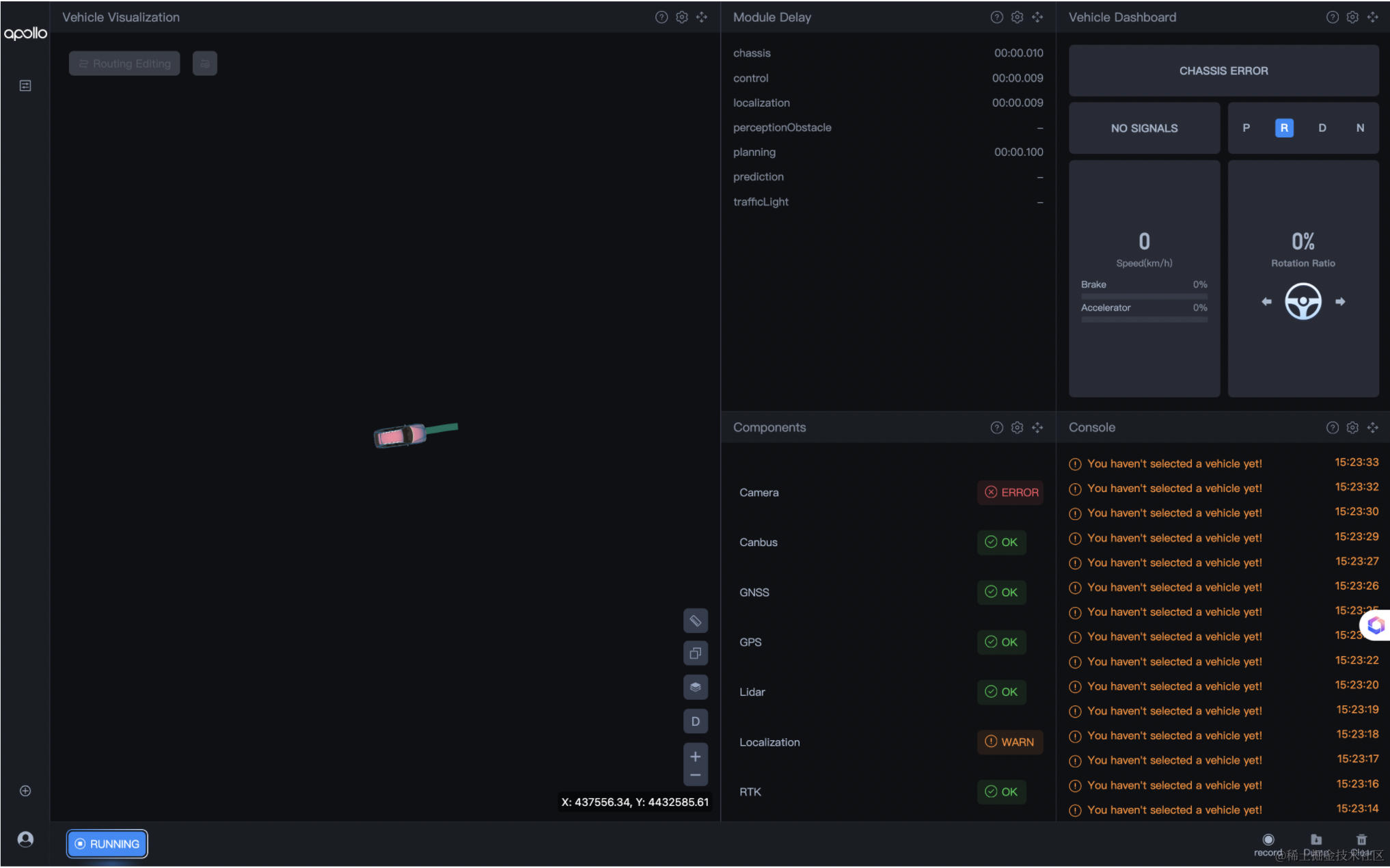
【百度Apollo】循迹自动驾驶:探索基于视觉感知的路径规划与控制技术
🎬 鸽芷咕:个人主页 🔥 个人专栏: 《linux深造日志》《粉丝福利》 ⛺️生活的理想,就是为了理想的生活! ⛳️ 推荐 前些天发现了一个巨牛的人工智能学习网站,通俗易懂,风趣幽默,忍不住分享一下…
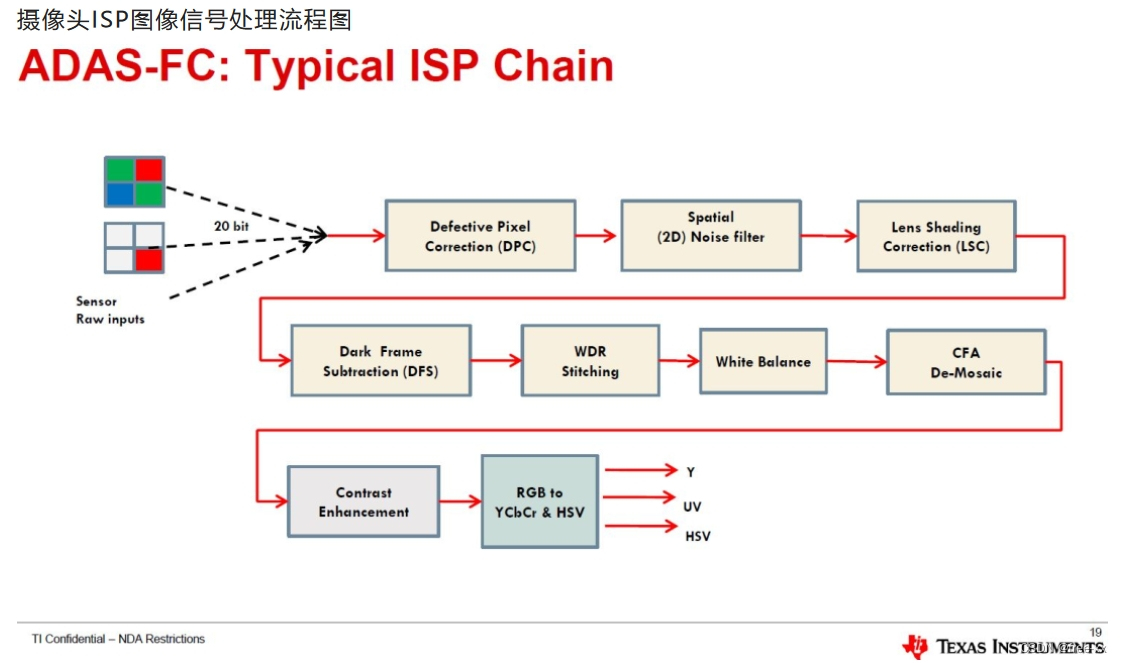
ADAS感知摄像头的分辨率与帧率选择分析
说明:可以作为对智能驾驶爱好者对摄像头参数理解或者从业工程人员对设计硬件选型参考 前言
在当前智能驾驶中,基于摄像头的 ADAS 因其应用、更高的可靠性和对新要求的适应性而被广泛采用。
ADAS 摄像头通常部署在汽车的前部、侧面和后部,提…
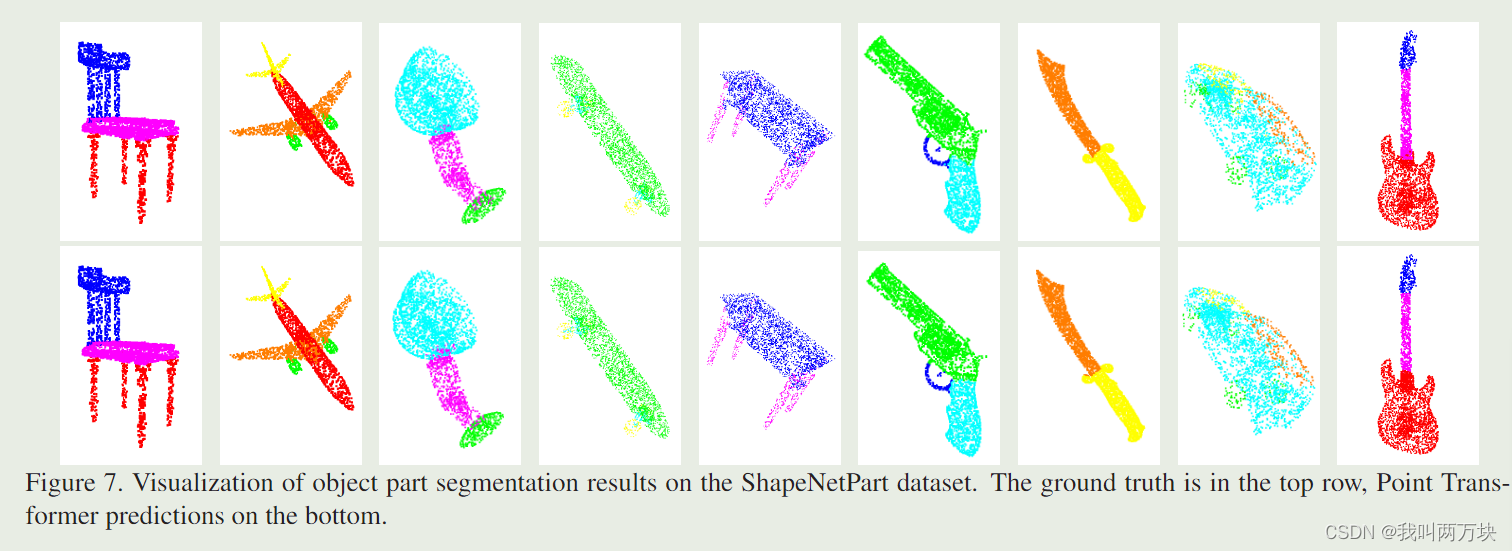
【论文解读】Point Transformer
Point Tranformer 摘要引言方法实验结论 摘要
自注意网络已经彻底改变了自然语言处理,并在图像分析任务(如图像分类和对象检测)方面取得了令人印象深刻的进展。受这一成功的启发,我们研究了自注意网络在三维点云处理中的应用。我…
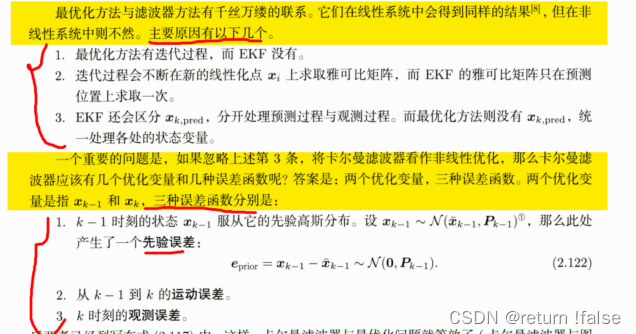
学习记录-自动驾驶与机器人中的SLAM技术
以下所有内容均为高翔大神所注的《自动驾驶与机器人中的SLAM技术》中的内容
融合导航
1. EKF和优化的关系 2. 组合导航eskf中的预测部分,主要是F矩阵的构建
template <typename S>
bool ESKF<S>::Predict(const IMU& imu) {assert(imu.timestamp…
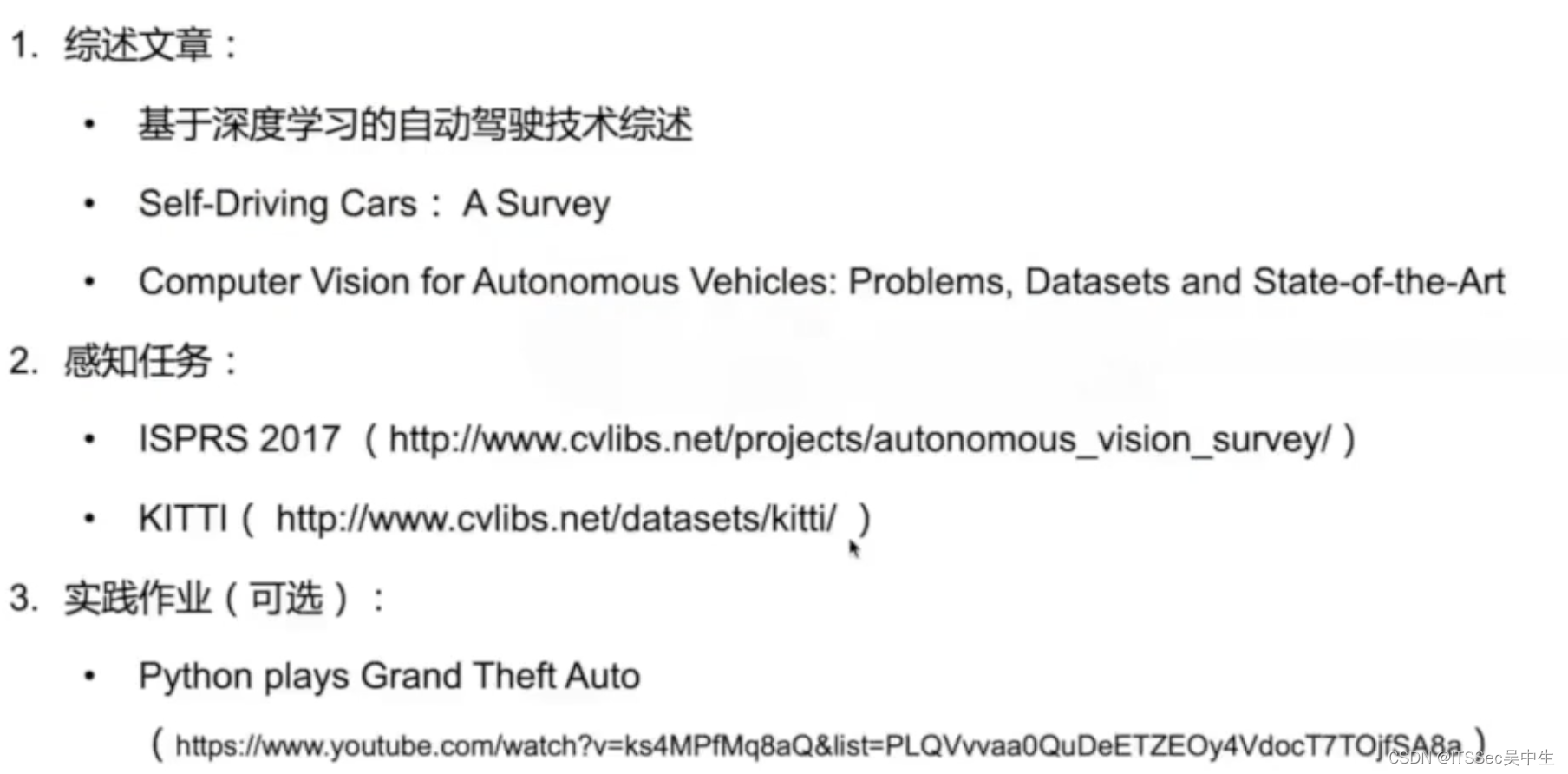
第01课:自动驾驶概述
文章目录 1、无人驾驶行业概述什么是无人驾驶智慧出行大趋势无人驾驶能解决什么问题行业趋势无人驾驶的发展历程探索阶段(2004年以前)发展阶段(2004年-2016年)成熟阶段(2016年以后) 2、无人驾驶技术路径无人…
11.30校招 实习 内推 面经
绿*泡*泡 VX : neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、校招 | 腾讯2024校园招聘持续热招中(内推)
校招 | 腾讯2024校园招聘持续热招中(内推) 2、校招 | 格力电器2024届秋招补录启动
校招…
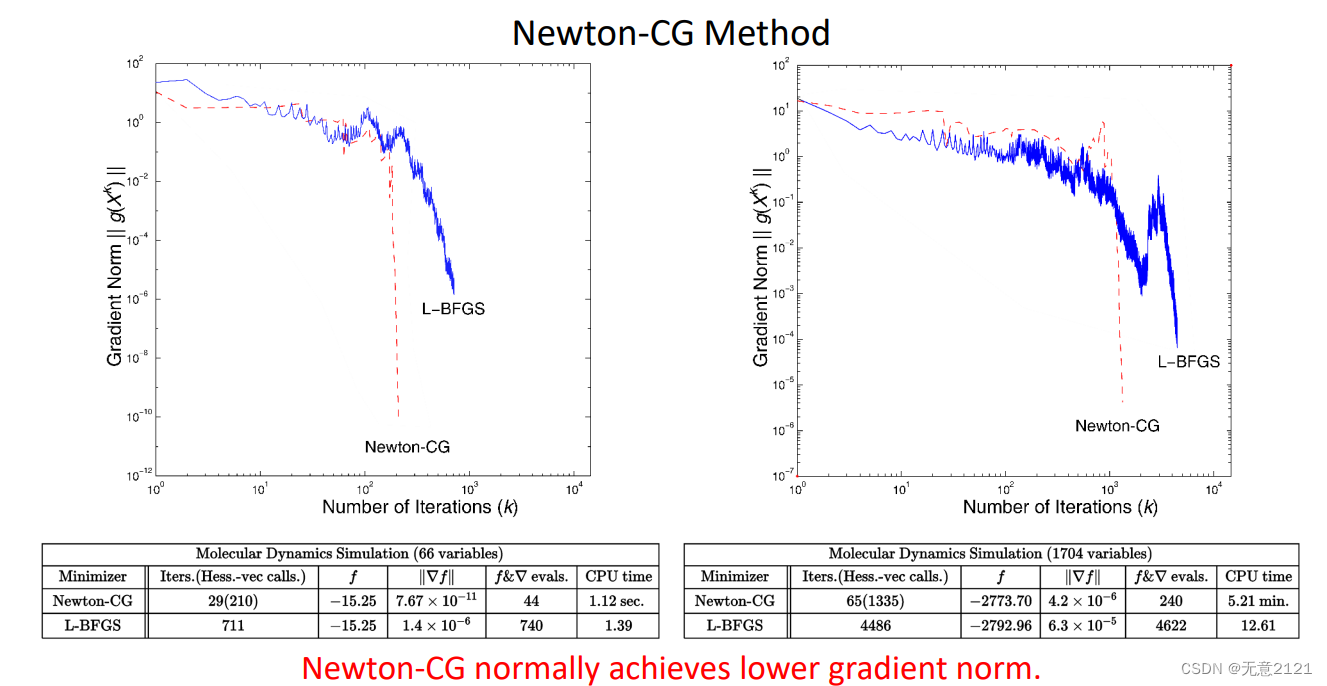
机器人中的数值优化之牛顿共轭梯度法
欢迎大家关注我的B站:
偷吃薯片的Zheng同学的个人空间-偷吃薯片的Zheng同学个人主页-哔哩哔哩视频 (bilibili.com)
本文ppt来自深蓝学院《机器人中的数值优化》 如何解决Hessian矩阵非正定的情况
求解线性系统需要很精确么 引入截断的机制,如果Hessia…
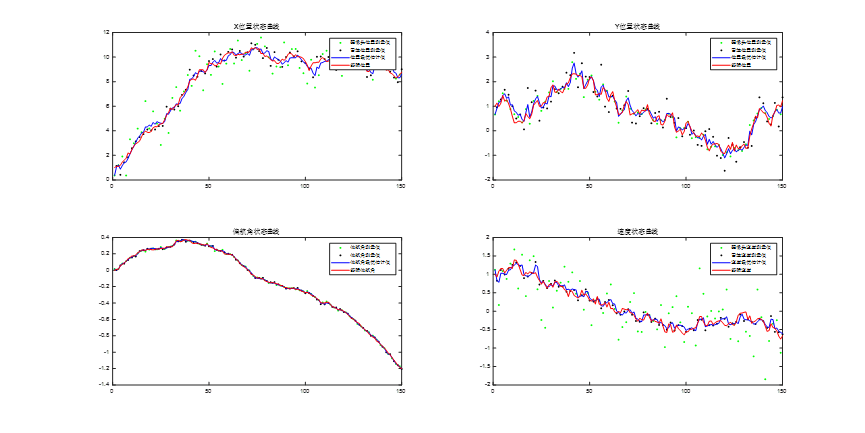
运动模型非线性扩展卡尔曼跟踪融合滤波算法(Matlab仿真)
卡尔曼滤波的原理和理论在CSDN已有很多文章,这里不再赘述,仅分享个人的理解和Matlab仿真代码。
1 单目标跟踪 匀速转弯(CTRV)运动模型下,摄像头输出目标状态camera_state [x, y, theta, v],雷达输出目标状…
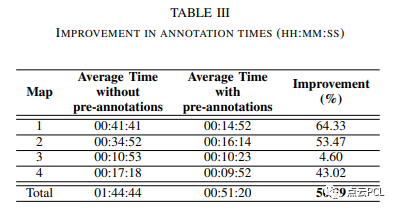
基于激光雷达的路沿检测用于自动驾驶的真值标注
文章:LiDAR-based curb detection for ground truth annotation in automated driving validation
作者:Jose Luis Apellaniz , Mikel Garcıa , Nerea Aranjuelo , Javier Barandiaran and Marcos Nieto
编辑:点云PCL 欢迎各位加入知识星…
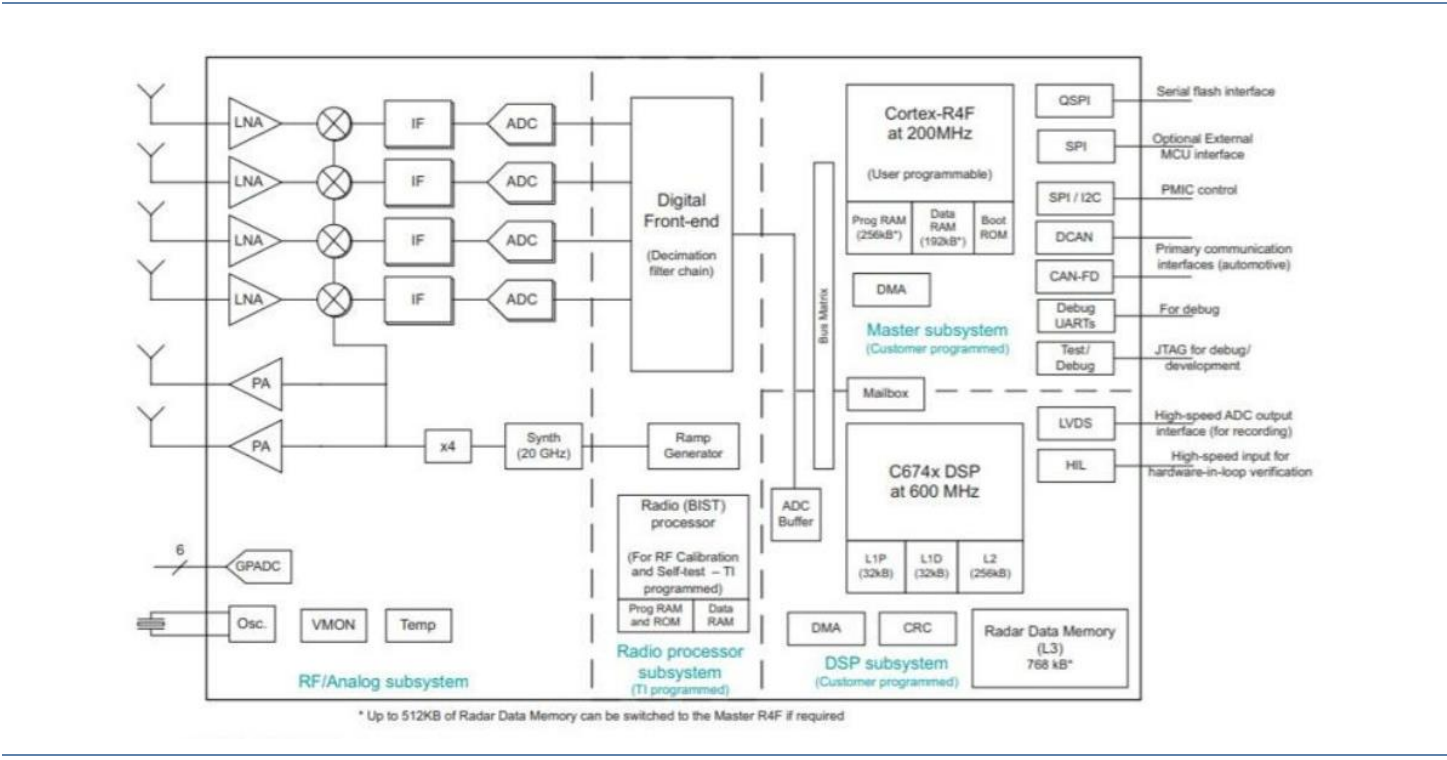
4D 毫米波雷达:智驾普及的新路径(二)
4 4D 毫米波的技术路线探讨
4.1 前端收发模块 MMIC:级联、CMOS、AiP
4.1.1 设计:级联、单芯片、虚拟孔径 4D 毫米波雷达的技术路线主要分为三种,分别是多级联、级联 虚拟孔径成像技术、以及 集成芯片。( 1 )多级…
自动驾驶的未来:BEV与Occupancy网络全景解析与实战揭秘!
自动驾驶领域中,什么是BEV?什么是Occupancy? 作者:小柠檬 | 来源:公众号「3DCV」 BEV是Bird’s Eye View 的缩写,意为鸟瞰视图。在自动驾驶领域,BEV 是指从车辆上方俯瞰的场景视图。BEV 图像可以…
MATLAB - 利用非线性模型预测控制(Nonlinear MPC)来控制四旋翼飞行器
系列文章目录 前言
本示例展示了如何利用非线性模型预测控制(MPC)为四旋翼飞行器设计一个跟踪轨迹的控制器。 一、四旋翼模型
四旋翼飞行器有四个向上的旋翼。从四旋翼飞行器的质量中心出发,旋翼呈等距离的正方形排列。四旋翼飞行器动力学数…

关于比亚迪“自动驾驶忽悠”的20个八卦
作者 |泽鑫
编辑 |德新 01
2022年,王传福说:“都是扯淡,都是忽悠,就是皇帝的新装。自动驾驶只是被资本裹挟和炒作的一个概念,最终就是一个高级辅助驾驶。”
但实际上,2021年比亚迪就跟Momenta成立了智…
大众汽车智能化提速:从智驾安全到电池安全全线武装
作者|Amy
编辑|德新 前段时间ID.7 VIZZION正式上市,外观延续了ID家族简洁、清晰和现代感的设计语言,15英寸屏幕搭配新一代车机操作系统ID. OS 2.0,带着新势力影子,让外界看到了大众智能化转型的决心。
大…
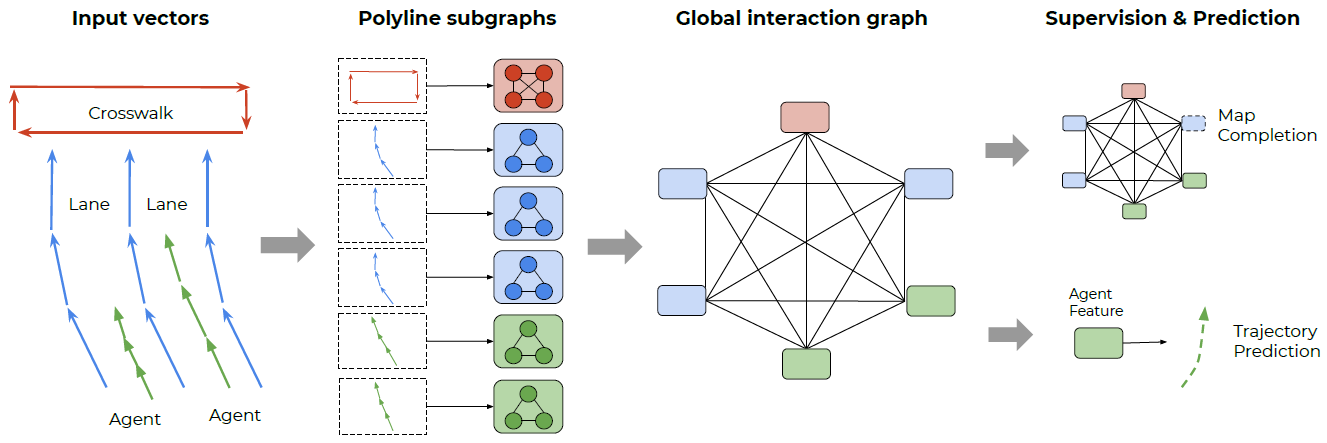
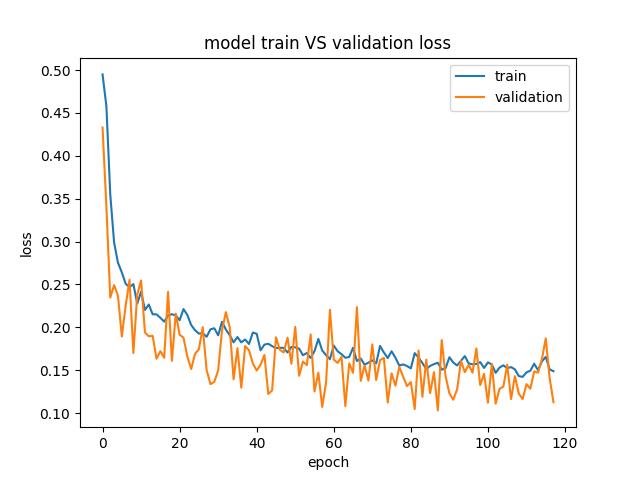
基于Udacity模拟器的端到端自动驾驶决策
1 端到端自动驾驶决策
端到端自动驾驶决策的输入为车辆的感知信息,如摄像头信息,输出为车辆的前轮转角和摄像头等信息。 如上图所示,为英伟达公司的端到端自动驾驶决策框架,其CNN网络如下图所示,其中包括一个归一化…
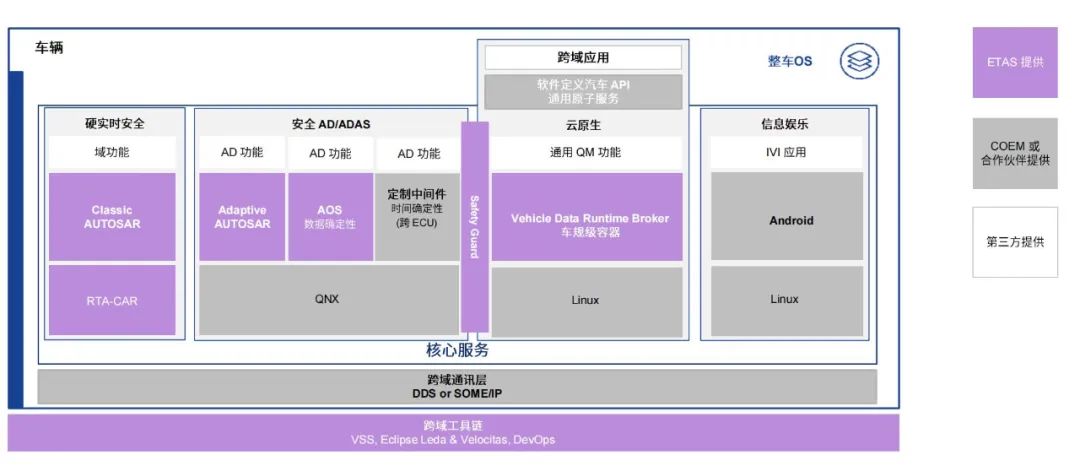
车企围攻整车OS,这张“新王牌”怎么打?
今年2月23日,梅赛德斯--奔驰发布了打造自有操作系统MB.OS的具体计划,该操作系统将在本年代中期随全新梅赛德斯-奔驰模块化架构(MMA)平台推出,预计2025年用户将能体验到它的强大功能。
据悉,基于覆盖芯片到…
hjr-谈一下自动驾驶汽车网络和数据安全
分类
其实我觉得自动驾驶汽车的安全分为两种,
一种是行驶的车是否出车祸的安全,这种主要考验自动驾驶的算法和能力
另一种是传统服务器终端安全,这种主要是传统的网络安全和数据安全
传统的网络和数据安全保障方式 建立完善的安全策略和规…

赛事报名启动丨百度Apollo星火自动驾驶大赛开始报名啦!
作为汽车智能化、网联化的关键环节,自动驾驶成为全球科技界、产业界竞争的新赛道。随着人工智能、5G通信、激光雷达、高精地图等多项技术不断完善,自动驾驶的判断力和理解力得到了显著提升。为了推动自动驾驶技术的发展、加快人工智能技术的迭代…

自动驾驶「时过境迁」,这家头部出行服务平台再出发
滴滴自动驾驶复活了?
昨日,滴滴正式发布了首个自动驾驶自动运维中心,以及首款未来服务概念车DiDi Neuron,同时还公布了在技术、硬件、量产以及新业务探索方面的进展。 按照计划,滴滴自动驾驶正在结合新能源整车企业能…

智加科技与舍弗勒签订商用车先进转向系统量产合作协议,将率先量产行业首个正向开发的智能重卡冗余转向
自动驾驶已经成为当前汽车行业的重要发展趋势之一。在此背景下,在2023上海国际汽车展期间,智加科技与舍弗勒集团签订量产合作协议,双方将在自动驾驶商用车先进转向系统领域展开合作,共同推动重卡自动驾驶的技术应用和创新发展。 图…

【运动规划算法】路径规划中常用的插值方法
文章目录 简介一、线性插值二、三次样条插值三、B样条插值四、贝塞尔曲线插值总结 简介
常见用于处理路径平滑的插值算法主要包括线性插值、三次样条插值、B样条插值和贝塞尔曲线插值等,下面分别介绍它们的优缺点和使用场景。 一、线性插值
线性插值是最简单的插值…
驾驶人类未来:Apollo自动驾驶系统的影响力
前言 「作者主页」:雪碧有白泡泡 「个人网站」:雪碧的个人网站
ChatGPT体验地址 文章目录 前言1. 什么是自定义指令?2. Apollo中的自定义指令2.1 查询中的自定义指令2.2 变更操作中的自定义指令 3. 自定义指令的实现结论 文章目录 前言1. 什…
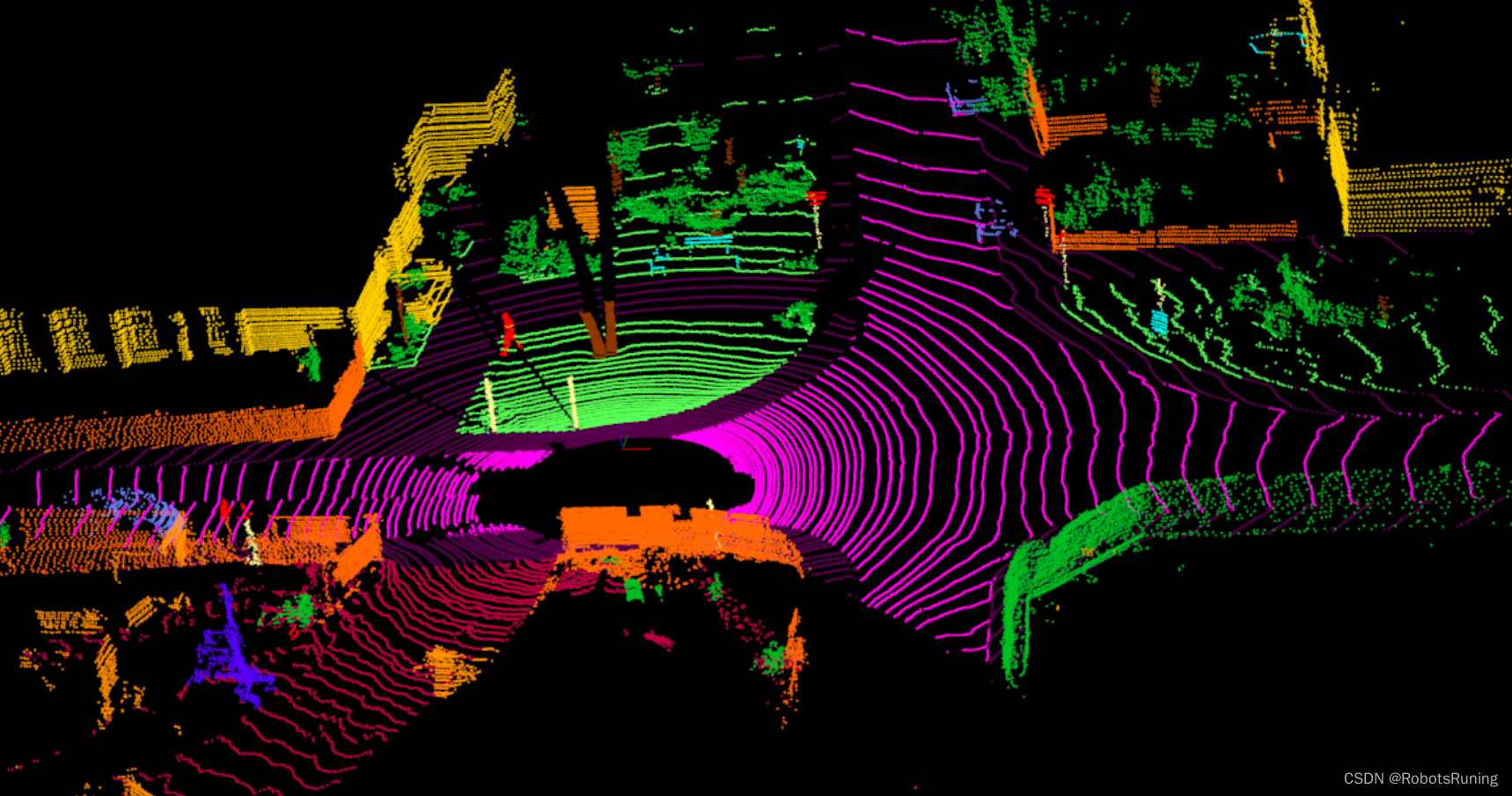
基于Rangenet Lib的自动驾驶LiDAR点云语义分割与可视化
这段代码是一个C程序,用于处理来自KITTI数据集的激光雷达(LiDAR)扫描数据。程序主要实现以下功能: 1. **读取和解析命令行参数**:使用Boost库中的program_options模块来定义和解析命令行参数。这包括扫描文件路径、模型…

仿真机器人-深度学习CV和激光雷达感知(项目2)day03【机器人简介与ROS基础】
文章目录 前言机器人简介机器人应用与前景机器人形态机器人的构成 ROS基础ROS的作用和特点ROS的运行机制ROS常用命令 前言 💫你好,我是辰chen,本文旨在准备考研复试或就业 💫本文内容是我为复试准备的第二个项目 💫欢迎…
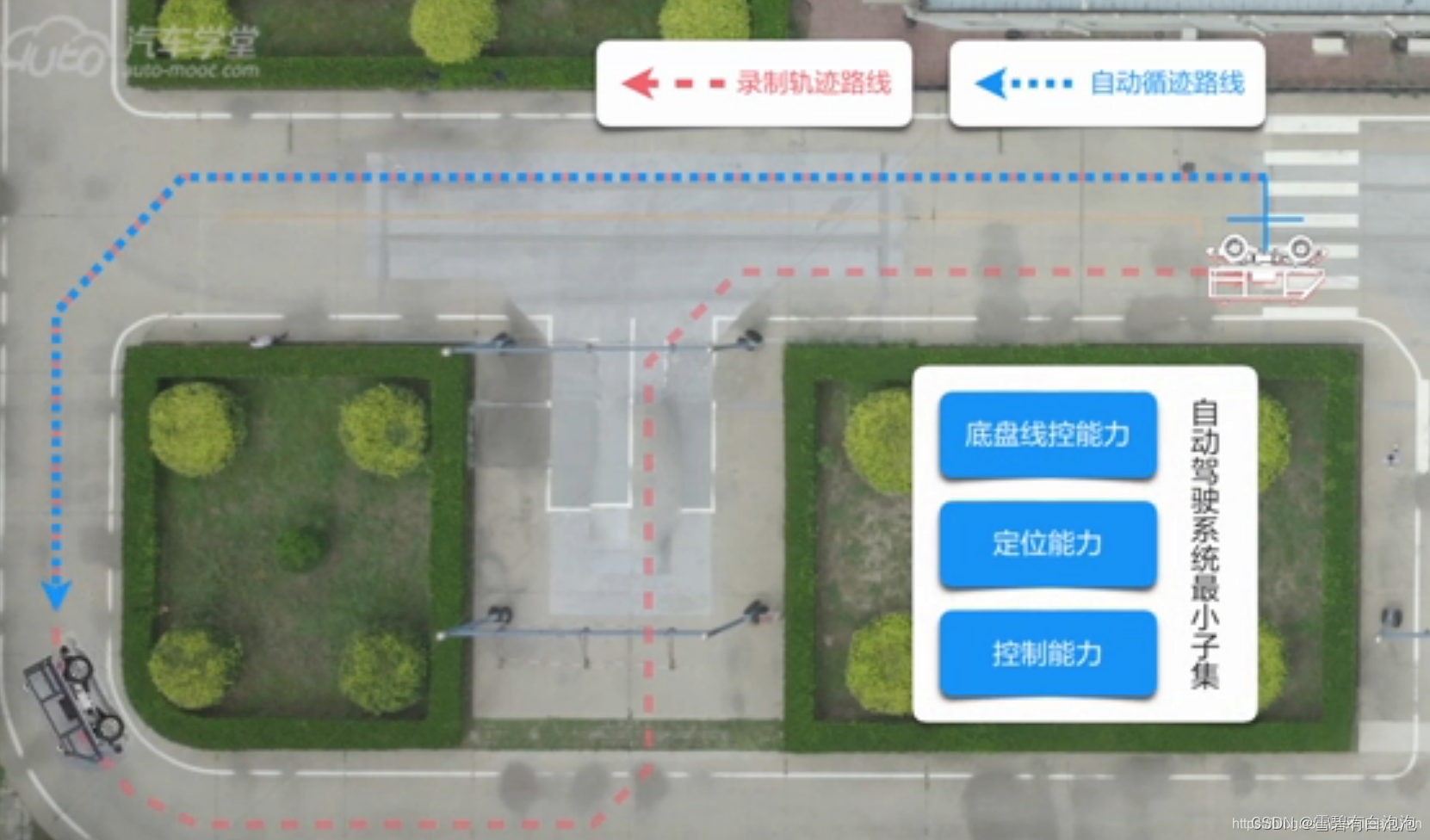
深度学习与Apollo自动驾驶:创造智能驾驶的未来
前言 「作者主页」:雪碧有白泡泡 「个人网站」:雪碧的个人网站
ChatGPT体验地址 文章目录 前言1. Apollo缓存层概述2. 缓存策略的重要性3. 缓存策略的配置4. 数据层次结构的管理结论 文章目录 前言1. Apollo缓存层概述2. 缓存策略的重要性3. 缓存策略的…
2024最新SLAM实习、秋招面经(百度、华为、小米、蔚来、理想、美团、阿里菜鸟……)
秋招已经结束,大大小小面了50场左右,就此开始慢慢整理一下,希望可以给看到的同学一点帮助~ 整理期间免费开放,整理完毕后打算设置成VIP可见,赚点小外快
个人BG:双非本,985硕。主要研究方向包括…
OpenPCDet框架解析文章导航
注意:本文章没有任何实质内容,主要是为OpenPCDet框架解析进行相应的文章导航,内容全部见《点云检测OpenPCDet专栏》 最近基于OpenPCDet来对PointPillars算法做一些实验,打算用一个完整的专栏来记录整个OpenPCDet的整体框架以及各个模块之间的结构。耗时一个多月,耗费精力较…
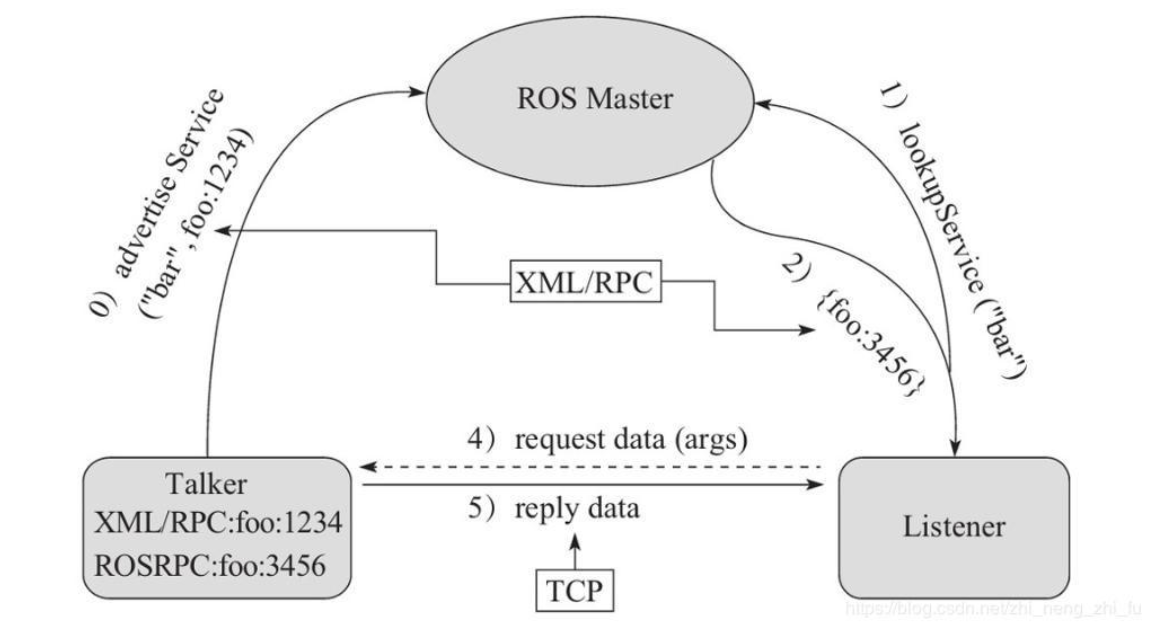
SLAM面试笔记(5) — ROS面试
目录
1 ROS概述
2 ROS通信机制
问题:服务通信概念
问题:服务通信理论模型
3 常见面试题
问题:roslaunch和rosrun区别?
问题:什么是ROS?
问题:ROS中的节点是什么?
问题&…
仿真机器人-深度学习CV和激光雷达感知(项目2)day7【ROS关键组件】
文章目录 前言Launch 文件了解 XML 文件Launch 文件作用Launch 文件常用标签实例--作业1的 Launch 文件TF Tree介绍发布坐标变换--海龟例程获取坐标变换--海龟自动跟随例程rqt_工作箱前言 💫你好,我是辰chen,本文旨在准备考研复试或就业 💫本文内容是我为复试准备的第二个…

Apollo Planning规划算法仿真调试(15):使用Vscode断点调试apollo的方法更新版
前言
使用Vscode断点调试apollo的方法之前在该专栏写过一篇分享,后台很多粉丝留言希望写的更详细一点,所以更新一版,尽量将配置过程详细描述,并且附上完整的配置文档。
Vscode 作为轻量化的调试工具深受广大开发者的青睐,虽然大家都用它来看新闻逛论坛炒股,但是用它开发…

比亚迪决定不给日系留“活路”了
本文来源:品驾/ 导读 /比亚迪的战争又打响了。2月10日,比亚迪秦PLUS DM-i2023冠军版正式上市,新车虽然改动不大,但起步价已至99800元,DM-i车型价格首次下探到10万以下这个区间。这场战争有那么可怕吗?有人还…
7000字概述-智能驾驶系统ADS-设计运行域ODD
1. 概述 本文和大家一起来学习智能驾驶系统智能操作设计域,本文中描述了可用于定义ADS的ODD的属性识别。一个ODD描述了一个ADS功能在道路类型、速度范围、照明条件(白天和/或晚上)、天气条件和其他操作限制方面的具体操作域。即使一辆车有多个ADS功能,但每个ADS功能的ODD都…

(02)Cartographer源码无死角解析-(09) gflags与glog简介、及其main函数讲解
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文…

遨博机械臂——ROS通讯机制
文章目录知识目标1. 遨博机械臂SDK二次开发接口2. 机械臂MoveIt!低级控制器配置3. aubo ROS中间件通讯机制知识目标
学习遨博机械臂SDK开发常用接口;学习MoveIt!功能包中机械臂控制器的配置通用流程;学习遨博ROS驱动与底层SDK与上层move_group之间的通讯…
(02)Cartographer源码无死角解析-(26) 阻塞队列BlockingQueue(),与OrderedMultiQueue成员函数
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
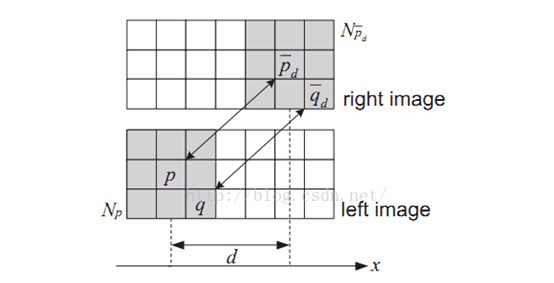
ORB-SLAM3算法学习—Frame构造—基于SAD滑窗的双目特征匹配
文章目录0总述1双目匹配1.1为左目每个特征点建立带状区域搜索表,限定搜索区域。(已提前极线校正)1.2对左目相机每个特征点,通过描述子在右目带状搜索区域找到匹配点1.3通过SAD滑窗得到匹配修正量bestincR1.4 做抛物线拟合找谷底得…
【ROS】—— ROS常用组件_TF坐标变换_多态坐标变换与TF坐标变换实操(十一)
文章目录前言1. 多态坐标变换1.1 发布方1.2 订阅方(C)1.3 订阅方(python)2. 坐标系关系查看3. TF坐标变换实操(C)3.1准备3.2 生成新的乌龟3.3 增加键盘控制3.4 发布方(发布两只乌龟的坐标信息)3.5 订阅方(解析坐标信息并生成速度信息)前言 📢本系列将依托赵虚左老师…

基于环视鱼眼相机的全景拼接
本文主要记录基于环视鱼眼相机的全景拼接过程中遇到的问题及其解决思路 代码来源:https://github.com/Leooncode/surround-view-system-introduction/blob/master/doc/doc.md 1、针对多个鱼眼相机连接问题 鱼眼相机为USB摄像头,与网络摄像头采集方式不同…
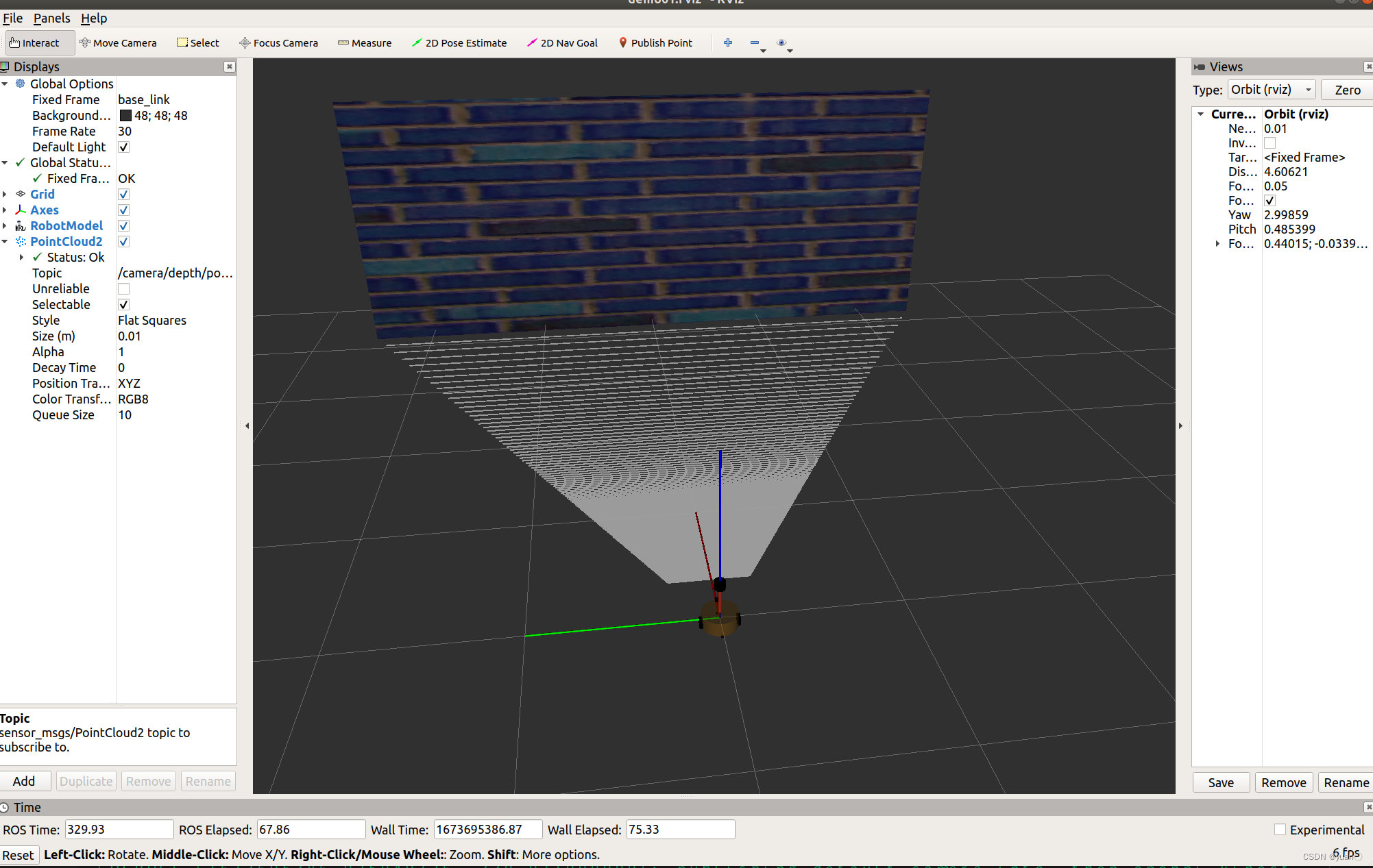
【ROS】—— 机器人系统仿真 —RDF、Gazebo与Rviz综合应用(十六)
文章目录前言1. 机器人运动控制以及里程计信息显示1.1 ros_control 简介1.2 运动控制实现流程(Gazebo)1.2.1 为 joint 添加传动装置以及控制器1.2.2 xacro文件集成1.2.3 启动 gazebo并控制机器人运动2. 雷达信息仿真以及显示2.1 新建 Xacro 文件,配置雷达传感器信息…

现代雷达车载应用——第3章 MIMO雷达技术 3.5节 汽车MIMO雷达的挑战
经典著作,值得一读,英文原版下载链接【免费】ModernRadarforAutomotiveApplications资源-CSDN文库。
3.5 汽车MIMO雷达的挑战 在本节中,我们讨论了汽车MIMO雷达的设计挑战,包括多径反射存在时的测角、波形正交性和高效高分辨率角…
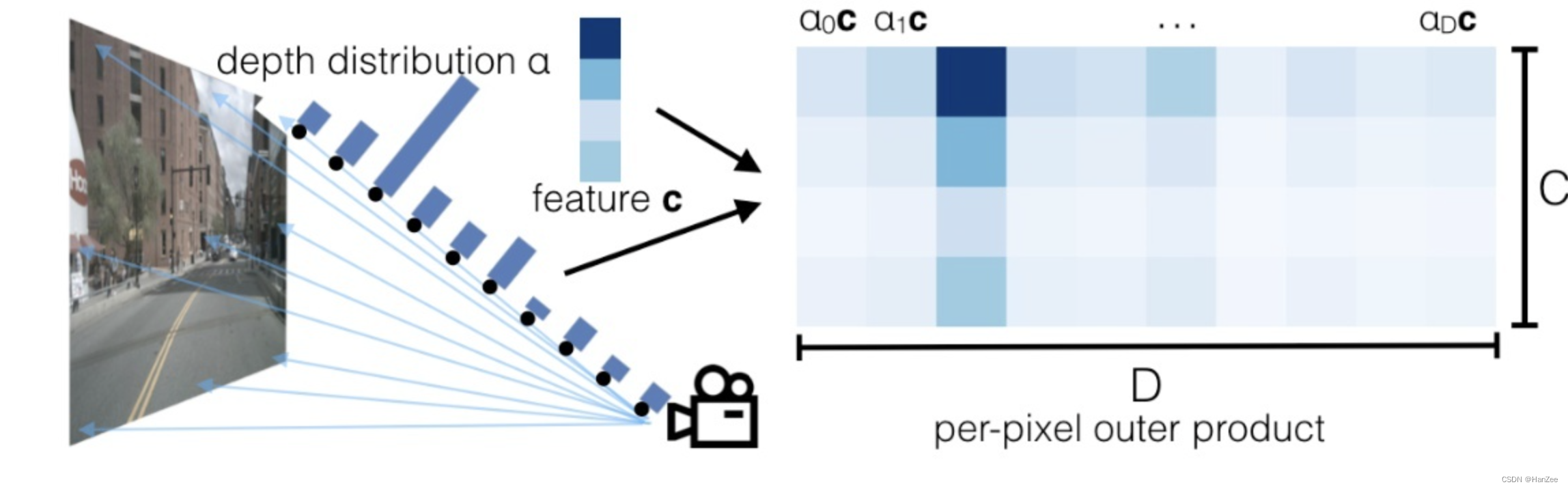
自动驾驶:BEV开山之作LSS(lift,splat,shoot)原理代码串讲
自动驾驶:BEV开山之作LSS(lift,splat,shoot)原理代码串讲前言Lift参数创建视锥CamEncodeSplat转换视锥坐标系Voxel Pooling总结前言 目前在自动驾驶领域,比较火的一类研究方向是基于采集到的环视图像信息,去构建BEV视角…
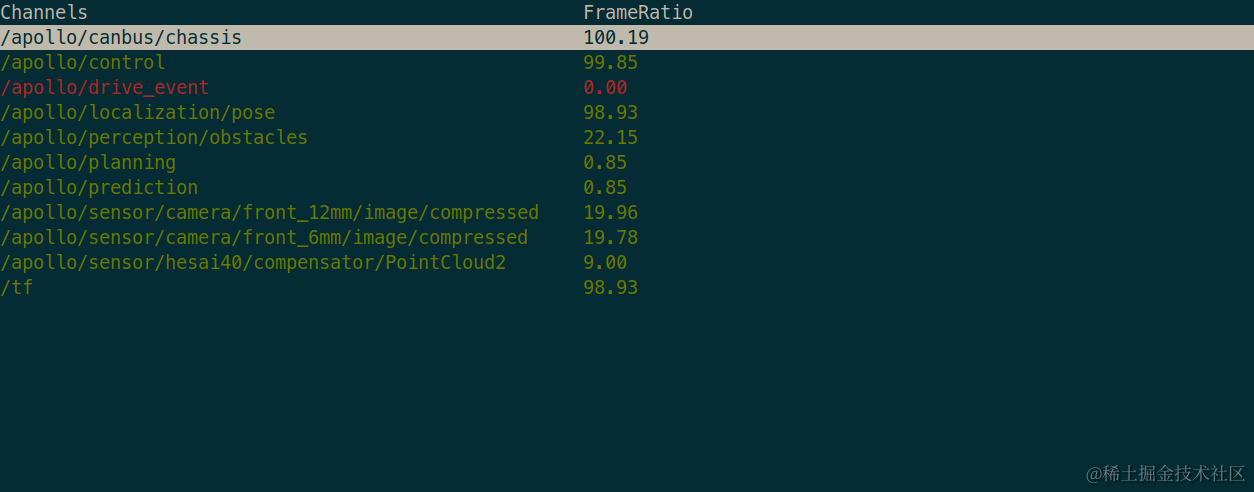
Apollo Cyber RT:引领实时操作系统在自动驾驶领域的创新
🎬 鸽芷咕:个人主页 🔥 个人专栏:《linux深造日志》《粉丝福利》 ⛺️生活的理想,就是为了理想的生活! ⛳️ 推荐 前些天发现了一个巨牛的人工智能学习网站,通俗易懂,风趣幽默,忍不住分享一下…

自动驾驶上路,还有“四个问题”需要解决
/ 导读 /随着科技的不断发展,自动驾驶技术正在成为汽车行业的一个热门话题。这项技术的目标是让车辆不再需要人类驾驶员的操控,从而提高交通安全性、减少交通拥堵并节省时间。但是,随着这项技术的不断发展,也出现了许多问题&#…
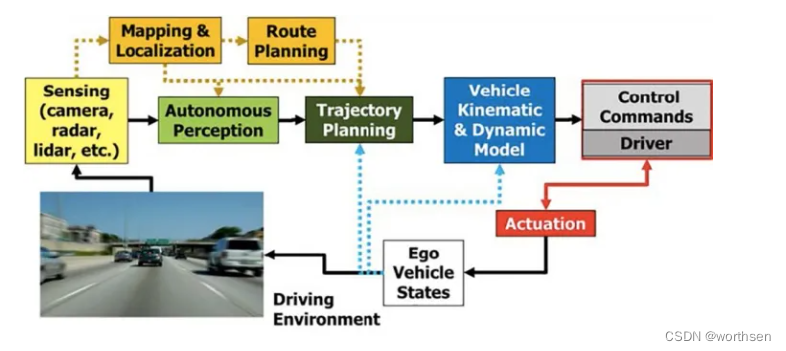
ADAS方案的简单比较
ADAS方案的简单比较 1 概述2 厂商Tesla硬件布局网络基础结构:HydraNet多头网络 NVIDIA百度(Apollo)版本历史硬件布局软件框架各版本框架 WaymoVolvo-Uber 3 芯片4 其他from [最全自动驾驶技术架构和综述](https://blog.csdn.net/buptgshengod…
【ROS2高级】实现一个服务器/客户端(C++)
一、说明 当节点使用服务进行通信时,发送数据请求的节点称为客户端节点,响应请求的节点称为服务节点。请求和响应的结构由 .srv 文件确定。这里使用的官网例子是一个简单的整数加法系统;一个节点请求两个整数的总和,另一个节点响应…

AutoCV第四课:Python基础
目录Python基础前言1.class1.1 基本介绍1.2 类的实例化1.3 魔法函数2.生成器2.1 定义2.2 生成器函数2.3 生成器表达式3.迭代器和可迭代对象3.1 迭代器3.2 可迭代对象3.3 区别和联系4.装饰器4.1 定义和语法4.2 类作为装饰器4.2.1 形式14.2.2 形式24.3 修饰类的成员函数4.4 常见装…
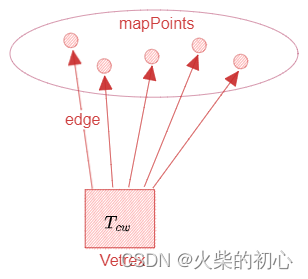
ORB_SLAM3_优化方法 Pose优化
PoseOptimization
PoseOptimization主要的作用是利用重投影优化单帧的位姿,主要用在Tracking的几种跟踪模式TrackWithMotionModel、TrackReferenceKeyFrame、 TrackLocalMap、Relocalization中
输入 优化变量观测帧的Pose帧的MapPoint帧的KeyPoint初始化 //创建优化器 g2o…
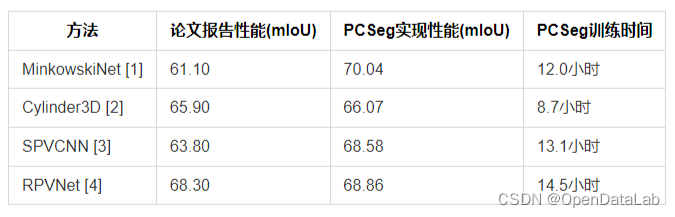
首个开源室外点云分割工具箱,提供多篇论文算法的强基线复现模型!(已开源)
PCSeg高性能点云分割开源框架强力来袭!支持多个公开数据集上多种SOTA算法高精度复现,训练时间更短、分割精度更高,开箱即用。室外点云全景分割研究必备,目前已开源,欢迎star一、PCSeg高性能点云分割开源框架点云语义分…
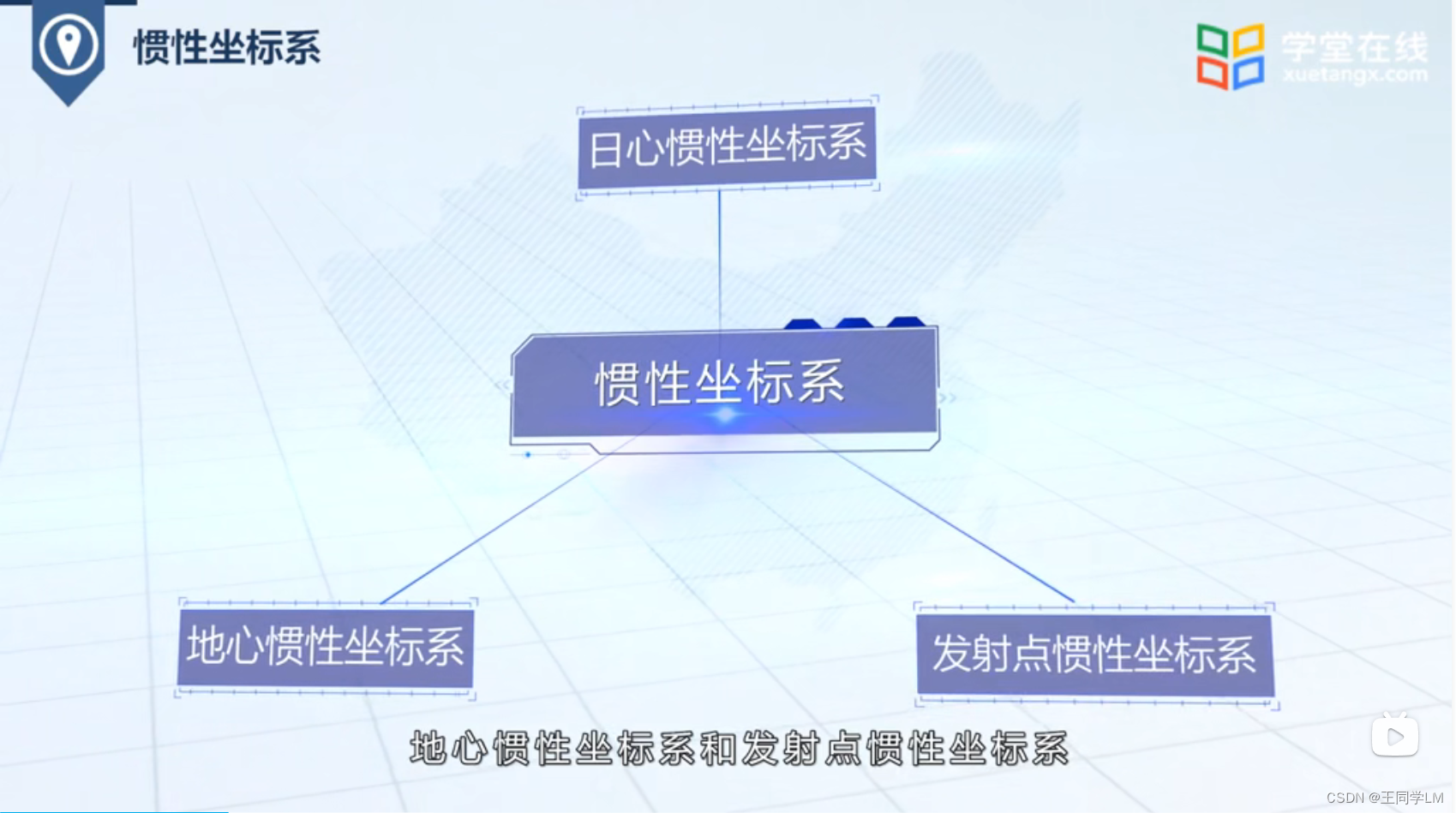
自动驾驶定位模块的作用是什么?为什么会有多种坐标系?
无人车,要实现自动驾驶,首先要知道自己的的位置。更准确的说法是:相对某个坐标系,确定车辆的位置和姿态。
这个坐标系可以是局部的: 也可以是全局坐标系:
这是更大维度上的坐标系。
坐标系确定之后,相对坐标原点和坐标轴,车上坐标系(本地坐标系),平移得到位置(x…
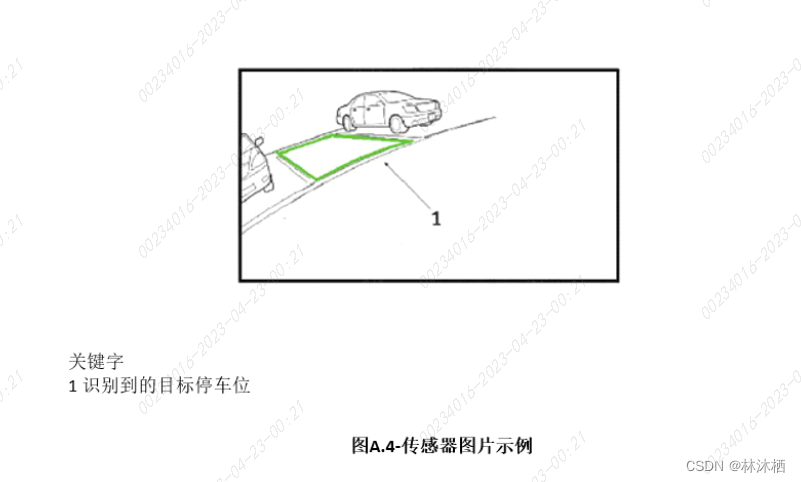
法规标准-ISO 16787标准解读
ISO 16787是做什么的?
ISO 16787全称为智能运输系统-辅助泊车系统(APS)-性能要求和测试程序,其中主要描述了对APS系统的功能要求及测试规范
APS类型
根据目标停车位类型将APS系统分为两类: 1)APS类型I&a…

自动驾驶TPM技术杂谈 ———— I-vista验收标准(试验规程)
文章目录 术语介绍试验准备场地要求环境要求精度要求边界车辆&路沿石 试验方法能力试验双边界车辆平行车位白色标线平行车位双边界车辆垂直车位白色标线垂直车位方柱垂直车位双边界车辆斜向车位白色标线斜向车位 新功能评价平行车位远程操控泊入泊出试验垂直车位远程操控泊…
ROS学习笔记(二):计算图、节点、rosnode、rosrun与roslaunch
ROS学习笔记(二):计算图、节点、rosnode、rosrun与roslaunch计算图ROS节点rosnoderosrunroslaunchroslaunch简介roslaunch标签\<launch\>:根元素\<node\>:启动节点\<include\>:嵌套复用\…
论文解读 - 城市自动驾驶车辆运动规划与控制技术综述 (第3部分)
文章目录🚗 IV. Mothon Planning(运动规划)🔴 A. Path Planning(路径规划)🟠 B. Trajectory Planning(轨迹规划)🟡 C. Variational Methods(变分法…
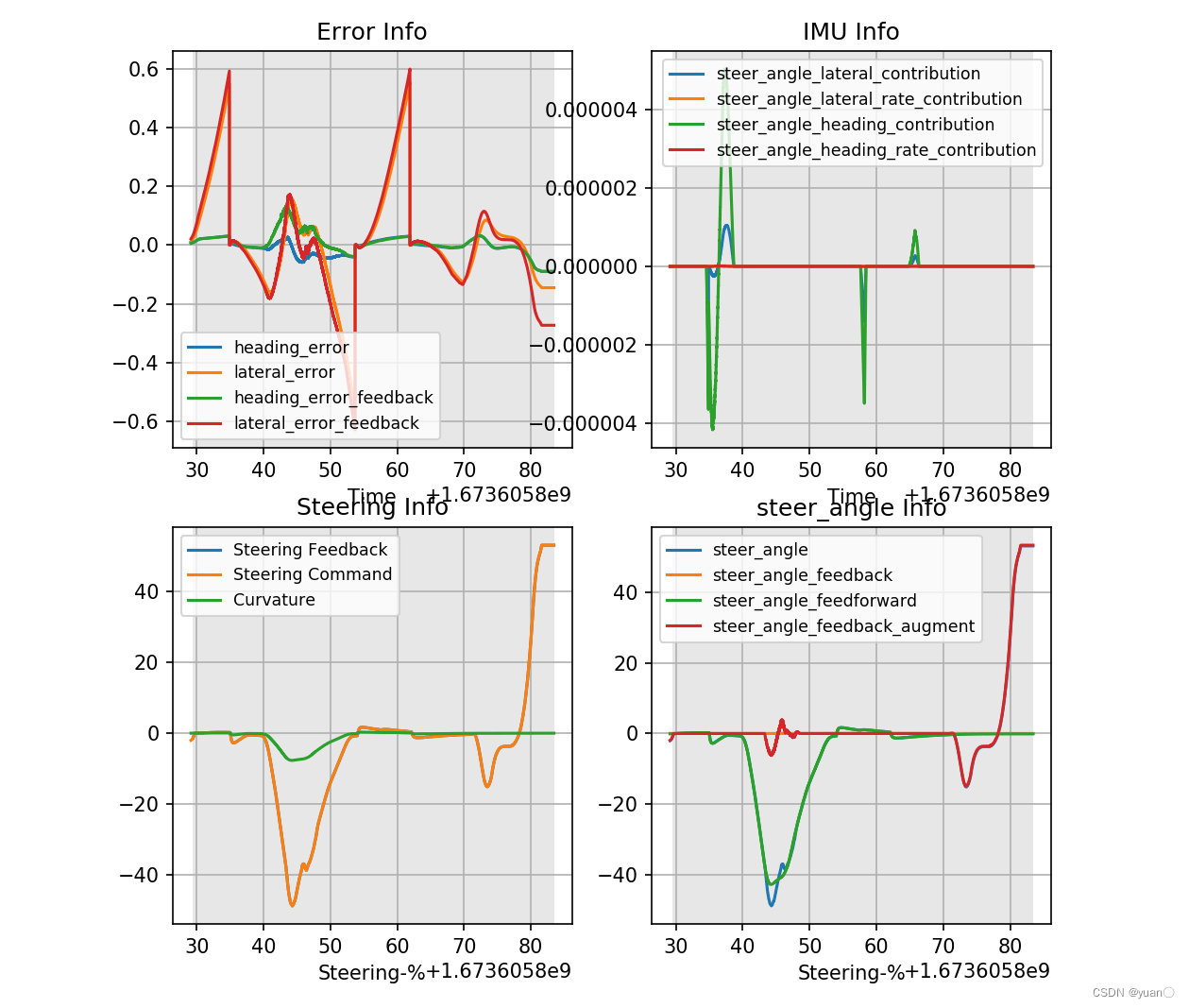
Apollo星火计划学习笔记——Control 专项讲解(LQR)
文章目录1. 算法相关基础1.1 一阶倒立摆1.2 二自由度车辆横向跟踪偏差模型1.3 车辆横向跟踪偏差模型1.4 车辆横向跟踪偏差倒车模型1.5 轮胎侧偏角与侧偏刚度1.6 LQR 线性二次型问题:2. LQR代码解析2.1 WriteHeaders(调试过程中的状态量)2.2 LatControlle…

自动驾驶感知——图像数据处理数学方法
文章目录1. 二值化操作2. 卷积操作3. 均值滤波4. 高斯滤波5. 图像梯度算子5.1 Prewitt梯度算子5.2 Sobel梯度算子5.3 Laplace二阶梯度6. 边缘特征点提取算子7. 基于规则的特征点提取8. 最小二乘拟合方法9. RANSAC曲线拟合10. Hough Transform 霍夫变换11. 基于学习的特征点提取…
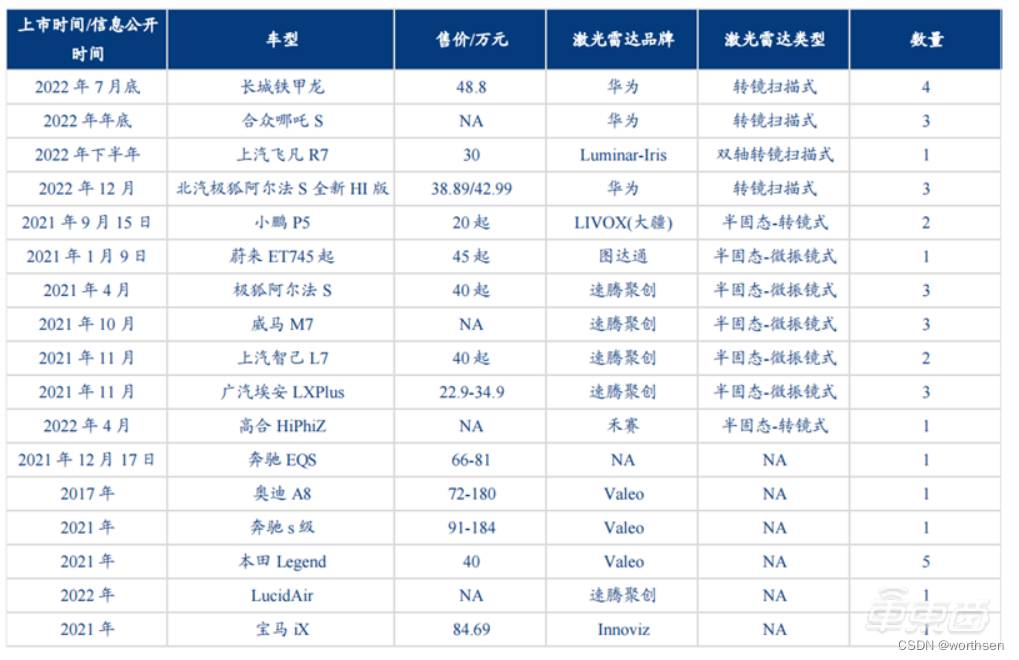
自动驾驶介绍、应用、前景
自动驾驶介绍、应用、前景1 介绍1.1 定义1.2 作用1.3 发展历程1.4 分类23年初竞争格局1.5 顾虑1.6 前景2 产业链现状2.1 芯片2.2 仿真3 技术路线3.1 是否交互3.1.1 单车智能3.1.2 车路协同3.2 主传感器区分3.2.1 纯视觉3.2.2 混合传感器3.3 前装还是后装3.3.1 前装3.3.2 后装4 …
自动驾驶感知——毫米波雷达
文章目录1. 雷达的基本概念1.1 毫米波雷达分类1.2 信息的传输1.3 毫米波雷达的信号频段1.4 毫米波雷达工作原理1.4.1 毫米波雷达测速测距的数学原理1.4.2 毫米波雷达测角度的数学原理1.4.3 硬件接口1.4.4 关键零部件1.4.5 数据的协议与格式1.5 车载毫米波雷达的重要参数1.6 车载…

自动驾驶感知——激光雷达物体检测算法
文章目录1. 基于激光雷达的物体检测1.1 物体检测的输入与输出1.2 点云数据库1.3 激光雷达物体检测算法1.3.1 点视图1.3.1.1 PointNet1.3.1.2 PointNet1.3.1.3 Point-RCNN1.3.1.4 3D-SSD1.3.1.5 总结和对比1.3.2 俯视图1.3.2.1 VoxelNet1.3.2.2 SECOND1.3.2.3 PIXOR1.3.2.4 AFDe…

3D点云障碍物标注案例
3D点云标注内容
标注范围内的类别列表上的所有物体都需要标注,主要是道路上正在行驶和静止的参与者(包括行人、车辆等), 以及路上基本的交通设施
目标物ID
目标物 ID 应在前后帧中保持一致。一个对象只有一个目标ID,不能重复使用
标注要求…
(02)Cartographer源码无死角解析-(55) 2D后端优化→ComputeLocalToGlobalTransform()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…

5月14日第壹简报,星期日,农历三月廿五
5月14日第壹简报,星期日,农历三月廿五坚持阅读,静待花开1. 福布斯中国锂电产业链TOP100发布,宁德时代、赣锋锂业、比亚迪等入选。2. 平均降价84%!山东、湖南、江西等多地骨科脊柱类耗材集采中选结果落地。3. 世界旅游组…
辅助驾驶功能开发-功能规范篇(16)-2-领航辅助系统NAP-自动变道-1
书接上回
2.3.4.自动变道 当车辆处于导航引导模式NOA功能时(即车辆横向控制功能激活),且车速大于40km/h,驾驶员按下转向灯拨杆或系统判断当前有变道需要时,自动变道系统通过对车道线、自车道前方目标距离、邻近车道前后方目标距离等环境条件进行判断,在转向灯亮起3s后控…
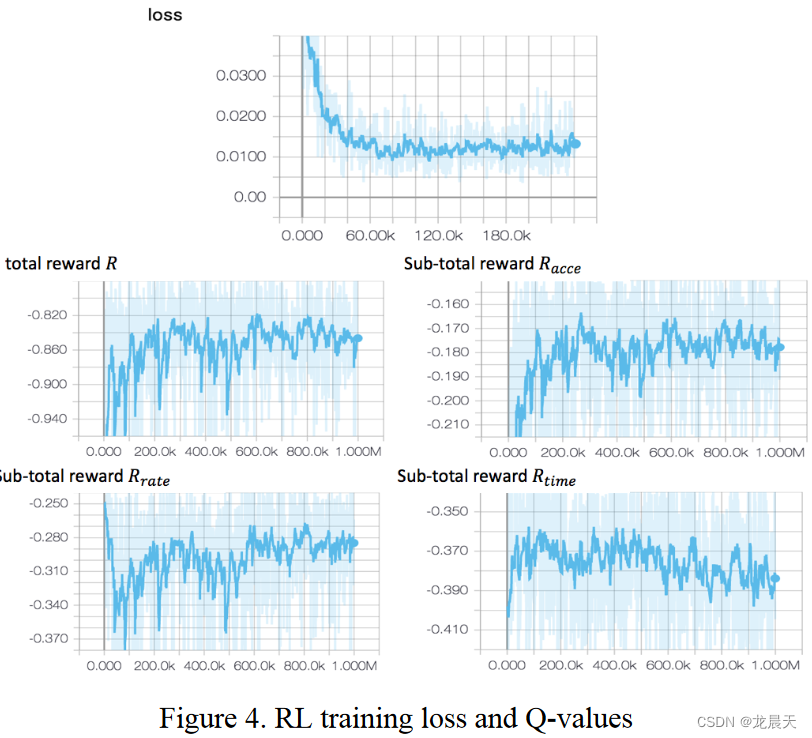
一种基于强化学习的自动变道机动方法
文章目录摘要前言相关的工作方法论动作空间奖励函数设计Q学习仿真结果结论摘要
变道是一项至关重要的车辆操作,需要与周围车辆协调。建立在基于规则的模型上的自动换道功能可能在预定义的操作条件下表现良好,但在遇到意外情况时可能容易失败。在我们的研…

OpenPCDet系列 | 5.4.3 DenseHead中的AxisAlignedTargetAssigner正负样本分配模块
文章目录 AxisAlignedTargetAssigner模块assign_targets处理流程1. 提取有效gt信息2. 提取需要处理的类别信息3. 帧信息整合4. 批信息整合 assign_targets_single处理流程1. 构建每个anchor的正负样本label分配2. 构建每个anchor的正负样本编码信息bbox_targets分配3. 构建每个…
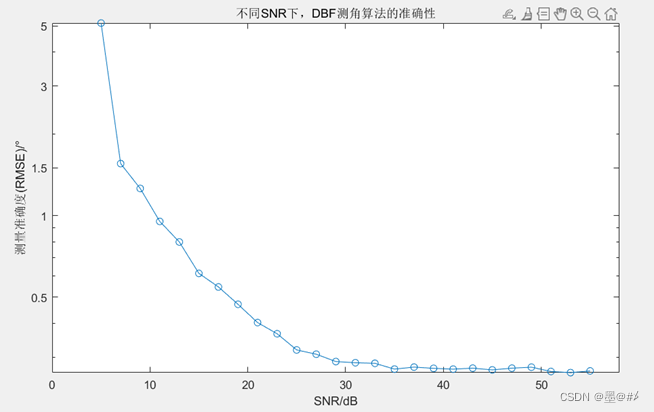
关于蒙特卡罗方法及其在信号处理中的应用
说明 最近想探讨一下毫米波雷达测量准确度及其改善的问题,这个话题下可供讨论的问题有很多,蒙特卡罗方法(或者说基于蒙特卡罗方法对测量准确度以及精度的评估)是其中之一,该方法是一个十分有效的工具,在科研(发paper)上也是不可少…

2023年车联网与自动驾驶车辆国际研讨会(SoCAV 2023)
重要信息
会议网址:www.socav.org
会议时间:2023年4月21-23日
召开地点:深圳
截稿时间:2023年3月30日
录用通知:投稿后2周内
收录检索:EI,Scopus ★2023年车联网与自动驾驶车辆国际研讨会࿰…
(02)Cartographer源码无死角解析-(58) 2D后端优化→PoseGraph2D::AppendNode()细节分析
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
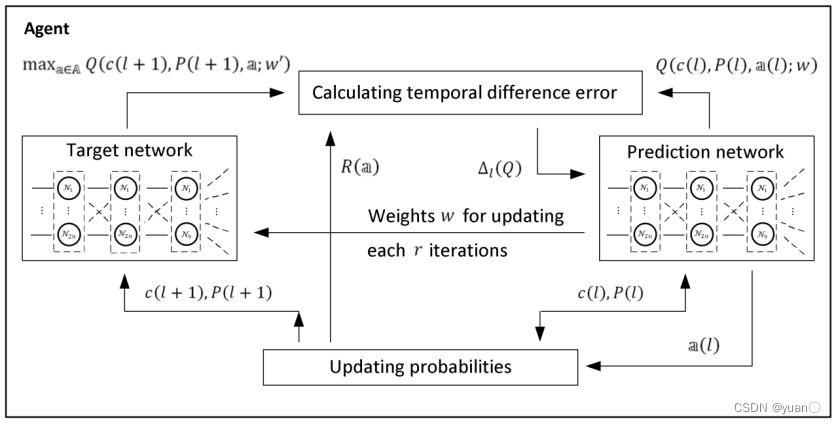
自动驾驶目标检测项目实战(一)—基于深度学习框架yolov的交通标志检测
自动驾驶目标检测项目实战——基于深度学习框架yolov的交通标志检测
目前目标检测算法有很多,流行的就有faster-rnn和yolov,本文使用了几年前的yolov3框架进行训练,效果还是很好,当然也可以使用更高版本的Yolov进行实战。本代码使…
ROS学习笔记(六):TF坐标变换
ROS学习笔记(六):TF坐标变换TF的基本知识TF工具tf_monitortf_echostatic_transform_publisherview_frames创建TF广播器创建TF监听器TF的基本知识
TF是一个让用户随时间跟踪多个坐标系的功能包,它使用树形数据结构,根据…

carla与ros2的自动驾驶算法-planning与control算法开发与仿真
欢迎仪式 carla与ros2的自动驾驶算法-planning与control算法开发与仿真欢迎大家来到自动驾驶Player(L5Player)的自动驾驶算法与仿真空间,在这个空间我们将一起完成这些事情:
控制算法构建基础模块并仿真调试:PID、LQR、Stanley 、MPC、滑膜控…

项目实训 - 智能车系统 - 第十一周记录
项目实训 - 智能车系统 - 第十一周记录
日期:5.2 – 5.8
项目进度
本周工作进展:
信号量版本测试tcp版本的可视化
1、信号量版本通信机制
通信机制-新: 一写一读 当一个话题对应多个订阅者时,拆分成多个话题(针对…
cam_lidar_calibration代码详解(二)优化计算过程
目录
一、openga.h解析
二、optimiser.h解析
三、optimiser.cpp解析 先对特征点提取和优化过程进行了梳理,见博客:
cam_lidar_calibration代码详解(一)采样优化部分_可见一班的博客-CSDN博客
这篇博…

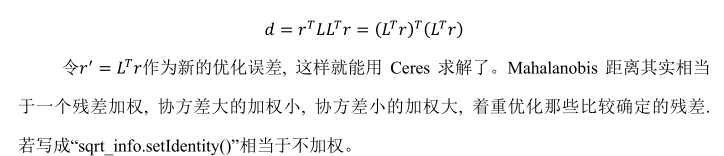
VINS-MONO代码解读---processIMU()+intergrationBase类+imu_factor.h
本节主要包含IMU预积分的残差、Jacobian和协方差,主要代码部分为processIMU()intergrationBase类imu_factor.h processIMU()实现了IMU的预积分,通过中值积分得到当前PQV作为优化初值
本文目录
第一个问题,为什么要IM…
同一纬度地区经度相差一度相差多少米?
1、在纬度相等的情况下:
经度每隔0.00001度,距离相差约1米;
每隔0.0001度,距离相差约10米;
每隔0.001度,距离相差约100米; 每隔0.01度,距离相差约1000米;
每隔0.1度&…

(02)Cartographer源码无死角解析-(48) 2D点云扫描匹配→扫描匹配基本原理讲解,代码总体框架梳理AddAccumulatedRangeData()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
(02)Cartographer源码无死角解析-(46) 2D栅格地图→RayToPixelMask()与贝汉明(Bresenham)算法
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末正下方中心提供了本…
辅助驾驶功能开发-功能规范篇(16)-2-领航辅助系统NAP-安全接管策略
书接上回
2.3.6安全接管策略 为保障辅助驾驶车辆的安全性,在辅助驾驶系统运行过程中,对出现的影响系统稳定性的异常情况,制定对应的安全接管策略。 异常情况可能包括:系统传感器、控制器、执行器、电源、通讯、备份系统等的故障或失效,驾驶员异常行为(如不响应车辆的接管…
(02)Cartographer源码无死角解析-(31) LocalTrajectoryBuilder2D::AddRangeData()→点云数据重力对齐,Z轴过滤
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文 末 正 下 方 中 心 提…
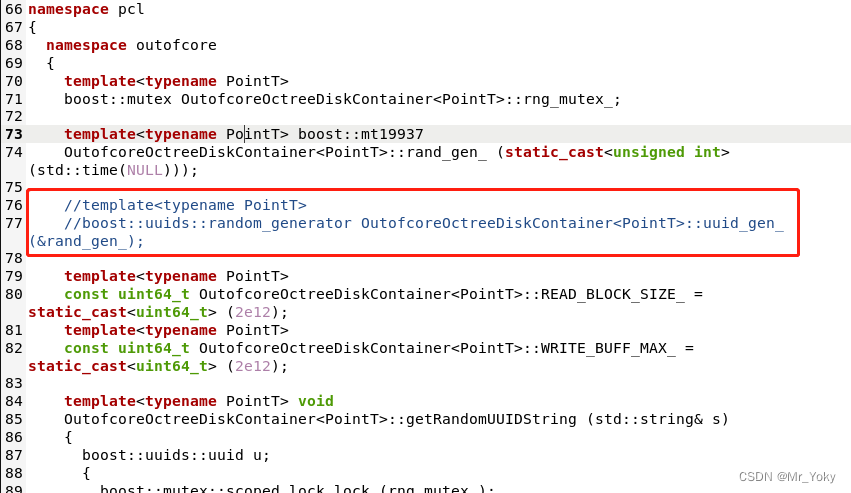
感知程序从ros切换到cyber_rt框架下,pcl相关问题
1.在ubuntu20.04下,原感知程序需要的是pcl1.8.1,车上其他程序使用的是pcl.1.10.0或者pcl1.10.0,在编译pcl1.10.0时会编译通不过,而pcl1.10.1可以顺利编译通过,安装pcl1.8.1时遇到的问题可能如下,及对应的修…

法规标准-GB/T 39323标准解读(2020版)
GB/T 39323是做什么的?
GB/T 39323全称为乘用车车道保持辅助(LKA)系统性能要求及试验方法,其中主要描述了LKA系统的功能要求及测试要求
一般要求
1.系统应能在状态良好的车道边线环境下识别车辆与车道边线的相对位置,辅助驾驶员将车辆保持…
(02)Cartographer源码无死角解析-(26) OrderedMultiQueue::Dispatch()→数据排序分发
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
(02)Cartographer源码无死角解析-(25) 阻塞队列BlockingQueue,与OrderedMultiQueue成员函数
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
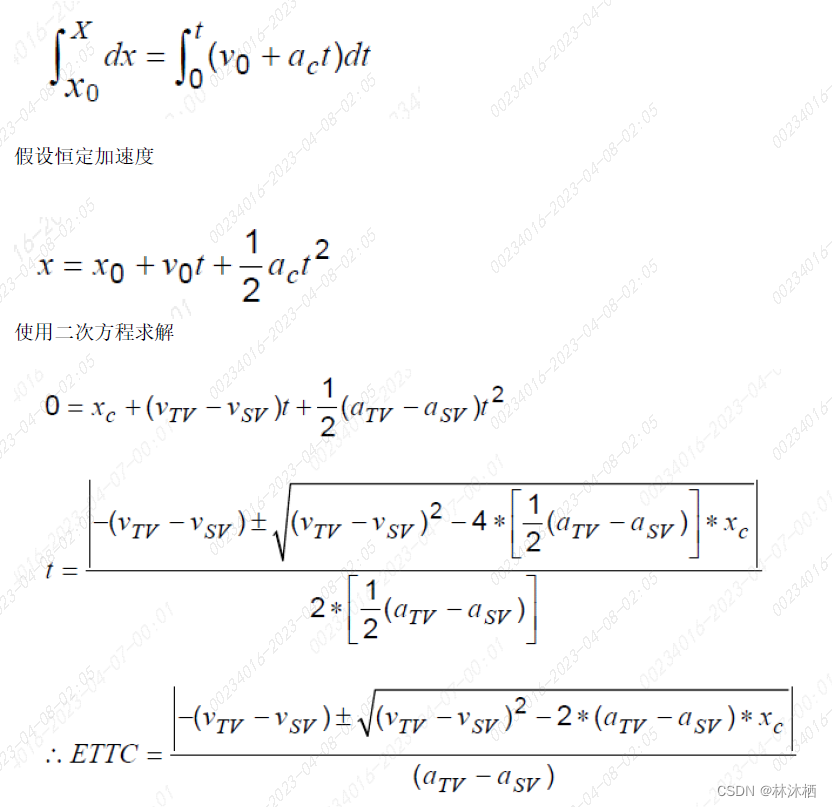
法规标准-ISO 22839标准解读(2013版)
ISO 22839是做什么的?
ISO 22839全名为智能交通系统-前方车辆碰撞缓解系统(FVCMS)-性能要求和测试步骤,其中主要是对FVCMS系统的功能要求、性能要求及测试步骤进行了介绍
FVCMS功能分类
按曲线半径分类
根据曲线半径能力对系统进行分类,如…

什么是半实物仿真平台自动驾驶半实物仿真平台有哪些?
文章目录 半实物仿真平台介绍自动驾驶半实物仿真平台介绍1.CARLA2.AirSim3.LGSVL Simulator 半实物仿真平台介绍
半实物仿真平台是一种综合利用虚拟仿真和实际硬件设备的仿真系统。它将虚拟环境和真实硬件设备结合起来,旨在提供更真实、更准确的仿真体验。
在半实…
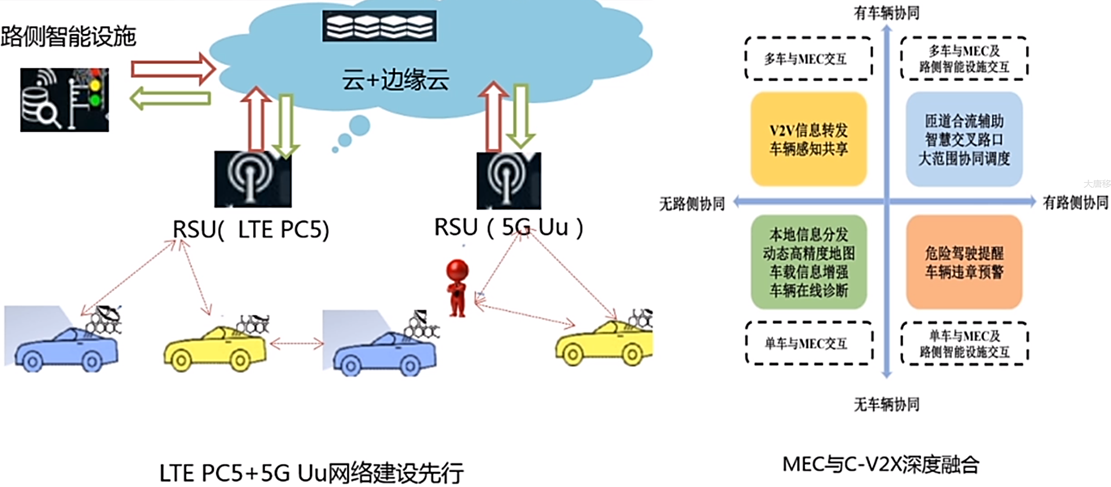
【大唐杯备考】——自动驾驶与车联网发展现状与产业趋势(学习笔记)
📖 前言:本期介绍自动驾驶与车联网发展现状与产业趋势。 目录🕒 1. 自动驾驶发展现状🕘 1.1 分级🕘 1.2 优势🕘 1.3 应用场景🕘 1.4 产业链🕤 1.4.1 ADAS系统主要功能🕤 …

(02)Cartographer源码无死角解析-(17) SensorBridge→里程计数据坐标系变换与TfBridge分析
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…

(02)Cartographer源码无死角解析-(05) 程序运行常见错误与解决→模拟错误
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末正…
(02)Cartographer源码无死角解析-(36) PoseExtrapolator→AddImuData()、TrimOdometryData()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
在Ubuntu20.04下安装ROS2 Galactic
在Ubuntu20.04下安装ROS2 Galactic
可以参考: https://docs.ros.org/en/galactic/进行ROS2 Galactic的安装。
1、测试语言环境
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALLen_US.UTF-8 LANGen_US.UT…

史上最简SLAM零基础解读(10.3) - g2o(图优化)→边(Edge)编程细节
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始 文末正下方中心提供了本人联系方式,点击本人照片即可显示WX→官方认证{\color{blue}{文末正下方中心}提供了本人 \color{red} 联系方式,\color{blue}点击本人照片即可显示WX→官方认证}文末正…
(01)ORB-SLAM2源码无死角解析-(61) 闭环线程→闭环矫正: CorrectLoop→全代码注释
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
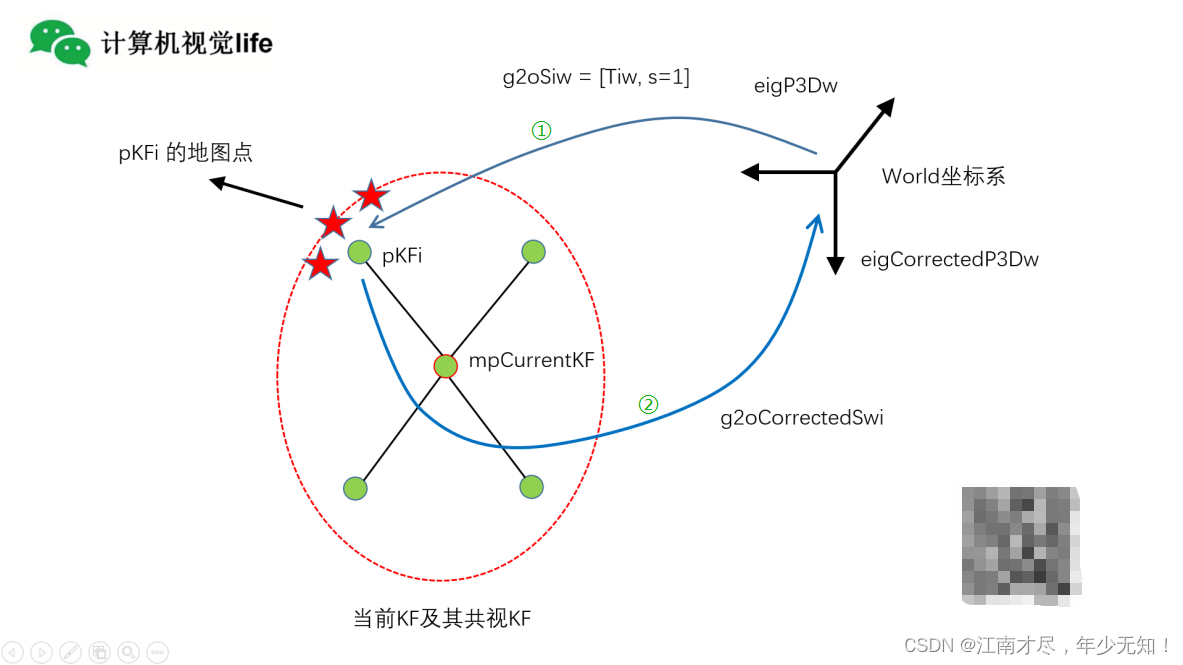
(01)ORB-SLAM2源码无死角解析-(59) 闭环线程→闭环矫正: CorrectLoop→位姿传播,地图点矫正
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

自动驾驶车载MCU开发修炼秘籍
目录 车载MCU开发修炼秘籍1、恩智浦 S32K1XX系列2、英飞凌 AURIX TC3XX3、嵌入式实时操作系统-FreeRTOS4、车载实时操作系统-AUTOSAR 车载MCU开发修炼秘籍
1、恩智浦 S32K1XX系列 S32K14X学习笔记(一)–S32K汽车MCU资源总结 S32K14X学习笔记:…
多传感器融合SLAM --- 9.LIO-SAM如何运行、运行节点介绍
目录 1 LIO-SAM如何运行起来的
1.1 run.launch --- LIO-SAM主节点
1.2 module_loam.launch ---- 代码!启动!
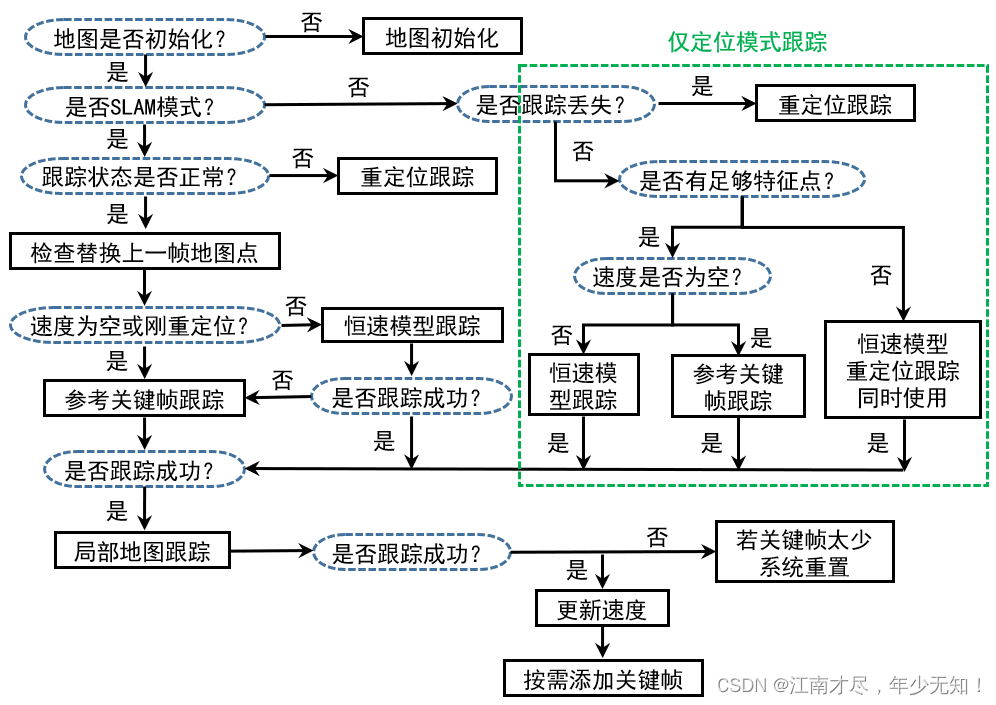
(01)ORB-SLAM2源码无死角解析-(34) 跟踪线程→初步了解跟踪线程,参考关键帧追踪TrackReferenceKeyFrame()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
史上最简SLAM零基础解读(5) - Homography,Fundamental,Essential深入浅出→了解适用场景:共面、非共面、仅旋转
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始 有兴趣的朋友可以加微信 17575010159 相互讨论技术 - 文末公众号也可关注 一、前言
通过文首的一系列博客,相信大家对于 Homography,Fundamental,Essential 矩阵已经有了一一定认知,比如 单应…
(01)ORB-SLAM2源码无死角解析-(21) 基本矩阵Fundamental→本质矩阵Essential 分解恢复 Rt
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

Sparse Fuse Dense: 向高质量的深度补全3D检测迈进
点云的稀疏性:在远距离和遮挡区域提供的信息较差,导致难以生成精确的3D边界框。
出现了多模态融合。
图像和点云的不同表示方式使得它们难以融合,导致性能不佳。
论文提出了一种新颖的多模态框架SFD(Sparse Fuse Dense…
辅助驾驶功能开发-功能规范篇(25)-1-全景影像AVM规范
1.术语Terminology
1.1.定义Definition
1) 需求 ID: 每条需求的 ID 必须唯一,如 REQ_5_001,代表 M-5 的第一条需求; 2) Use case:使用实例,参与者与系统之间一系列可能的交互行为序列的集合,以实现用户使用系统 所要达到的特定目标;
3) 参与者:与系统发生交互作用…

2.2ORBSLAM3之几种特征点提取方法
0.简介
本节对ORB特征、SIFT特征、SURF特征、Harris角点、Shi-Tomas角点的提取与描述子计算原理进行总结,其中Harris角点、Shi-Tomas角点是关键点,没有对应的描述子,一般用于光流跟踪(Vins系列算法)。
综合所有的特征检测算法来看ÿ…
《Apollo 智能驾驶进阶课程》四、感知
1. 感知概貌 2. 传感器和标定
激光雷达:主动式,发射功率限制 Camera: 被动式,受到光照影响大 Radar : 多普勒效率 相对速度 超声波: 感知距离有限,倒车时使用。 … 最后设备还在研发过程中。 PnP问题,解决标定。
IC…

旷视研究院获 CVPR 2023 自动驾驶国际挑战赛 OpenLane Topology 赛道冠军
近日,为期三个月的 CVPR 2023 自动驾驶国际挑战赛比赛结果揭晓。旷视研究院在OpenLane Topology 赛道中击败 30 余支国内外队伍,夺得冠军。 自动驾驶技术已经渗透到人们的日常生活中,但是传统的感知方法仍不能满足大家对 L5 级自动驾驶的追逐…

(01)ORB-SLAM2源码无死角解析-(09)ORBextractor::operator()→FAST关键点均匀化
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(08)ORBextractor::operator()→FAST关键点提取
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(01) 环境搭建,demo运行,ROS一键安装_清除各种疑难杂症
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析-接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin_…
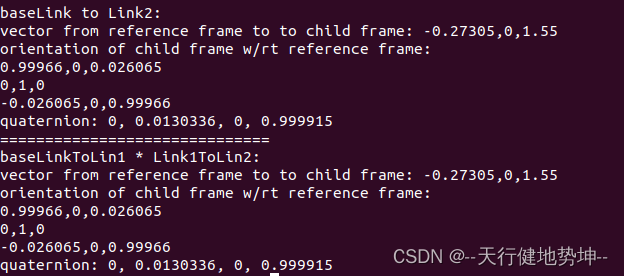
ROS中的坐标转换1
1、坐标转换
坐标转换是指坐标系之间的平移以及旋转关系,如坐标系A,B,C。A,B之间存在一个转换关系 TBAT_{B}^{A}TBA,B与C之间存在转换关系TCBT_{C}^{B}TCB,我们知道了B相对于A的关系,C相对于B的转换关系,同样我们可以A&a…
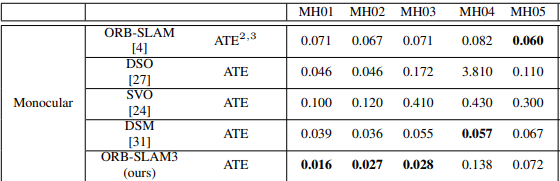
EVO测试ORB-SLAM3数据集记录
evo可以进行数据格式转化、曲线颜色配置、轨迹导出等多种功能,详细请参考evo在github上的wiki: https://github.com/MichaelGrupp/evo/wiki
用 python2调用ORB-SLAM3自带的evaluate_ate_scale.py
python2 evaluate_ate.py --save alignedTrajectory_at…

自动驾驶方案及相关对标
华为:
2021年4月18日,在华为智能汽车解决方案BU新品发布会上,华为智能汽车解决方案BU总裁王军表示,华为要持续加大对汽车行业的投入,今年在研发上的投资将达到10亿美元,未来每年保持30%左右增长࿰…
特斯拉E/E整车电子电气创新架构分析
前言... 2
5.1 特斯拉E/E整车电子电气架构发展历程... 3
5.1.1 电子电气架构发展趋势... 3
5.1.2特斯拉Model X 网络拓扑(2015年9月发布)... 3
5.1.3特斯拉Model 3 网络拓扑(2017年9月发布)... 4
5.1.4竞品车型网络拓扑图对比... 5
5.1.4.1 宝马iX3网络拓扑结构分析.…
【实战项目开发技术分享】机器人安全通过狭窄区域的方案
文章目录 前言一、Costmap1.1 Costmap类型1.2 Costmap组成1.3 实现思路1.3.1 动态调整膨胀层参数1.3.2 自定义costmap plugins二、Voronoi图2.1 Voronoi图简介2.2 实现思路三、二次规划3.1 二次规划简介3.2 实现思路四、总结前言
在机器人的应用领域中,有时会遇到需要机器人通…

自动驾驶TPM技术杂谈 ———— 车辆分类
文章目录 机动车规格机动车结构机动车使用性质机动车和挂车分类接近角定义离去角定义纵向通过角定义离地间隙定义前后轴之间的离地间隙轴下离地间隙 机动车规格
机动车规格分类 分类 说明 汽车 载客汽车 大型 车长大于或等于 6000mm 或者乘坐人数大于或等于20 人的载客汽车。 …
自动驾驶行业观察之2023上海车展-----智驾供应链(1)
芯片供应商发展
地平线:发布新一代BPU智能计算架构,宣布与采埃孚合作
业务数据:
征程芯片总出货量:地平线公布征程芯片出货量突破了300万片,与超过20家车企共计120多款车型达成量产定点合作。
J5出货量:…
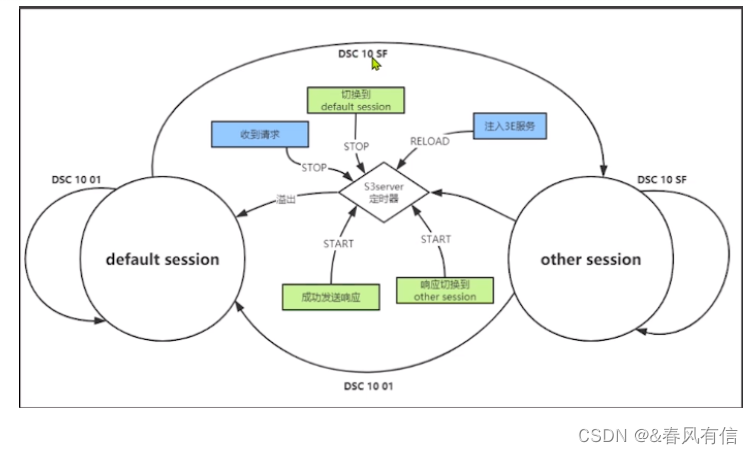
【UDS】ISO15765-2之诊断时间参数
文章目录 简介分类1. P2client2. P2server3. P2*client4. P2*server5. S3client5. S3server 总结 ->返回总目录<-
简介
诊断层包含六种定时器时间参数:P2client, P2client, P2server, P2server, S3client, S3server。 相对来说,比较好理解。就是…
2022年道路运输企业主要负责人考试题及道路运输企业主要负责人最新解析
题库来源:安全生产模拟考试一点通公众号小程序
安全生产模拟考试一点通:2022年道路运输企业主要负责人考试题为正在备考道路运输企业主要负责人操作证的学员准备的理论考试专题,每个月更新的道路运输企业主要负责人最新解析祝您顺利通过道路…
2021-10-122021年汽车驾驶员(技师)考试及汽车驾驶员(技师)考试内容
题库来源:安全生产模拟考试一点通公众号小程序
安全生产模拟考试一点通:汽车驾驶员(技师)考试参考答案及汽车驾驶员(技师)考试试题解析是安全生产模拟考试一点通题库老师及汽车驾驶员(技师&…
2021-10-042021年汽车驾驶员(技师)报名考试及汽车驾驶员(技师)考试内容
题库来源:安全生产模拟考试一点通公众号小程序
安全生产模拟考试一点通:汽车驾驶员(技师)报名考试是安全生产模拟考试一点通总题库中生成的一套汽车驾驶员(技师)考试内容,安全生产模拟考试一点…
[学习笔记-C++篇]自我挑战30天熟悉C++整体框架--2
人麻了,没想到中间隔了这么久。厚着脸皮说是第2天。
学习链接:C入门教程,C基础教程(更新完毕) 在线编程:菜鸟工具或者ideone
DAY 2 理论及操作
类。class为类的关键字,其后为类名称ÿ…
[学习笔记-SLAM篇]KITTI数据集简单记录
参考: kitti数据集使用-rosbag-rviz 这是一个使用实例,大佬出品。
详解KITTI数据集 含有介绍和国内镜像。

4.1ORB-SLAM3之处理缓存队列中的关键帧
0.简介
该函数主要包括以下几个部分:
计算该关键帧特征点的Bow信息更新当前关键帧新增地图点的属性更新共视图中关键帧间的连接关系将该关键帧插入到地图中
1.计算该关键帧特征点的Bow信息ComputeBoW()
vector<cv::Mat> vCurrentDesc Converter::toDescr…
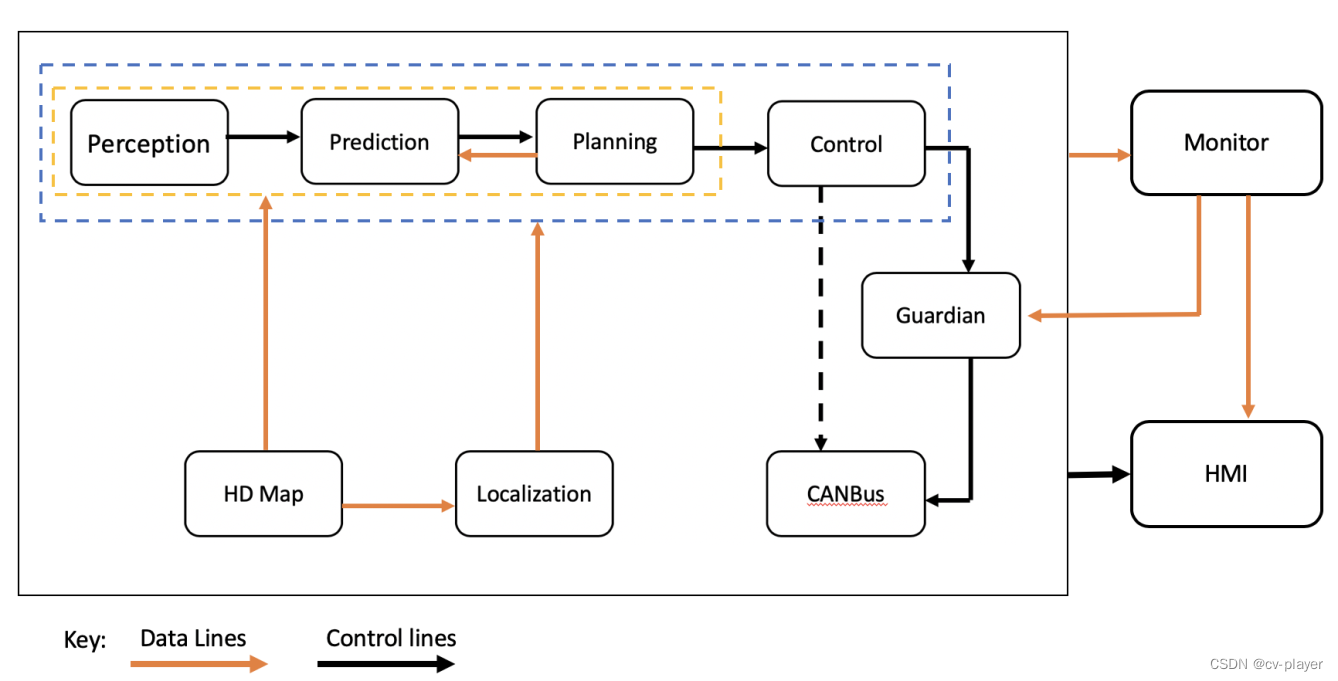
Apollo感知模块
Apollo感知模块之软硬件硬件配置软件设计障碍物检测识别红绿灯检测识别车道线检测硬件配置 Apollo感知模块在硬件层面的配置如下:
Lidar: 128 线 LiDAR velodyne 16 线 LiDAR (lidar_front, lidar_rear_left, lidar_rear_right)Radar: radar…

延迟at及crontab定时命令,清空临时文件垃圾
邮件mail
使用输入重定向 可以管道 系统延时任务及定时任务 #1.系统延时任务#### [rootlocal host ~]# at 23:37 ##设定任务执行时间 at> rm -fr /mnt/* ##任务动作 at> <<CTRLD ##用ctrlD发起任务 [rootlocal host ~]#at now1min ##延迟1分钟 at> rm -fr …
![[BEV系列]BEVFormer: Learning Bird’s-Eye-ViewRepresentation from Multi-Camera Images viaSpatiotemporal](https://img-blog.csdnimg.cn/27da0a0c762c4279ba124084b06e0ec9.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBA5YeM6Z2S5769,size_20,color_FFFFFF,t_70,g_se,x_16#pic_center)
[BEV系列]BEVFormer: Learning Bird’s-Eye-ViewRepresentation from Multi-Camera Images viaSpatiotemporal
论文链接:https://arxiv.org/pdf/2203.17270v1.pdf 代码链接:https://github.com/zhiqi-li/BEVFormer 1. 摘要(Abstract) 3D视觉感知任务,包括基于多摄像头图像的3D检测和地图分割,对于自动驾驶系统至关重要…


HDMapNet: An Online HD Map Construction and Evaluation Framework:将高精地图工作交给感知去做
构建高清地图往往都是公司的高清地图团队的任务,但是需要很大的工作量,并且道路变化会增加标注的工作量,实时的建立高清地图,将任务交给感知,是个很有意义和挑战的事! arxiv地址: https://arxiv.org/pdf/21…

PCDet_Pointpillars调试
PCDet调试实现
在运行pointpillars时,根据github步骤能够在shell以及Pycharm Terminal中运行,在进入pycharm进行调试时报错。
问题一
在GitHub中,生成数据信息时,使用如下命令行
python -m pcdet.datasets.kitti.kitti_datase…

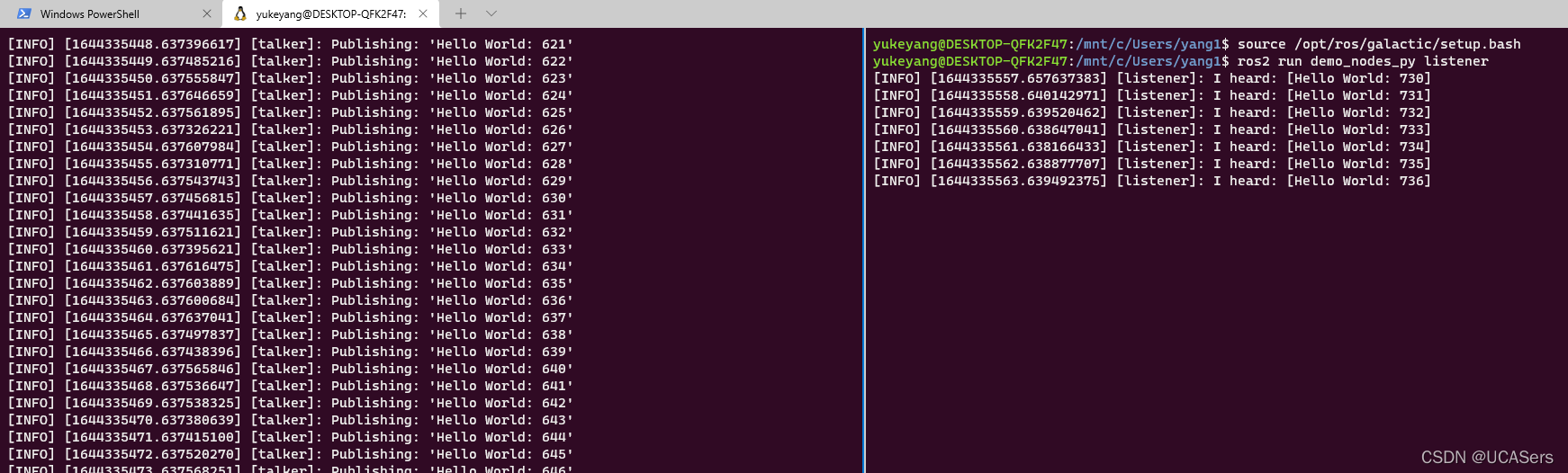
Ubuntu 20.04安装ROS2 Galactic
Ubuntu 20.04安装ROS2 GalacticUbuntu 20.04 apt 更换国内镜像源安装ROS2运行测试用例Ubuntu 20.04 apt 更换国内镜像源
参考此博客"终端操作 - 适用于 Server & Desktop 版本"一节,更换镜像源为国内的清华镜像源。
安装ROS2
参考官网的步骤安装RO…
(02)Cartographer源码无死角解析-(36) PoseExtrapolator→AddImuData()、AddOdometryData()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…

(02)Cartographer源码无死角解析-(30) LocalTrajectoryBuilder2D::AddRangeData()→激光雷达运动畸变较正
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
(02)Cartographer源码无死角解析-(28) GlobalTrajectoryBuilder构建过程与数据转发前后端
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…

经典基于外观的SLAM框架-RTABMAP(RGBD视觉输入方案)
经典基于外观的SLAM框架-RTABMAP 文章目录 经典基于外观的SLAM框架-RTABMAP1. RTABMAP整体框架2.RTABMAP的内存管理机制3. 视觉里程计4. 局部地图5. 回环检测与图优化6. 代码工程实践 1. RTABMAP整体框架 RTABMAP是采用优化算法的方式求解SLAM问题的SLAM框架,本赛题…
【实战项目开发技术分享】perf 和火焰图的安装及使用教程
文章目录 一、介绍1.1 perf和火焰图的概述1.2 perf和火焰图的优势和适用场景二、perf工具2.1 perf工具的安装2.2 perf基本概念和用法2.3 perf使用示例:性能计数和事件采样2.4 perf使用示例:调用图和调用链分析三、火焰图工具3.1 火焰图工具的安装3.2 火焰图基本概念和用法3.3…
(02)Cartographer源码无死角解析-(23) 传感器数据类型自动推断与数据利用率计算
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
自动驾驶成为汽车产业未来趋势,连接器行业迎来进一步发展
连接器的应用范围越来越广泛,从汽车、工业、医疗、消费电子、通信、计算机到航空航天,几乎所有的领域都使用连接器。
以汽车行业为例,一辆燃油汽车通常需要几百到上千个连接器,而电动汽车则需要更多,因为需要连接电池…
ROS系列(二)-常用命令和工具
ROS系列(二)-常用命令和工具一、新建工作空间 1、 创建工作空间,注意安装时创建catkin_ws是安装官方功能包用的,其他可以自己命名,不要与自己包搞混,catkin是ROS编译工具,node是可执行进程&…

SLAM总结(三)-传感器之各传感器特性
SLAM总结(三)-传感器之各传感器特性一、综述二、相机1、单目相机2、深度相机双目相机结构光相机ToF相机三、激光雷达1、2D激光雷达2、3D激光雷达四、IMU六、编码器五、全球导航卫星系统(GNSS)七、其他辅助传感器一、综述
1.传感器可分为主动式和被动式。…

SLAM总结(二)-数学基础之常用概率知识
SLAM总结(二)-数学基础之常用概率知识1.常用概率论基础概念:在高维情况下,即n很大时,由链式法则得到的联合概率p(x1,x2,…,xn)将非常难求解,但是在每个状态只与前一个状态有关的条件独立的假设下࿰…
(02)Cartographer源码无死角解析-(22) 传感器数据分发→CollatedTrajectoryBuilder
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
(02)Cartographer源码无死角解析-(21) MapBuilder→AddTrajectoryBuilder()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…

mmdetection3d nuScenes (持续更新)
Mmdetection3d集成了大量3D深度学习算法,其中很大一部分可以在智能驾驶nuScenes数据集上运行。在算法应用nuScenes数据之前,mmdetection3d提供了相应的预处理程序。关于nuScenes的详细介绍请参考本博客之前的文章nuScenes数据集详细介绍_Coding的叶子的博…

(02)Cartographer源码无死角解析-(02) ROS基础讲解→记录编译过程及常用指令
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 …

(01)ORB-SLAM2源码无死角解析-(65) BA优化(g2o)→闭环线程:Optimizer::OptimizeEssentialGraph→本质图优化
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
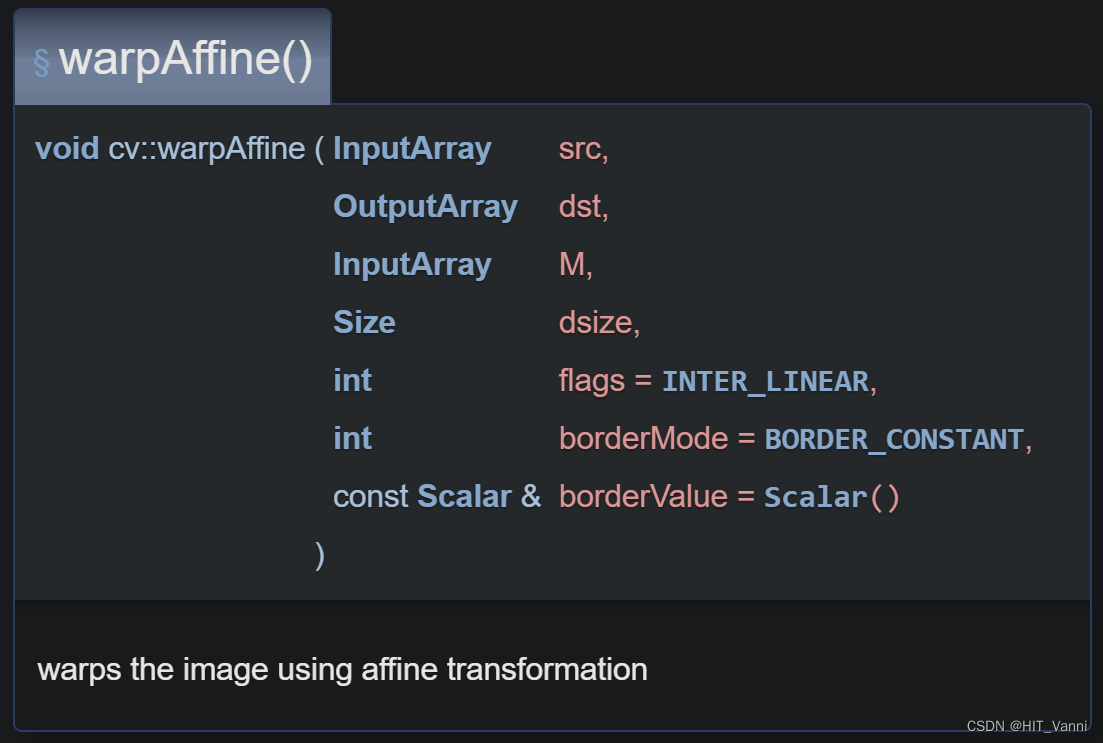
CenterFusion数据处理函数__getitem__()解析
CenterFusion数据处理函数__getitem__解析 1. 图像数据处理1.1 通过利用nuScence_COCO实例化对象获取图像以及相关数据的信息1.2 获取图像数据增强的相关参数:中心点c,尺度scale,旋转rotia和翻转flip1.3 根据生成的参数生成仿射矩阵来对图像进…
![[2022]DyOb-SLAM : Dynamic Object Tracking SLAM System](https://img-blog.csdnimg.cn/ae3bfed4c2e44a9fb412cccb73a81144.png)
[2022]DyOb-SLAM : Dynamic Object Tracking SLAM System
1.作者
Rushmian Annoy Wadud、Wei Sun
2.时间
2022
3.整体架构 DyOb-SLAM是DynaSLAM和VDO-SLAM的结合:
基于先验信息使用Mask RCNN分割出动态目标通过基于光流和场景流的算法对运动目标进行跟踪对静态点进行BA优化
输出:
当前帧显示ORB特征以及Masj信息和对…

ROS:参数管理机制详解
目录 ROS:通信机制一、参数管理机制简介1.1概念1.2作用 二、参数服务器理论模型三、参数操作实现(C)3.1需求3.2参数服务器新增(修改)参数3.3参数服务器获取参数3.4参数服务器删除参数 ROS:通信机制
一、参数管理机制简介
参数服务器在ROS中主要用于实现…
vcs import src < ros2.repos 或 vcs import --input ros2.repos src 下载失败或速度慢
文章目录一、遇到的问题:二、解决办法一、遇到的问题:
Windows10 根据ROS2的官方编译教程步骤下载ROS包时,到vcs import src < ros2.repos 或 vcs import --input ros2.repos src这一步报错或者下载速度极慢
二、解决办法
将ros2.repos…
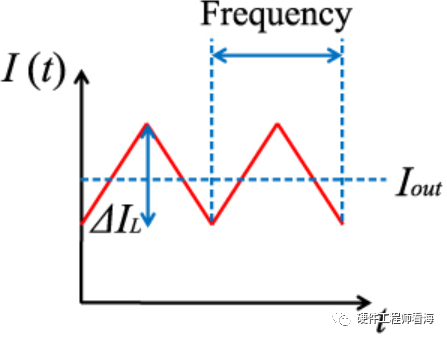
你会选择LDO dropout voltage吗?
原文来自公众号:工程师看海 后台回复:LDO仿真文件 LDO是我们常用的电源解决方案,dropout voltage(压差)是LDO最常见的参数之一,但是并不是所有的工程师都能够正确的设计LDO dropout voltage,导致…
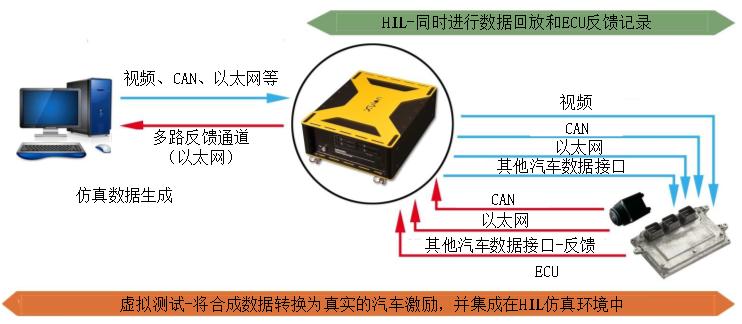
【虹科车辆网络】logiRECORDER-谱写基于视觉的自动驾驶测试新篇章
随着人工智能技术的快速发展,自动驾驶技术也有了质的提升,尤其是基于视觉的自动驾驶技术在自动驾驶的解决方案中得到了广泛的应用,如车道线检测、车辆识别、行人识别等技术已经在自动驾驶领域逐渐普及。诸如特斯拉这种自动驾驶巨头都是极其青…
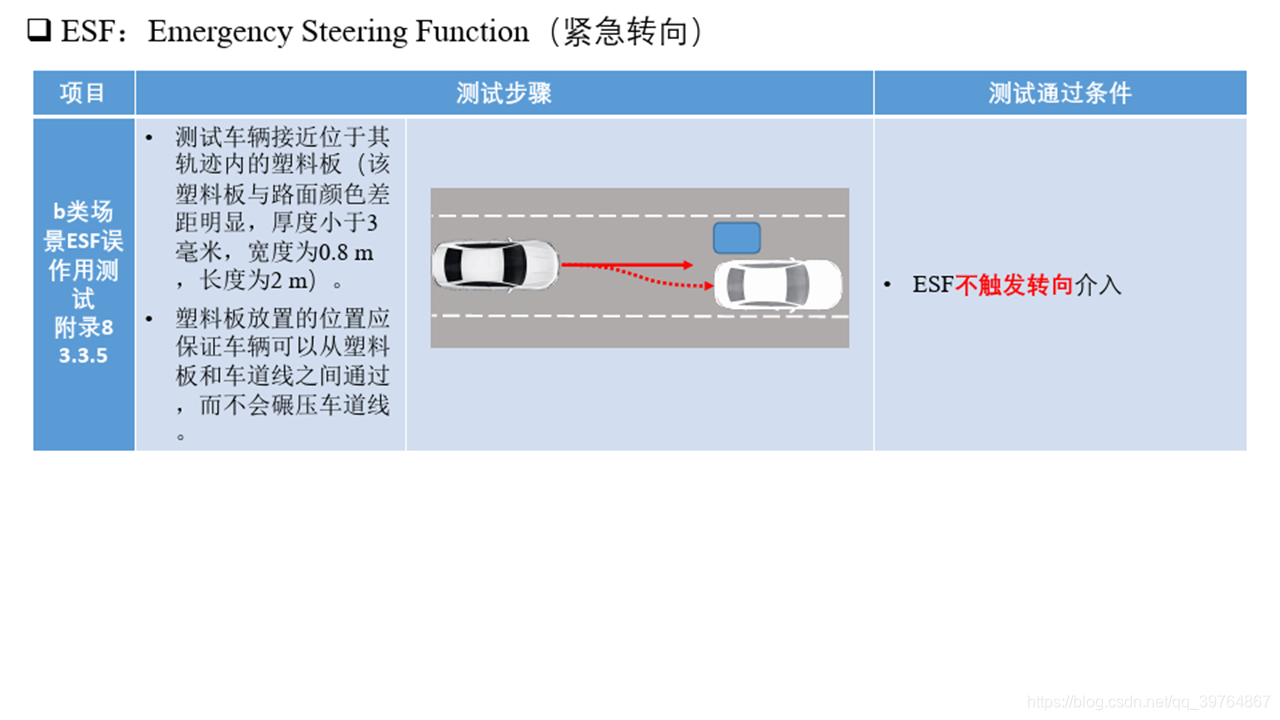
ECE_R79_Steering Systems_法规解读
ECE_R79_Steering Systems_法规解读 目录ECE_R79_Steering Systems_法规解读0. R79 法规简介1. A 型 ACSF Automatically Commanded Steering Function2. B1 型 ACSF Automatically Commanded Steering Function3. C 型 ACSF Automatically Commanded Steering Function4. CSF …

自动驾驶技术:从科幻到现实,揭秘无人驾驶的黑科技
自动驾驶技术:从理论到实践
引言
自动驾驶技术正逐渐改变交通方式和出行体验。它基于计算机视觉、机器学习和传感器融合等技术,使汽车能够在无需人类干预的情况下进行自主驾驶。本篇博客将深入探讨自动驾驶技术的背后原理和实现方法,并提供…
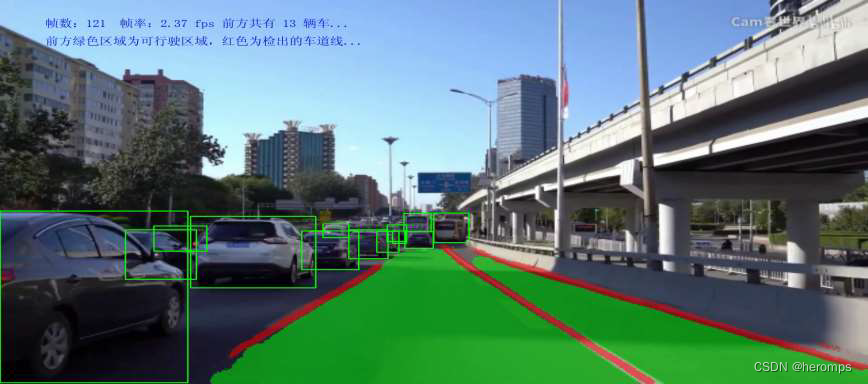
《基于AidLux的自动驾驶智能预警应用方案》
YOLOP模型转ONNX
ONNX是开放式神经网络(Open Neural Network Exchange)的简称,ONNX的规范及代码主要由微软,亚马逊,Facebook和IBM等公司共同开发,以开放源代码的方式托管在Github上。目前官方支持加载ONNX模型的框架有࿱…
【论文解读】重新审视作为广义旅行商问题的 Boustrophedon 覆盖路径规划算法
标题:Revisiting Boustrophedon Coverage Path Planning as a Generalized Traveling Salesman Problem 作者:Rik Bahnemann, Nicholas Lawrance, Jen Jen Chung, Michael Pantic, Roland Siegwart, and Juan Nieto 来源:https://arxiv.org/pdf/1907.09224.pdf 代码:https:…

(02)Cartographer源码无死角解析-(67) 2D后端优化→FastCorrelativeScanMatcher2D -分支定界算法1
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文…
(02)Cartographer源码无死角解析-(69) 2D后端优化→线程池深入追踪、问题、困惑梳理,知识点小结
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文…

IntentNet: Learning to Predict Intention from Raw Sensor Data
动机
In this paper we develop a one-stage detector and forecaster that exploits both 3D point clouds produced by a LiDAR sensor as well as dynamic maps of the environment. we exploit 3D LiDAR point clouds and dynamic HD maps containing semantic elements s…

车道线检测 LaneNet
论文:https://arxiv.org/abs/1802.05591?contextcs 代码:https://github.com/MaybeShewill-CV/lanenet-lane-detection 作者:弓 长 木 公 核心思想: 采用实例分割的方式得到每条车道线的像素点集,通过学习出路面的透视…

2021年9月26日windows 通过vnc-viewer软件连接树莓派并且设置树莓派自启vnc服务,完美实现电脑中操作树莓派!!!
一.笔记本电脑(windows系统)通过vnc服务连接树莓派
1.笔记本中下载vnc-viewer软件,地址为https://www.realvnc.com/en/connect/download/viewer/ 2.下载好后安装vnc-viewer软件,按照下面的指示一步步安装 3.安装好后将已经…

如何利用计算机视觉打造低成本自动驾驶方案
导语:本文内容来自图森互联科技首席科学家王乃岩在雷锋网硬创公开课的分享。编者按:本文内容来自图森互联科技首席科学家王乃岩在雷锋网(公众号:雷锋网)硬创公开课的分享,由雷锋网旗下栏目“新智驾”整理。 本期公开课要点&#x…

ROS系统cpp创建节点node
创建一个workspace
mkdir -p ws/src
workspace中必须先创建src文件夹
编译工作空间
cd ws
catkin_make
source devel/setup.bash
进入工作空间后使用catkin_make 编译
source可以多使用几次。
创建package
cd src
catkin_create_package {pkg_name} rospy roscpp rosms…
proteus仿真出错:VCC and GND nets are connected - check net GND
目录
问题
错误复现
解决办法 问题
当我们在用proteus仿真时,可能会出现以下错误 错误复现 解决办法
供电网配置错误,按以下操作纠正

【OpenCV】第2章 核心操作
目录 2.1 图像基本操作
2.1.1 访问和修改像素值 2.1.2 获取图片属性
2.1.3 图片分割
2.1.4 分割与合并通道
2.1.5 为图像创建边框
2.2 图像的运算
2.2.1 图像的加法
2.2.2 图像混合
2.2.3 图片位运算
2.3 性能测量和改进技术
2.3.1 用OpenCV测量代码性能
2.3.2 Open…

MicroPython的MQTT实现(asyncio协程版)
一、改自:umqtt.simple代码
https://github.com/micropython/micropython-lib/tree/master/umqtt.simple
二、免费MQTT测试服务器
https://www.emqx.cn/mqtt/public-mqtt5-broker https://www.emqx.cn/mqtt/mqtt-websocket-toolkit
三、源代码(lib\umqtt\cw_s…
#每周一篇论文3#[感知] 激光雷达标定
目录激光雷达外参数自标定选取大致地面数据地平面分割计算变换矩阵系统评价参数输出校准效果资源下载激光雷达外参数自标定
基于激光雷达的车载三维重建系统和感知系统工作时需要对激光雷达的外参数(三个旋转参数和三个平移参数)进行标定。 激光雷达的外参数的标定是指求解激光…

(01)ORB-SLAM2源码无死角解析-(48) 不同跟踪方法的对比、梳理完整跟踪流程→Tracking::Track()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(47) 跟踪线程→局部地图跟踪TrackLocalMap():局部地图点过滤
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(17) 单目初始化Initializer→八点发求解Fundamental矩阵
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

史上最简SLAM零基础解读(2) - 对极约束→Essential矩阵、Fundamental矩阵推导
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始 有兴趣的朋友可以加微信 17575010159 相互讨论技术 - 文末公众号也可关注 文末正下方中心提供了本人联系方式,点击本人照片即可显示WX→官方认证{\color{blue}{文末正下方中心}提供了本人 \color{red} 联…
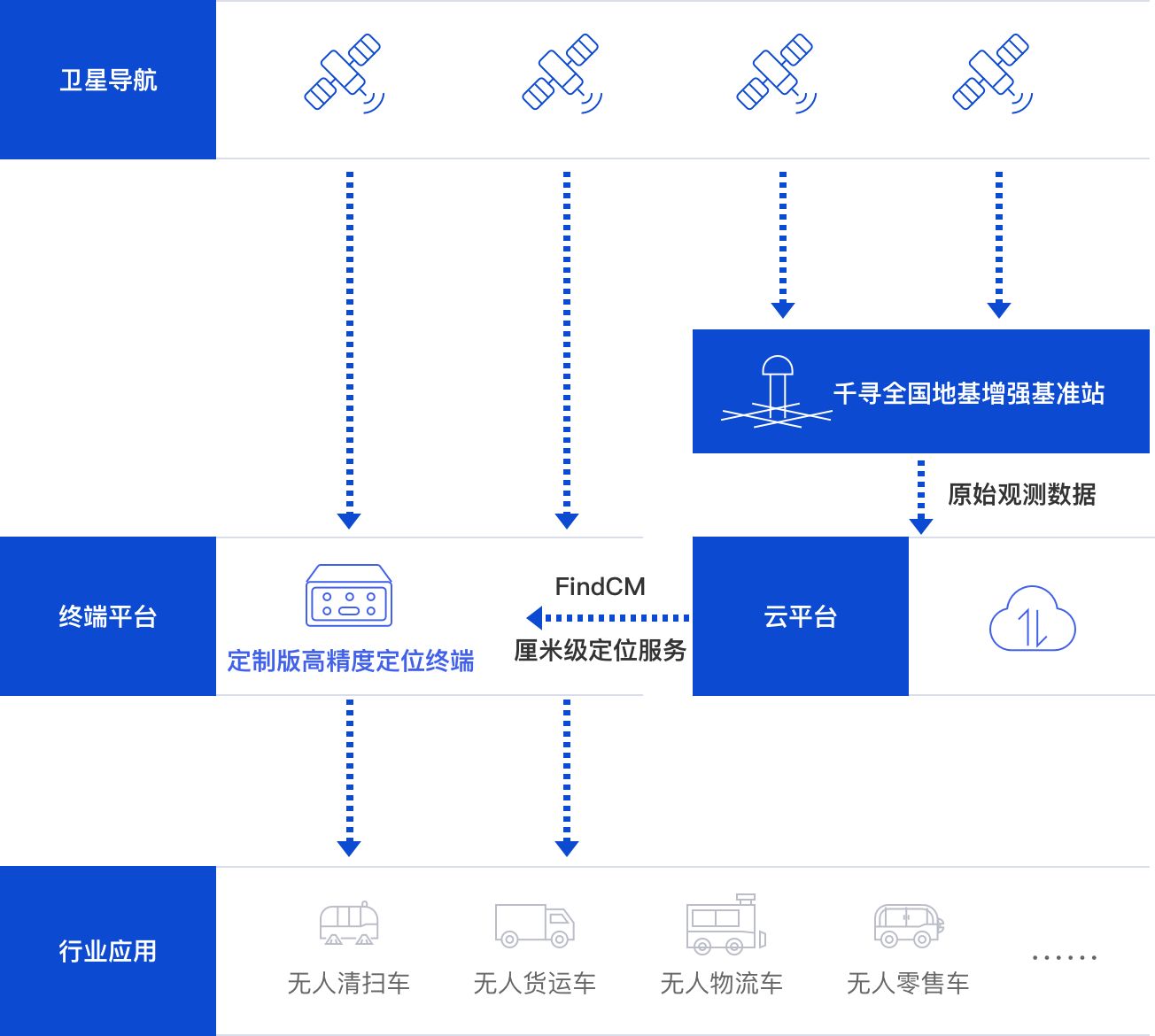
解锁园区交通新模式:园区低速自动驾驶
在当今科技飞速发展的时代,自动驾驶技术成为了备受关注的领域之一。尤其是在园区内部交通管理方面,自动驾驶技术的应用正在日益受到重视。 园区低速自动驾驶的实现需要多个技术领域的协同合作,包括自动驾驶技术、计算机视觉技术、通信技术、物…
自动驾驶——驶向未来的革命性技术
自动驾驶——驶向未来的革命性技术 自动驾驶的组件自动驾驶的优势自动驾驶的应用自动驾驶的未来中国的自动驾驶 自动驾驶是一种技术,它允许车辆在没有人类驾驶员的情况下自主地进行行驶。它利用各种传感器、计算机视觉、人工智能和机器学习算法来感知和理解周围环境…

【Apollo】自动驾驶的平台背景,平台介绍
作者简介: 辭七七,目前大一,正在学习C/C,Java,Python等 作者主页: 七七的个人主页 文章收录专栏: 七七的闲谈 欢迎大家点赞 👍 收藏 ⭐ 加关注哦!💖…
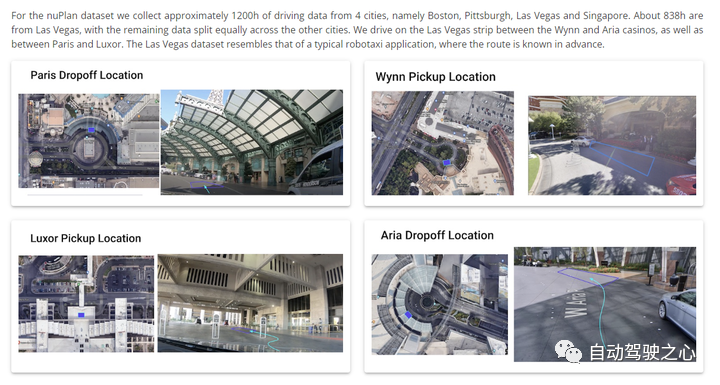
8.11 校招 内推 面经
绿泡泡: neituijunsir 交流裙,内推/实习/校招汇总表格 1、校招丨OPPO 2024届全球校园招聘正式批启动(内推)
校招丨OPPO 2024届全球校园招聘正式批启动(内推) 2、校招总结--自动驾驶轨迹预测岗位面经分享…

后院失火、持续亏损!Mobileye半年报「不回避」竞争压力
"客户在2023年上半年非常谨慎,导致增长率低于正常水平,但我们已经看到下半年回暖趋势,预计下半年交付将比去年同期增长16%,远高于上半年。"这是Mobileye在近日公司半年报发布会上的预判。 公开数据显示,今年…

使用ROS功能包camera_calibration进行单目相机和双目相机的内参和外参标定
1.概述
本文总结使用ROS标定单目和双目相机的过程,同时提供生成棋盘格文件的方法。
参考链接: [1]使用ros标定相机的内参和外参 [2]ROS下采用camera_calibration进行双目相机标定
2.生成棋盘格文件
棋盘格可以自己买一个,或者打印一个粘在…

(01)ORB-SLAM2源码无死角解析-(14) 地图初始化→单目初始化MonocularInitialization():尺度不确定性
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(13)追踪总体框架讲解→Tracking::Track()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

ROS:话题通信机制详解
目录 ROS:通信机制一、话题通信简介二、话题通信实操(C)2.1分析2.2发布方代码2.3订阅方代码2.4配置CMakeLists.txt2.5执行2.6注意 三、话题通信实操(python)3.1分析3.2发布方代码3.3订阅方代码3.4添加可执行权限3.5配置…
ICP + Apriltag 实现机器人自动接驳/充电
感谢Cuma zavcı 提供的ros可用的开源ICP算法
如果感兴趣,可以去Pattern Matching on 2D Lidar Data看一下作者本人的描述
先描述一下大概的使用场景,我做这个是因为公司实际要用到这个模块,所以在主管的指导下看了这个包,然后改…
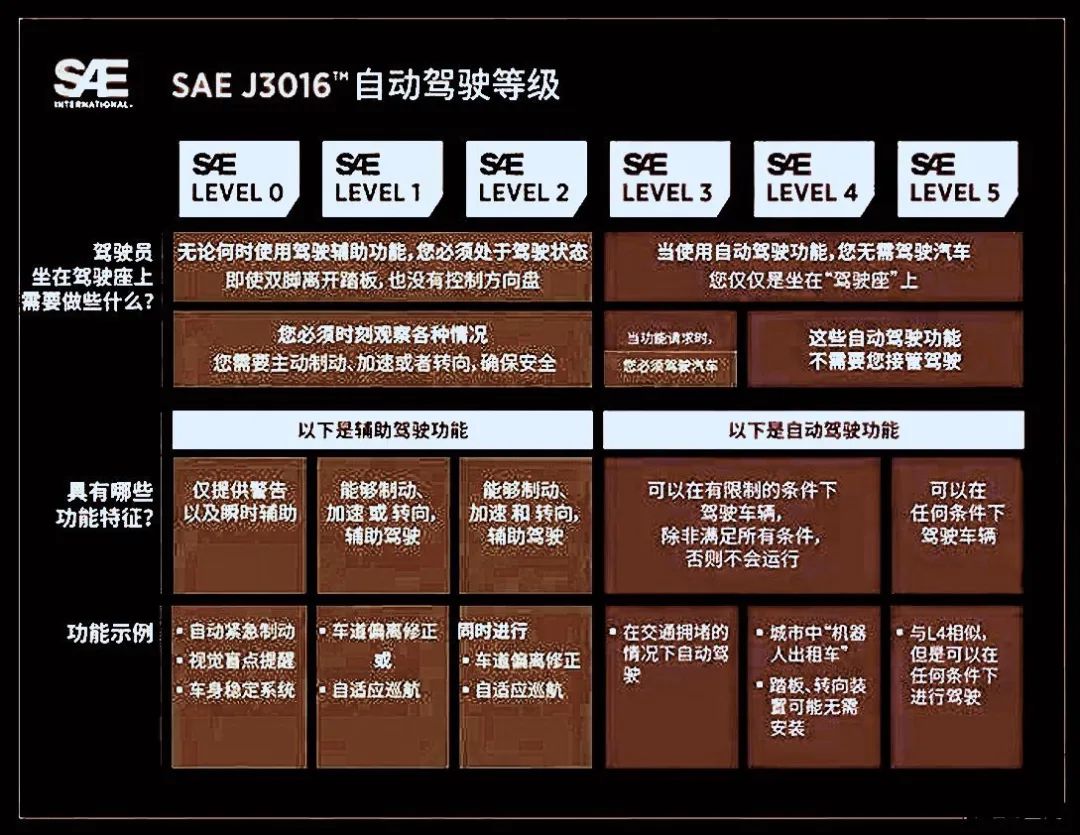
迎来新时代,自动驾驶国标的出台,将带给我们什么变化?
▼
▼
▼ 【科技明说 | 阿明观察】随着《汽车驾驶自动化分级》中国标准出台,业内简称国标,也就是国家推荐标准,即GB/T 40429-2021。这将对我们的日常带来怎样的变化?
看各个媒体公开报道是在2022年3月1日正式实施,目…

(01)ORB-SLAM2源码无死角解析-(12)图像、特征点、关键点去畸变
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
SLAM常见库的源码安装及卸载
SLAM中常见库(持续更新) eigen
eigen的安装分为源码安装和命令行安装
命令行安装
sudo apt-get install libeigen3-dev安装成功之后,在**/usr/include/eigen3/Eigen/src/Core/util/Macros.h** 文件里面可以看到安装的版本,
#define EIGEN WORLD VERSION 3
#define EIGEN MA…
Ubuntu卸载与重装OpenCV
卸载OpenCV
1查看已经安装的版本
pkg-config --modversion opencv2找到opencv源码位置
就是找到之前下载的opencv源码安装包sources,之前进行过cmake编译
打开build文件
// 一顿操作
sudo make uninstall//卸载之前opencv安装的库文件
cd ..//返回上一级
rm -…

rosdep init初始化出错
1.系统环境
Ubuntu16.04 ROS Kinetic 问题截图:
2.常规解决方案
链接: https://blog.csdn.net/luvalluo/article/details/78745677 链接: https://answers.ros.org/question/316260/rosdep-init-cannot-download-default-sources/ 链接: https://blog.csdn.net/…
ROS Kinetic+Ubuntu16.04安装教程
1.材料准备
参考链接
https://www.cnblogs.com/hg-love-dfc/p/10333202.html
http://wiki.ros.org/cn/kinetic/Installation/Ubuntu
https://www.cnblogs.com/hg-love-dfc/p/10333202.html2.卸载
全部卸载
sudo apt-get autoremove --purge ros-*
sudo apt-get remove ros…
第一周(9.8开始,)
\qquad1.车联网是以车内网、车际网和车载移动互联网为基础,按照约定的通信协议和数据交互标准,在车与车(V2V)、车与基础设施(V2I,I指Infrastructure)、车与云(V2C,C指Cloud)实现互联…

便携显示屏以及挂壁电视实现PD充电大概原理
随着USB Type-C接口的普及,越来越多的手机和笔记本电脑都支持通过C接口输出视频。这个小巧而精密的接口,大有把传统的HDMI和DisplayPort接口取而代之的架势。特别是usb4的推出,更是为USB TYPE-C接口一统有线接口形态奠定了基础。 在这样的背景…

虹科自动驾驶 | 飞行时间原理 vs FMCW原理
FMCW被认为是LiDAR规则的改变者——但是这项技术真的有潜力改变这个行业吗?FMCW是否已经可以广泛应用于传感器?为什么大多数激光雷达制造商更愿意继续依赖飞行时间原理?
无论是扫描、旋转还是闪光技术,所有的激光雷达传感器都有一…

DW李宏毅机器学习Task2——Regression
回归的应用: (1)股票市场的预测
(2)自动驾驶车
(3)推荐系统 应用例子:预测进化后的宝可梦CP值
Step 1:Model Linear model:yb∑wixiyb \sum{}^{}w_ix_iyb∑wixi…
自动驾驶 | 仿真测试是自动驾驶落地的必经之路
1 自动驾驶还要走很远的路
2016年,兰德智库指出,一套自动驾驶系统至少需要测试110亿英里,才能达到量产应用条件。
110亿英里是什么概念?可以通过一个直观的例子来解释。地球和太阳的距离是0.932亿英里,一套成熟的自…
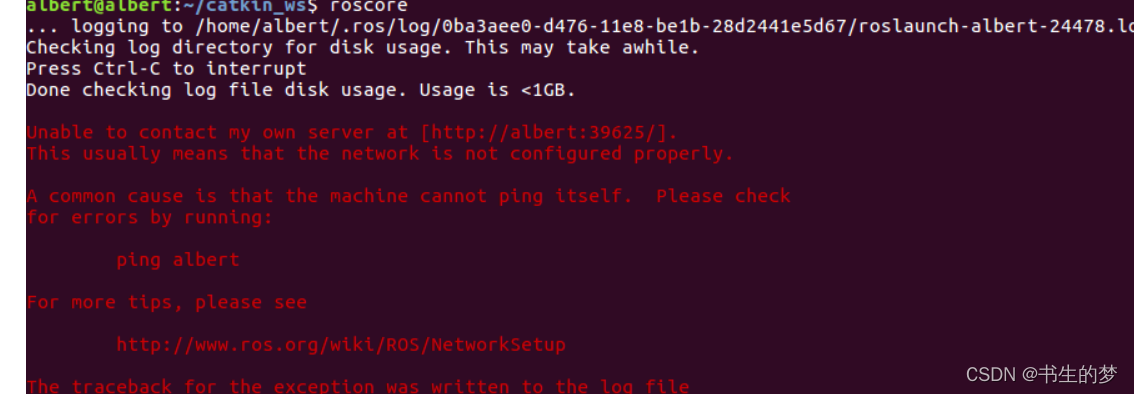
Jeston 与 PX4(一)
Jeston与ROS 大二下半学期开始接触四旋翼无人机,主要在实验室学习飞控,针对bibi飞控的二次开发,与实验室其余成员参加了大大小小的无人机比赛,包括令人崩溃的电赛,虽然没有取得较好的成绩,但却学到了很多。…
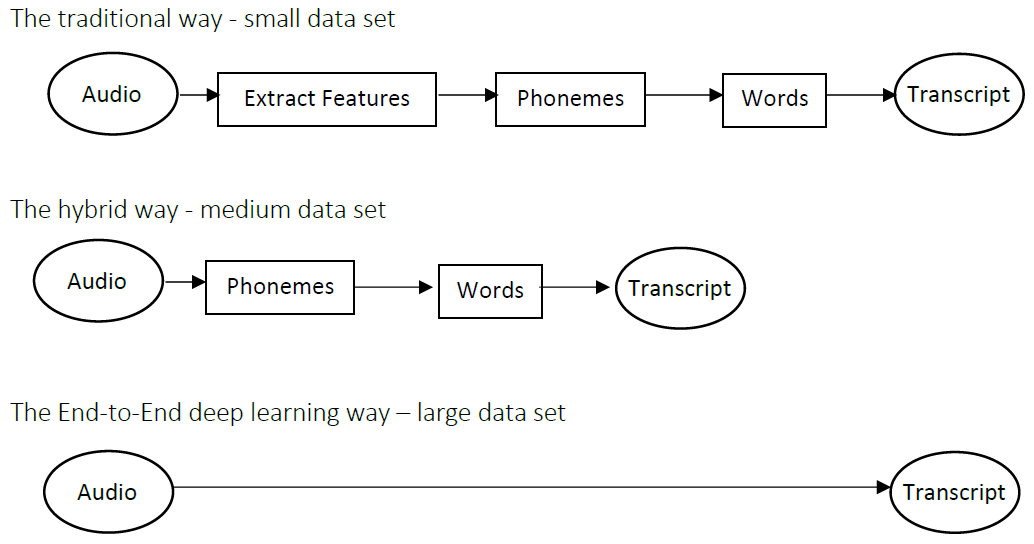
吴恩达 deeplearning.ai - 结构化机器学习项目 - 第2周测验
参考链接: https://blog.csdn.net/u013733326/article/details/80028921 https://zhuanlan.zhihu.com/p/30393923 第2周测验 - 自动驾驶(案例研究)
问题陈述
为了帮助你练习机器学习策略,本周我们将介绍另一种场景并询问你将如何…
ICE-BA代码解析
从main函数开始,读取左右相机,IMU的配置文件,加载左相机和右相机的图像列表,然后进入循环处理依次处理每一帧图像并跟踪特征点,特征点跟踪使用的Brisk库,和通用的跟踪过程相似,我们主要关注特征…
Lyft 发布最大 L5 自动驾驶预测数据集
Lyft 近日发布了一个 Level 5 级别的自动驾驶预测数据集,包含了超过 1000 个小时的驾驶记录。此外,公司还发起自动驾驶运动预测挑战赛,奖金池 3 万美金。
Lyft 又发布了新的数据集。
去年 7 月,Lyft 发布了 L5 级别自动驾驶感知…

zabbix监控项配置
zabbix监控项配置(监控项配置、触发器配置、媒介类型、用户媒介、动作),邮箱警告
监控项配置 触发器配置 添加用户
[rootlocalhost ~]# useradd xiongke
[rootlocalhost ~]# 媒介类型 用户媒介 动作 邮箱警告
添加监控项 添加触发器 添…

蘑菇车联用城市级落地讲述自动驾驶新故事
作者 | 魏启扬
来源 | 洞见新研社 “如果不能实现自动驾驶,特斯拉将一文不值”。
这是马斯克在接受媒体采访时的公开发言,这句话的语境是,特斯拉是自动驾驶坚实的拥护者,且一直在付诸行动。
可是特斯拉渐进式的单车智能路线&am…
获40余家主机厂青睐,这家OTA「吸金王」完成超亿元B2轮融资!
继今年4月获得上汽集团旗下尚颀资本及其合作方山高投控的投资后,近日上海艾拉比智能科技有限公司(以下简称“艾拉比”)正式完成总额过亿元的B2轮融资,新的投资方为聚卓资本、老股东国科新能继续增持,势能资本持续担任独…

无人驾驶实战-第十二课(强化学习自动驾驶系统)(完)
在七月算法上报了《无人驾驶实战》课程,老师讲的真好。好记性不如烂笔头,记录一下学习内容。 课程入口,感兴趣的也可以跟着学一下。 ————————————————————————————————————————— 强化学习ÿ…
Prescan C++仿真代码自动生成
欢迎使用 PrescanSimCppGenerator 1.0 代码仓库 文章目录 项目简介版本说明项目申明技术支持使用指南软件要求变量设置WindowsUbuntu 代码删减prescan_python_dmapi.pysensors and generators 使用步骤WindowsUbuntu 代码详解进阶应用SimCppBridge使用指南软件环境 Windows(Sim…

路径规划-bug算法
Bug1算法
如图2.1所示,起始点和目标点分别为qstart 和qgoal. 初始时刻 i 0,令qL0 qstart ,并称连接qLi 和 qgoal的线段为m-line. 没有遇到障碍时,机器人沿着m-line朝目标qgoal直线移动. 如果遇到障碍,则称点qH1为第…

全文翻译【Scaled-YOLOv4: Scaling Cross Stage Partial Netw】
目录
Abstract
1. Introduction
2、Related work
2.1 Real-time object detection
2.2.Model scaling
3、Principles of model scaling
3.1 General principle of model scaling
3.2.Scaling Tiny Models for Low-End Devices
4 Scaled –YOLOv4
4.1 CSP格式的YOLOv4…
ROS入门-使用常用的ROS命令行工具:操作节点、话题、服务、消息和参数
目录 使用常用的ROS命令行工具:操作节点、话题、服务、消息和参数
1. rosnode:操作节点
2. rostopic:操作话题
3. rosservice:操作服务
4. rosmsg:操作msg消息
5. rossrv:操作srv消息
6. rosparam&am…

SLAM总结(一)- SLAM原理概述与简介
SLAM总结(一)- SLAM原理概述与简介SLAM(Simultaneous Localization and Mapping):同时定位和建图,定位是定位机体在世界坐标系下的位姿(pose、transformation)。单传感器机体一般指相…

ScanNetV2 数据集讲解和选择性下载
写在前面的话:
不可转载!!!!!!!!!!!!
ScanNetV2一共1.2T,数据太大本文会简单讲解如何下载自己想要的文件,并附上修改后的下载程序
ScanNetV2:http://www.scan-net.org/
简介
ScanNetV2的作者是斯坦福大学的博士,其团队通过收集RGB-D的视频序列,通过ipa…

mmdetection3d kitti (持续更新)
Mmdetection3d集成了大量3D深度学习算法,其中很大一部分可以在智能驾驶KITTI数据集上运行。在算法应用KITTI数据之前,mmdetection3d提供了相应的预处理程序。关于kitti的详细介绍请参考本博客之前的文章,例如:【Mini KITTI】KITTI…
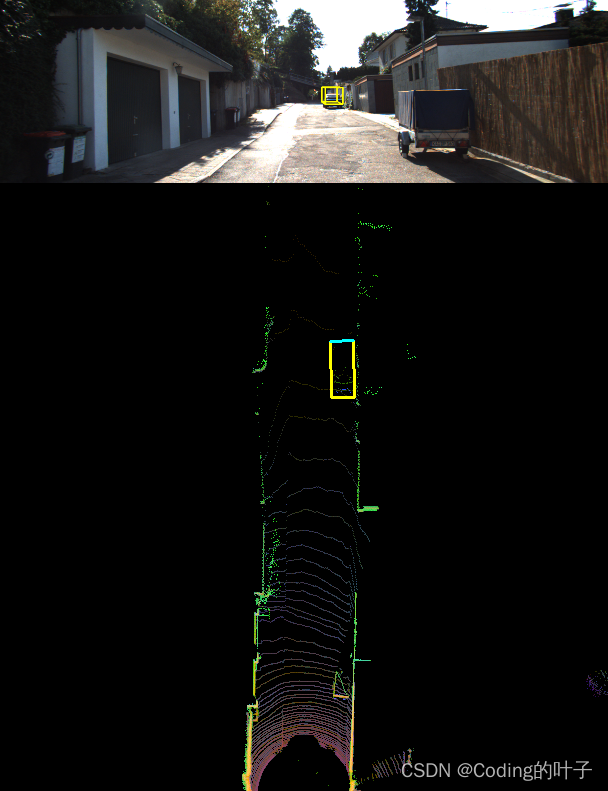
【三维目标检测】Complex-Yolov4详解(一): 数据处理
前面分别介绍了基于点云的三维深度学习算法PointNet、PointNet,和基于体素的三维深度学习算法VoxelNet。本节将开始介绍基于投影的三维深度学习算法Complex-Yolov4。三维投影算法主要思想是用激光雷达点云的鸟瞰图(BEV)和前视图(F…

文章翻译——矩阵微积分
文章作者:Sourya Dey 发表时间: 01 April 2019. 原文:https://www.researchgate.net/publication/332131671_Matrix_Calculus
目录: 文章目录1. 符号2. 基本规则3. 导数类型3.1 标量对标量(求导)3.2 标量对…
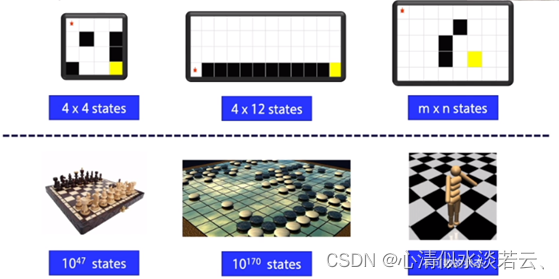
AI Deep Reinforcement Learning Autonomous Driving(深度强化学习自动驾驶)
AI Deep Reinforcement Learning Autonomous Driving(深度强化学习自动驾驶) 背景介绍研究背景研究目的及意义项目设计内容算法介绍马尔可夫链及马尔可夫决策过程强化学习神经网络 仿真平台OpenAI gymTorcs配置GTA5 参数选择行动空间奖励函数 环境及软件…

PV-RCNN: Point-Voxel Feature Set Abstraction for 3D Object Detection
1. Motivation
现在存在的3D目标检测方法可以分为两种,一种是基于point-based,一种是基于grid-based(也就是voxel-based)。point-based可以获得更大的感受野,但是计算成本过高;voxel-based计算效率高,但是信息的损失较大。 因此本论文提出一…

领克08,开创「芯」时代
中国汽车产业(自主品牌)的持续向上,正带动本土智能化核心供应链,尤其是关键算力芯片(SoC)的本土创新。 高工智能汽车研究院监测数据显示,今年1-6月中国市场(不含进出口)自…
【Apollo】推动创新:探索阿波罗自动驾驶的进步(含安装 Apollo的详细教程)
前言 Apollo (阿波罗)是一个开放的、完整的、安全的平台,将帮助汽车行业及自动驾驶领域的合作伙伴结合车辆和硬件系统,快速搭建一套属于自己的自动驾驶系统。 开放能力、共享资源、加速创新、持续共赢是 Apollo 开放平台的口号。百度把自己所拥有的强大、…
8.16校招 内推 面经
绿泡泡: neituijunsir 交流裙,内推/实习/校招汇总表格 1、校招 | 蔚来2024届校园招聘开启(内推)
校招 | 蔚来2024届校园招聘开启(内推) 2、校招 | 吉利控股集团2024届全球校园招聘极氪专场正式启动&…
【Apollo】赋能移动性:阿波罗自动驾驶系统的影响
前言 Apollo (阿波罗)是一个开放的、完整的、安全的平台,将帮助汽车行业及自动驾驶领域的合作伙伴结合车辆和硬件系统,快速搭建一套属于自己的自动驾驶系统。 开放能力、共享资源、加速创新、持续共赢是 Apollo 开放平台的口号。百度把自己所拥有的强大、…

【Apollo】Apollo 8.0系统下载指南
作者简介: 辭七七,目前大一,正在学习C/C,Java,Python等 作者主页: 七七的个人主页 文章收录专栏: 七七的闲谈 欢迎大家点赞 👍 收藏 ⭐ 加关注哦!💖…
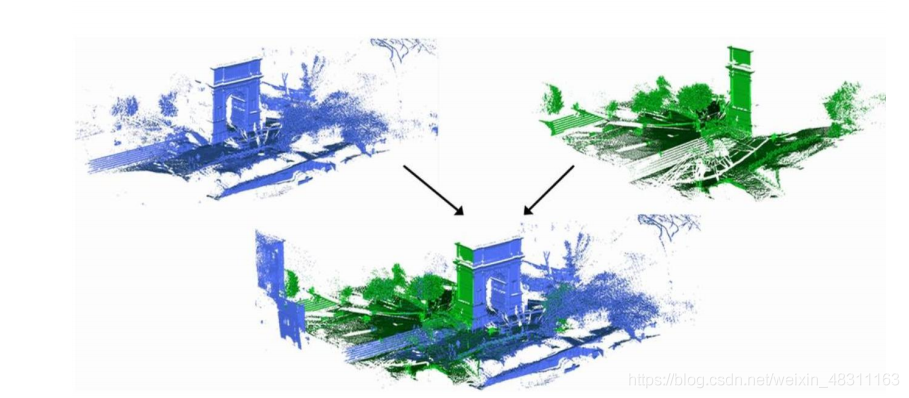
3D点云系列(一)点云介绍
点云数据简介
点云数据(point cloud data)是指在一个三维坐标系统中的一组向量的集合。扫描资料以点的形式记录,每一个点包含有三维坐标,有些可能含有颜色信息(RGB)或反射强度信息(Intensity&a…
PCWindows不能接收到PCUbuntu的Msg该怎么办?
Simulink中的ROS模块Subscribe订阅ROS中发布的message,有时候会发现Subscribe的订阅为空,但是ROS中的Publisher又是在发布数据的,该怎么办?
重启!两个电脑重启
重启大法真好,wireshark我都搞了࿰…
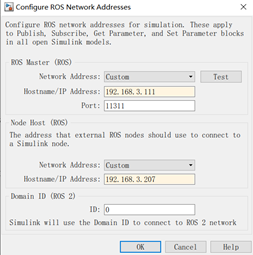
PreScan-Simulink-ROS通信设置笔记
基础准备
两台电脑:PCWindows PCUnbuntu 用局部路由器连线两个电脑,两个电脑在Windows系统环境下连网 第一步 PCWindows PCUbuntu
PCWindows PCUbuntu 均为windows系统
关闭两个电脑防火墙 电脑>>属性>>大图标查看>>防火墙管理常看…

虹科云课堂 | 干货不断!汽车专题直播月本周课程预告
转眼间,虹科云课堂第四期——汽车专题直播月已经开播一周了。 上一周我们的课程有:1.浅谈CAN总线的最新发展:CAN FD向左,CAN XL向右;2.以ansible为中心的自动化运维;3.LGSVL Simulator: 一个高保真的自动驾…
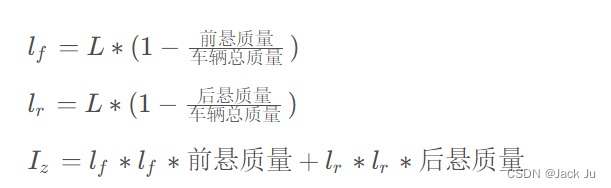
自动驾驶——车辆动力学模型
/*lat_controller.cpp*/
namespace apollo {
namespace control {using apollo::common::ErrorCode;//故障码
using apollo::common::Status;//状态码
using apollo::common::TrajectoryPoint;//轨迹点
using apollo::common::VehicleStateProvider;//车辆状态信息
using Matri…
应用纯跟踪算法(pure pursuit)跟踪运动轨迹
目录
一、主要代码
二、launch文件
三、ctrlC无法终止终端到命令行 一、主要代码
主要代码参考以下博客:
【运动规划算法项目实战】如何使用Pure Pursuit算法进行路径跟踪(附ROS C代码) 算法封装为class PurePursuit,还需要…

借助引导式策略搜索GPS
一、说明 借助引导式策略搜索GPS,机器人可以在20分钟内学习视频中的每项技能。如果通过策略梯度方法进行训练,则需要数周时间。该演示还表明,机器人可以处理以前未经过训练的场景。 在 RL 中,成功是通过解决方案的稳健性及其泛化程…
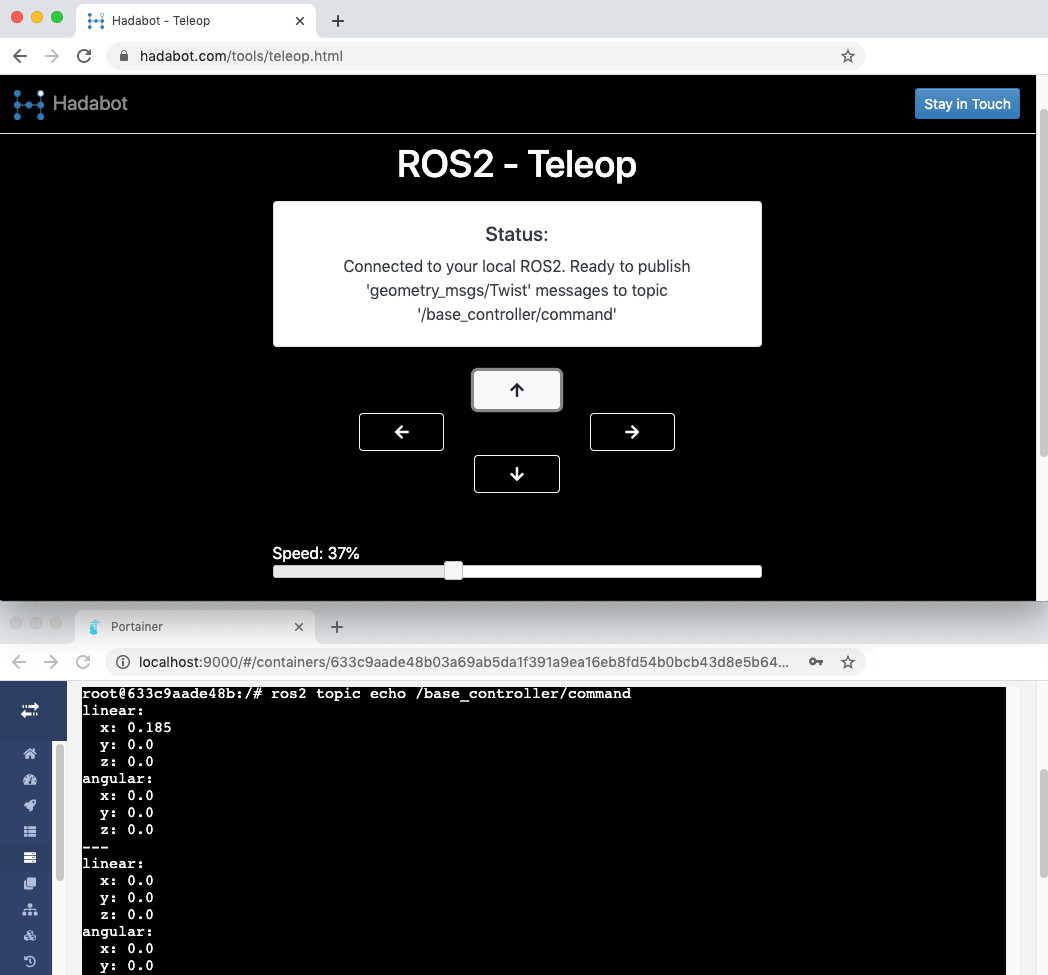
Hadabot:从网络浏览器操作 ROS2 远程控制器
一、说明 Hadabot Hadabot是一个学习ROS2和机器人技术的机器人套件。使用 Hadabot,您将能够以最小的挫败感和恐吓来构建和编程物理 ROS2 机器人。Hadabot套件目前正在开发中。它将仅针对ROS2功能,并强调基于Web的用户界面。 随着开发的进展&a…

智能电动汽车时代开启,漫谈车载算力发展
目录
引言
算力和芯片的关系
车载芯片有哪些
自动驾驶芯片和传统汽车芯片区别
为什么自动驾驶芯片需要这么高的算力
自动驾驶芯片发展现状
车载算力未来:算力是自动驾驶的前提 引言
无论是从2020年开始持续到今天的汽车缺芯问题,还是特斯拉在目…
ros melodic Ubuntu18.04下rosdep init和rosdep update因为网络原因连接guthub失败解决方法
ros melodic Ubuntu18.04下rosdep init和rosdep update因为网络原因连接guthub失败解决方法
如果因为网络原因连接,可以使用阿里云作为跳转代理, ss和proxychains4安装和配置 安装ss和配置服务端 sudo apt install shadowsocks ssserver -p 1234 -k Hua…
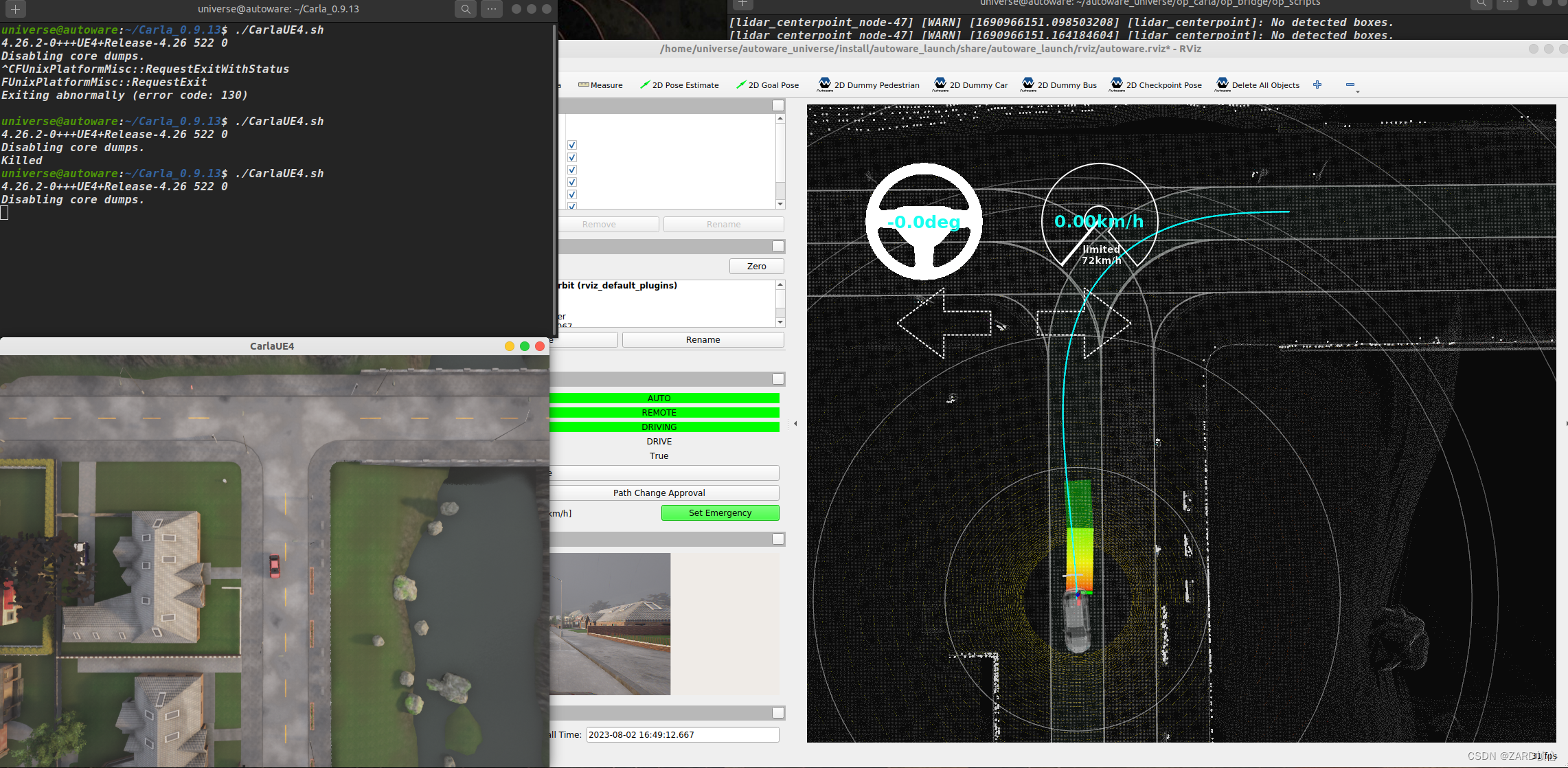
Autoware.universe与Carla(二进制版)联调
文章目录 一、Carla的使用1.1 二进制Carla的安装1.2 Carla API的使用1.2.1 增加行人流和车流1.2.3 改变服务器的时间,光照,天气1.2.3 手动控制车辆1.1.4 车辆的自动驾驶 二、Universe与Carla联调2.1 设置OpenPlanner2.2 重新编译并运行 本文介绍了 Autow…
木叶飞舞之【机器人ROS2】篇章_第二节、turtlebot3安装
没有真实小车的情况下,利用gazebo的仿真,操作小乌龟来学习ros2。废话不多说,直接上命令。
Install Gazebo
sudo apt install ros-humble-gazebo-*Install Cartographer
假如前一节未安装源码版本的cartographer,那就安装apt版本…
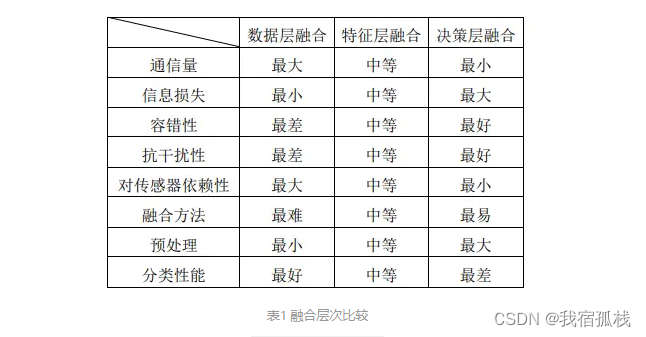
百度Apollo:自动驾驶技术的未来应用之路
文章目录 前言一、城市交通二、出行体验三、环境保护四、未来前景总结 前言
随着科技的不断进步,自动驾驶技术正逐渐成为现实,颠覆着我们的出行方式。作为中国领先的自动驾驶平台,百度Apollo以其卓越的技术和开放的合作精神,正在…
跑ORB-SLAM2踩的坑
Pangolin 和 Eigen的神坑
这两个库时真的烦人,为了跑个代码,系统我重装了两次…
ubuntu 18.04apt-get更新了后,apt-get装的cmake,g,gcc,还有sudo apt-get install libeigen3-dev下载的eigen版本就足够了,不需要去它官网里下载编译…
Pango…
8.25 校招 内推 面经
绿泡泡: neituijunsir 交流裙,内推/实习/校招汇总表格 1、校招&实习 丨驭势科技 校招&实习 全面开启(内推)
校招&实习 丨驭势科技 校招&实习 全面开启(内推) 2、2023校招总结--自动驾驶…
TensorRT_mnist_int8校正
定义网络
为INT8执行定义网络与为任何其他精度定义网络完全相同。权重作为FP32导入,构建者将校准网络,以找到适当的量化因子,从而将网络降低到INT8精度。此示例使用NvCaffeParser导入网络: const nvcaffeparser1;:IBlobNameToTen…

计算机视觉基础-彩色空间互转
一、简介
图像彩色空间互转在图像处理中应用非常广泛,而且很多算法只对灰度图有效;另外,相比RGB,其他颜色空间(比如HSV、HSI)更具可分离性和可操作性,所以很多图像算法需要将图像从RGB转为其他颜色空间,所…
自动驾驶——最优控制算法(LQR)工程化总结
1. Summary
时隔一年,从写下第一篇博文自动驾驶-LQR工程实现(调研),到近段时间,真正在我们的控制器上运行最优控制算法(LQR),一步一个脚印,从开始只是知道其“控制理论”…
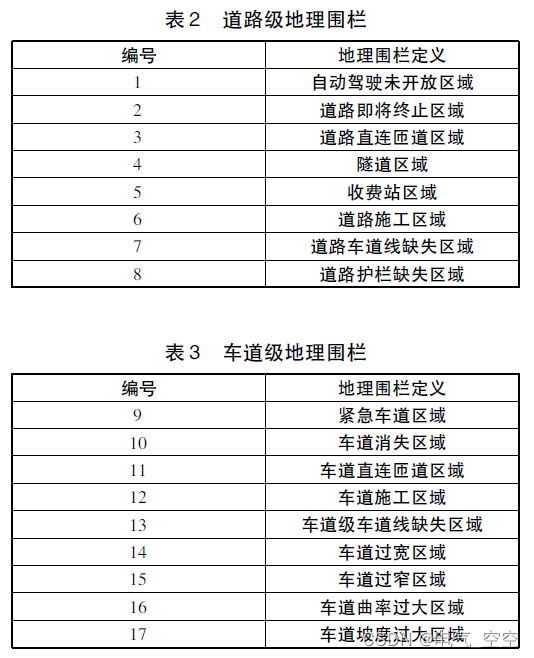
高精度地图定位在高速公路自动驾驶系统中的应用
近年来随着汽车保有量不断增加,随之而来的是: ( 1) 严重的交通拥堵,通行效率低下,用在通行上的时间不断增加; ( 2) 交通事故频发,交通事故导致的伤亡人数和费用不断增加,而且绝大多数事故是由人为因素导致的; ( 3) 大气…

【内推码:NTAMW6c】 MAXIEYE智驾科技2024校招启动啦
MAXIEYE智驾科技2024校招启动啦【内推码:NTAMW6c】
【招聘岗位超多!!公司食堂好吃!!】
算法类:感知算法工程师、SLAM算法工程师、规划控制算法工程师、目标及控制算法工程师、后处理算法工程师
软件类&a…
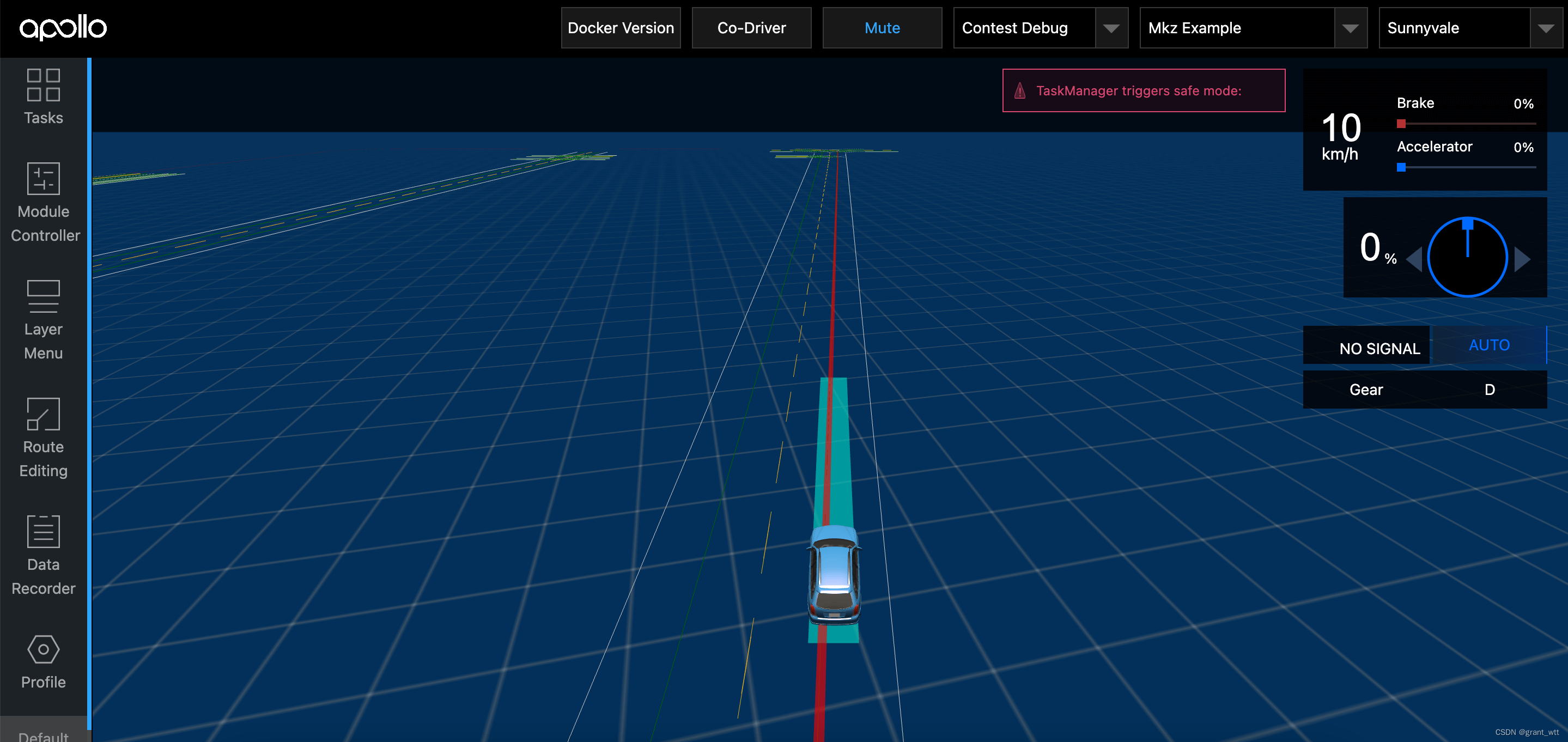
Apollo定速巡航场景仿真调试实验
Apollo定速巡航实验 1.实验环境2 调整速度 1.实验环境
并启动仿真换进 启动命令: bash scripts/bootstrap_neo.sh 点这里进入 选择如下
2 调整速度
记得先选好文件夹
修改保存后记得重启planing模块,就是点关闭一下,再点开就行了
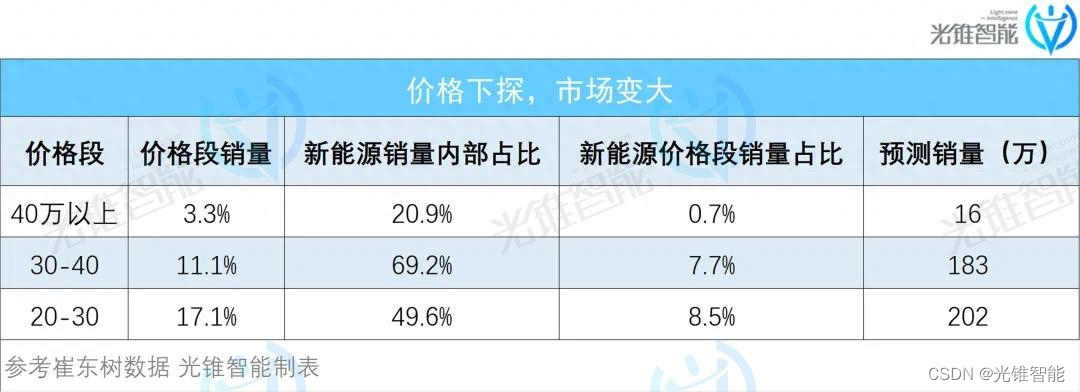
自动驾驶攻城战,华为小鹏先亮剑
点击关注 文|刘俊宏
编|苏扬、王一粟
本文为光锥智能x腾讯科技联合出品
2023年过半,城市NOA(城市领航辅助驾驶)的元年如预期中到来了吗?
8月25日,成都车展开幕,与4个月之前的上海…
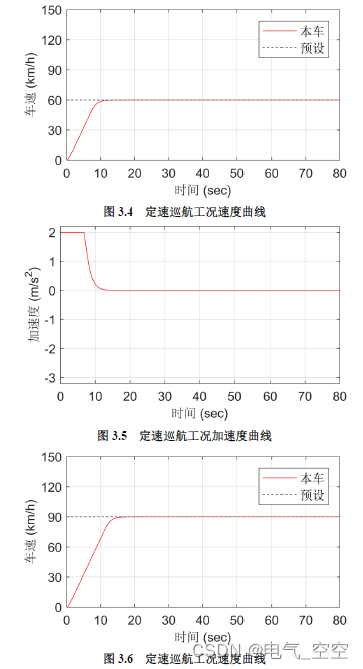
汽车自适应巡航系统控制策略研究
目 录 第一章 绪论 .............................................................................................................................. 1 1.1 研究背景及意义 ..........................................................................................…
【Apollo学习笔记】——规划模块TASK之SPEED_BOUNDS_PRIORI_DECIDER
文章目录 前言SPEED_BOUNDS_PRIORI_DECIDER功能简介SPEED_BOUNDS_PRIORI_DECIDER相关配置SPEED_BOUNDS_PRIORI_DECIDER流程将障碍物映射到ST图中ComputeSTBoundary(PathDecision* path_decision)ComputeSTBoundary(Obstacle* obstacle)GetOverlapBoundaryPointsComputeSTBounda…
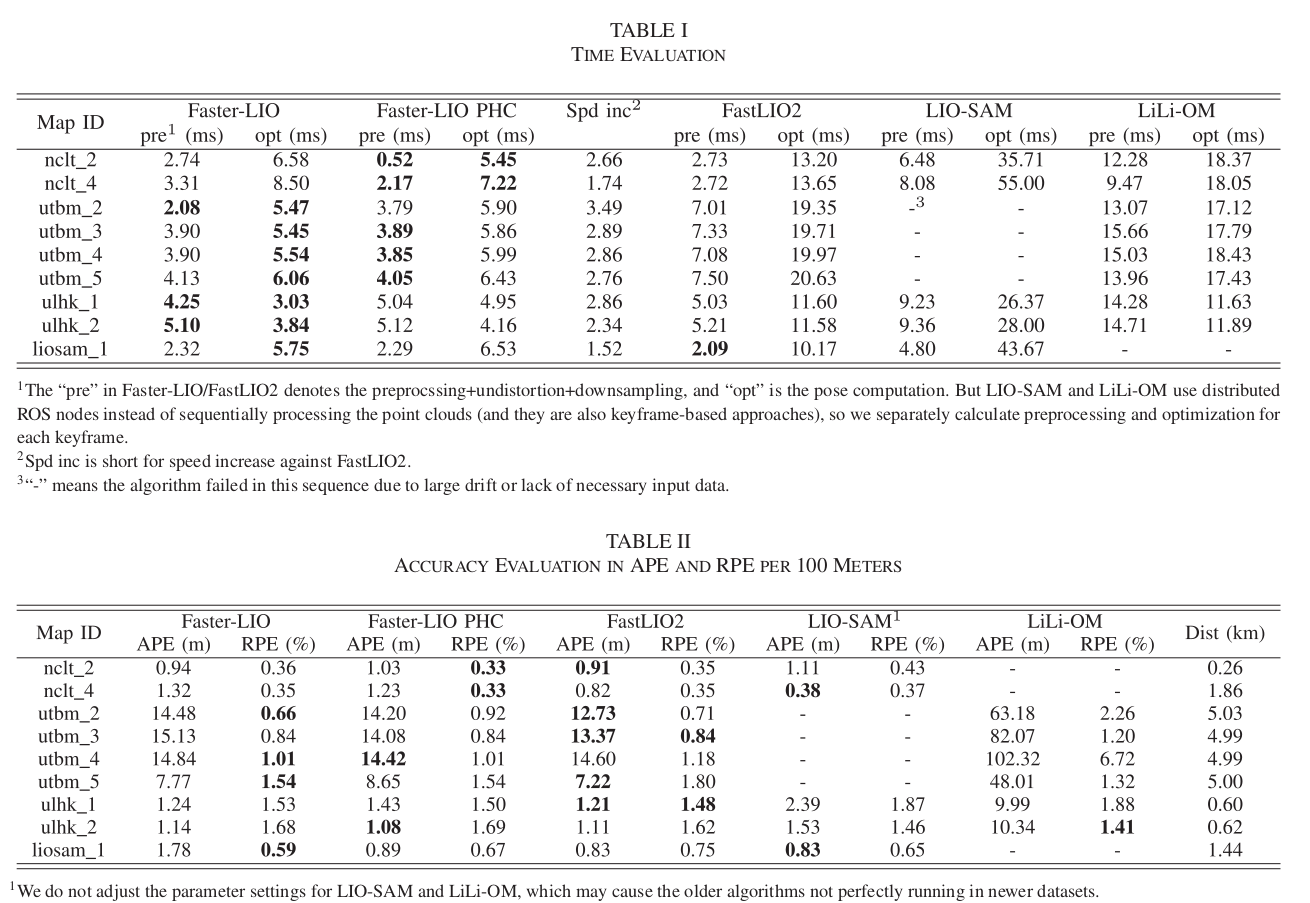
视觉SLAM与激光SLAM简单对比分析
总述
本文旨在梳理目前较为前沿的SLAM技术,包括激光和视觉,主要从精度和实时性两个方面对算法进系评价。
对于激光SLAM了解不深,后期需要补充相关算法的核心思想与算法框架。有问题请大佬们随时留言,我再改正。
0.1 视觉SLAM算…
8.30 校招 内推 面经
绿泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、校招 | 黑芝麻智能2024届校园招聘启动(内推)
校招 | 黑芝麻智能2024届校园招聘启动(内推) 2、校招 | 网易互联网2024校园招聘正式启动&#…
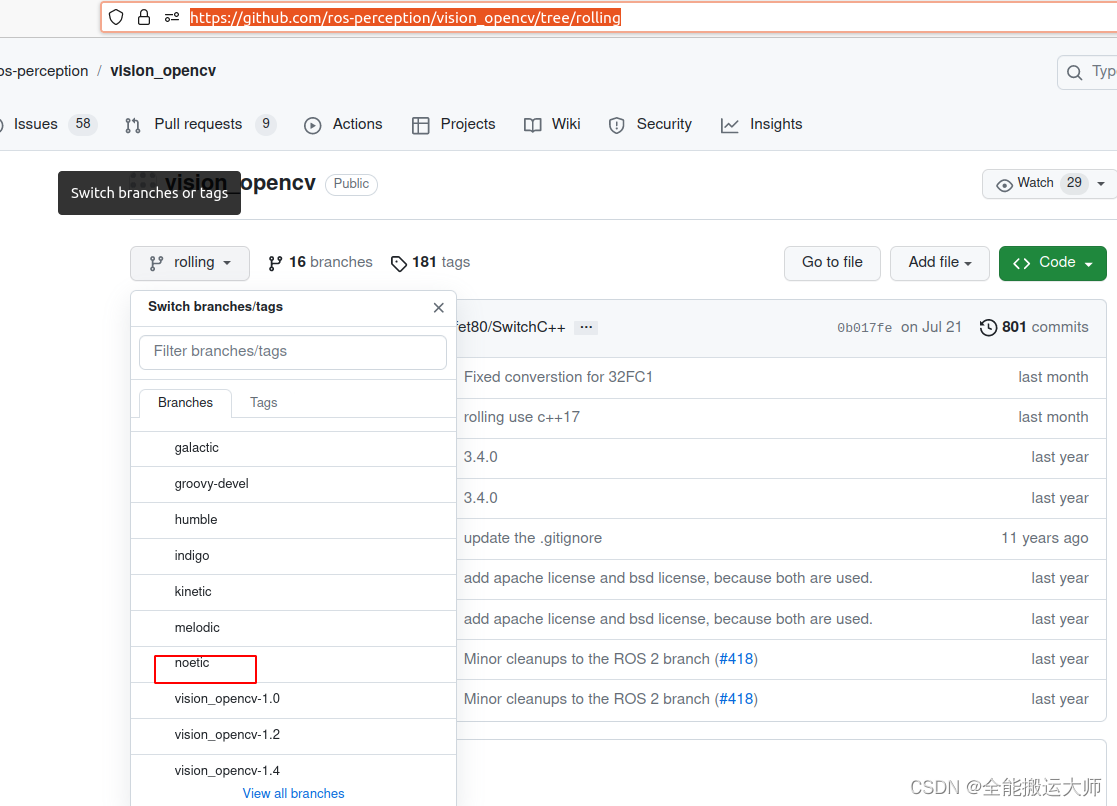
源码安装cv_bridge
1. 下载源码
1去github上下载GitHub - ros-perception/vision_opencv,进去后注意选择与自己的ros对应的版本:(我的为noetic) 如果你直接使用
git clone https://github.com/ros-perception/vision_opencv.git
来拉取的话cmake的…
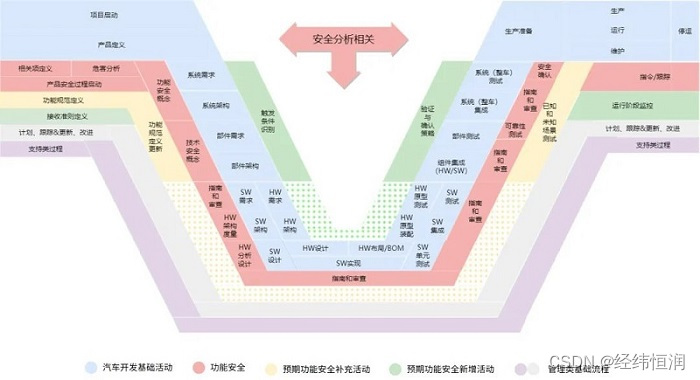
经纬恒润预期功能安全(SOTIF)解决方案为自动驾驶安全保驾护航
近年来,“安全”被普遍认为是智能驾驶汽车被用户接受或者得到商业应用最大的问题,ISO26262功能安全旨在避免由E/E系统功能失效导致的不可接受的风险,主要是针对系统性失效/随机硬件失效导致的风险进行分析和控制,然而传感器和感知…
【Apollo】开启Apollo之旅:让自动驾驶如此简单
前言
Apollo 是百度公司推出的自动驾驶平台。它是一个综合性的自动驾驶解决方案,提供了包括感知、决策、规划和控制等核心功能,以及地图、定位、仿真、数据管理等配套工具。 文章目录 前言Apollo 的发展历程Apollo 8.0新特性软件包管理感知框架工具链小…
自动驾驶数据回传需求
1、需求分析 用户 用户需求 实时性要求 需回传数据 数据类型 采样周期 数据量 大小 数据回传通道 研发工程师 分析评估系统性能表现,例如智驾里程统计、接管率表现、油耗表现、AEB报警次数等 当天 车身底盘数据、自动驾驶系统状态数据等 结构化数据 10…
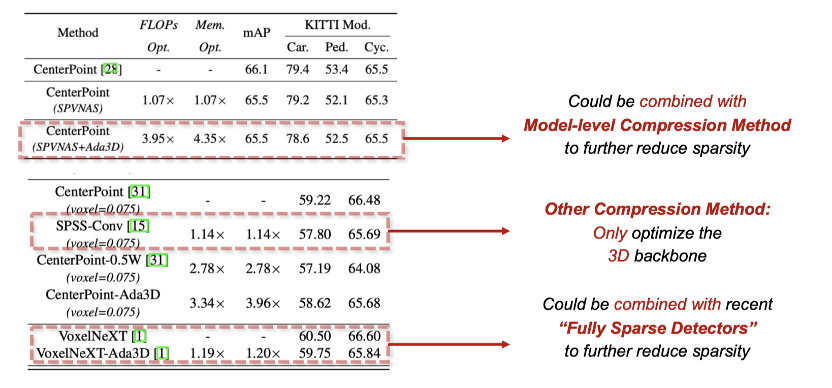
ICCV23 | Ada3D:利用动态推理挖掘3D感知任务中数据冗余性
论文地址:https://arxiv.org/abs/2307.08209 项目主页:https://a-suozhang.xyz/ada3d.github.io/ 01. 背景与动因
3D检测(3D Detection)任务是自动驾驶任务中的重要任务。由于自动驾驶任务的安全性至关重要(safety-critic),对感知算法的延…
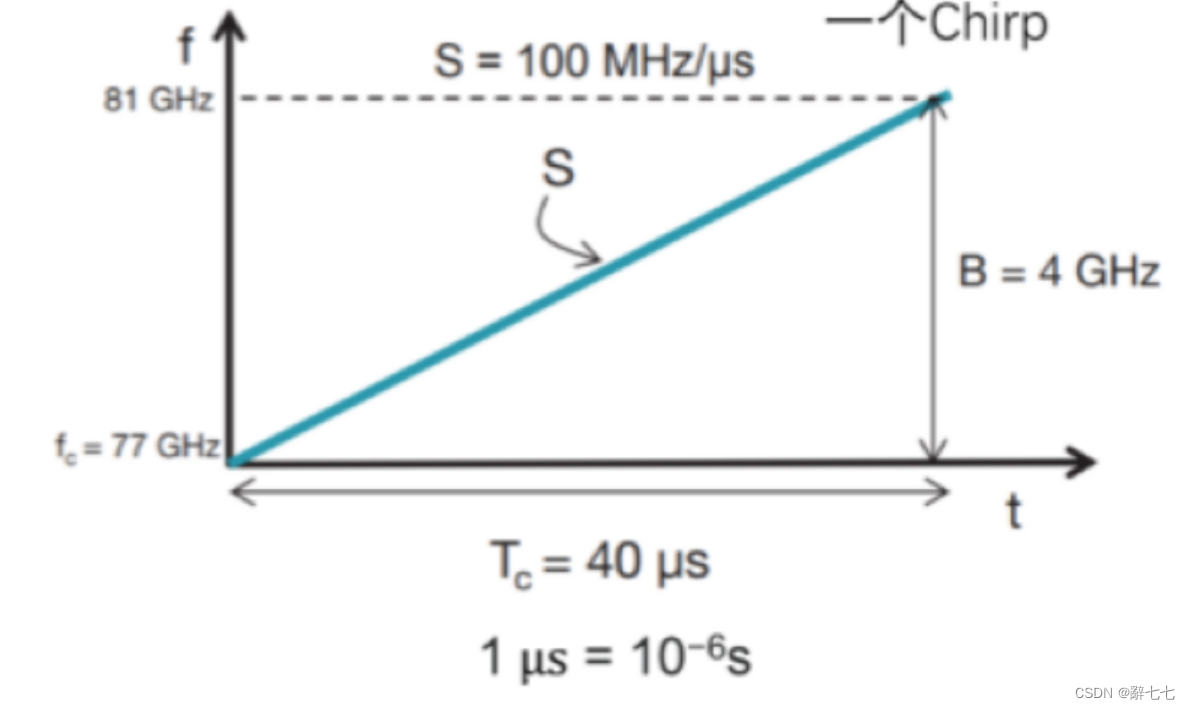
【Apollo】自动驾驶感知——毫米波雷达
作者简介: 辭七七,目前大一,正在学习C/C,Java,Python等 作者主页: 七七的个人主页 文章收录专栏: 七七的闲谈 欢迎大家点赞 👍 收藏 ⭐ 加关注哦!💖…
move_base(teb)实现导航f1tenth仿真车
文章目录 声明一、配置f1tenth相关文件二、配置move_base功能包三、启动导航goal_loop.py声明
以下第二点参考古月居小沐 古月居 http://www.guyuehome.com/34903
一、配置f1tenth相关文件
1、下载功能包(改为对应版本)
sudo apt-get install ros-melodic-tf2-geometry-m…

自动驾驶合成数据科普一:不做真实数据的“颠覆者”,做“杠杆”
前言: 在7月底的一篇文章中,九章智驾提到,数据闭环能力是自动驾驶下半场的“入场券”,这一观点在行业内引起了广泛共鸣。 在数据闭环体系中,仿真技术无疑是非常关键的一环。仿真的起点是数据,而数据又分为真…

修改ros中的控制器,便于仿真和驱动真实UR
UR机械臂学习(5-3):驱动ur机械臂实物——问题及解决_error: 鈥榰r_msgs::setpayloadrequest {aka struct ur__冰激凌啊的博客-程序员宝宝 - 程序员宝宝 (cxybb.com) 问题5 Action client not connected: scaled_pos_traj_controller/follow_j…

【Apollo学习笔记】——规划模块TASK之PIECEWISE_JERK_SPEED_OPTIMIZER
文章目录 前言PIECEWISE_JERK_SPEED_OPTIMIZER功能简介PIECEWISE_JERK_SPEED_OPTIMIZER相关配置PIECEWISE_JERK_SPEED_OPTIMIZER流程QP问题的标准类型定义:优化变量设计目标函数约束条件相关矩阵二次项系数矩阵 H H H一次项系数向量 q q q设定OSQP求解参数 Process设…
疑似特斯拉?三星电机将向美国电动汽车供应超高清摄像头模组
全球知名电子产品制造商三星电机将向美国电动汽车生产商供应超高清摄像头模组,成为重要零部件供应商。据悉,该协议还涉及三星电子旗下的晶圆代工业务部门,为特斯拉代工超过半数下一代自动驾驶芯片。这也意味着三星和特斯拉之间的合作已经加深…
整车电子电器架构和自动驾驶架构的区别
整车电子电器架构和自动驾驶架构的区别:
范围不同:
整车电子电器架构是面向整车电子电器部件的通信、网络和诊断,包含车身、动力、底盘、娱乐和电器等系统;自动驾驶架构是面向智能网联的驾驶辅助功能或高度自动驾驶功能系统的功…
【Apollo】自动驾驶技术的介绍
阿波罗是百度发布的名为“Apollo(阿波罗)”的向汽车行业及自动驾驶领域的合作伙伴提供的软件平台。 帮助汽车行业及自动驾驶领域的合作伙伴结合车辆和硬件系统,快速搭建一套属于自己的自动驾驶系统。 百度开放此项计划旨在建立一个以合作为中…

Cyber RT基础入门与实践_Hello Apollo
Hello Apollo 进入云实验环境模块的模块内包的 进入云实验环境 <1> 创建本节实验工程目录,创建完成后,工程目录如下所示: cyber_demo |-- cyber_01 |-- demo_main | |-- BUILD | |-- main.cc |–BUILD |–cyberfile.xml |–cyber_demo.…
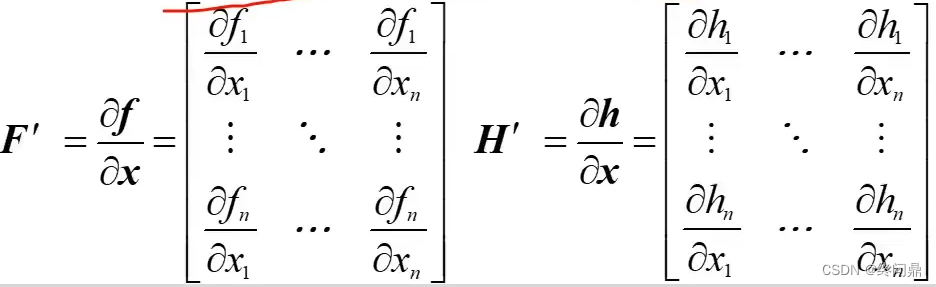
【视觉SLAM入门】7.2. 从卡尔曼滤波到扩展卡尔曼滤波,引入、代码、原理、实战,C++实现以及全部源码
"觇其平生,岂能容物?" 0. 简单认识1. 公式对比解读2. 应用举例3. 解决方案(公式---代码对应)3.1 初始化3.2 EKF3.2.1 预测---状态方程3.2.2 系统协方差矩阵3.2.3 预测---系统协方差矩阵3.2.4 设置测量矩阵3.2.5 更新---状态变量,卡…

基于 Transformation-Equivariant 的自动驾驶 3D 目标检测
论文地址:https://arxiv.org/abs/2211.11962 论文代码:https://github.com/hailanyi/TED
论文背景
三维场景中的物体分布有不同的方向。普通探测器不明确地模拟旋转和反射变换的变化。需要大的网络和广泛的数据增强来进行鲁棒检测。
equivariant netw…
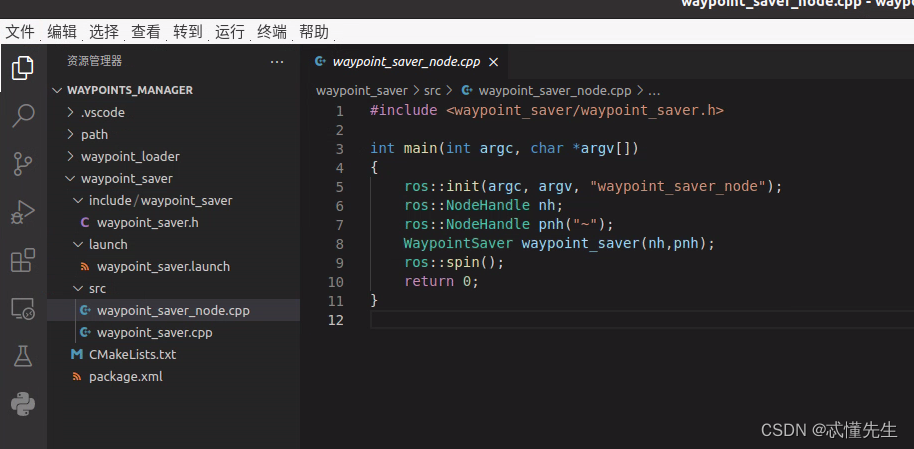
Ros noetic 机器人坐标记录运动路径和发布 实战教程(C)
前言: 承接上一篇博文本文将编写并记录上文中详细的工程项目,用于保存小车的运动路径,生成对应的csv,和加载所保存的路径到实际的Rviz中,本文将开源完整的工程项目,工程结构如下: 工程原码位于文章末尾: 路径存储:
waypoint_saver 用于存储 waypoint 的节点
waypo…

Voxel R-CNN:基于体素的高性能 3D 目标检测
论文地址:https://arxiv.org/abs/2012.15712 论文代码:https://github.com/djiajunustc/Voxel-R-CNN
论文背景
基于点的方法具有较高的检测精度,但基于点的方法通常效率较低,因为对于点集抽象来说,使用点表示来搜索最…

功能定义-泊车距离控制
功能概述 泊车距离控制(Parking Distance Control),简称PDC,其功能表现为在车辆低速行驶过程中,探测其周围障碍物,并当车辆靠近障碍物时为驾驶员提供警告信息
报警区域 其中: 1、2区域对120cm内的障碍物进行报警&…
【实战项目开发技术分享】ChatGPT与机器人的交互
文章目录 前言一、PromptCraft-Robotics1.1 当今机器人技术面临的挑战1.2 ChatGPT如何提供帮助1.3 使用ChatGPT进行机器人任务的设计原则二、EMOTIBOT2.1 使用的技术栈2.2 实现功能2.3 硬件架构三、ROSGPT四、TurtleSim ChatGPT五、Rofunc-ros七、StackChan八、Chatgpt-minipup…

自动驾驶多任务框架Hybridnets——同时处理车辆检测、可驾驶区域分割、车道线分割模型部署(C++/Python)
一、多感知任务
在移动机器人的感知系统,包括自动驾驶汽车和无人机,会使用多种传感器来获取关键信息,从而实现对环境的感知和物体检测。这些传感器包括相机、激光雷达、雷达、惯性测量单元(IMU)、全球导航卫星系统&am…

Apollo自动驾驶平台:从传感器到决策的技术解析
前言: 随着科技的进步,自动驾驶技术正逐渐成为现实。而在这个领域,Baidu的Apollo自动驾驶平台展现出了强大的技术实力。本文将从传感器融合到决策技术,深入解析Apollo自动驾驶的核心技术链。 1. 传感器:Apollo的眼和耳…
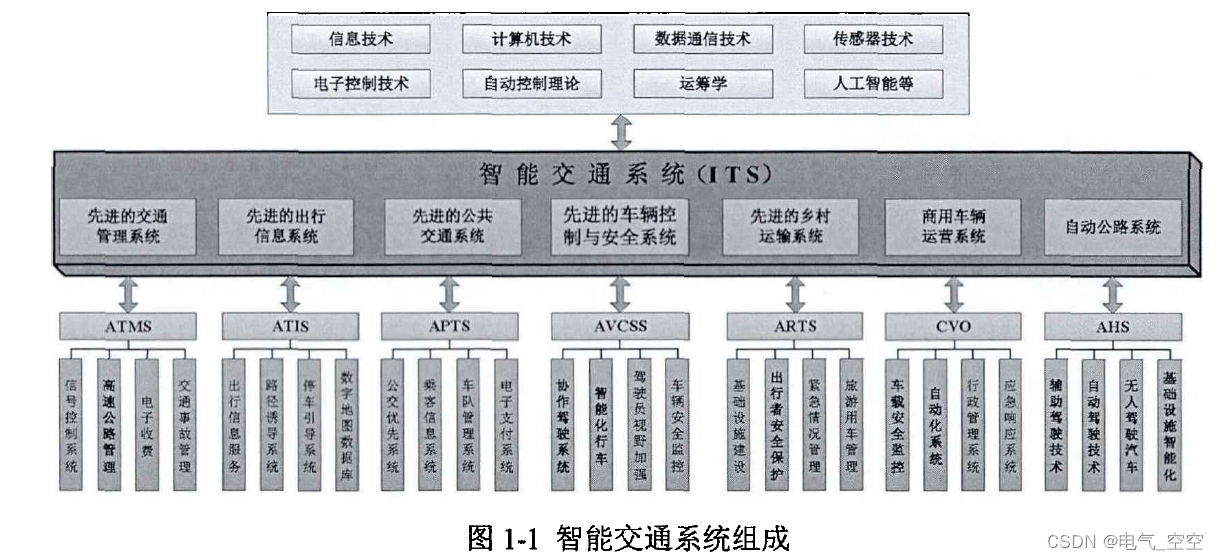
自动驾驶汽车下匝道路径优化控制策略研究
摘要 随着社会不断进步, 经济快速发展, 科学技术也在突飞猛进, 交通行业是典型的领域之一。现阶段的交通发展W 实现智能交通系统为目标, 正逐渐从信息化步入智能化,朝着智慧化迈进。近年来,一系…

辅助驾驶功能开发-控制篇(03)-基于PID的请求角度转扭矩算法
1 文档概述 本文档主要描述请求角度转扭矩的功能、性能要求、算法程序设计,后续可作为程序编程和功能及性能测试参考文档。
2 功能要求 转角扭矩管理(SteeringTorqueManager)将方向盘请求转角转换为电机叠加扭矩,进行横向路径跟踪,并与驾驶员方向盘手感交互,实现自适应调整…

NOA高歌猛进,智驾地图何去何从?
作者|德新
编辑|王博 今年是辅助驾驶的量产大年,尤其高阶智能驾驶,带动了上游需求的爆发。
一些典型的科技赛道,如激光雷达、大算力芯片等环节都从中受益。禾赛科技、地平线近期都公布了产品出货达到新的里程碑。禾赛AT系列产品上半年的出货…
【视觉SLAM入门】7.3.后端优化 基于KF/EKF和基于BA图优化的后端,推导及举例分析
"时间倾诉我的故事" 1. 理论推导2. 主流解法3. 用EKF估计状态3.1. 基于EKF代表解法的感悟 4. 用BA法估计状态4.1 构建最小二乘问题4.2 求解BA推导4.3 H的稀疏结构4.4 根据H稀疏性求解4.5 鲁棒核函数4.6 编程注意 5.总结 引入:
前端里程计能给出一个短时间…
辅助驾驶功能开发-功能算法篇(1)-AEB-自车轨迹预测
1.算法前提与背景 如果按照100km/h车速,8m/s^2减速度计算,需要3.5s的时间,所以需要对车辆进行至少3.5s的轨迹预估,一段Bezier曲线无法满足当前需求,采用四段Bezier曲线即可实现未来4s的估计预估,在这未来4s里,控制器需要对本车车辆进行轨迹的预测、速度加速度的估计,且…
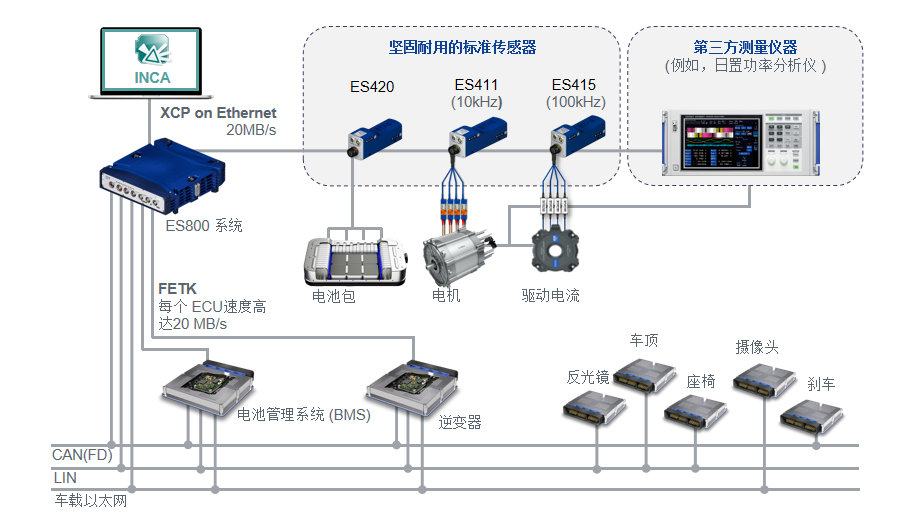
车云一体化数字孪生再跨步!数据「精准反哺」整车定制化开发
汽车智能化竞争焦点,已经从单车智能延伸至云端。
尤其是在软件定义汽车的驱动下,汽车软件开发贯穿整个汽车生命周期。而基于SOA的车云一体化软件开发能力,通过跨车云的服务化架构、数据闭环等,支撑着传统V型瀑布式开发࿰…

Apollo源码安装的问题及解决方法
问题一
在进行git clone时,会报错Failed to connect to github.com port 443: Timed out,经过实践后推荐以下两种方法。
方法一:在原地址前加https://ghproxy.com
原地址:git clone https://github.com/ApolloAuto/apollo.git
…
目标检测YOLO实战应用案例100讲-基于端到端的自动驾驶道路环境目标检测(续)
目录
3.1.2 多尺度小目标检测 3.1.3 Swin Transformer Layer 3.1.4 MCS-YOLO网络结构图
3.2 实验环境及参数设置
基于YOLOv8模型的深海鱼目标检测系统(PyTorch+Pyside6+YOLOv8模型)
摘要:基于YOLOv8模型和BDD数据集的自动驾驶目标检测系统可用于日常生活与海洋中检测与定位深海鱼目标,利用深度学习算法可实现图片、视频、摄像头等方式的目标检测,另外本系统还支持图片、视频等格式的结果可视化与结果导出。本系统采用YOLOv…

Safetynet论文精读
基本信息
团队:Level 5, Toyota收购的Lyft自动驾驶团队(对,这个团队名字就叫Level 5) 年份:2021 官网:https://www.self-driving-cars.org/papers/2022-safetynet(对,他…
9月16日,每日信息差
今天是2023年09月16日,以下是为您准备的15条信息差
第一、天猫超市首单“茅小凌”已由菜鸟送达,首单已由菜鸟供应链完成履约,18分钟送达消费者手中
第二、软银考虑对OpenAI进行投资。此外,软银还初步拟收购英国人工智能芯片制造…
自动驾驶信息安全方案
目录 1. 修订历史... 3
2. 概述... 4
2.1 目的... 4
2.2 适用范围... 4
2.3 参考文档... 4
2.4 术语和缩写... 4
3. 安全分析... 5
4. 总体设计... 6
4.1 ACU的安全防护... 7
4.1.1 系统安全引导... 7
4.1.2 密钥安全存储... 8
4.1.3 应…

自动驾驶中的决策规划
参考: 【干货篇】轻舟智航:自动驾驶中的决策规划技术(附视频回放 PPT 下载) - AIQ 如图所示,
各模块介绍
定位模块主要负责解答的问题是“车现在在哪里”,是在道路上还是在路口,是在高架桥上还是在停车场里。
感知…
10.19 校招 实习 内推 面经
绿*泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格
1、校招 | 中国电子科技集团第十一研究所2024届招聘
校招 | 中国电子科技集团第十一研究所2024届招聘 2、校招 | 中国电子-迈普通信2024届校园招聘
校招 | 中国电子-迈普通信2024届校园招聘…
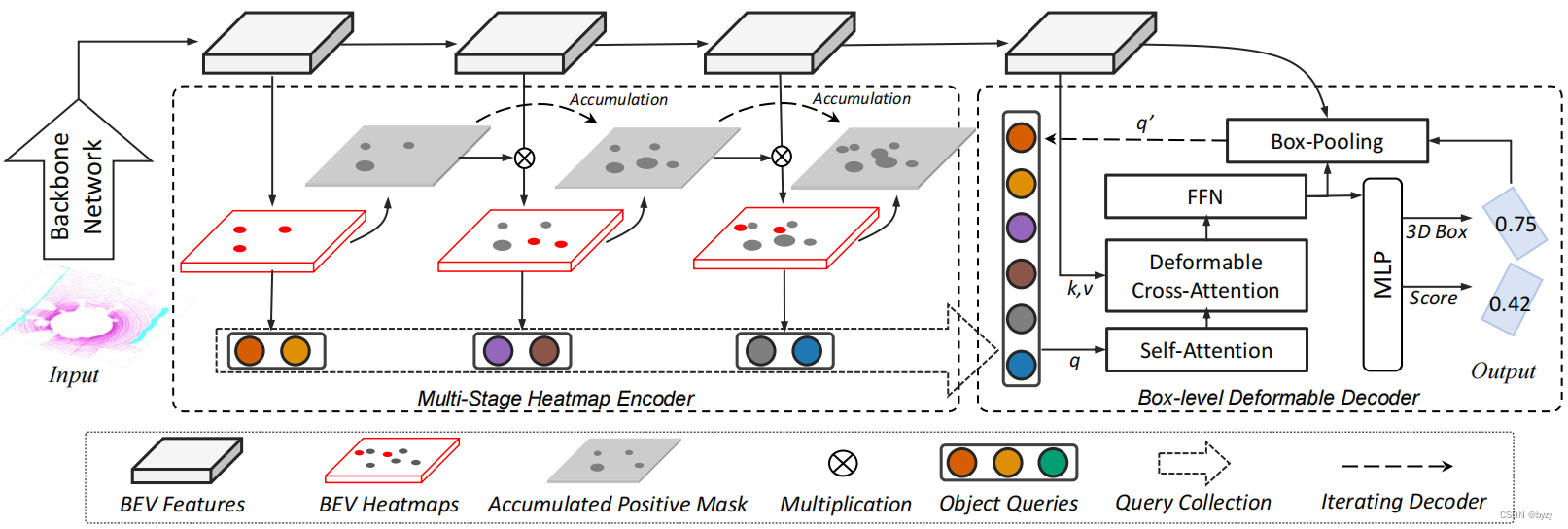
【ICCV 2023】FocalFormer3D : Focusing on Hard Instance for 3D Object Detection
原文链接:https://arxiv.org/abs/2308.04556
1. 引言 目前的3D目标检测方法没有显式地去考虑漏检问题。 本文提出了困难实例探测(HIP)。受目标检测的级联解码头启发,HIP逐步探测误检样本,极大提高召回率。在每个阶…
SLAM从入门到精通(IMU参数的读取)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing 163.com】 上一篇文章我们说过,对于差速轮来说,旋转的计算很多程度上依赖于thetatan(theta)这个公式来进行的。但是,我们也…
基于YOLOv8模型的头盔行人检测系统(PyTorch+Pyside6+YOLOv8模型)
摘要:基于YOLOv8模型的头盔行人检测系统可用于日常生活中检测与定位头盔与行人目标,利用深度学习算法可实现图片、视频、摄像头等方式的目标检测,另外本系统还支持图片、视频等格式的结果可视化与结果导出。本系统采用YOLOv8目标检测算法训练…

【论文笔记】A Review of Motion Planning for Highway Autonomous Driving
文章目录 I. INTRODUCTIONII. CONSIDERATIONS FOR HIGHWAY MOTION PLANNINGA. TerminologyB. Motion Planning SchemeC. Specificities of Highway DrivingD. Constraints on Highway DrivingE. What Is at Stake in this Paper III. STATE OF THE ARTA. Taxonomy DescriptionB…
关于车载毫米波雷达(是否被)遮挡问题的讨论
说明 车载毫米波雷达遮挡状态的判断和输出是雷达SOR中要求具备的一项基本“功能”,但是该话题网上的相关内容较少,本博文试图对该问题进行探讨。内容相对简单,但是在产品研发中不可不察。 Blog
20230926 本文第一次撰写 目录
说明
目录
…
汽车电子——产品标准规范汇总和梳理(自动驾驶)
文章目录
前言
一、分级
二、定位
三、地图
四、座舱
五、远程
六、信息数据
七、场景
八、智慧城市
九、方法论
总结 前言 见《汽车电子——产品标准规范汇总和梳理》 一、分级 《GB/T 40429-2021 汽车驾驶自动化分级》 《QC/T XXXXX—XXXX 智能网联汽车 自动驾…
apollo自动驾驶技术
什么是自动驾驶车辆
是由控制器,传感器,执行器和通讯模块实现(辅助或)代替驾驶员对车辆操控的智能汽车
自动驾驶智能系统
包括环境感知,认知,驾驶决策规划,控制和执行等能力
自动驾驶智能系…

论文精读NMP:Neural Map Prior for Autonomous Driving
1 基本背景2 Motivation3 相关研究基于激光SLAM的建图基于学习的语义建图Semantic learning mapping神经表示 4 解决方案4.1 问题说明4.2 局部地图推理local map inference4.2.1 positional embedding4.2.2 地图融合 4.3 全局地图先验更新global map prior update 5 实验5.1 实…
ROS2 库包设置和使用 Catch2 进行单元测试
说明 本文的目的是了解如何在 ROS2 中创建库,以供其他 ROS2 包使用。除此之外,本文还介绍了如何使用 catch2 框架编写单元测试。本文的第 1 部分将详细介绍如何创建库包。第 2 部分将介绍 ROS2 软件包如何利用创建的库 上篇 ROS2 库包设置和使用 Catch2…

自动驾驶中的感知模型:实现安全与智能驾驶的关键
自动驾驶中的感知模型:实现安全与智能驾驶的关键 文章目录 引言感知模型的作用感知模型的技术安全与挑战结论 2023星火培训【专项营】Apollo开发者社区布道师倾力打造,包含PnC、新感知等的全新专项课程上线了。理论与实践相结合,全新的PnC培训…
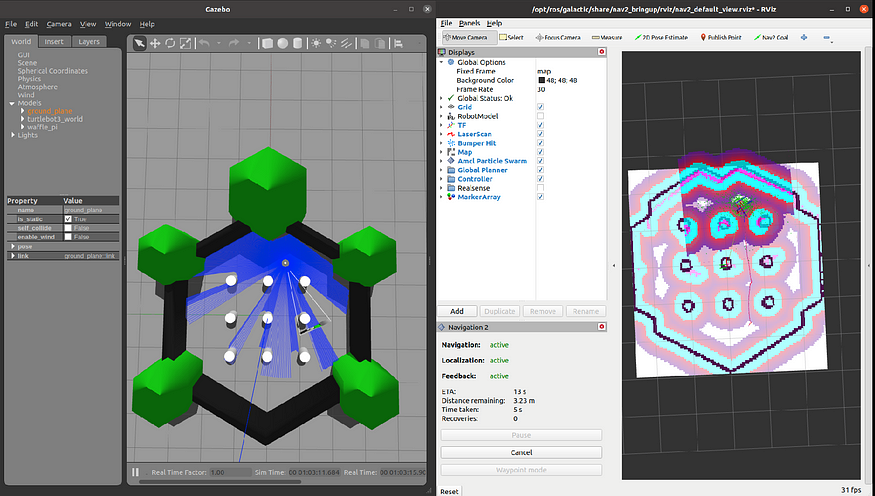
构建捡垃圾机器人的 ROS 2 项目
一、说明 本系列是关于学习如何使用 ROS2、Docker 和 Github 设计、设置和维护机器人项目。 先决条件 — ROS2 软件包的基本知识、实现发布者、订阅者、操作并连接它们。 我们之前在 ROS2 中了解了不同的部分。但是,在我们转向实际的基于硬件的项目之前,…

Mapfree智驾方案,怎样实现成本可控?
整理|睿思
编辑|祥威 编者注:本文是HiEV出品的系列直播「智驾地图之变」第二期问答环节内容整理。
元戎启行副总裁刘轩与连线嘉宾奥维咨询董事合伙人张君毅、北汽研究总院智能网联中心专业总师林大洋、主持嘉宾周琳展开深度交流,并进行了答疑。
本期元…

特斯拉被称为自动驾驶领域的苹果
特斯拉的自动驾驶技术无疑是居于世界上领先地位的,有人形容特斯拉是自动驾驶汽车领域的苹果。特斯拉发布的Tesla Vision系统只配备了摄像头,不依靠雷达。 这并不是特斯拉唯一和其它对手不同的地方,他们的整个战略都是基于车队和销售产品,而其大多数竞争对手则销售自…
辅助驾驶功能开发-功能对标篇(8)-NOA领航辅助系统-上汽非凡
1.横向对标参数 厂商上汽非凡车型R7上市时间2022Q3方案12V8R1L+1DMS摄像头前视摄像头1*(8M)+2*(2M)侧视摄像头4后视摄像头1环视摄像头4DMS摄像头1雷达毫米波雷达4*(Hella)4D毫米波雷达2*(前+后,采埃孚PREMIUM)超声波雷达12激光雷达1*(luminar旗下Iris,等效640线,1550nm)域控供应…

ros2移植Apollo和autoware规控算法可跑工程
工程详细介绍请看: 自动驾驶路径规划控制ros移植Apollo和autoware规控算法可跑工程(适合入门学习,科研和实战)
ros2的工程版本说明
之所以增加ros2版本,是因为想增加代码的工程应用性,其实对于科研来说并…
基于YOLOv8模型的船只目标检测系统(PyTorch+Pyside6+YOLOv8模型)
摘要:基于YOLOv8模型的船只目标检测系统可用于日常生活中检测与定位船只目标,利用深度学习算法可实现图片、视频、摄像头等方式的目标检测,另外本系统还支持图片、视频等格式的结果可视化与结果导出。本系统采用YOLOv8目标检测算法训练数据集…

自动驾驶学习笔记(一)——Apollo平台
#Apollo开发者社区#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往:
《自动驾驶新人之旅》免费课程—> 传送门
《2023星火培训【感知专项营】》免费课程—>传送门 文章目录
前言
Apollo框架
开发平台
总结 前…

CDC前装增速接近50%!哪些供应商领跑电控可变悬架赛道
作为汽车智能化提升驾驶和乘坐体验的关键环节,智能化的底盘悬架系统正在进入规模化上车的市场红利周期。 通常来说,智能底盘是能够通过传感器、控制单元和执行器等组件实现实时监测和自动调节,以适应不同路况和驾驶需求,提供更加舒…
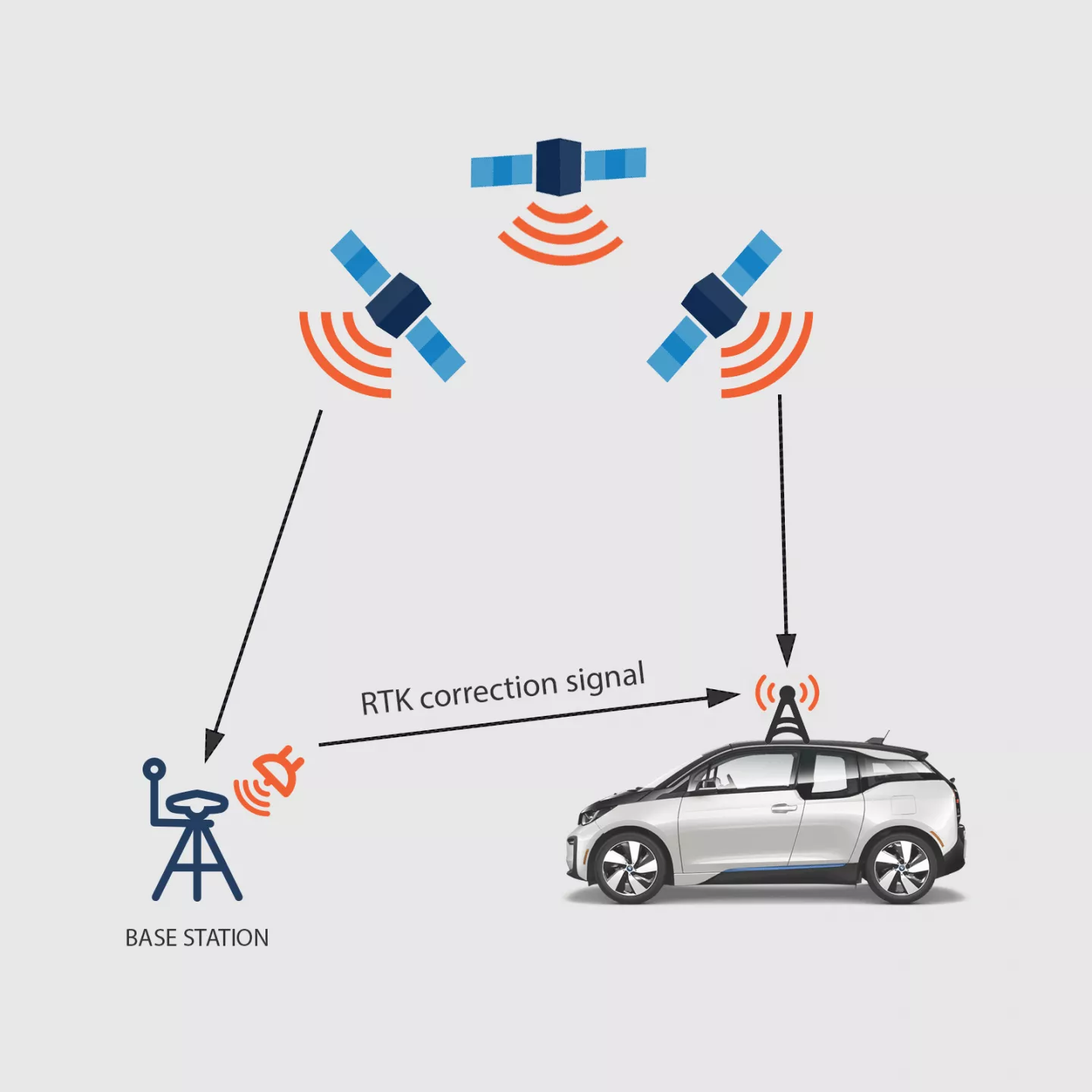

探秘小米增程汽车与仿生机器人的未来:AI大模型的潜在影响及苹果iPhone15Pro发热问题解决之道
🌷🍁 博主猫头虎 带您 Go to New World.✨🍁 🦄 博客首页——猫头虎的博客🎐 🐳《面试题大全专栏》 文章图文并茂🦕生动形象🦖简单易学!欢迎大家来踩踩~🌺 &a…
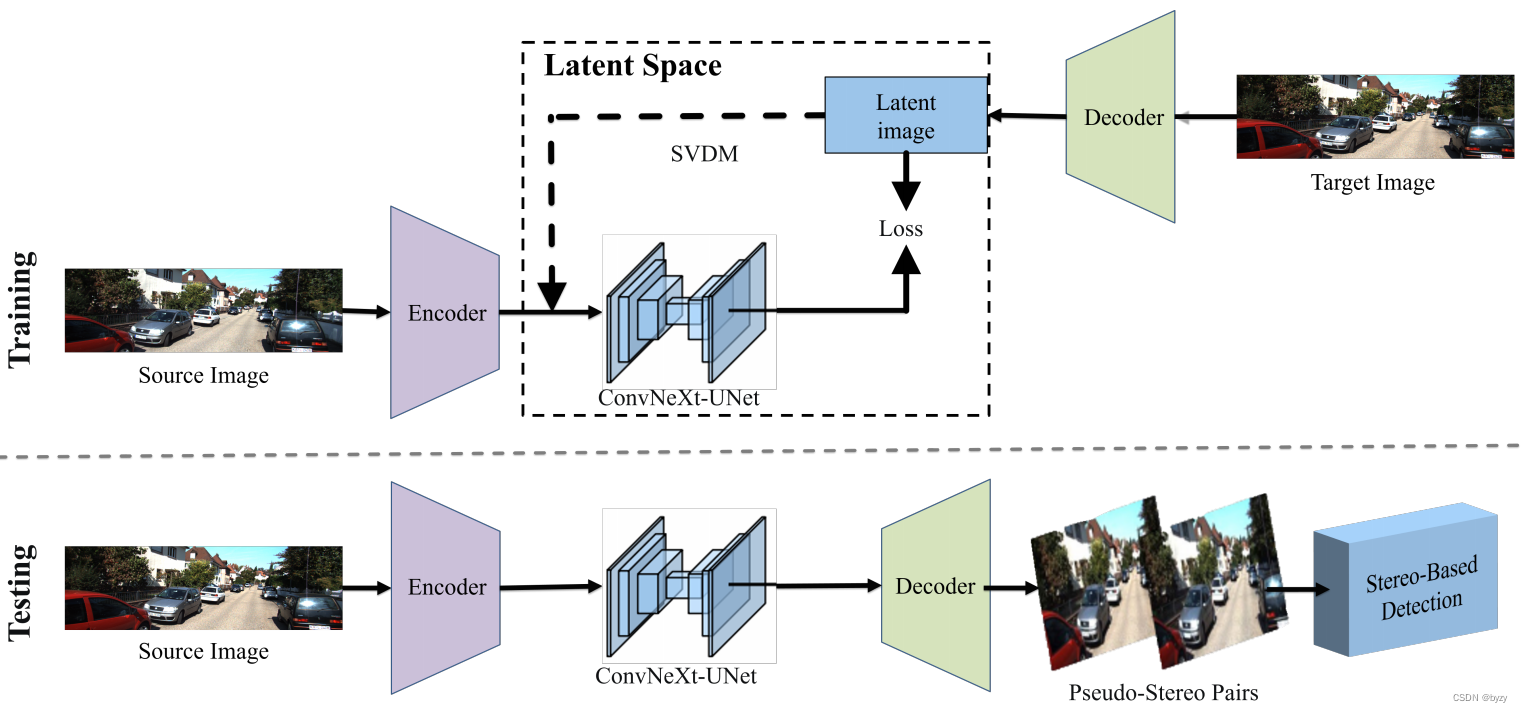
【论文笔记】SVDM: Single-View Diffusion Model for Pseudo-Stereo 3D Object Detection
原文链接:https://arxiv.org/abs/2307.02270
1. 引言 目前的从单目相机生成伪传感器表达的方法依赖预训练的深度估计网络。这些方法需要深度标签来训练深度估计网络,且伪立体方法通过图像正向变形合成立体图像,会导致遮挡区域的像素伪影、扭…

自动驾驶技术:现状与未来
自动驾驶技术:现状与未来 文章目录 引言自动驾驶技术的现状自动驾驶技术的挑战自动驾驶技术的未来结论结论 2023星火培训【专项营】Apollo开发者社区布道师倾力打造,包含PnC、新感知等的全新专项课程上线了。理论与实践相结合,全新的PnC培训不…

景联文科技:AI大模型强势赋能,助力自动驾驶迭代升级
我国一直以来都将自动驾驶作为新兴产业发展的重点领域之一,工信部等相关部委出台了一系列自动驾驶发展战略、规划和标准,一些地方政府也在积极开展关于自动驾驶的地方立法,为自动驾驶技术的研发和应用提供更加具体的法律保障。例如࿰…

中国汽车供应商远赴德国,中国智驾方案能否远渡重洋?
作者|Amy
编辑|德新
今年的上海车展,中国智能汽车的进步有目共睹,吸引了大批外企高管和研发人员的关注,甚至引发了海外车企一系列的动作和调整。
而在刚刚结束的慕尼黑车展,中国车企及汽车供应链把「肌肉」秀到了现代汽车起源地…
高速自动驾驶HMI人机交互
概述 目的 本文档的目的是描述高速自动驾驶功能涉及的HMI显示需求技术规范和设计说明。 范围 术语及缩写 设计与实验标准 设计标准 设计标准-非法规类设计标准-法规类 HMI交互需求 CL4功能界面
HMI显示器[伊1] 中应包含CL4功能设置界面,提供给用户进行设置操作或显…

阅读LINGO-1: Exploring Natural Language for Autonomous Driving
1 背景2 Motivation3 具体过程 1 背景
wayve在9月14日公布了大语言模型和自动驾驶的结合模型LINGO-1,可以用自然语言解释自动驾驶的决策原因。 网页链接:https://wayve.ai/thinking/lingo-natural-language-autonomous-driving/ 但是目前没有论文和开源…
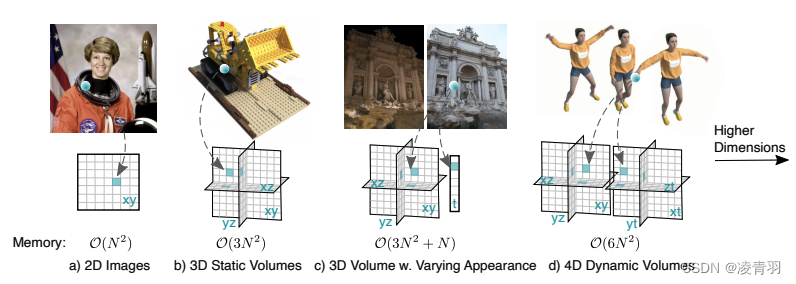
MARS: An Instance-aware, Modular and Realistic Simulator for Autonomous Driving
● MARS: An Instance-aware, Modular and Realistic Simulator for Autonomous Driving(基于神经辐射场的自动驾驶仿真器) ● https://github.com/OPEN-AIR-SUN/mars ● https://arxiv.org/pdf/2307.15058.pdf ● https://mp.weixin.qq.com/s/6Ion_DZGJ…
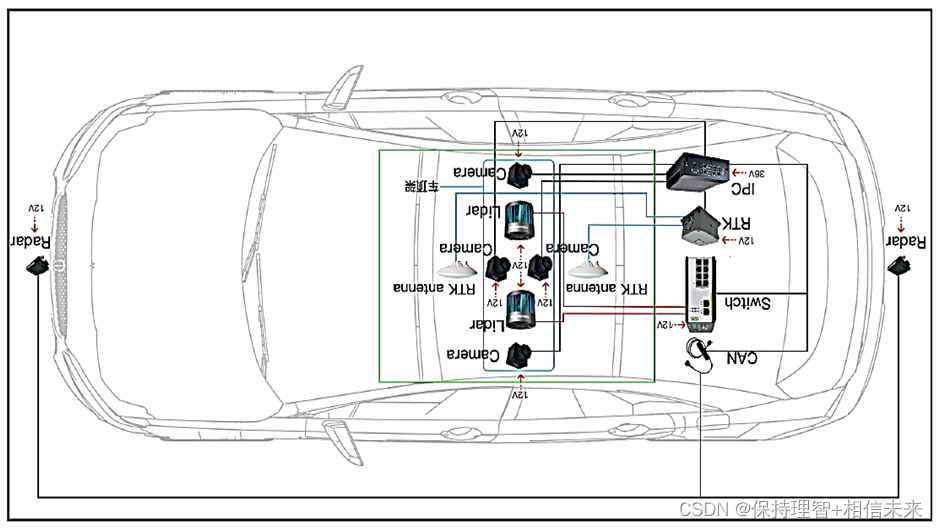
辅助驾驶功能开发-测试篇(2)-真值系统介绍
1 真值系统概述
1.1 真值评测系统核心应用 快速构建有效感知真值,快速完成感知性能评估,快速分析感知性能缺陷。 主要应用场景包括: 1. 感知算法开发验证: 在算法开发周期中,评测结果可以作为测试报告的一部分,体现算法性能的提升。 2. 遴选供应…

自动驾驶:未来的道路上的挑战与机遇
自动驾驶:未来的道路上的挑战与机遇 文章目录 引言安全与道路事故的减少交通拥堵的缓解城市规划的变革技术和法律挑战结语 2023星火培训【专项营】Apollo开发者社区布道师倾力打造,包含PnC、新感知等的全新专项课程上线了。理论与实践相结合,…
五. 激光雷达建图和定位方案-开源SLAM
前面内容: 一. 器件选型心得(系统设计)--1_goldqiu的博客-CSDN博客
一. 器件选型心得(系统设计)--2_goldqiu的博客-CSDN博客
二. 多传感器时间同步方案(时序闭环)--1
三. 多传感器标定方案&a…
点云从入门到精通技术详解100篇-雨雾环境下多传感器融合SLAM方法(续)
目录
4 基于球面投影的激光视觉融合里程计
4.1 引言
4.2 视觉惯性里程计
4.2.1特征点提取与匹配
![[ROS2系列] ORBBEC(奥比中光)AstraPro相机在ROS2进行rtabmap 3D建图](https://img-blog.csdnimg.cn/933f27029fa743439f5389f503e9f7a1.png)
[ROS2系列] ORBBEC(奥比中光)AstraPro相机在ROS2进行rtabmap 3D建图
目录
背景:
一、驱动AstraPro摄像头
二、安装rtabmap
error1:缺包
三、尝试
四、参数讲解
五、运行
error2: Did not receive data since 5 seconds!
六、效果编辑
error4: 背景:
1、设备:pc;jeston agx …
SLAM从入门到精通(从仿真到实践)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing 163.com】 之前花了40多篇文章,弄清了什么是slam,怎么学习slam,什么是ros,怎么利用ros来学好slam等等。不仅如…
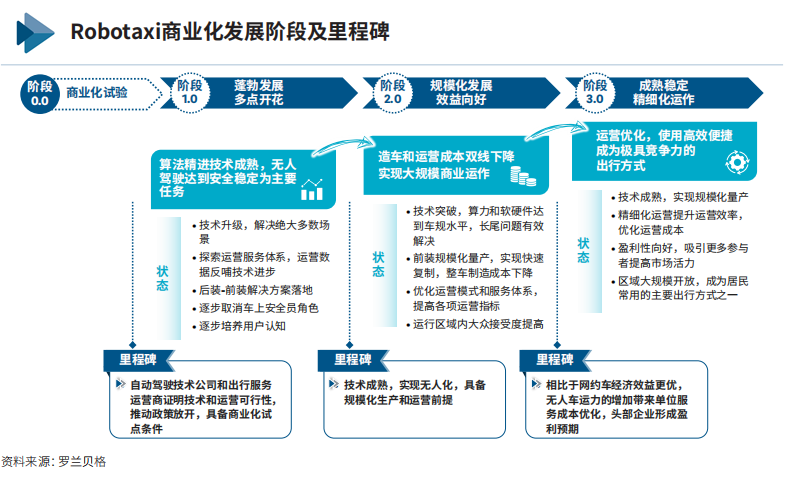
自动驾驶的商业应用和市场前景
自动驾驶技术已经成为了交通运输领域的一项重要创新。它不仅在改善交通安全性和效率方面具有巨大潜力,还为各种商业应用提供了新的机会。本文将探讨自动驾驶在交通运输中的潜力,自动驾驶汽车的制造商和技术公司,以及自动驾驶的商业模式和市场…
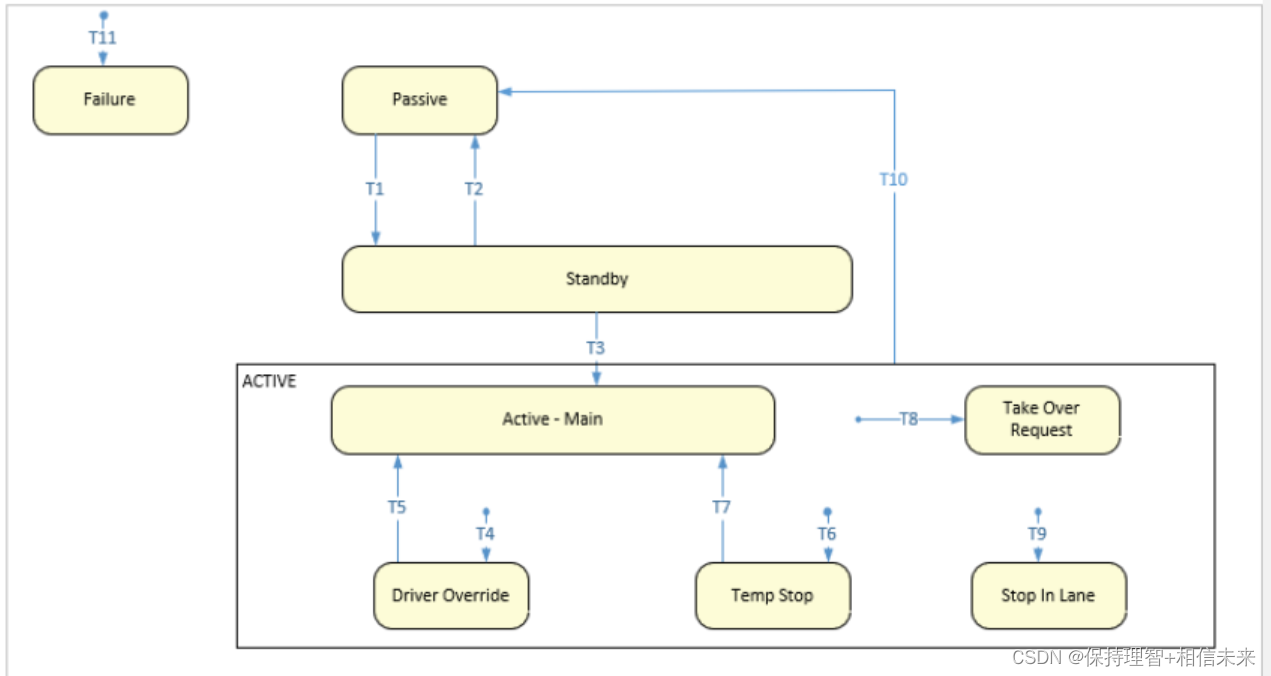
辅助驾驶功能开发-功能规范篇(23)-2-Mobileye NOP功能规范
5.2 状态机要求
5.2.1 NOP/HWP 状态机 NOP/HWP状态机如下所示: 下表总结了这些状态: 状态描述Passive不满足功能条件,功能无法控制车辆执行器。Standby满足功能条件。该功能不是由驾驶员激活的。功能不控制车辆执行器。Active - Main功能由驾驶员激活。功能是控制…
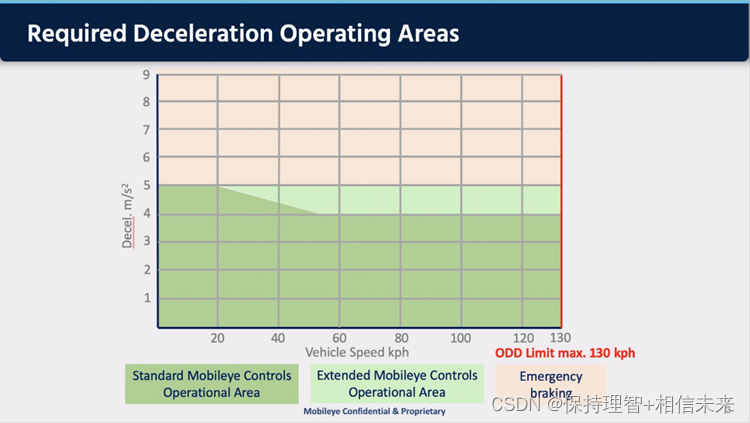
辅助驾驶功能开发-执行器篇(03)-Mobileye Control Requirements
1. 目的 本文描述了产品开发不同阶段(研发、验证和产品化)车辆集成的控制要求。
2. 控制接口要求
2.1 接口类型 控制模块与车辆之间的接口应基于CAN协议或Flexray协议。
2.2 通讯频率 控制模块与车辆之间的通讯频率应高于36Hz。通信频率优先选择为 50 Hz。
2.3 延迟 所有…
辅助驾驶功能开发-功能对标篇(12)-NOA领航辅助系统-合众
1.横向对标参数 厂商和众车型哪吒S上市时间2022方案11V5R3L+1DMS摄像头前视摄像头2*(8M)侧视摄像头4后视摄像头1环视摄像头4DMS摄像头1雷达毫米波雷达54D毫米波雷达/超声波雷达12激光雷达2*(华为96线,905nm)域控供应商1*(华为MDC610)辅助驾驶软件供应商自研TA PILOT高精度地图…
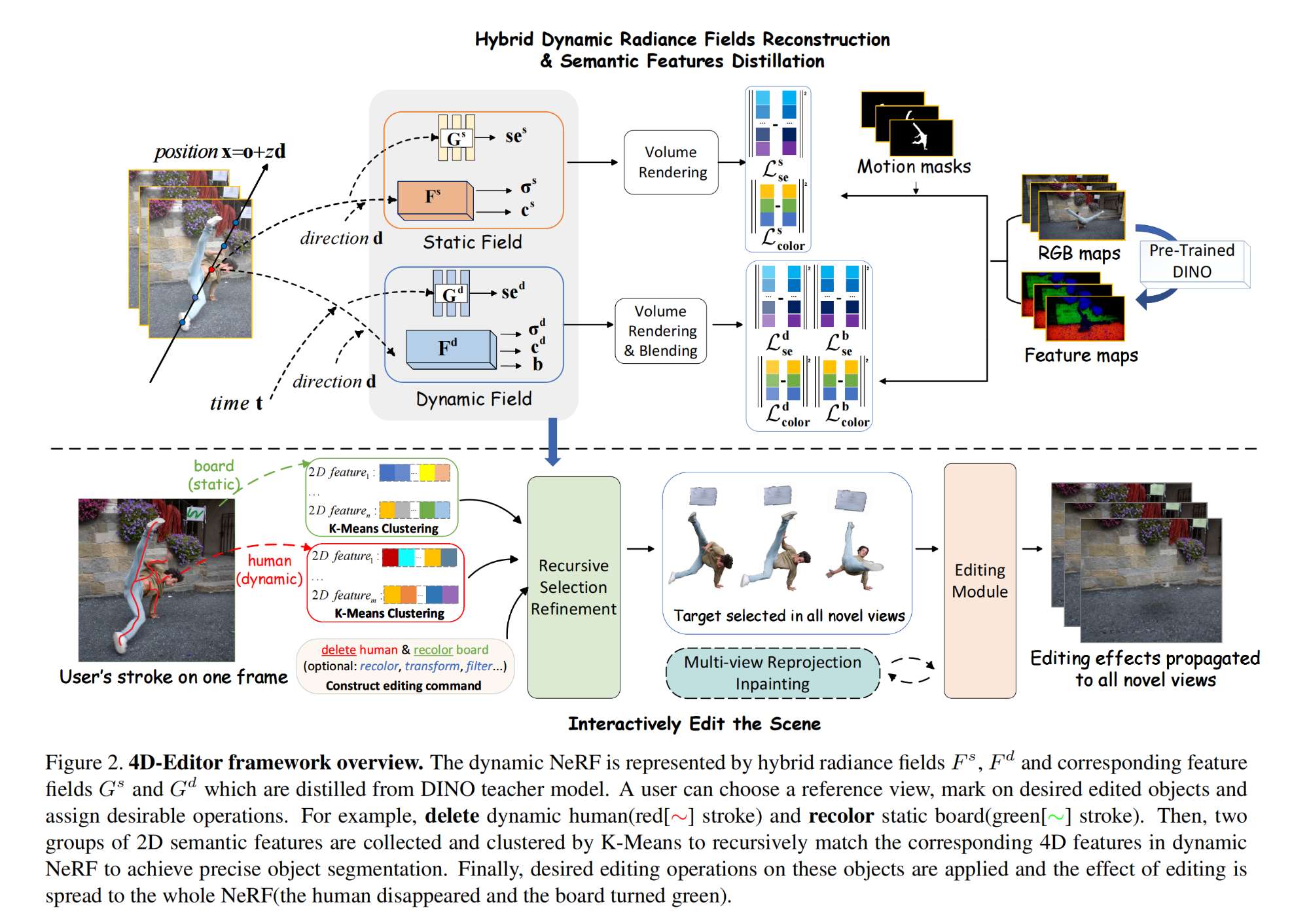
CV计算机视觉每日开源代码Paper with code速览-2023.10.27
精华置顶 墙裂推荐!小白如何1个月系统学习CV核心知识:链接 点击CV计算机视觉,关注更多CV干货
论文已打包,点击进入—>下载界面
点击加入—>CV计算机视觉交流群
1.【基础网络架构:Transformer】(Ne…
实时检测并识别视频中的汽车车牌
对于基于摄像头监控的安全系统来说,识别汽车牌照是一项非常重要的任务。我们可以使用一些计算机视觉技术从图像中提取车牌,然后我们可以使用光学字符识别来识别车牌号码。在这里,我将引导您完成此任务的整个过程。 要求:
import cv2import numpy as npfrom skimage impor…

未来的无人驾驶时代会对我们带来哪些影响?
未来的无人驾驶时代:无人驾驶技术发展现状、未来趋势以及迈入无人驾驶时代后会给我们带来哪些积极影响
过去,说起无人驾驶汽车,就像是科幻小说中的情节。但时至今日,这种情况已经改观:谷歌、特斯拉、福特等多家大型公…
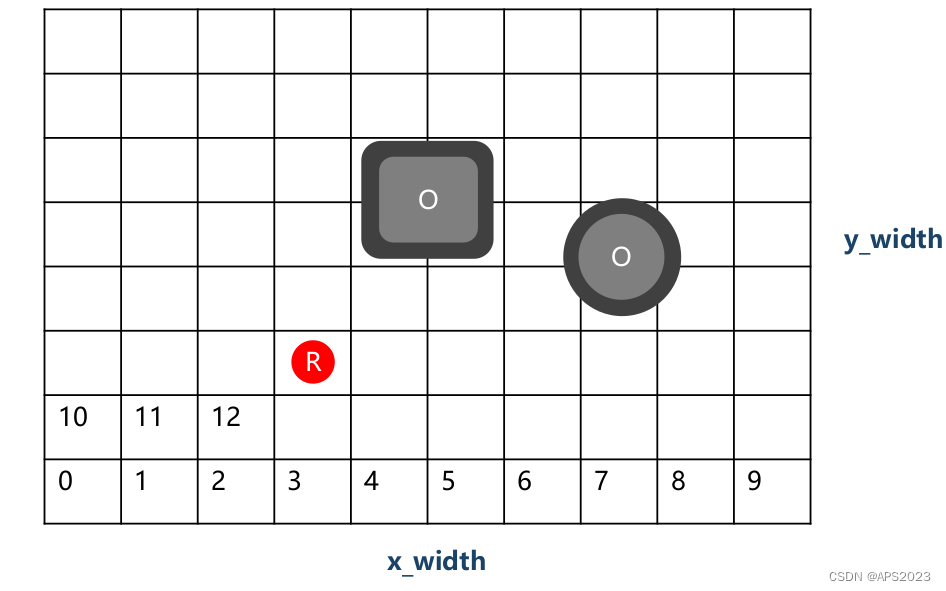
自动驾驶算法(一):Dijkstra算法讲解与代码实现
目录 0 本节关键词:栅格地图、算法、路径规划
1 Dijkstra算法详解
2 Dijkstra代码详解 0 本节关键词:栅格地图、算法、路径规划 1 Dijkstra算法详解 用于图中寻找最短路径。节点是地点,边是权重。 从起点开始逐步扩展,每一步为一…
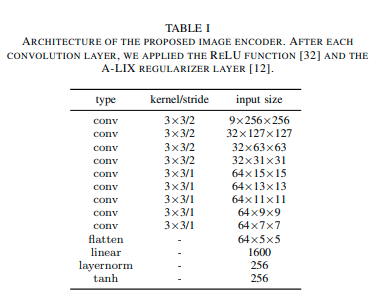
经典文献阅读之--RLAD(城市环境中自动驾驶从像素进行强化学习)
0. 简介
强化学习在自动驾驶中的应用已经日渐普及,虽然由于一些伦理问题,目前真正的使用这种强化学习的还不是很多,但是目前已经有很多应用在自动驾驶中的强化学习的工作,但是我们发现这类方法基本都是将卷积编码器与策略网络一起…
9.25 校招 实习 内推 面经
绿泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格
1、校招 | 达闼机器人2024届校园招聘正式启动
校招 | 达闼机器人2024届校园招聘正式启动 2、2023校招总结--自动驾驶规控算法 - 10
2023校招总结--自动驾驶规控算法 - 10 3、校招 | 腾讯北极…
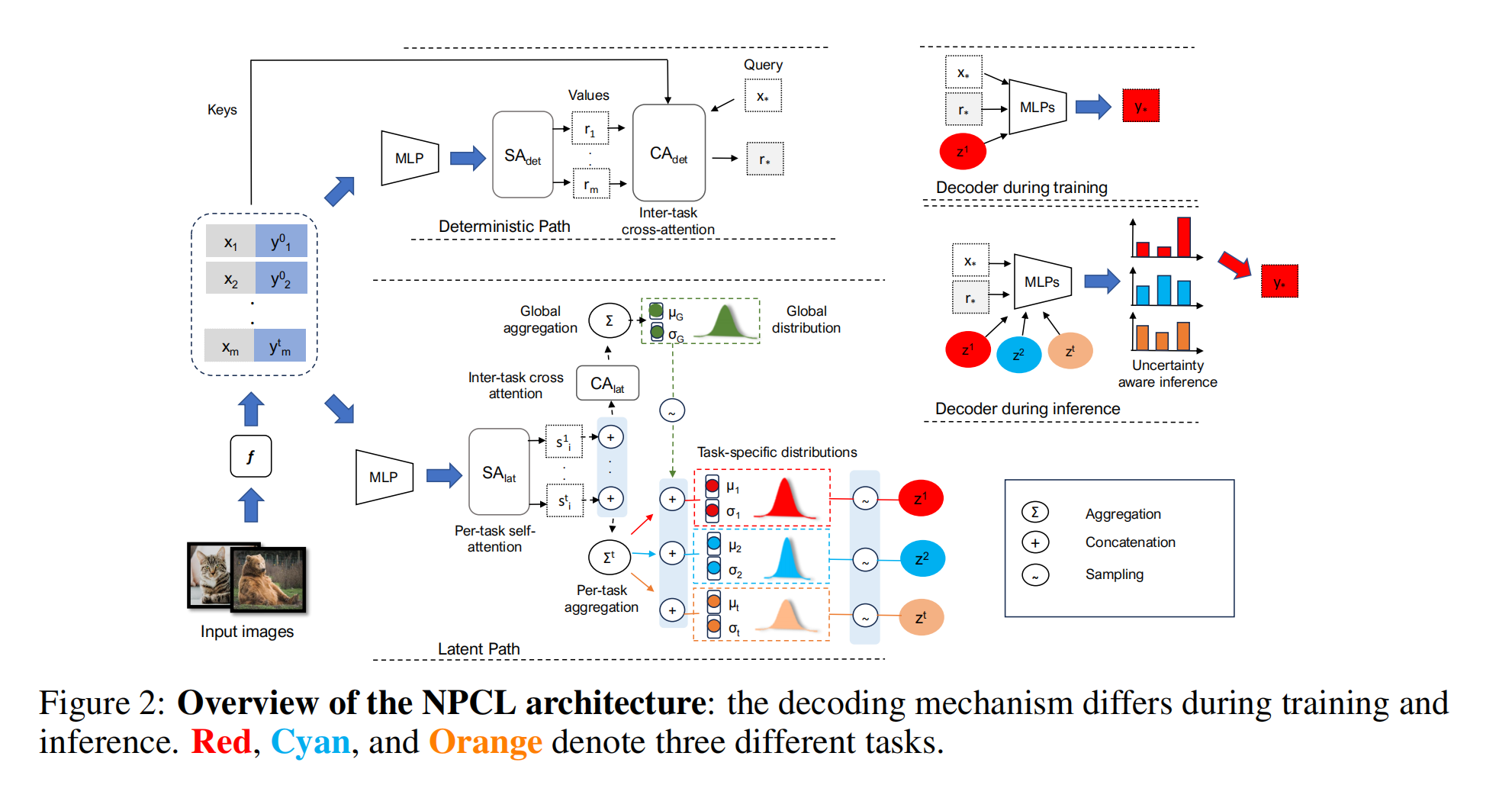
CV计算机视觉每日开源代码Paper with code速览-2023.10.31
精华置顶 墙裂推荐!小白如何1个月系统学习CV核心知识:链接 点击CV计算机视觉,关注更多CV干货
论文已打包,点击进入—>下载界面
点击加入—>CV计算机视觉交流群
1.【基础网络架构】(NeurIPS2023)Fa…
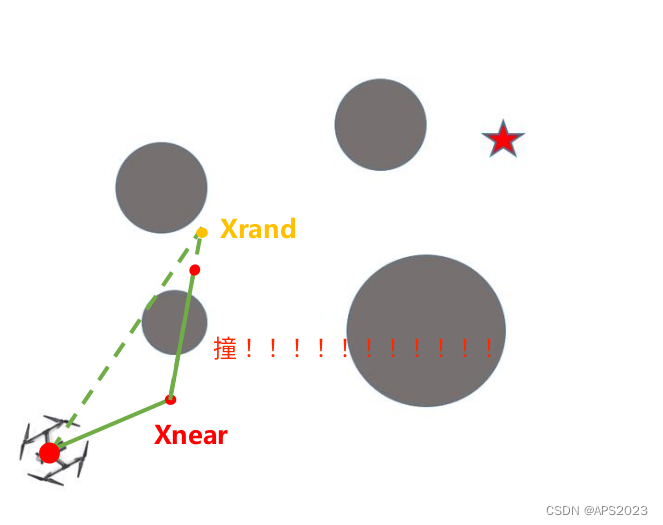
自动驾驶算法(三):RRT算法讲解与代码实现(基于采样的路径规划)
目录 1 RRT算法原理
2 RRT算法代码解析
3 RRT完整代码 1 RRT算法原理 RRT算法的全称是快速扩展随机树算法(Rapidly Exploring Random Tree),它的想法就是从根结点长出一棵树当树枝长到终点的时候这样就能找到从终点到根节点的唯一路径。 算法流程: 首先…

自动驾驶学习笔记(三)——场景设计
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往:
《自动驾驶新人之旅》免费课程—> 传送门
《2023星火培训【感知专项营】》免费课程—>传送门
文章目录 前言
场景设计平台
场景地图
场景基本…
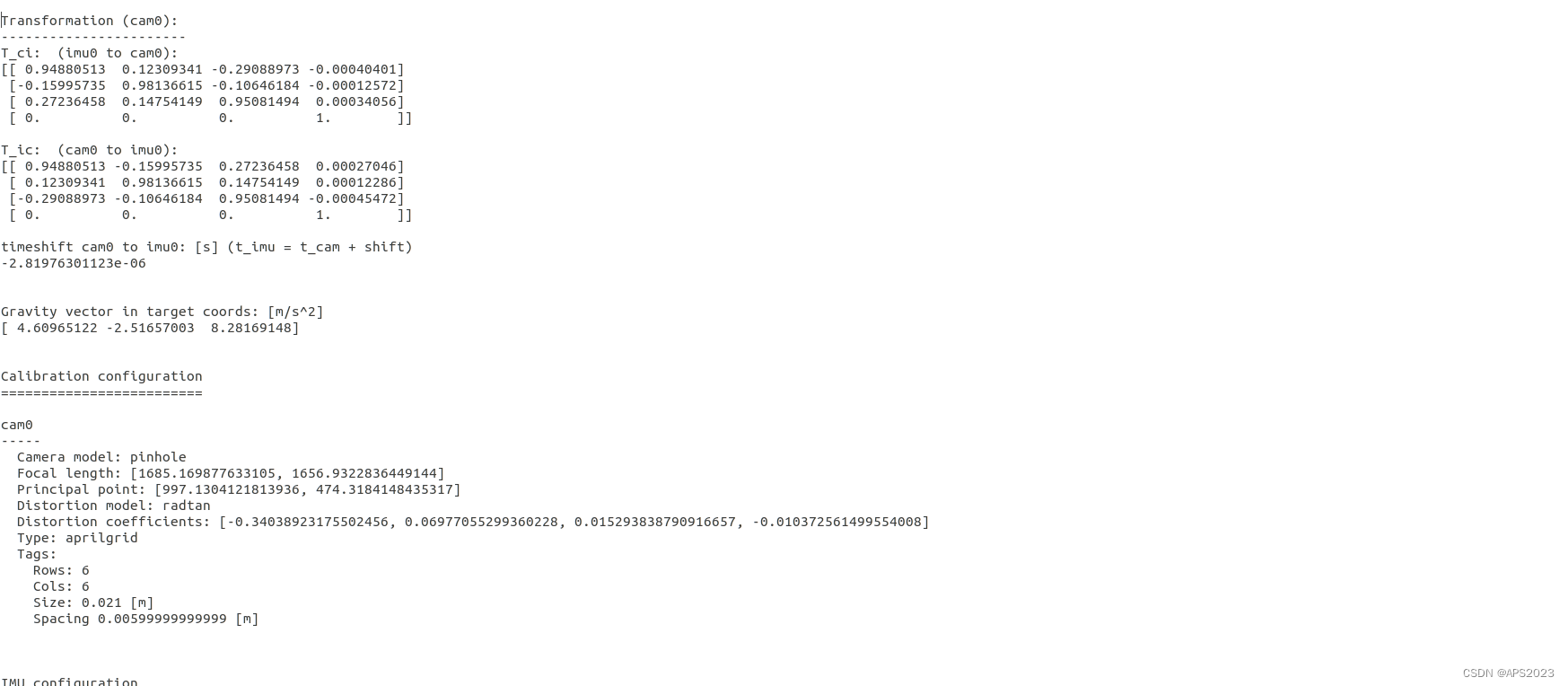
使用kaliber与imu_utils进行IMU、相机+IMU联合标定
目录 1 标定工具编译
1.1 IMU标定工具 imu_utils
1.2 相机标定工具 kaliber
2 标定数据录制
3 开始标定
3.1 IMU标定
3.2 相机标定
3.3 相机IMU联合标定
4 将参数填入ORBSLAM的文件中 1 标定工具编译
1.1 IMU标定工具 imu_utils 标定IMU我们使用imu_utils软件进行标定…

领跑新周期!高通8295/8255上车,这家厂商已经整装待发
围绕高通下一代8295/8255平台,一场激烈的市场争夺战已经打响。
目前,各大域控制器厂商、汽车软件厂商围绕高通8295/8255平台,已经推出了诸多的解决方案,以抢占下一代高性能SoC带来的全新市场红利。《高工智能汽车》了解到&#x…
【AI视野·今日Robot 机器人论文速览 第五十二期】Wed, 11 Oct 2023
AI视野今日CS.Robotics 机器人学论文速览 Wed, 11 Oct 2023 Totally 31 papers 👉上期速览✈更多精彩请移步主页 Daily Robotics Papers
RoboHive: A Unified Framework for Robot Learning Authors Vikash Kumar, Rutav Shah, Gaoyue Zhou, Vincent Moens, Vittor…
Lift, Splat, Shoot图像BEV安装与模型详解
1 前言
计算机视觉算法通常使用图像是作为输入并输出预测的结果,但是对结果所在的坐标系却并不关心,例如图像分类、图像分割、图像检测等任务中,输出的结果均在原始的图像坐标系中。因此这种范式不能很好的与自动驾驶契合。
在自动驾驶中,多个相机传感器的数据一起作为输…
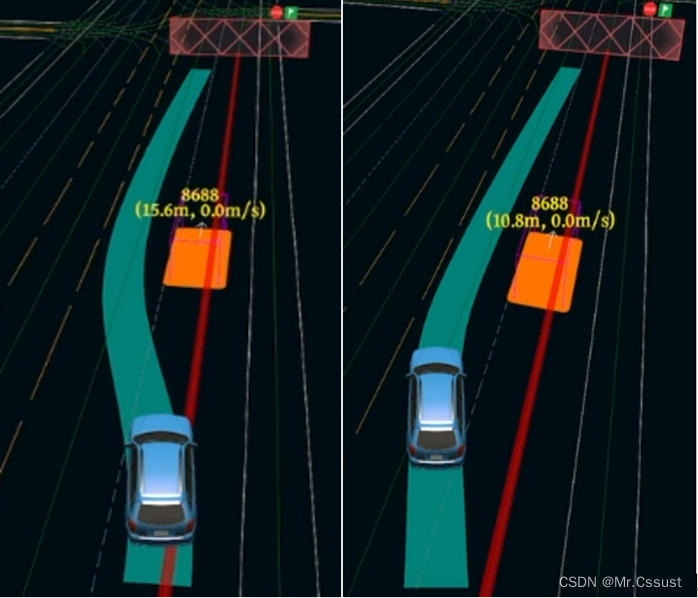
自动驾驶学习笔记(五)——绕行距离调试
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往:
《自动驾驶新人之旅》免费课程—> 传送门
《2023星火培训【感知专项营】》免费课程—>传送门 文章目录
前言
调试内容
打开在线编辑器
打开pl…

【论文精读】NMP: End-to-end Interpretable Neural Motion Planner
toc
1 背景信息
团队:Uber,多伦大大学 年份:2019 论文链接:https://arxiv.org/abs/2101.06679
2 Motivation
深度学习方案受限于累积误差suffers from the compounding error,而且可解释性差interpretability is d…
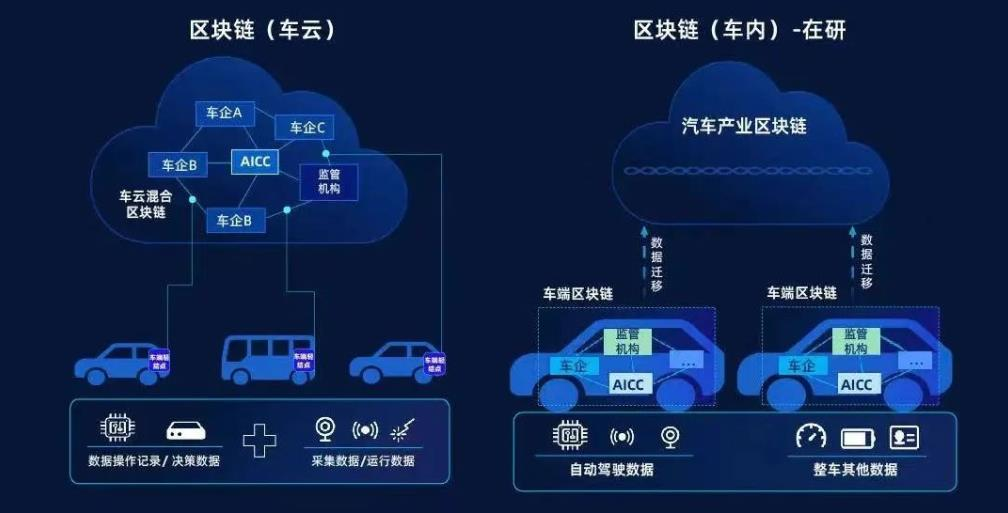
自动驾驶中的数据安全和隐私
自动驾驶技术的发展已经改变了我们的出行方式,但伴随着这项技术的普及,数据安全和隐私问题也变得愈发重要。本文将探讨自动驾驶中的数据收集、数据隐私和安全挑战,以及如何保护自动驾驶系统的数据。
自动驾驶中的数据收集
在自动驾驶技术中…
10月16日,每日信息差
今天是2023年10月16日,以下是为您准备的14条信息差
第一、上海发布生物医药产业重磅政策,合成生物、基因治疗、医疗机器人三大前沿赛道行动方案出炉
第二、蔚来汽车申请“蔚来杨戬”商标。蔚来首颗自研芯片10月量产,型号为NX6031࿰…
![2023年中国自动驾驶卡车市场发展趋势分析:自动驾驶渗透率快速增长[图]](https://img-blog.csdnimg.cn/img_convert/b1b8d74fd50767137ec25f0bb432a849.png)
2023年中国自动驾驶卡车市场发展趋势分析:自动驾驶渗透率快速增长[图]
自动驾驶卡车的技术原理是通过电脑算法控制车辆行驶,辅助驾驶员完成任务。其实现方式主要是基于传感器和计算处理技术。自动驾驶卡车可以随时感知周围环境,灵活避障,自适应调整行驶路径,相比之下传统卡车需要驾驶员进行手动操作&a…
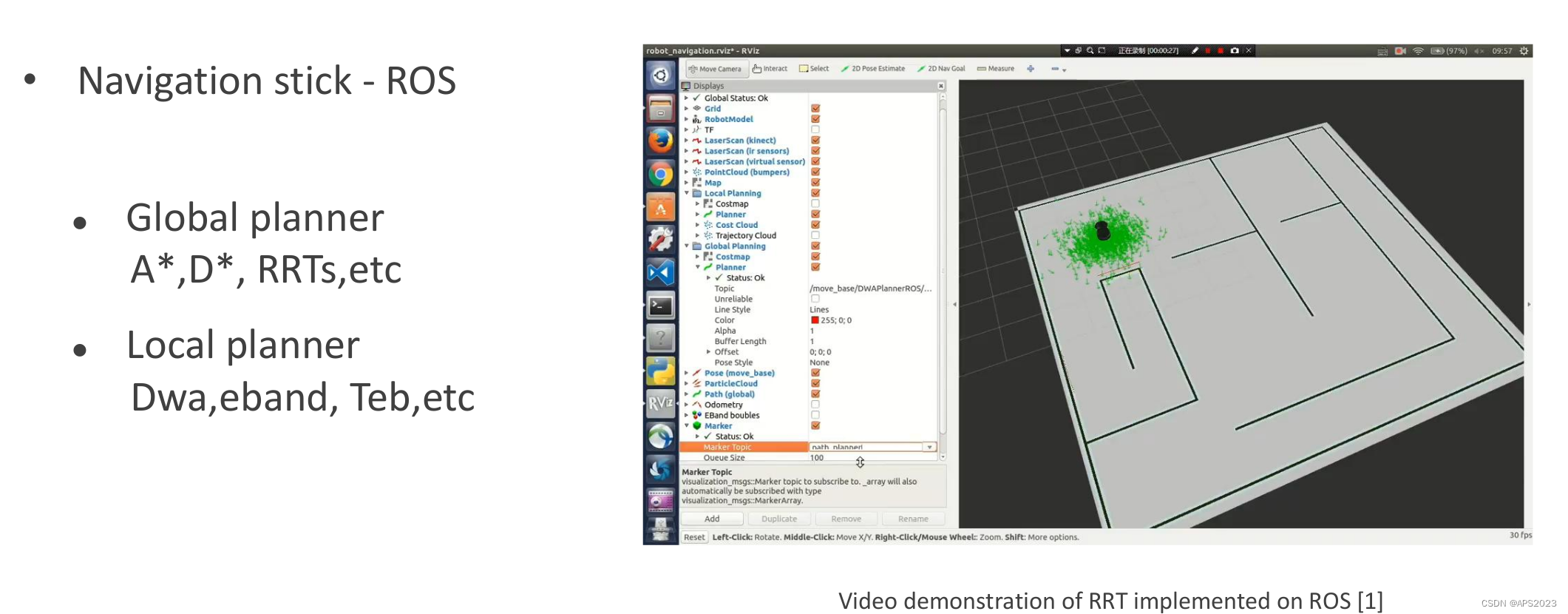
移动机器人路径规划(三)--- 基于采样的路径规划Sample-basedpath finding
目录 1 基于采样的路径规划的优点和一些重要概念
2 概率路图 Probabilistic Road Map
3 快速搜索随机树Rapidly-exploring Random Tree
3.1 RRT
3.2 RRT Connect
4 RRT算法的优化
4.1 RRT*
4.2 Kinodynamic-RRT*
4.3 Anytime-RRT*
5 Advanced Sampling-based Methods…
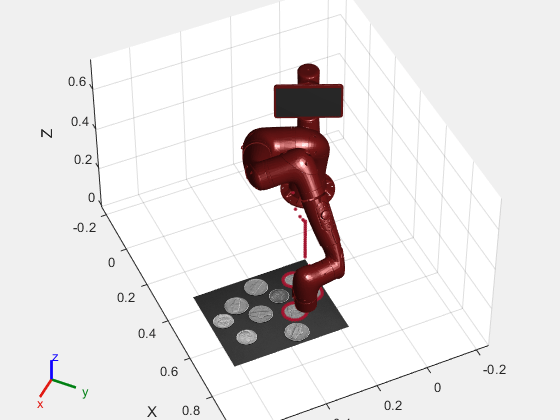
MATLAB 机械臂逆运动学进行轨迹控制建模
系列文章目录 文章目录 系列文章目录前言一、模型概览1.1 Target Pose Generation 目标姿势生成1.2 Inverse Kinematics 逆运动学1.3 Manipulator Dynamics 机械手动力学1.4 Pose Measurement 姿势测量 二、机械手定义三、生成航点四、模型设置五、模拟机械手运动六、将结果可视…
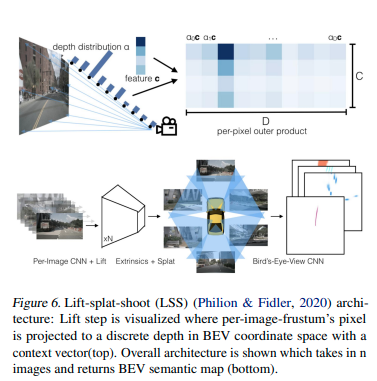
经典文献阅读之--Surround-View Survey(自动驾驶中基于环视视觉的3D检测综述)
0. 简介
对于基于环视视觉的3D检测而言,目前已经有很多文章了。因为基于视觉的3D检测任务是自动驾驶系统感知的基本任务,然而,使用单目相机的2D传感器输入数据来实现相当好的3D BEV(鸟瞰图)性能不是一项容易的任务。这…
10.27 校招 实习 内推 面经
绿*泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、校招&实习|迦智科技 2024届秋季校园招聘正式启动
校招&实习|迦智科技 2024届秋季校园招聘正式启动 2、校招 | 粤港澳大湾区国家技术创新中心2024校园招聘正…
11月1日,每日信息差
今天是2023年11月01日,以下是为您准备的19条信息差
第一、国家安全部称「发现数百个非法涉外气象探测站,实时向境外传输数据」
第二、安踏宣布更改公司标志
第三、重大突破「科学家找到癌细胞的生死开关」,此研究将对癌症病人治疗产生什么…
【MISRA C 2012】Rule 2.6 函数不应该包含未使用的标签声明
1. 规则1.1 原文1.2 分类 2. 关键描述3. 代码实例 1. 规则
1.1 原文
Rule 2.6 A function should not contain unused label declarations Category Advisory Analysis Decidable, Single Translation Unit Applies to C90, C99
1.2 分类
规则2.6:函数不应该包含…
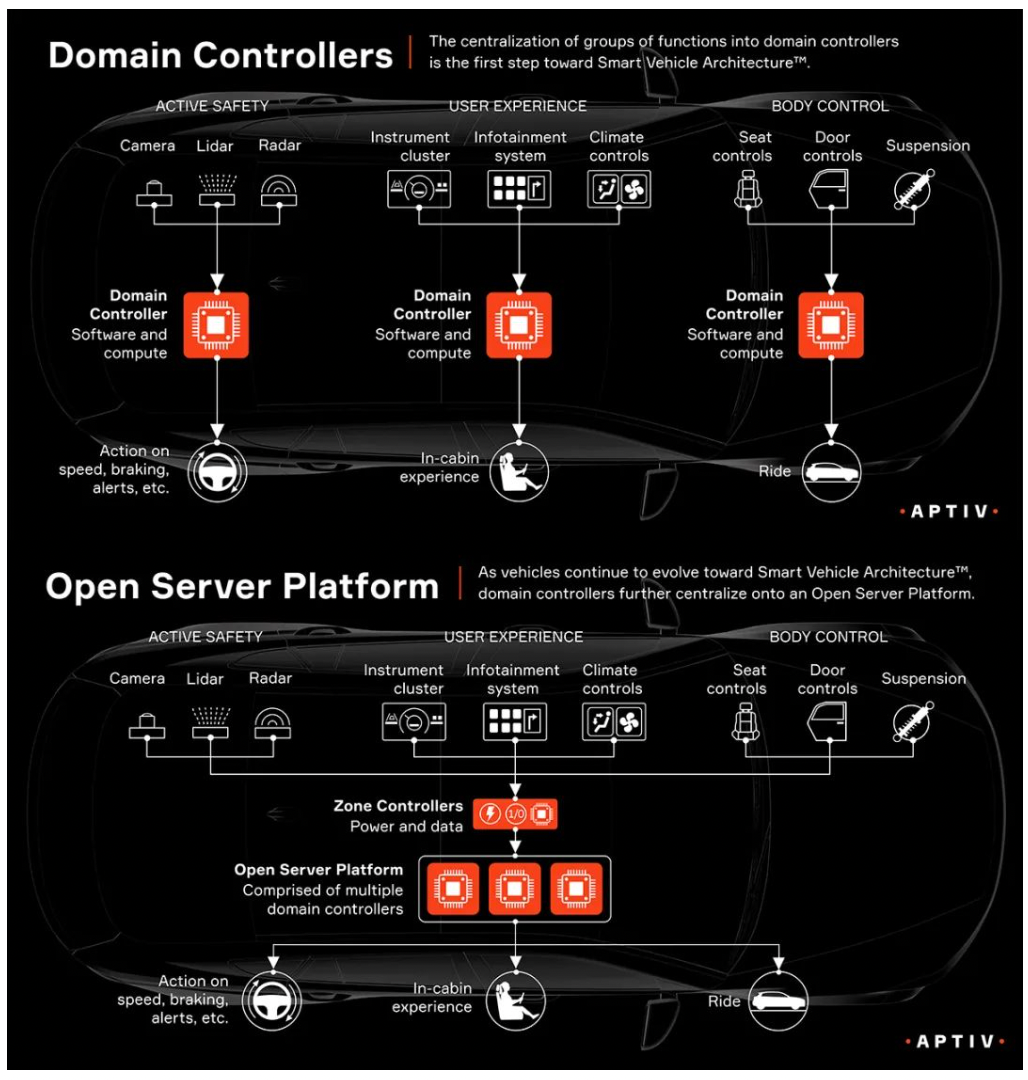
独家数据!搭载率逼近30%!智能网联从「偏科」到「全能」战役打响
从早期的智能座舱(斑马、比亚迪DiLink),到后来的智能驾驶(理想、小鹏的NOA),再到今年刮起的中央计算、驾舱一体风潮,汽车智能化正在从偏科走向全域智能化的关键周期。 本周,高工智能…
使用 Python、XML 和 YAML 编写 ROS 2 Launch 文件
系列文章目录 文章目录 系列文章目录前言一、Launch 文件示例1.1 Python 版本1.2 XML 版本1.3 YAML 版本 二、从命令行使用 Launch 文件1. Launching2. 设置参数3. 控制海龟 三、Python、XML 或 YAML: 我应该使用哪种语言?如果觉得内容不错,请…
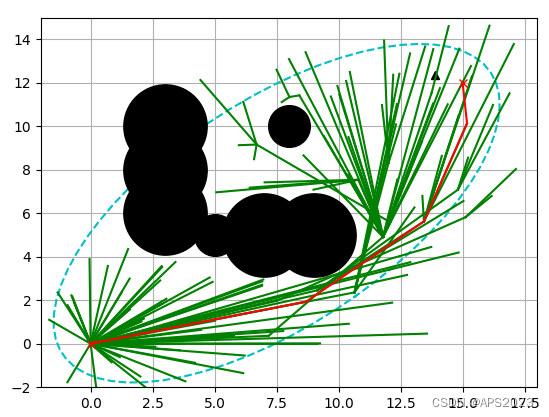
自动驾驶算法(五):Informed RRT*算法讲解与代码实现(基于采样的路径规划) 与比较
目录 1 RRT*与Informed RRT*
2 Informed RRT*代码解析
3 完整代码
4 算法比较 1 RRT*与Informed RRT* 上篇博客我们介绍了RRT*算法:我们在找到一个路径以后我们还会反复的搜索。 Informed RRT*算法提出的动机(motivation)是能否增加渐近最优的速度呢?…

大疆Livox MID-360安装ROS1/2驱动 Ubuntu20.04
文章目录 一、接线连接二、安装上位机可视化工具三、安装ROS驱动3.1 配置静态IP3.2 安装Livox SDK23.3 安装ROS驱动3.4 驱动 本文介绍如何在Ubuntu20.04中安装大疆Livox MID-360的ROS1/2驱动
一、接线连接
livox航插一分三线,其中航空母头连接激光雷达,…

【论文精读】PlanT: Explainable Planning Transformers via Object-Level Representations
1 基本信息
院校:德国的图宾根大学 网站:https://www.katrinrenz.de/plant
2 论文背景
2.1 现有问题
现在的基于学习的方法使用高精地图和BEV,认为准确的(达到像素级的pixel-level)场景理解是鲁棒的输出的关键。re…
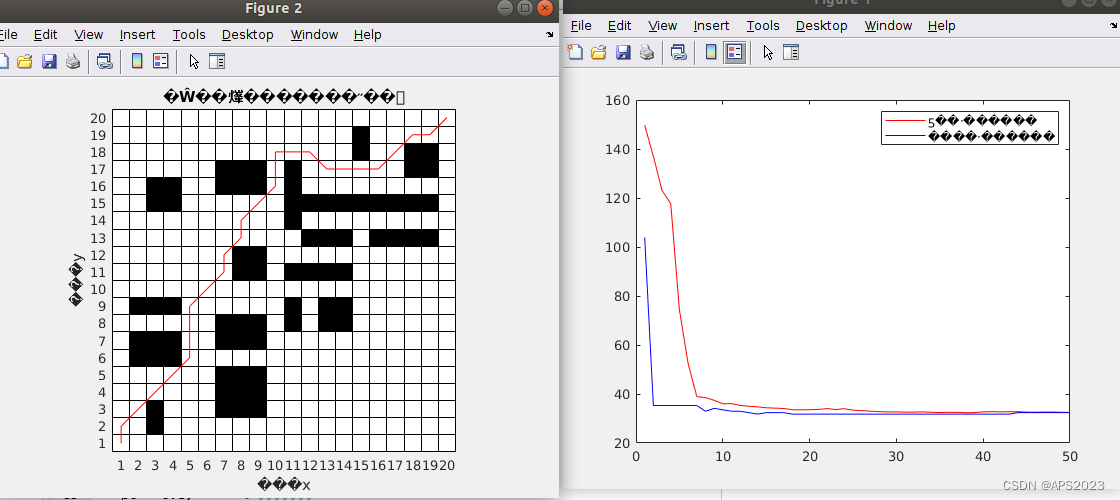
自动驾驶算法(五):基于遗传算法的路径规划(上)
目录
1 遗传算法介绍
2 遗传算法代码详解--绘制地图与种群初始化代码讲解 1 遗传算法介绍 模拟生物进化过程,物竞天择,适者生存。 我们先为栅格地图进行编码:从起点0出发到终点24这个栅格。我们首先有一条路径(0,6&a…
第三章:人工智能深度学习教程-人工智能与机器学习与深度学习之间的区别
人工智能基本上是通过一组规则(算法)将人类智能融入机器的机制。人工智能是两个词的组合:“人工”是指由人类或非自然物体制造的东西,“智能”是指相应地理解或思考的能力。另一个定义可能是“人工智能基本上是训练机器࿰…
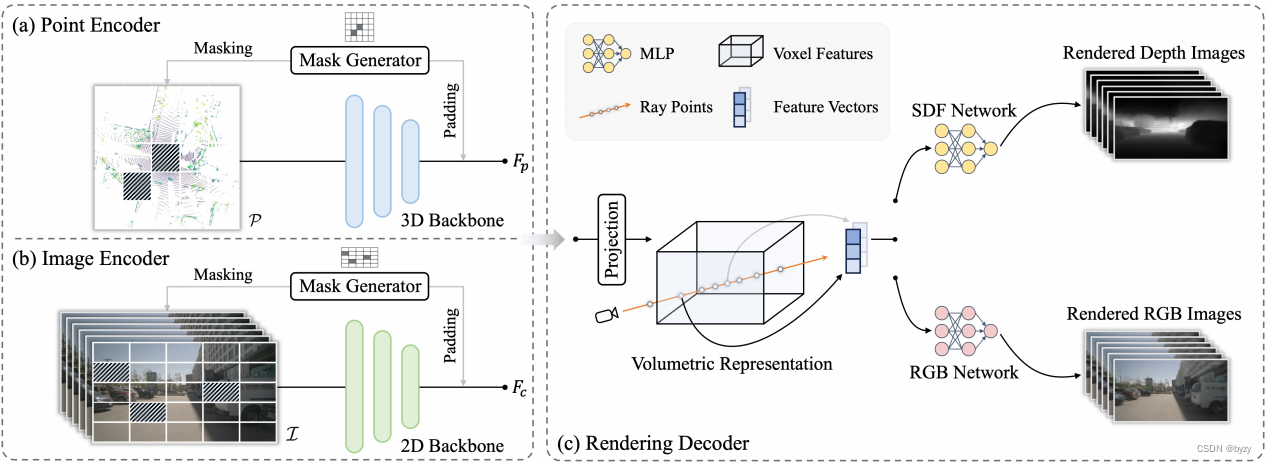
【论文笔记】UniPAD: A Universal Pre-training Paradigm for Autonomous Driving
原文链接:https://arxiv.org/pdf/2310.08370.pdf
1. 引言
过去的3D场景理解预训练方法多采用2D图像领域中的想法,可大致分为基于对比的方法和基于MAE的方法。
基于对比的方法通过对比损失,在特征空间中将相似的3D点拉进而将不相似的点分开…
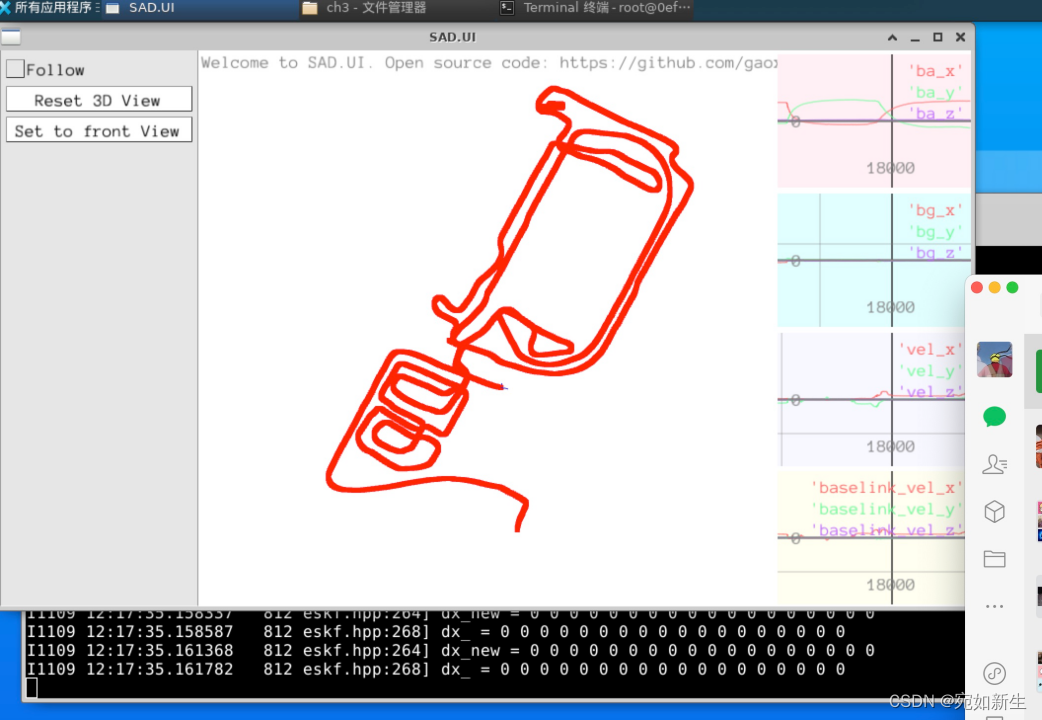
2.【自动驾驶与机器人中的SLAM技术】左乘模型推导ESKF
目录
1. 证明题
证明:若某个高斯随机变量为零均值,协方差为对角线矩阵且大小相同(各向同性),那么在乘任意旋转矩阵以后,其均值仍为零,且协方差不变;
2. 代码实现运动方程将F矩阵…

Talk | 马里兰大学博士生吴曦旸:分布式多智能体强化学习在复杂交通轨迹规划中的应用
本期为TechBeat人工智能社区第545期线上Talk! 北京时间11月09日(周四)20:00,马里兰大学博士生—吴曦旸的Talk已准时在TechBeat人工智能社区开播! 他与大家分享的主题是: “分布式多智能体强化学习在复杂交通轨迹规划中的应用”,介…

VINS-Mono-后端优化 (三:视觉雅可比推导)
用逆深度是因为这样可以在优化中从优化3个变量降低到1个,降低优化的维度加快求解速度 用逆深度是因为当距离很远的时候, 1 x \frac{1}{x} x1 x x x 就会无穷大,而3D点很近的情况也一般不会有,这也是为了数值稳定性
用逆深度的…
Roll:翻滚 Pitch:俯仰 Yaw:偏航
Roll:翻滚 Pitch:俯仰 Yaw:偏航
有时候不知道它到底绕着哪个轴旋转得到的角,一个比较容易的记法是根据字母的排列顺序PRY分别对应XYZ轴进行旋转得到的角,即:
Pitch是绕着X轴进行旋转得到的。Roll是绕着Y轴旋转得到的。Yaw是绕着Z轴旋…
11.4 校招 实习 内推 面经
绿*泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、2024校招总结~有~奖~征~文
2024校招总结有奖征文 2、校招|理想汽车2024校园招聘,最新岗位盘点(内推&…

抢占全球30%碳化硅市场份额!英飞凌押注低碳化和数字化“新时代”
“未来十年将是低碳化和数字化‘双轮驱动’发展的时代。” 英飞凌科技全球高级副总裁及大中华区总裁、英飞凌科技大中华区电源与传感系统事业部负责人潘大伟在英飞凌2023年大中华区生态创新峰会上表示。
当前,“数字化低碳化”新趋势正在席卷和重塑着未来世界的千行…
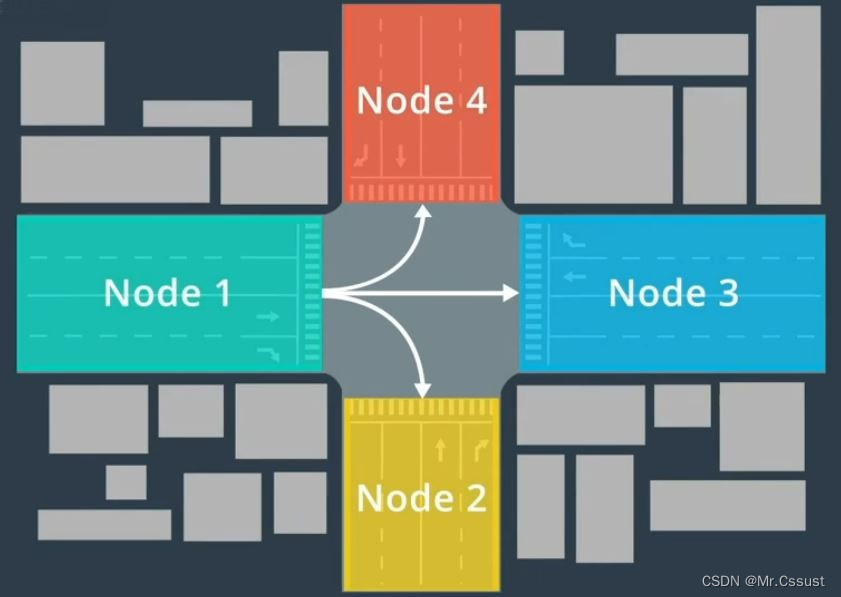
自动驾驶学习笔记(八)——路线规划
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往:
《自动驾驶新人之旅》免费课程—> 传送门
《Apollo Beta宣讲和线下沙龙》免费报名—>传送门 文章目录
前言
路线规划
路由元素
路径搜索
最优…
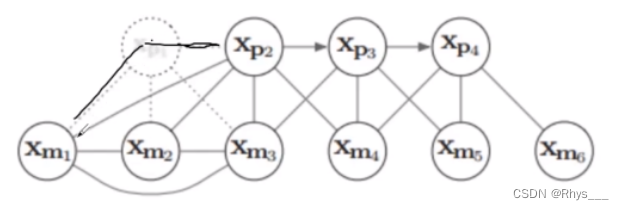
VINS-Mono-后端优化 (四:边缘化原理)
滑窗中固定只能有11帧,当来了新的帧的时候旧的帧就需要抹掉,但是不能直接把旧的帧的全部信息抹掉,因为旧的帧的经历过11次优化,其地图点中的优化信息是有用,边缘化的操作就是为了只把最旧帧的变量去掉,但是…

ASAM OpenDRIVE V1.7协议超详解(一)
文章目录 前言一、仿真场景的构成二、openDRIVE框架三、g_additionalData四、openDRIVE-header五、openDRIVE-road1、Road总拓扑结构2、Road-link介绍1)link的拓扑结构2)link链接示例3)link前继后继4)道路link规则 3、road-type介…
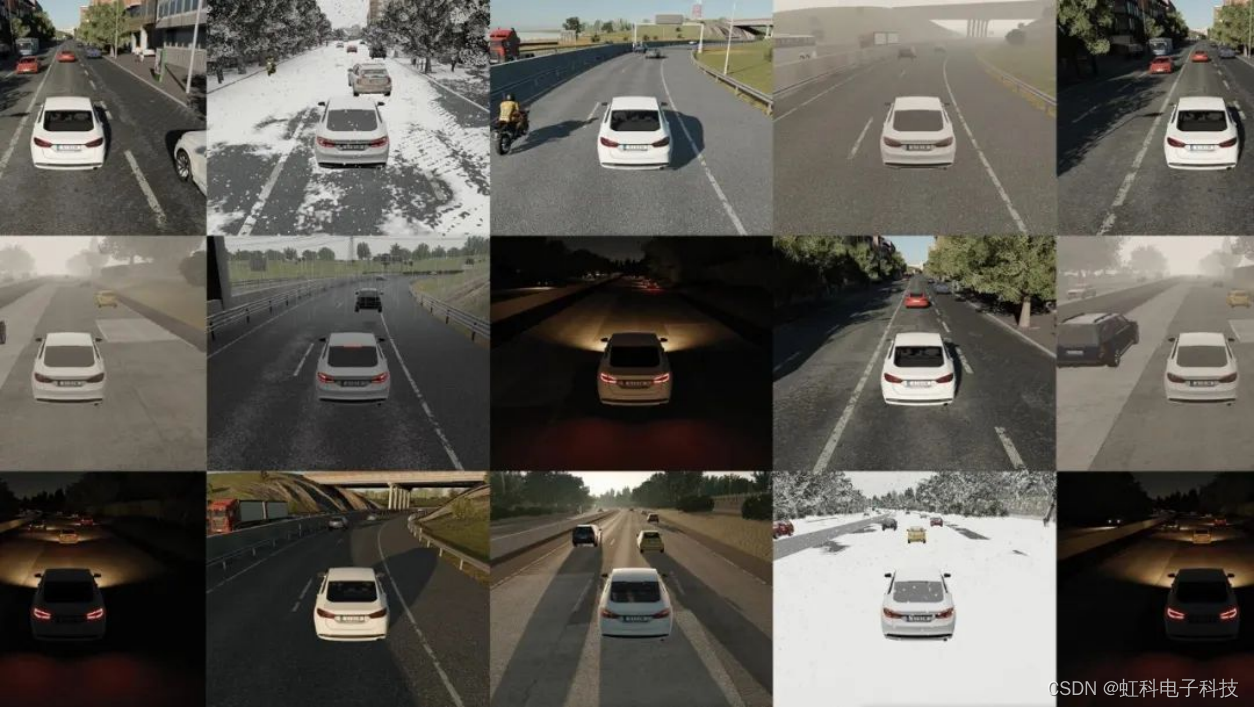
虹科方案 | 从概念到生产的自动驾驶软件在环(SiL)测试解决方案
来源:雅名特自动驾驶 虹科方案 | 从概念到生产的自动驾驶软件在环(SiL)测试解决方案 自动驾驶软件在环(SiL)测试解决方案
自动驾驶软件在环(SiL)测试解决方案能够研究和验证高历程实验和恶劣驾…

全系降3万,一把干到底,极越「智取」特斯拉
作者|德新
编辑|王博 11月30日,极越01官宣全系降价3万。
这意味着21.99万起步的极越01 Max,成为这个市场上入门门槛最低的带有城市智能驾驶辅助功能的车型。
要知道这是一台比Model Y大了一圈,全系配置了高阶智驾硬件,全系配高…
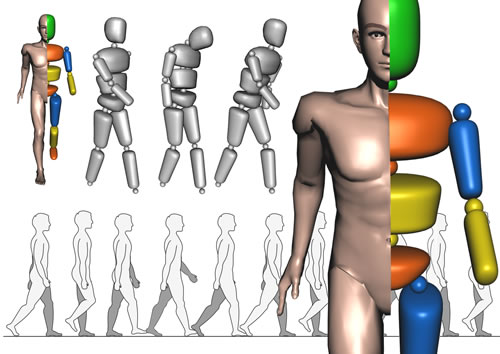
IEEE 机器人最优控制开源库 Model-based Optimization for Robotics
系列文章目录 文章目录 系列文章目录前言一、开源的库和工具箱1.1 ACADO1.2 CasADi1.3 Control Toolbox1.4 Crocoddyl1.5 Ipopt1.6 Manopt1.7 LexLS1.8 NLOpt1.9 qpOASES1.10 qpSWIFT1.11 Roboptim 二、其他库和工具箱2.1 MUSCOD2.2 OCPID-DAE12.3 SNOPT 前言
机器人ÿ…
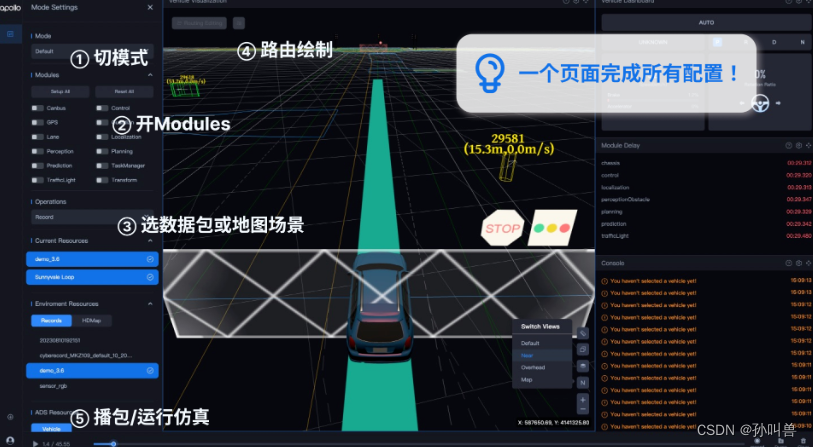
APOLLO自动驾驶技术沙龙:未来已来,共创智能交通新时代
在这次Apollo会议上,我深刻地感受到了人工智能自动驾驶技术领域的最新进展和未来趋势。作为一名从事软件开发工作的人员,我深感荣幸能够参加这次盛会。 前言 本次活动是百度Apollo社区工程师齐聚首钢Park,带来现场实操与技术分享。主要围绕Ap…
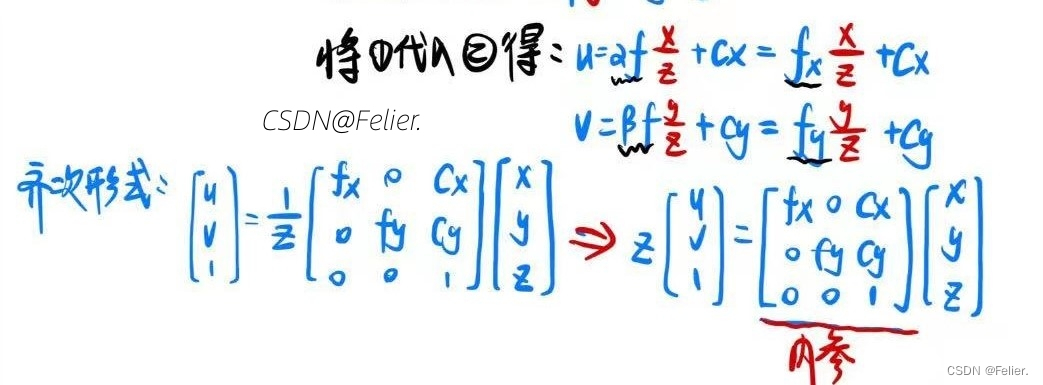
相机内参及其内参影响因素的几点思考
目录
理论推导之从相机坐标系到像素坐标系
机械参数对相机内参的影响
Resize与Crop对相机内参的影响
参考文献 理论推导之从相机坐标系到像素坐标系 相机内参的意义即从相机坐标系到像素坐标系的表达,其中共涉及到三个坐标系:相机坐标系、成像坐标系…
11.10 校招 实习 内推 面经
绿*泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、校招丨海康机器人2024校招3大类岗位补录(内推)
校招丨海康机器人2024校招3大类岗位补录(内推) 2、校招&实习 | 华为数据存储研究部招聘…
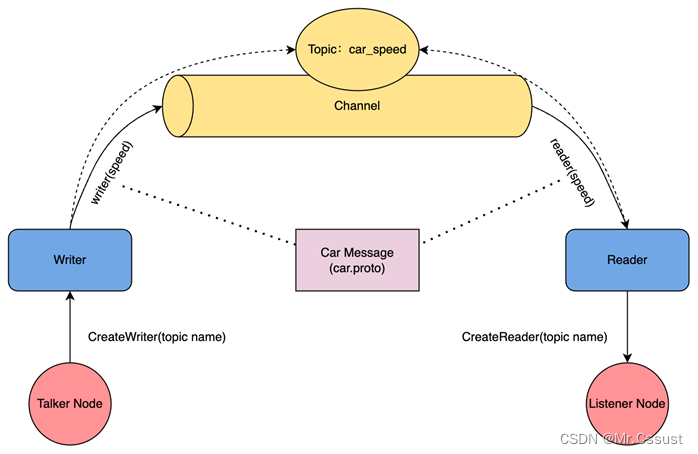
自动驾驶学习笔记(十)——Cyber通信
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往: 《自动驾驶新人之旅》免费课程—> 传送门
《Apollo Beta宣讲和线下沙龙》免费报名—>传送门 文章目录
前言
Cyber通信
编写代码
编译程序
运行…

控制原理 | PID控制的三个参数如何影响控制效果?(附参数整定方法)
目录 0 专栏介绍1 PID控制基本原理2 比例控制的作用3 积分控制的作用4 微分控制的作用5 参数整定方法5.1 经验法5.2 临界比例度法5.3 衰减曲线法 0 专栏介绍
🔥附C/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细介绍全局规…

【目标测距】雷达投影测距
文章目录 前言一、读取点云二、点云投影图片三、读取检测信息四、点云投影测距五、学习交流 前言
雷达点云投影相机。图片目标检测,通过检测框约束等等对目标赋予距离。计算消耗较大,适合离线验证操作。在线操作可以只投影雷达检测框。 一、读取点云 py…

人工智能的广泛应用与影响
目录 前言1 智能手机与个人助手2 医疗保健3 自动驾驶技术4 金融领域5 教育与学习6 智能家居与物联网7 娱乐与媒体8 环境保护结语 前言
人工智能(Artificial Intelligence,AI)是当今科技领域的璀璨明星,它不仅在技术创新方面掀起了…
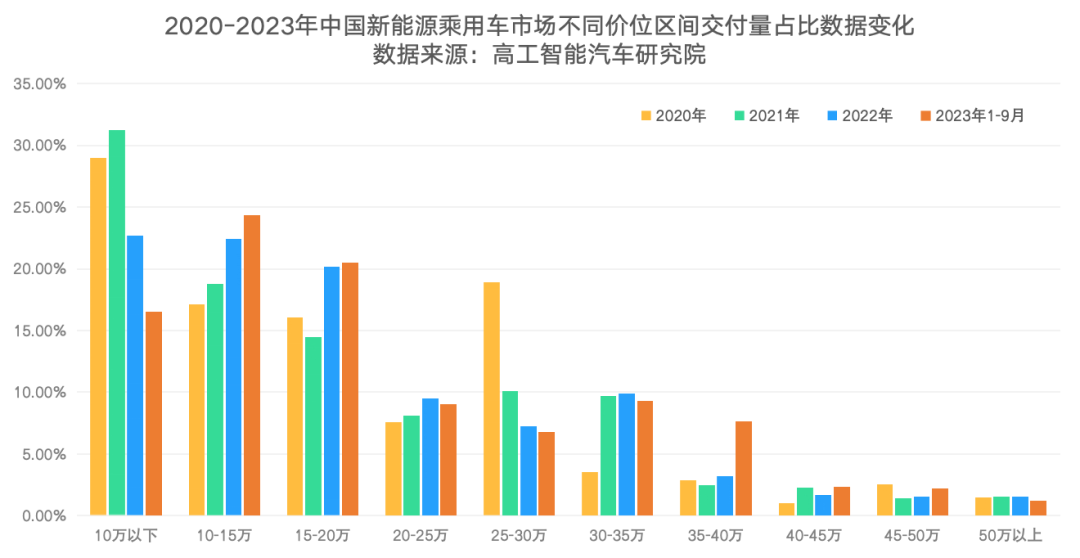
增速大幅下滑?基础L2博弈成本
在高阶智驾(从ALC到NOA)的光环之下,传统入门级基础L2级辅助驾驶赛道也在发生一些微妙的变化。 高工智能汽车研究院监测数据显示,2023年1-9月,基础L2在中国市场(不含进出口)乘用车前装标配交付45…
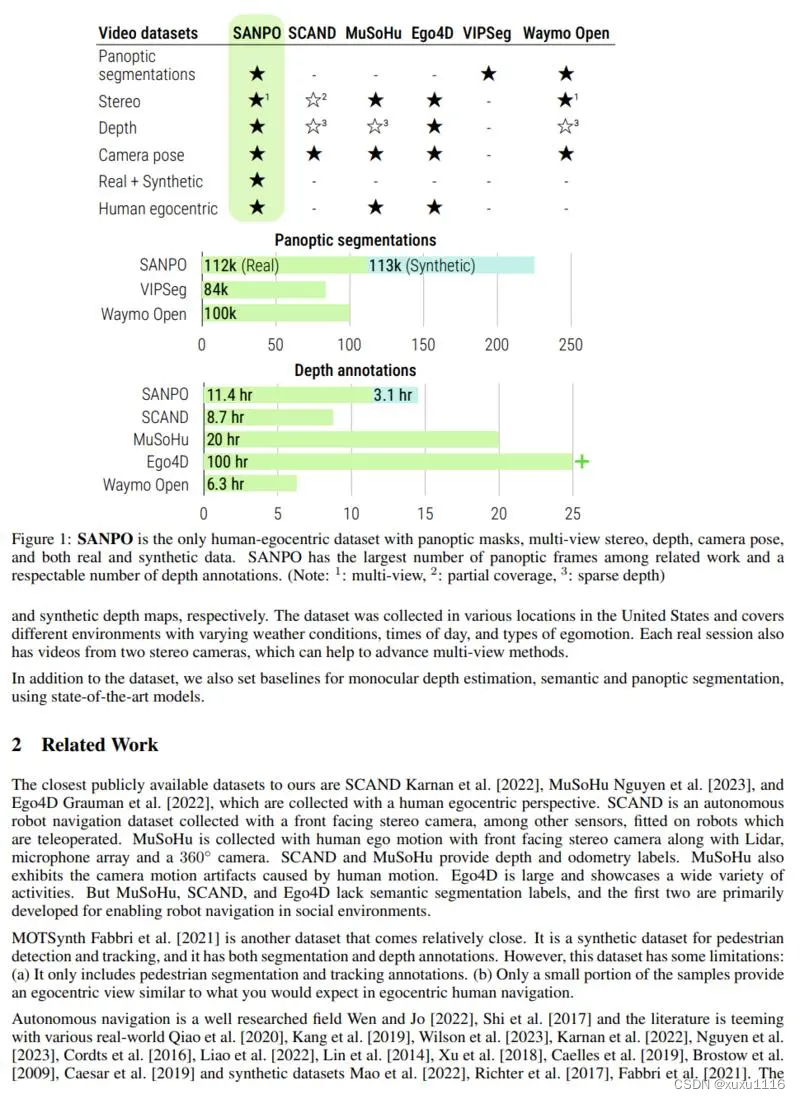
做自动驾驶的同学看过来:场景理解、辅助功能、导航、寻路、避障数据集
SANPO:第一个具有大规模密集全景分割和深度注释的人类以自我中心的视频数据集,有助于推动视频分割、深度估计、多任务视觉建模和合成到真实域适应任务发展,同时支持人类导航系统,
SANPO:一个大规模的以自我为中心的视…
【自动驾驶】一些业内自动驾驶专业术语释义
Trajectory
轨迹信息,一般都会发布未来5-10秒的trajactory信息。
Trajectory flicker
轨迹抖动
Nudge
道内避障。在维持车道不变的情况下,横向偏离车道中心以绕开obstacle/agent。
Xlane Nudge
借道避障。借用对向车道或自行车道以绕开obstacle/a…
跨越行业边界,CodeMeter护航AI领域安全与合规
在人工智能(AI)技术如ChatGPT的推动下,工业视觉、医疗诊断和智能驾驶等领域正在经历重大变革。这些技术不仅扩大了应用范围,也带来了数据安全、软件授权保护和合规性等新挑战。
AI工业视觉正在推动制造和自动化的快速发展&#x…

实现简单的操作服务器和客户端(上)
一、说明 描述:本教程介绍如何使用 simple_action_server 库创建斐波那契动作服务器。此示例操作服务器生成斐波那契序列,目标是序列的顺序,反馈是计算的序列,结果是最终序列。
内容 创建操作消息编写一个简单的服务器 代码
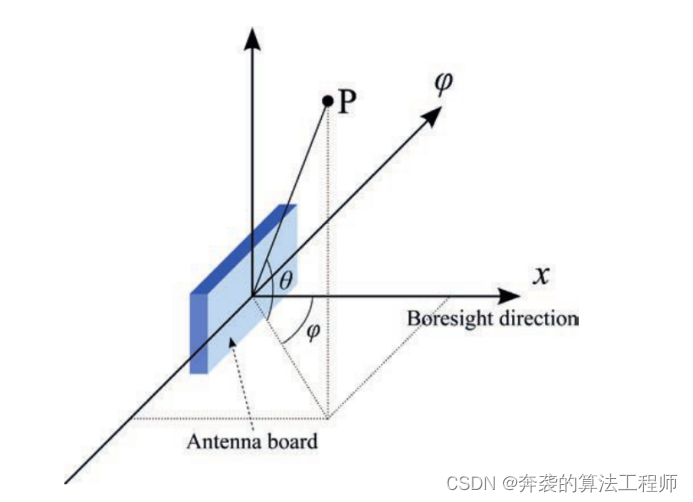
现代雷达车载应用——第2章 汽车雷达系统原理 2.1节
经典著作,值得一读,英文原版下载链接【免费】ModernRadarforAutomotiveApplications资源-CSDN文库。
2.1 基本雷达功能 雷达系统通过天线或天线阵列向空间辐射电磁能量。辐射的电磁能量“照亮”周围的目标。“被照亮”的目标拦截一些辐射能量࿰…
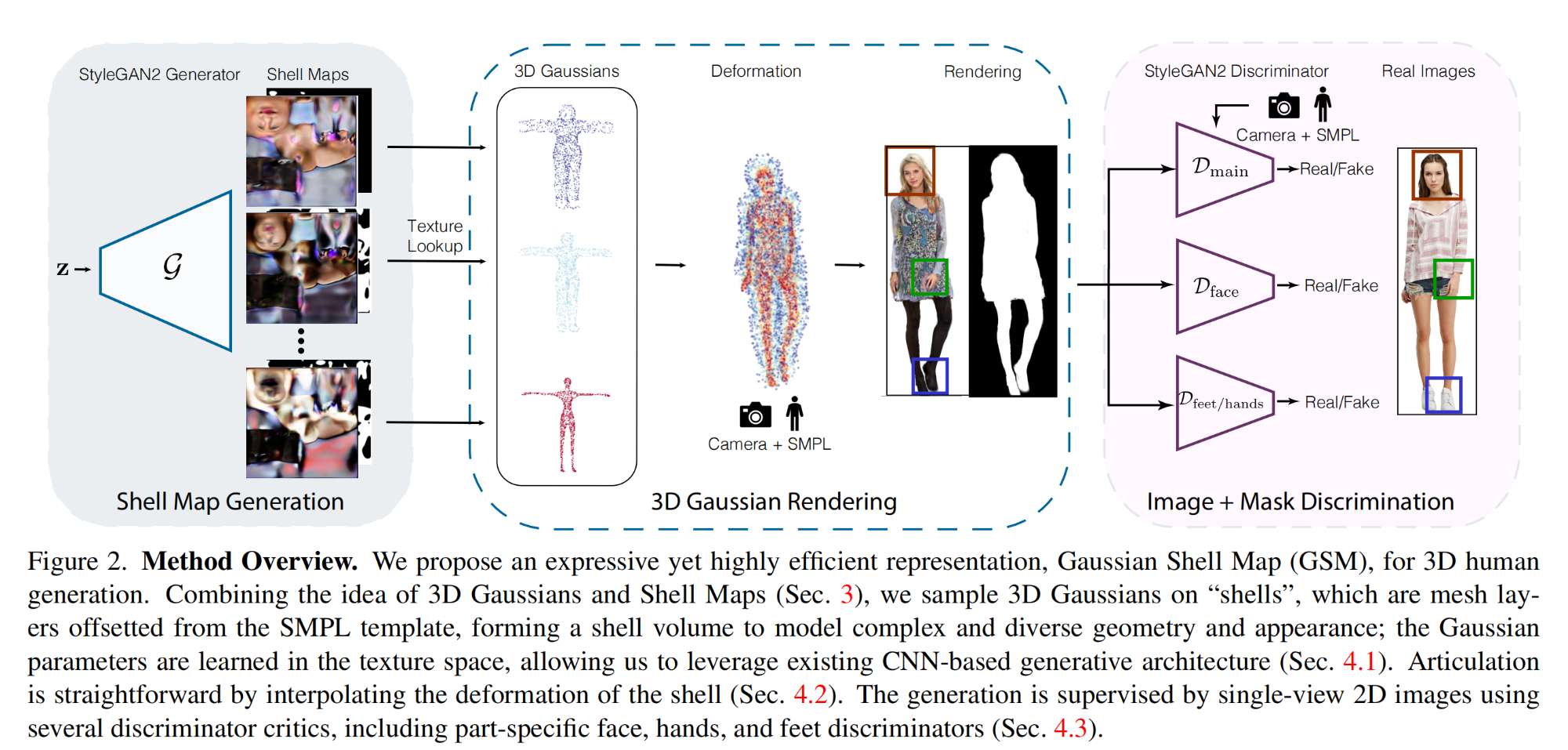
CV计算机视觉每日开源代码Paper with code速览-2023.12.1
点击CV计算机视觉,关注更多CV干货
论文已打包,点击进入—>下载界面
点击加入—>CV计算机视觉交流群
1.【基础网络架构:Transformer】TransNeXt: Robust Foveal Visual Perception for Vision Transformers 论文地址:http…

三. LiDAR和Camera融合的BEV感知算法-BEV-SAN
目录 前言0. 简述1. 算法动机&开创性思路2. 主体结构3. 损失函数4. 性能对比总结下载链接参考 前言 自动驾驶之心推出的《国内首个BVE感知全栈系列学习教程》,链接。记录下个人学习笔记,仅供自己参考。 本次课程我们来学习下课程第三章——LiDAR和Ca…
自动驾驶MCU软件架构说明
文档 变更历史 版本Version 状态 Status 内容 Contents 日期 Date 撰写 Editor 批准 Approver Term 编号 No. 术语和缩写 Terms & Abbreviation 解释 Explanation 引用文档 编号 No. 文档名称 Document Name 文档版本 Do…
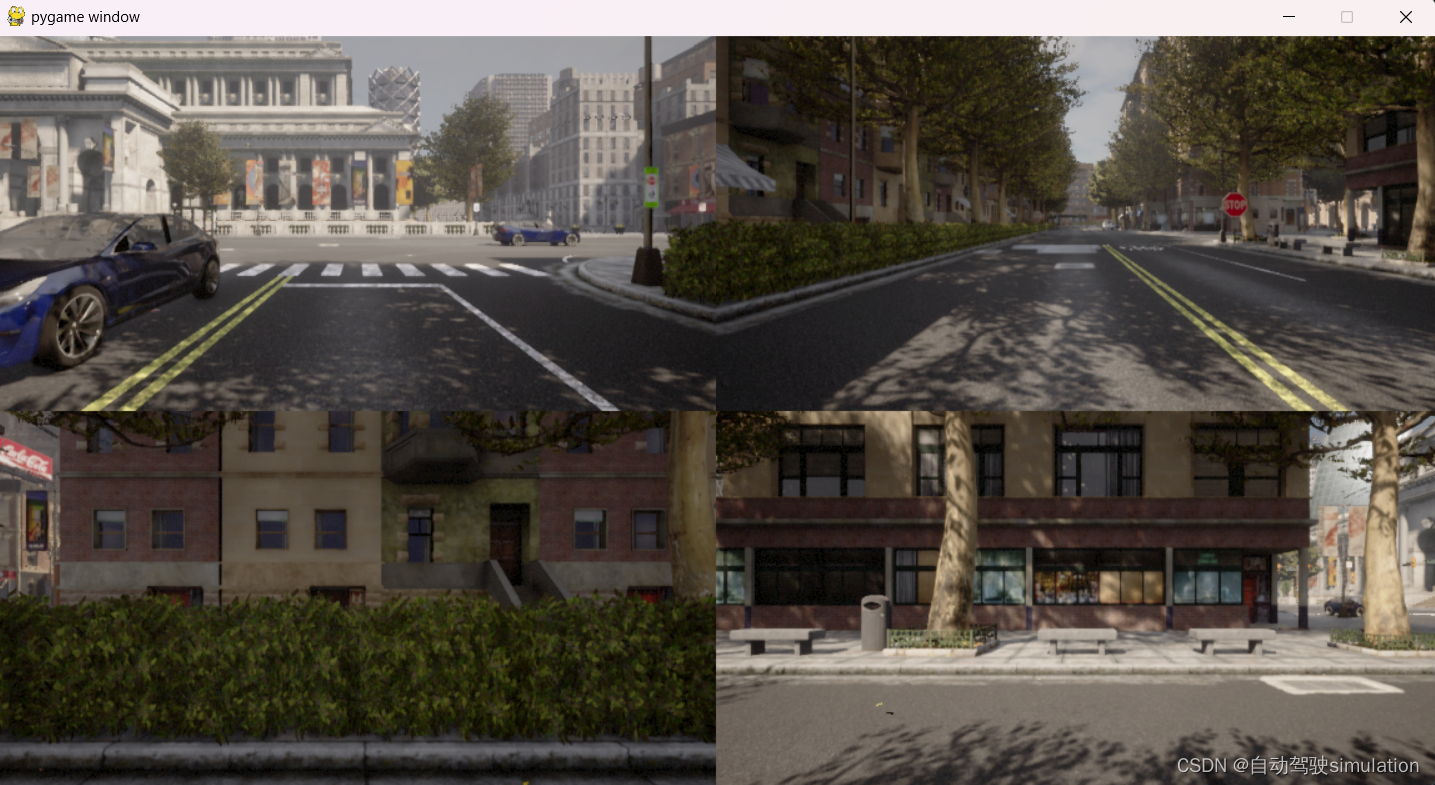
Carla自动驾驶仿真六:pygame多个车辆摄像头画面拼接
此文章主要介绍carla前后左右摄像头画面拼接到pygame上 文章目录 前言一、要点分析二、完整代码三、拼接效果四、总结 前言
1、使用carla做仿真测试或者开发时,如果能够将车辆周边的画面拼接并渲染,可以直观地查看周围地环境,便于调试。本文…
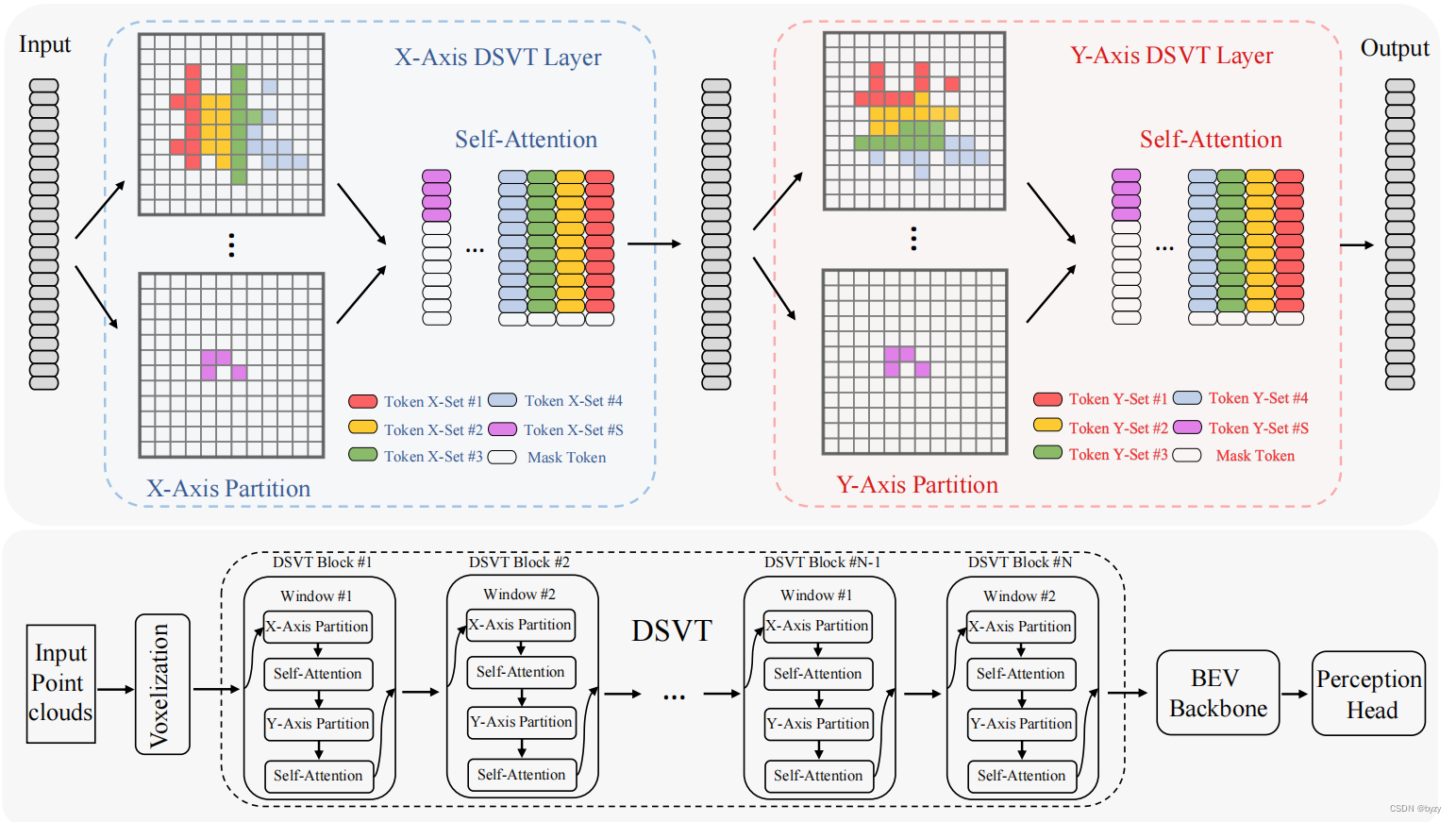
【论文笔记】DSVT: Dynamic Sparse Voxel Transformer with Rotated Sets
原文链接:https://arxiv.org/abs/2301.06051
1. 引言
本文提出DSVT,一种通用的、部署友好的、基于transformer的3D主干,可用于多种基于点云处理的3D感知任务中。
传统的稀疏点云特征提取方法,如PointNet系列和稀疏卷积…
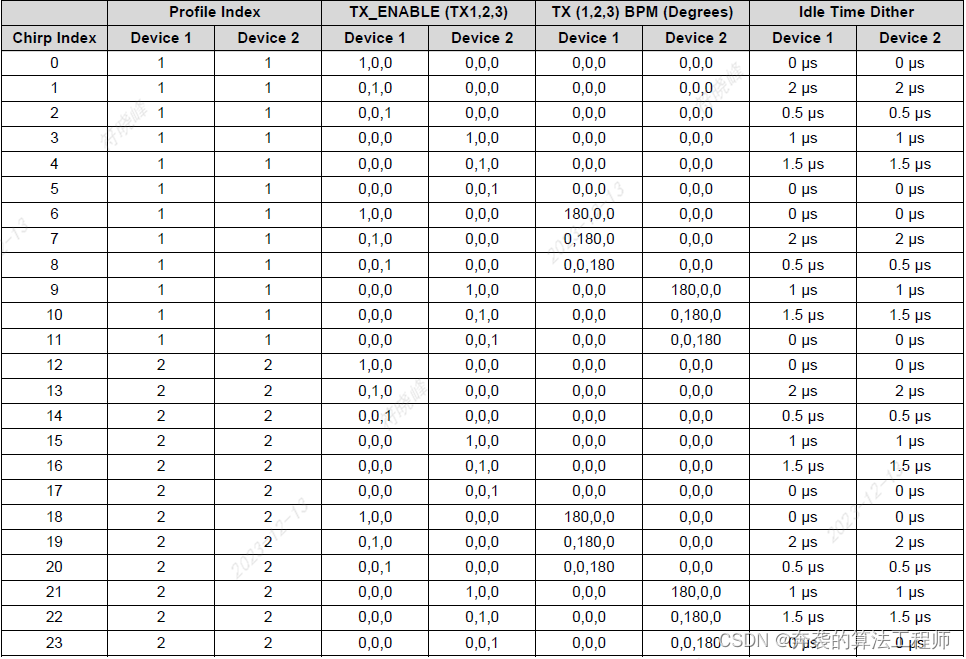
AWR2243级联(TI文档)
摘要 本应用报告描述了TI的级联毫米波雷达系统。该解决方案基于TI的AWR2243雷达芯片。使用20 GHz的本振输入和输出路径,这些芯片中的几个级联在一起并同步工作。每个AWR2243芯片最多支持4个接收天线和3个发射天线。级联多个这样的芯片允许雷达系统使用更多的接收和发…
车联网助力自动驾驶发展
单车智能决策难点 芯片,成为自动驾驶的最大瓶颈 自动驾驶对芯片算力要求极高。要求自动驾驶处理器在每秒能够处理数百万亿次的计算; 自动驾驶对计算的实时性要求极高。任何一点时延,都有可能造成车毁人亡; 对低能耗有极大的…

现代雷达车载应用——第2章 汽车雷达系统原理 2.3节 信号模型
经典著作,值得一读,英文原版下载链接【免费】ModernRadarforAutomotiveApplications资源-CSDN文库。
2.3 信号模型 雷达的发射机通常发出精心设计和定义明确的信号。然而,接收到的返回信号是多个分量的叠加,包括目标的反射、杂波…
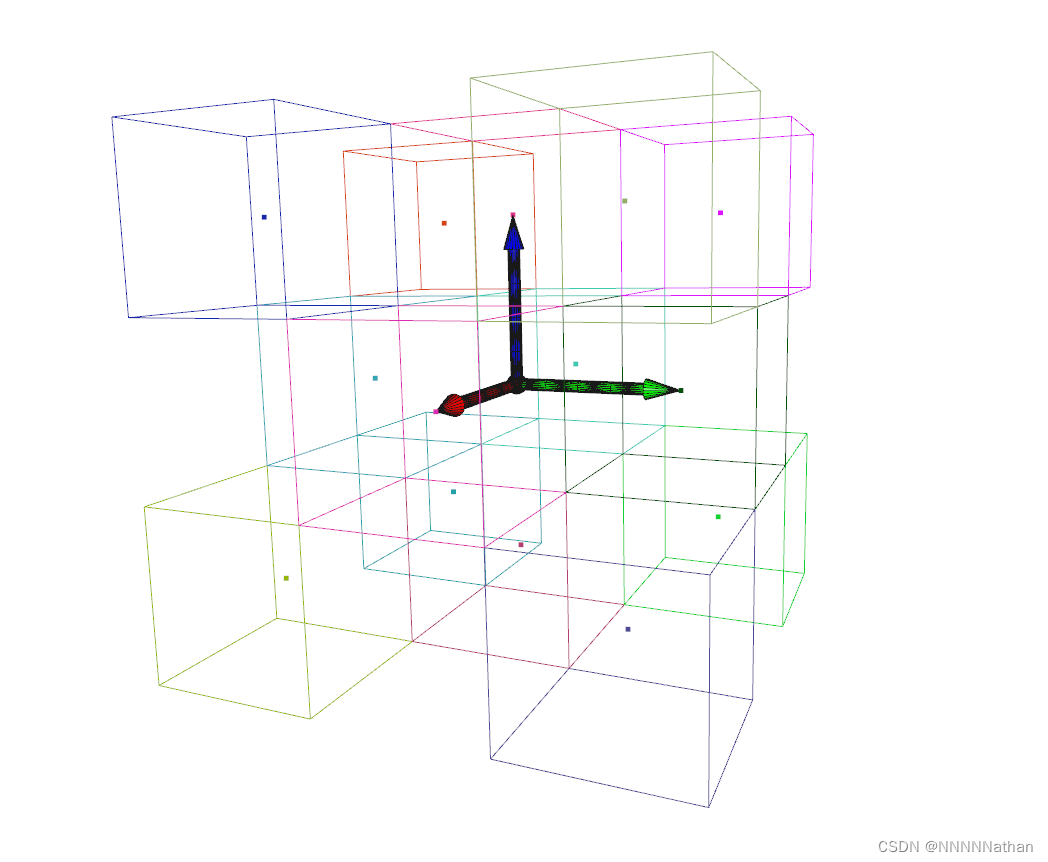
『OPEN3D』1.5.2 动手实现点云栅格/体素最近邻
本专栏地址:
https://blog.csdn.net/qq_41366026/category_12186023.html?spm=1001.2014.3001.5482 NEARBY6实现的voxel可视化 一种NEARBY14实现的可视化voxel

自动驾驶学习笔记(十九)——Planning模块
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往: 《自动驾驶新人之旅》免费课程—> 传送门
《Apollo 社区开发者圆桌会》免费报名—>传送门
文章目录
前言
Planning作用
Planning内容
Plannin…
高级驾驶辅助系统 (ADAS)介绍
随着汽车技术持续快速发展,推动更安全、更智能、更高效的驾驶体验一直是汽车创新的前沿。高级驾驶辅助系统( ADAS ) 是这场技术革命的关键参与者,是 指集成到现代车辆中的一组技术和功能,用于增强驾驶员安全、改善驾驶体验并协助完成各种驾驶任务。它使用传感器、摄像头、雷…
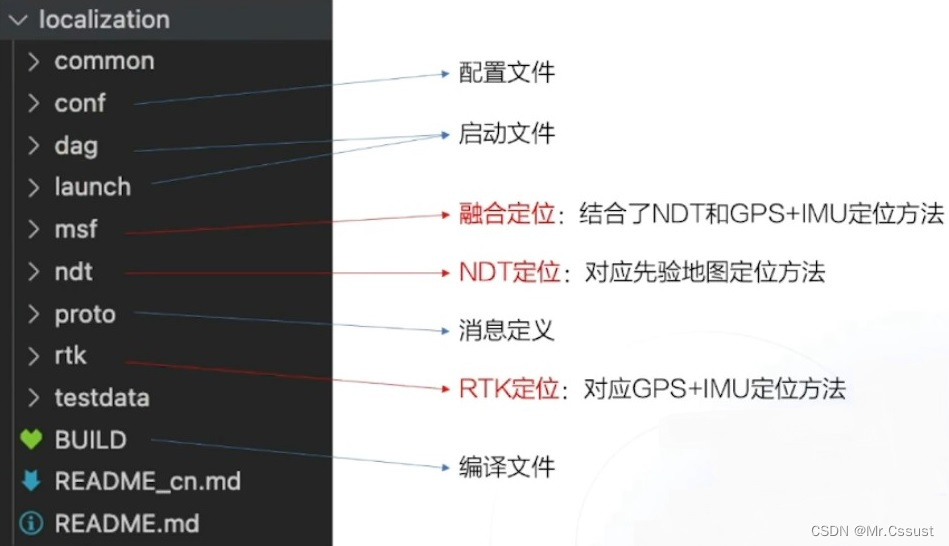
自动驾驶学习笔记(十二)——定位技术
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往: 《自动驾驶新人之旅》免费课程—> 传送门
《Apollo Beta宣讲和线下沙龙》免费报名—>传送门 文章目录
前言
卫星定位
RTK定位
IMU定位
GNSS定…
机器学习笔记 - 3D对象检测技术路线调研(未完)
一、3D对象检测简述 3D对象检测是计算机视觉中的一项任务,其目标是根据对象的形状、位置和方向在 3D 环境中识别和定位对象。它涉及检测物体的存在并实时确定它们在 3D 空间中的位置。这项任务对于自动驾驶汽车、机器人和增强现实等应用至关重要。
1、基本流程 给定…
自动驾驶HWP 功能规范
目 录
概述 1 目的 1范围 1术语及缩写 1设计与实验标准 1 设计标准 2设计标准执行优先顺序 2功能规范 Specification 4 功能描述 Functional Description 4 工作条件与应用范围 Application Scope 4道路交通 4天气与光线 4传感器方案及需求 5 驾驶员状态监控系统 5前视摄像…

机器人控制的开源优化库 Model-based Optimization for Robotics - Optimization Tools
系列文章目录 文章目录 系列文章目录前言一、开源的库和工具箱1.1 ACADO1.2 CasADi1.3 Control Toolbox1.4 Crocoddyl1.5 Ipopt1.6 Manopt1.7 LexLS1.8 NLOpt1.9 qpOASES1.10 qpSWIFT1.11 Roboptim 二、其他库和工具箱2.1 MUSCOD 前言
开源的库和工具箱 一、开源的库和工具箱 …

4D雷达目标检测跟踪算法设计
1.算法流程 4D雷达点云跟踪处理沿用3D毫米波雷达的处理流程,如下图: 从接收到点云开始,先对点云做标定、坐标转换、噪点剔除、动静分离,再分别对动态目标和静态目标做聚类,然后根据聚类结果做目标的特征分析和检测等&a…
机器人最优控制开源库 Model-based Optimization for Robotics
系列文章目录 文章目录 系列文章目录前言一、开源的库和工具箱1.1 ACADO1.2 CasADi1.3 Control Toolbox1.4 Crocoddyl1.5 Ipopt1.6 Manopt1.7 LexLS1.8 NLOpt1.9 qpOASES1.10 qpSWIFT1.11 Roboptim 二、其他库和工具箱2.1 MUSCOD2.2 OCPID-DAE12.3 SNOPT 前言
机器人ÿ…
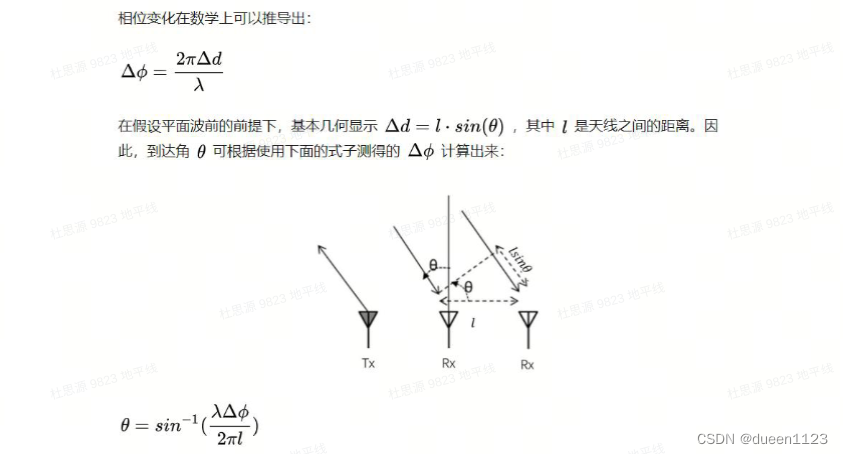
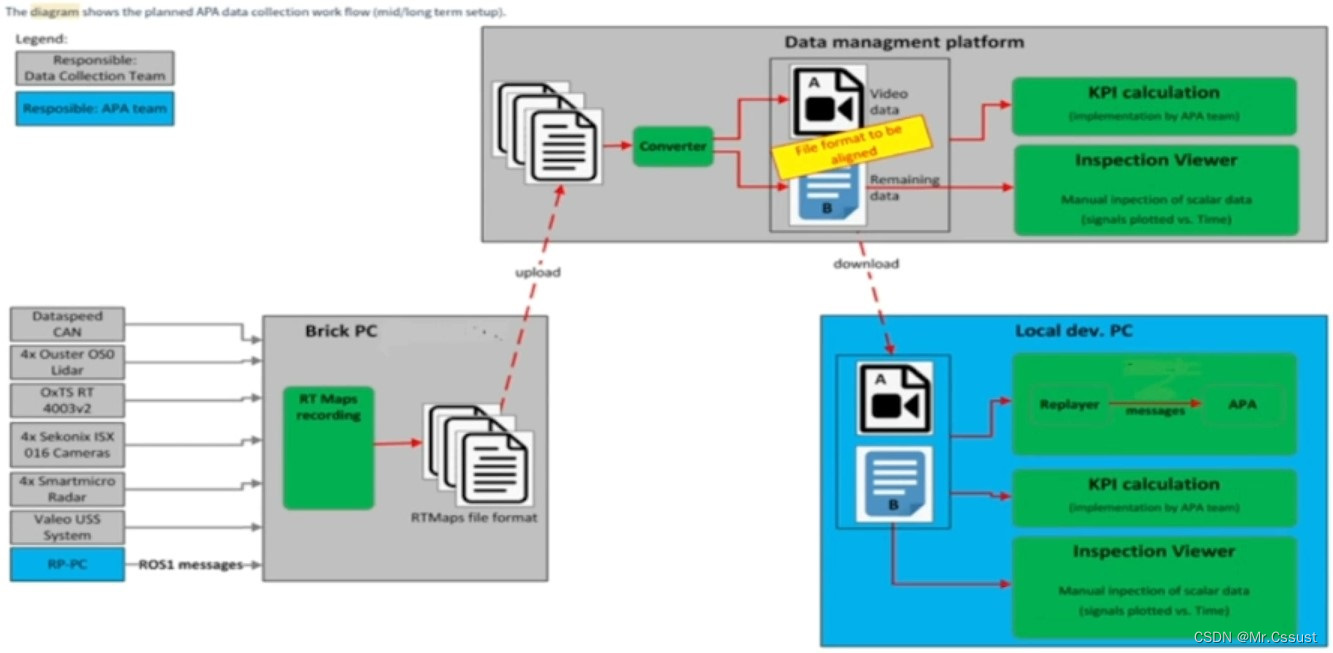
自动驾驶学习笔记(二十二)——自动泊车算法
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往: 《自动驾驶新人之旅》免费课程—> 传送门
《Apollo开放平台9.0专项技术公开课》免费报名—>传送门
文章目录
前言
感知算法
定位算法
规划算法…
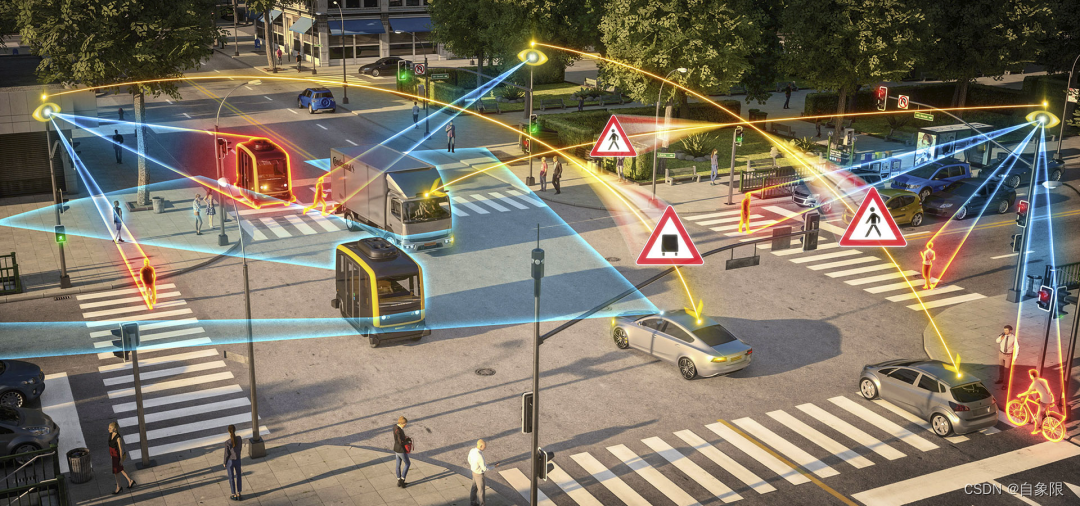
中国首个车路云一体化研究中心成立,将如何改变自动驾驶?
图片|electronicsmedia.info
©⾃象限原创
作者丨钱诚
编辑丨程心
自动驾驶正在迎来一场新的变局。
只是这一次,搅动整个产业的,是各种政策的密集落地。
2023年10月,工信部提出要开展城市级“车路云一体化”示范&#x…
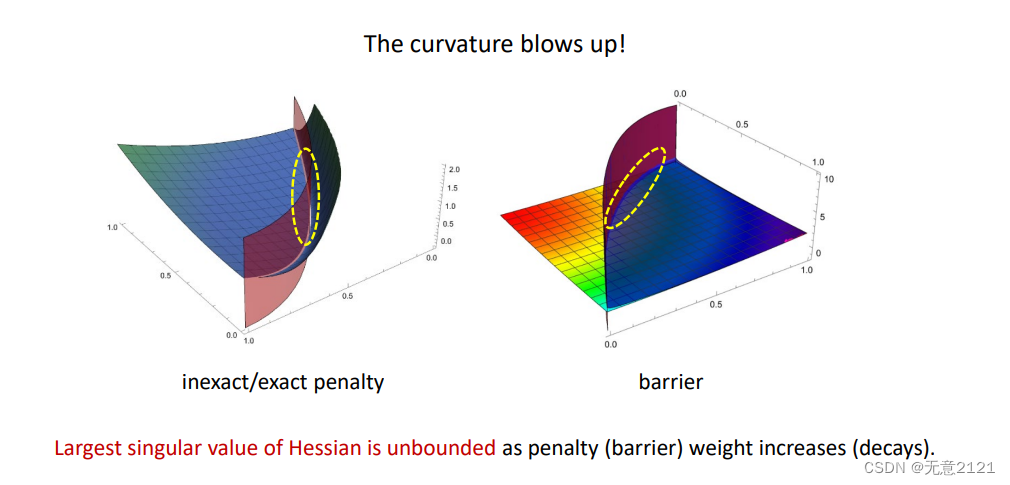
机器人中的数值优化之罚函数法
欢迎大家关注我的B站:
偷吃薯片的Zheng同学的个人空间-偷吃薯片的Zheng同学个人主页-哔哩哔哩视频 (bilibili.com)
本文ppt来自深蓝学院《机器人中的数值优化》
目录
1 L2-Penalty Method
1.1等式约束
1.2不等式约束
2 L1-Penalty Method
3 Barrier Method …
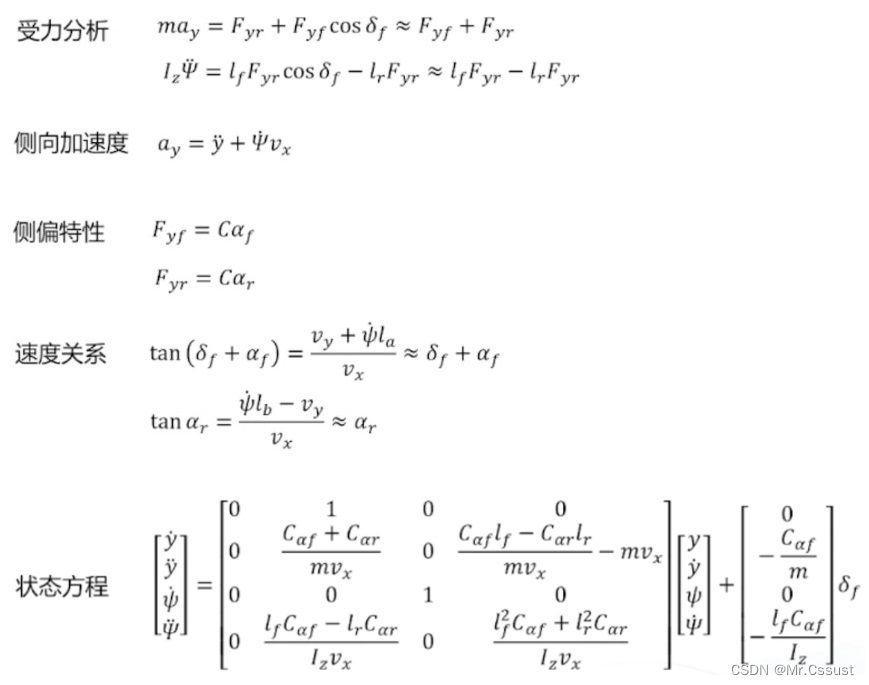
自动驾驶学习笔记(二十三)——车辆控制模型
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往: 《自动驾驶新人之旅》免费课程—> 传送门
《Apollo开放平台9.0专项技术公开课》免费报名—>传送门
文章目录
前言
运动学模型
动力学模型
总结…

Apollo自动驾驶:改变交通运输的游戏规则
前言 「作者主页」:雪碧有白泡泡 「个人网站」:雪碧的个人网站
ChatGPT体验地址 文章目录 前言1. Apollo缓存层2. 本地状态管理库3. 离线同步和冲突解决4. 离线数据同步和离线优先策略结论 📲🔌 构建离线应用:Apollo…
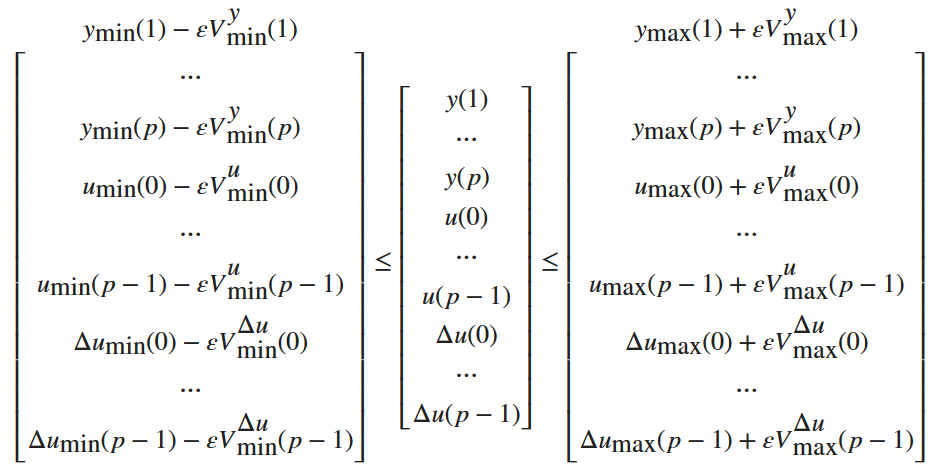
MATLAB - MPC - 优化问题(Optimization Problem)
系列文章目录 前言
模型预测控制可在每个控制间隔内解决一个优化问题,具体来说就是二次规划(QP)。求解结果决定了被控对象在下一个控制间隔之前使用的操纵变量(MV)。
该 QP 问题具有以下特点:
目标或 "成本 "函数 - …

理想L9自动驾驶域控制器拆解
理想L9自动驾驶域控制器拆解 目录 理想L9自动驾驶域控制器拆解简介:1、SOC-Orin2、MCU-TC3973、交换机4、GMSL解串芯片5、存储 printf("欢迎关注公众号:车载嵌入式探索者,博主建立了一个车规级开发交流群,
感兴趣的朋友可以关…
roscpp、rospy 用法汇总和代码实战
文章目录 1. 话题发布(Publisher)和订阅(Subscriber)Python (rospy)C (roscpp) 2. 服务(Service)Python (rospy)C (roscpp) 3. 参数设置/获取(Parameter Server)Python (rospy)C (ro…
【MISRA C 2012】Rule 4.2 不应该使用三连符
1. 规则1.1 原文1.2 分类 2. 关键描述3. 代码实例 1. 规则
1.1 原文
Rule 4.2 Trigraphs should not be used Category Advisory Analysis Decidable, Single Translation Unit Applies to C90, C99
1.2 分类
规则4.2:不应该使用三连符 Advisory建议类规范。
2…
SVD如何分解矩阵?
奇异值分解(Singular Value Decomposition,简称SVD)是一种将矩阵分解为三个矩阵乘积的方法,其用途广泛,包括矩阵压缩、降维、最小二乘问题等。下面我将详细解释SVD分解矩阵 A的过程,并提供一个简单的例子。…
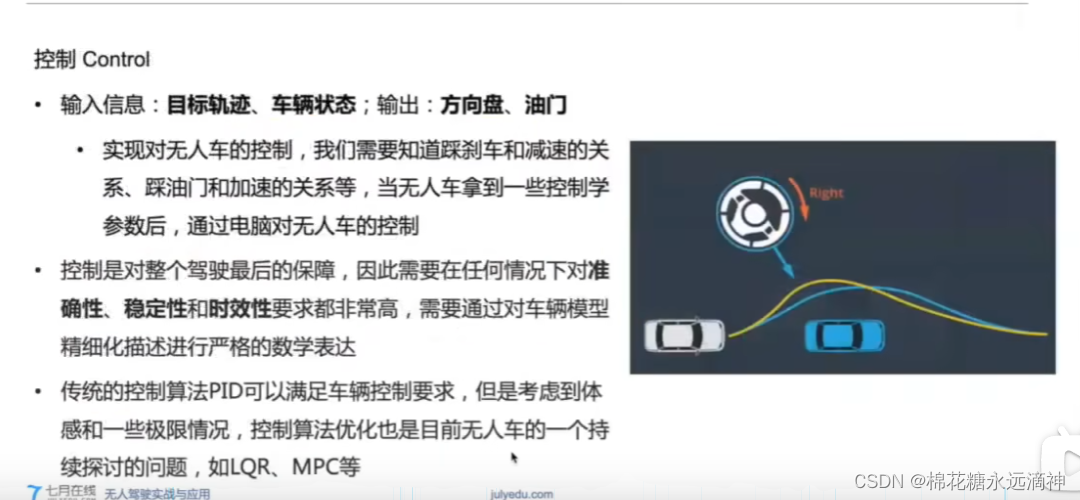
自动驾驶预测-决策-规划-控制学习(1):自动驾驶框架、硬件、软件概述
文章目录 前言:无人驾驶分级一、不同level的无人驾驶实例分析1.L2级别2.L3级别3.L4级别①如何在减少成本的情况下,实现类似全方位高精度的感知呢?②路侧终归是辅助,主车的智能才是重中之重:融合深度学习 二、无人驾驶的…
自动驾驶代客泊车AVP安全监控设计
目 录 安全监控设计... I 文档... I 1 文档... 1 1.1 变更历史 1 1.2 术语 1 1.3 引用文档 1 2 功能综述... 2 3 详细方案... 4 3.1 FPGA供电PMIC的监控 4 3.2 camera接口电路的监控 5 3.3 上电时序监控 6 3.4 供电电压监控 7 3.5 温度的监控 8 3.6 IM…

编写一个简单的服务和客户端(C++)
背景
当节点使用服务进行通信时,发送数据请求的节点称为客户端节点,响应请求的节点称为服务节点。请求和响应的结构由.srv文件确定。
这里使用的例子是一个简单的整数加法系统;一个节点请求两个整数之和,另一个节点响应结果。
…
自动驾驶代客泊车360环式系统及倒车雷达功能规范
1. 文档总概. 8
1.1. 范围. 8
1.2. 名词解释. 8
1.3. 相关应用文档. 8
1.3.1. 文档优先说明. 8
1.3.2. 政府法规与文件. 9
1.3.3. 行业规范与文件. 9
1.3.4. 百度及客户提供相关功能定义文档. 9
2. 系统概述. 10
2.1. …
极智芯 | 解读自动驾驶芯片之英伟达DRIVE系列
欢迎关注我的公众号「极智视界」,获取我的更多技术分享
大家好,我是极智视界,本文分享一下 解读自动驾驶芯片之英伟达DRIVE系列。 邀您加入我的知识星球「极智视界」,星球内有超多好玩的项目实战源码和资源下载,链接:https://t.zsxq.com/0aiNxERDq 对于自动驾驶芯片,之…
准备好迎接新兴的汽车雷达卫星架构了吗?(TI文档)
引言 随着全球新车评估计划的安全等级和法规对主动安全功能的要求越来越严格,安全是当今车辆的一个不容置疑的特征。全球汽车制造商正在满足这些安全要求,并通过不断增强车辆内的高级驾驶辅助系统(ADAS)功能,包括自动紧急制动(AEB)、自适应巡…
使用 rosdep 管理依赖关系
什么是rosdep?
rosdep是 ROS 的依赖管理实用程序,可以与 ROS 包和外部库一起使用。 是一个命令行实用工具,用于标识和安装依赖项以生成或安装包。 在以下情况下,可以调用或调用它:rosdep 构建工作区并需要适当的依赖项…
用BEVformer来卷自动驾驶-3
书接前文 前文链接: 用BEVformer来卷自动驾驶-2 (qq.com) 上文书基本把BEV的概念捋清楚了,也对标准BEV可能存在的计算和显存的压力做了一番分析 这篇就是介绍BEVformer是个啥 先给个定义,BEVformer就是个基本框架:
1-通过多个摄像头来进行特征融合,纯视觉方案
2-通过特征…
MATLAB - 机器人关节空间运动模型
系列文章目录 前言
关节空间运动模型描述了在闭环关节空间位置控制下机械手的运动,在关节空间运动模型(jointSpaceMotionModel)对象和关节空间运动模型块中使用。
机器人机械手是典型的位置控制设备。要进行关节空间控制,需要指…
MATLAB - 使用运动学 DH 参数构建机械臂
系列文章目录 前言 一、 使用 Puma560 机械手机器人的 Denavit-Hartenberg (DH) 参数,逐步建立刚体树形机器人模型。在连接每个关节时,指定其相对 DH 参数。可视化机器人坐标系,并与最终模型进行交互。
DH 参数定义了每个刚体通过关节与其父…
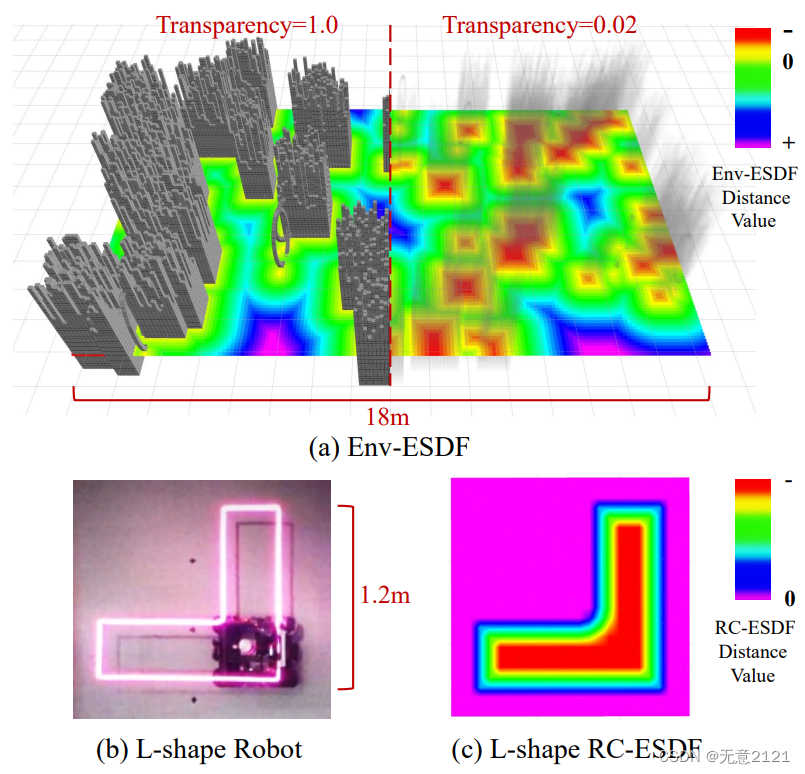
自动驾驶轨迹规划之碰撞检测(二)
欢迎大家关注我的B站:
偷吃薯片的Zheng同学的个人空间-偷吃薯片的Zheng同学个人主页-哔哩哔哩视频 (bilibili.com)
目录
1.基于凸优化
2.具身足迹
3. ESDF 自动驾驶轨迹规划之碰撞检测(一)-CSDN博客
大家可以先阅读之前的博客
1.基于…
移动机器人规划 - 基于搜索的路径规划算法
本文旨在对高飞老师移动机器人规划课程做学习记录,方便日后回顾。 (1)图搜索基础 (2)Dijstra和A*算法 (3)JPS (4)作业
1 图搜索基础
1.1 配置空间(Configur…
【智驾未来】低代码开发:加速创新交融的利器
伴随着人工智能和车联网技术的飞速进步,智能驾驶领域正迅速迈向现实。与此同时,低代码开发平台应运而生,为智能驾驶技术的创新提供了有力保障。智能驾驶技术的持续优化与发展,正引领着交通出行领域的全方位变革。而低代码开发在各…
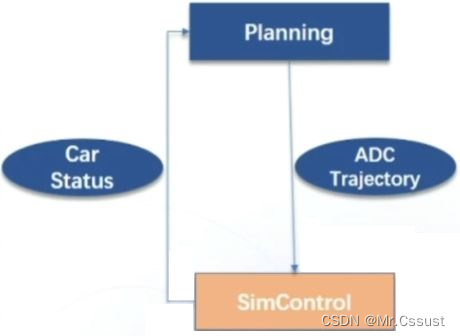
自动驾驶学习笔记(二十)——Planning算法
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往: 《自动驾驶新人之旅》免费课程—> 传送门
《Apollo 社区开发者圆桌会》免费报名—>传送门
文章目录
前言
参考线平滑
双层状态机
EM Planner …
人工智能与自动驾驶:智能出行时代的未来之路
一、前言 首先,我们先来说下什么是人工智能,人工智能(Artificial Intelligence,简称AI)是一门研究如何使计算机系统能够模拟、仿真人类智能的技术和科学领域。它涉及构建智能代理,使其能够感知环境、理解和…
自动驾驶自动换道ALC功能规范
ALC功能规范
Auto Lane Change Functional Specification 文件状态: 【√】草稿 【】正式发布 【】正在修改 文件起草分工 撰写: 审核: 编制: 签名: 日期: 审核: 签名: 日期…
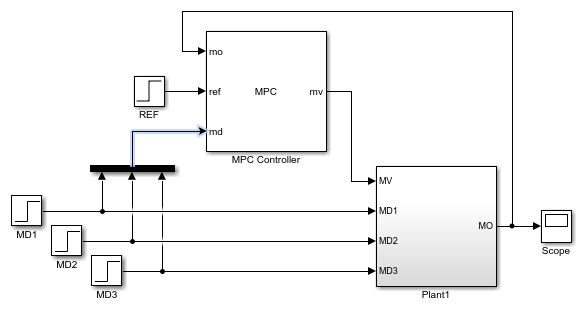
MATLAB - 使用 MPC Designer 线性化 Simulink 模型
系列文章目录 前言
本主题介绍如何使用 MPC Designer 对 Simulink 模型进行线性化。为此,请从包含 MPC 控制器块的 Simulink 模型打开该应用程序。本例中使用 CSTR_ClosedLoop 模型。
open_system(CSTR_ClosedLoop) 在模型窗口中,双击 MPC 控制器模块。…
新手上路:自动驾驶行业快速上手指南
文章目录 1.自动驾驶技术的发展1.1 工业革命驱动自动驾驶技术发展1.2 想象中的未来:科幻作品中的自动驾驶汽车1.3 自动驾驶技术萌芽与尝试1.4 百花争鸣:自动驾驶科技巨头与创业公司并进 2.个人开发者,如何玩转自动驾驶?2.1 灵活易…

用BEVformer来卷自动驾驶-4
书接前文 前文链接:用BEVformer来卷自动驾驶-3 (qq.com) 上文书介绍了BEVformer是个啥,以及怎么实现Deformable-attention 我们继续
BEVformer的输入数据格式: 输入张量(batachsize,queue,cam,…
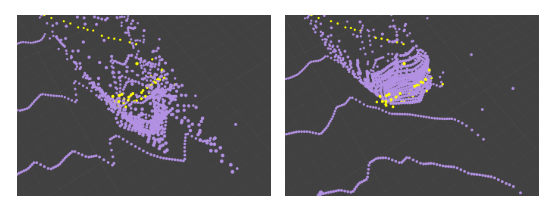
PSEUDO-LIDAR++:自动驾驶中 3D 目标检测的精确深度
论文地址:PSEUDO-LIDAR: ACCURATE DEPTH FOR 3D OBJECT DETECTION IN AUTONOMOUS DRIVING 论文代码:https://github.com/mileyan/Pseudo_Lidar_V2
摘要
3D 检测汽车和行人等物体在自动驾驶中发挥着不可或缺的作用。现有方法很大程度上依赖昂贵的激光雷…

【单目测距】3D检测框测距
文章目录 一、前言二、2D框测距局限性三、3D框测距3.1、确定接地点3.2、测距结果对比3.3、代码3.4、代码解析 四、后记 一、前言
3D 检测模型用的 fcos3D。如何对 3D 框测距?3D 检测框测距对比 2D 检测框测距优势在哪? 二、2D框测距局限性
(1) 横向测距偏差。当目标有一定倾…
【强化学习】Deep Q Learning
Deep Q Learning
在前两篇文章中,我们发现RL模型的目标是基于观察空间 (observations) 和最大化奖励和 (maximumize sum rewards) 的。
如果我们能够拟合出一个函数 (function) 来解决上述问题,那就可以避免存储一个 (在Double Q-Learning中甚至是两个…
![[ToolsChains CPP] Osqp的使用之二:MPCdemo-自动驾驶纵向mpc控制](https://img-blog.csdnimg.cn/direct/679b8509b2f548c3959a94fe96bd3142.png)
[ToolsChains CPP] Osqp的使用之二:MPCdemo-自动驾驶纵向mpc控制
写在前面
本文是上一篇的后续,https://blog.csdn.net/weixin_46479223/article/details/135070489
本文将先解读官网mpc的例子, 然后实现一个自己设计的mpc的控制器;不远的未来的目标是成为我闭环仿真器(轨迹处理、规划、控制接…
理解pytorch系列:整型索引是怎么实现的
整型索引的匹配规则
在PyTorch中使用整型索引时,需要遵循一些基本规则来确定如何从原始张量中选择数据。整型索引可以是Python中的列表或者数组、NumPy数组,或者是PyTorch的LongTensor。整型索引允许在任何维度上进行复杂的数据选取操作,例如…
神经网络的学习(Neural Networks: Learning)
1.代价函数
案例:假设神经网络的训练样本有𝑚个,每个包含一组输入𝑥和一组输出信号𝑦,𝐿表示神经网络层数,𝑆𝐼表示每层的 neuron 个数(𝑆&#…
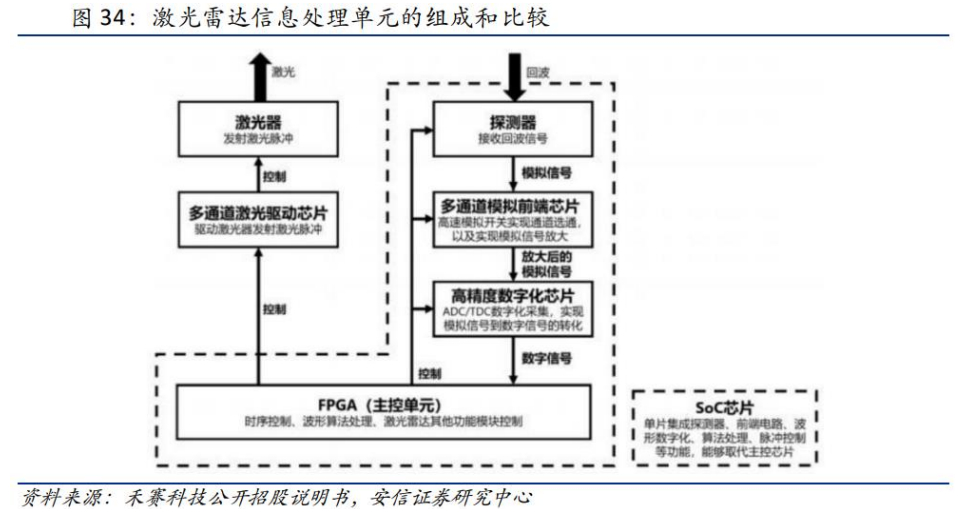
激光雷达行业梳理1-概述、市场、技术路线
激光雷达作为现代精确测距和感知技术的关键组成部分,在近几年里取得了令人瞩目的发展。作为自动驾驶感知层面的重要一环,相较摄像头、毫米波雷达等其他传感器具有“ 精准、快速、高效作业”的巨大优势,已成为自动驾驶的主传感器之一ÿ…

现代雷达车载应用——第3章 MIMO雷达技术 3.2节 汽车MIMO雷达波形正交策略
经典著作,值得一读,英文原版下载链接【免费】ModernRadarforAutomotiveApplications资源-CSDN文库。
3.2 汽车MIMO雷达波形正交策略 基于MIMO雷达技术的汽车雷达虚拟阵列合成依赖于不同天线发射信号的可分离性。当不同天线的发射信号正交时&#x…
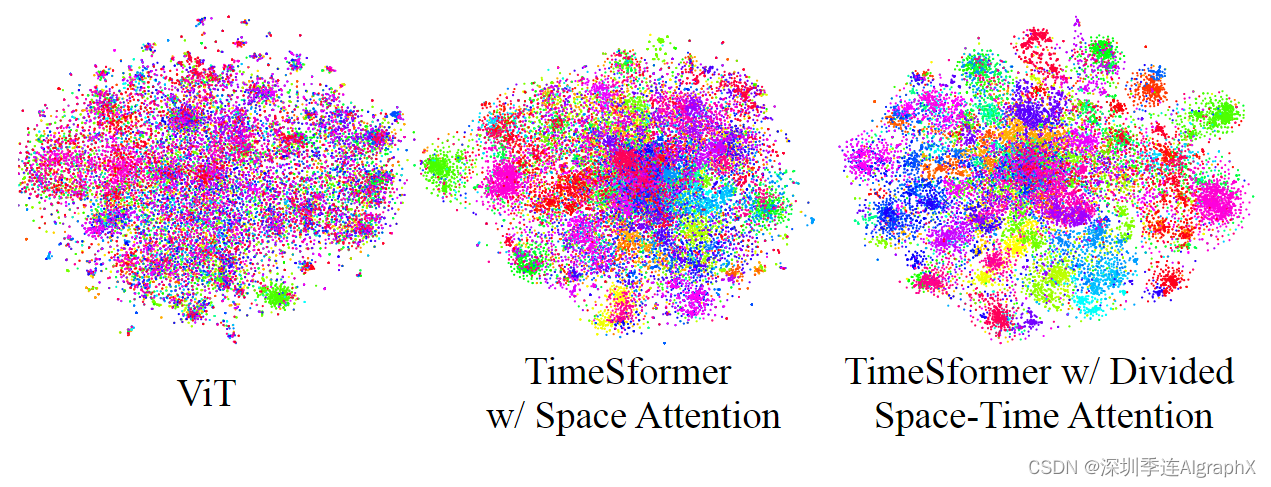
51-15 视频理解串讲—TimeSformer论文精读
今天读的论文题目是Is Space-Time Attention All You Need for Video Understanding?
Facebook AI提出了一种称为TimeSformer视频理解的新架构,这个架构完全基于transformer,不使用卷积层。它通过分别对视频的时间和空间维度应用自注意力机制ÿ…
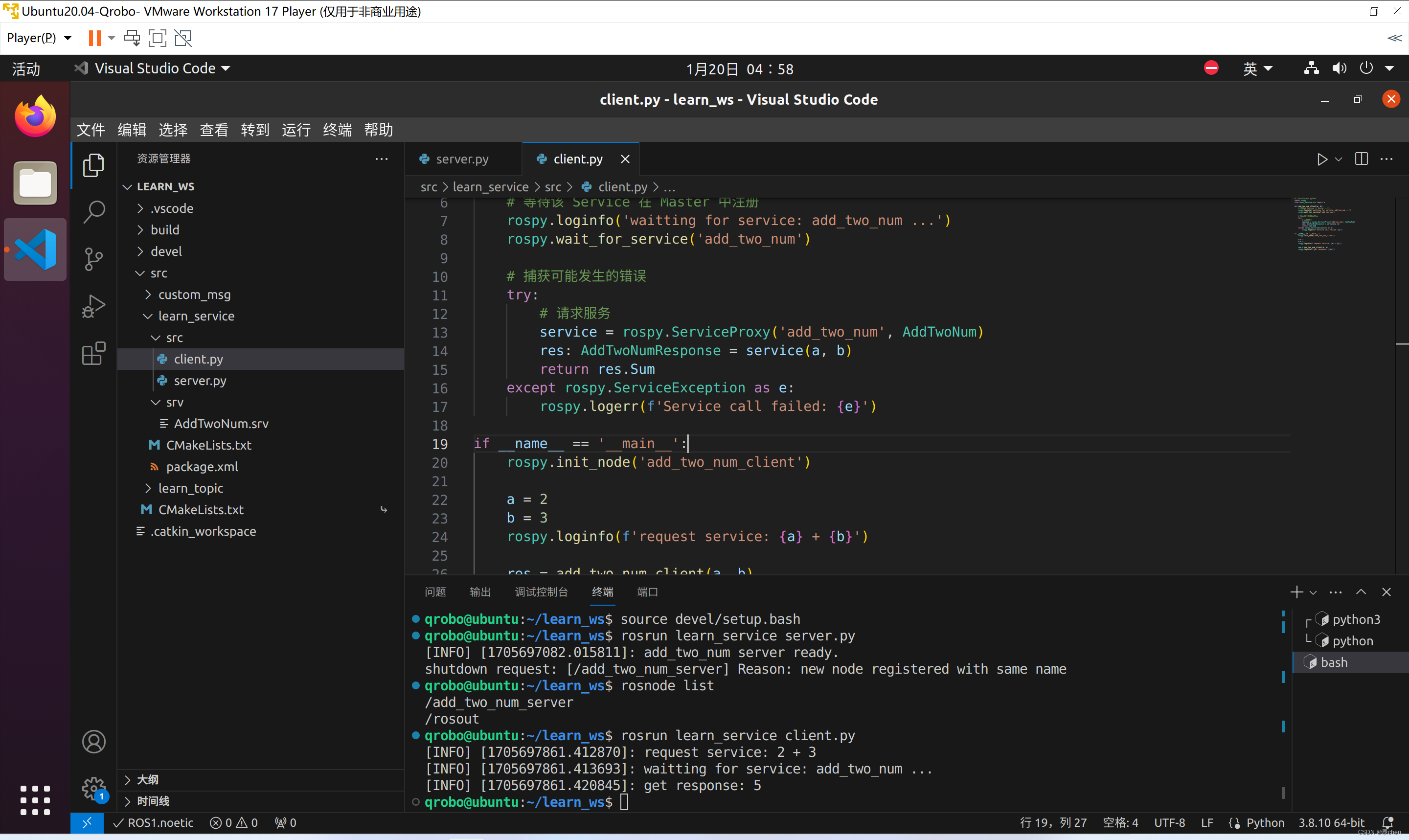
仿真机器人-深度学习CV和激光雷达感知(项目2)day04【简单例程】
文章目录 前言简单例程运行小海龟仿真启动节点查看计算图发布 Topic调用 Serviece 用 Python 发布和接收 Topic创建工作空间创建功能包,编译编写 Topic Publisher 节点编写 Topic Subscriber 节点运行节点 自定义消息类型用 Python 注册和调用 Serviece新建功能包在…

驾驶未来:百度Apollo自动驾驶技术的探索与实践(文末赠送apollo周边)
🎬 鸽芷咕:个人主页 🔥 个人专栏:《linux深造日志》《粉丝福利》 ⛺️生活的理想,就是为了理想的生活! ⛳️ 粉丝福利活动 ✅参与方式:通过连接报名观看课程,即可免费获取精美周边 ⛳️活动链接…

【目标跟踪】多相机环视跟踪
文章目录 一、前言二、流程图三、实现原理3.1、初始化3.2、输入3.3、初始航迹3.4、航迹预测3.5、航迹匹配3.6、输出结果 四、c 代码五、总结 一、前言
多相机目标跟踪主要是为了实现 360 度跟踪。单相机检测存在左右后的盲区视野。在智能驾驶领域,要想靠相机实现无…
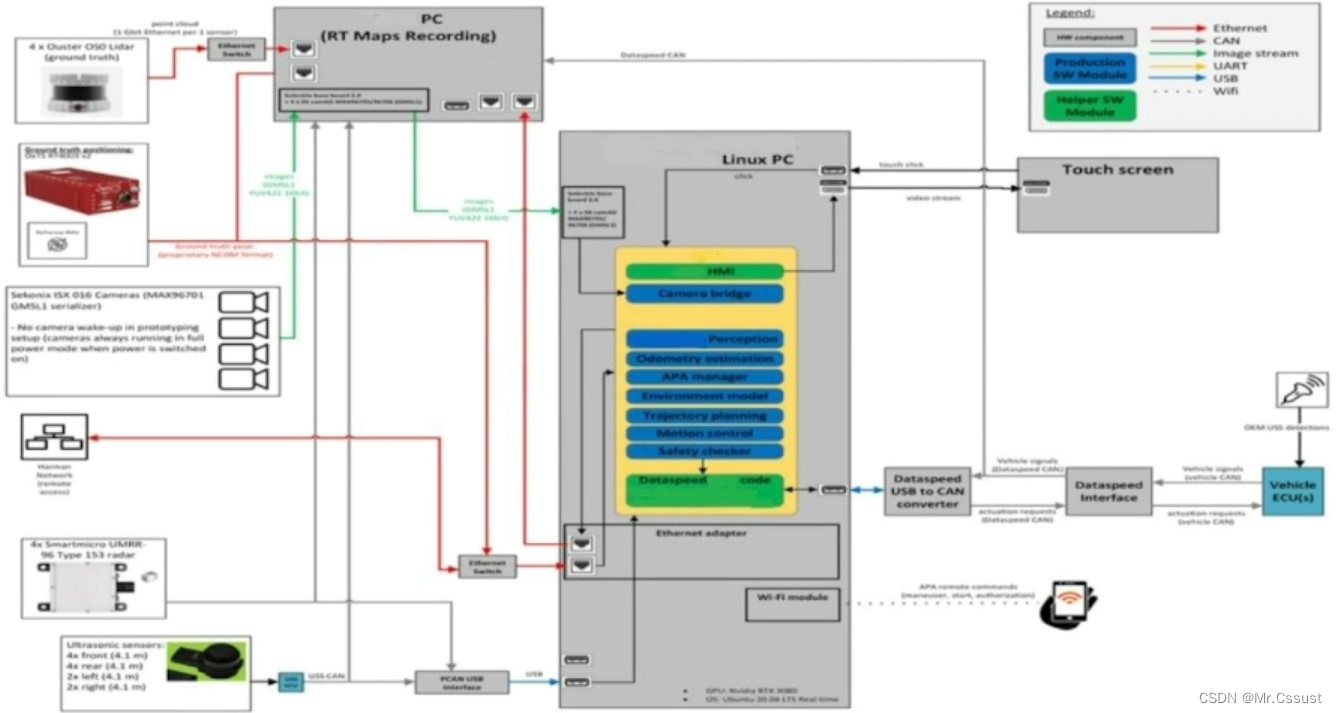
自动驾驶学习笔记(二十一)——自动泊车系统
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往: 《自动驾驶新人之旅》免费课程—> 传送门
《Apollo开放平台9.0专项技术公开课》免费报名—>传送门
文章目录
前言
泊车任务
泊车过程
硬件基础…
ros2移植Apollo的Lattcie的部分算法并实现与carla0.9.13的联合仿真
ros2移植Apollo的Lattcie的部分算法并实现与carla0.9.13的联合仿真
python版本说明
ubuntu18.04的ros2不能像ros1一样使用python2.7,必须是3.7!!!
选择一:系统安装的python3.7(ubuntu18.04不适用&#x…

Pytorch深度强化学习2-1:基于价值的强化学习——DQN算法
目录 0 专栏介绍1 基于价值的强化学习2 深度Q网络与Q-learning3 DQN原理分析4 DQN训练实例 0 专栏介绍
本专栏重点介绍强化学习技术的数学原理,并且采用Pytorch框架对常见的强化学习算法、案例进行实现,帮助读者理解并快速上手开发。同时,辅…
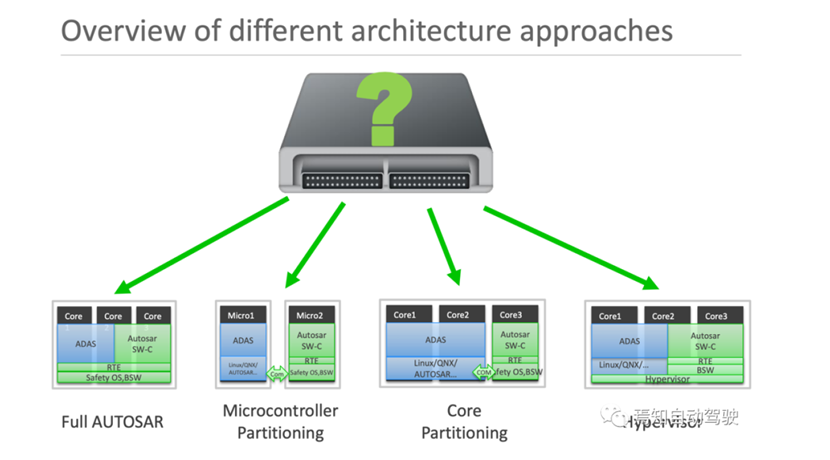
自动驾驶和智能座舱软件介绍(二)
作者 / 阿宝
编辑 / 阿宝
出品 / 阿宝1990 自动驾驶软件介绍 自动驾驶底层操作系统及软件架构 底层可以包括多种芯片,以太网通信中间件保证网络通信和不同OS任务分配的确定性
Automotive uC,单片机,如英飞凌AURIX,运行AUTOSARB…
解读BEVFormer,新一代自动驾驶视觉工作的基石
文章出处
BEVFormer这篇文章很有划时代的意义,改变了许多视觉领域工作的pipeline[2203.17270] BEVFormer: Learning Birds-Eye-View Representation from Multi-Camera Images via Spatiotemporal Transformers (arxiv.org)https://arxiv.org/abs/2203.17270
BEV …
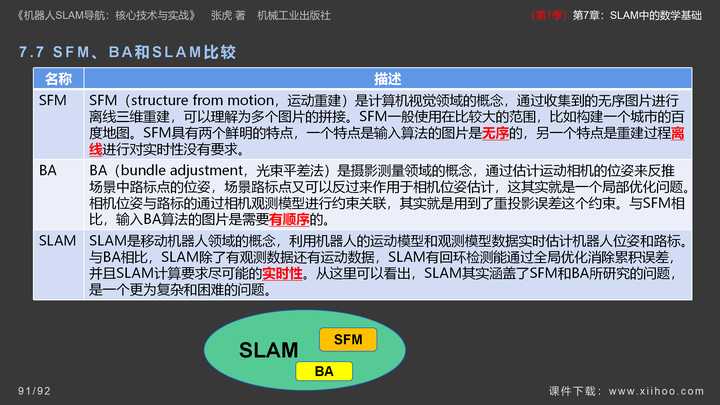
《机器人SLAM导航核心技术与实战》第1季:第7章_SLAM中的数学基础
视频讲解 【第1季】7.第7章_SLAM中的数学基础-视频讲解 【第1季】7.1.第7章_SLAM中的数学基础_SLAM发展简史-视频讲解 【第1季】7.2.第7章_SLAM中的数学基础_SLAM中的概率理论-视频讲解 【第1季】7.3.第7章_SLAM中的数学基础_估计理论-视频讲解 【第1季】7.4.第7章_SLAM中的…
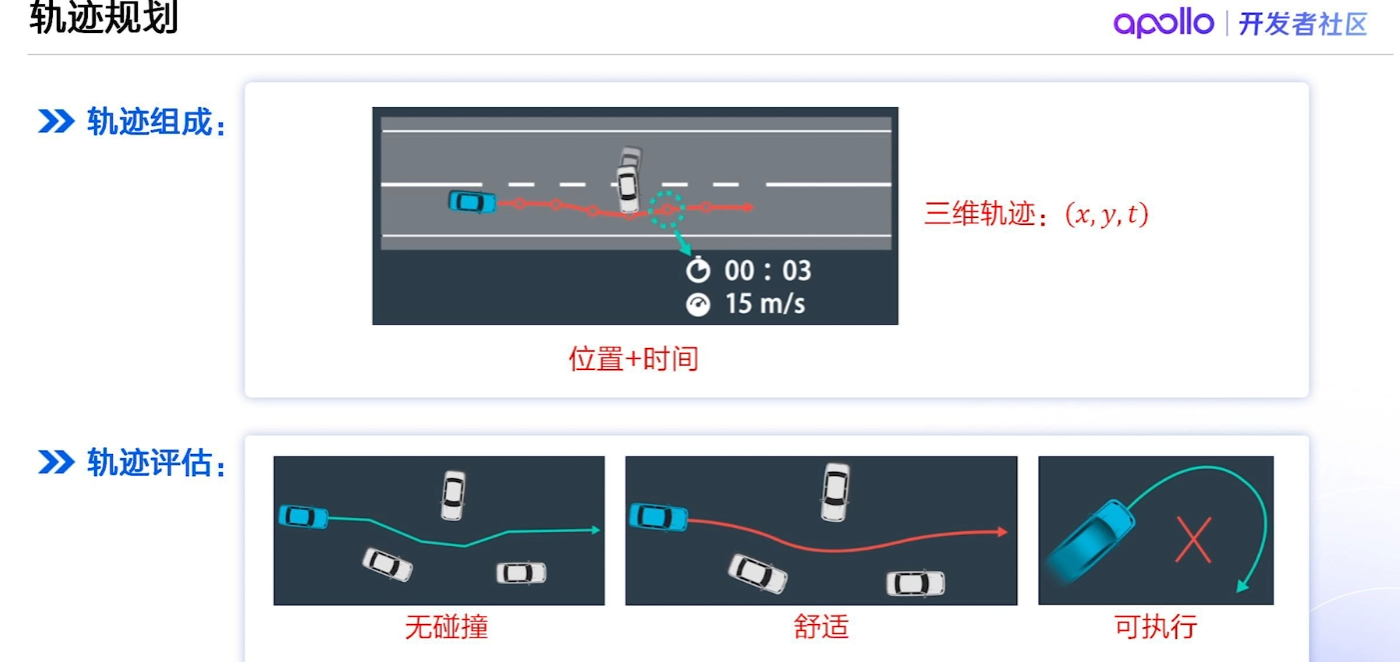
【百度Apollo】自动驾驶规划技术:实现安全高效的智能驾驶
🎬 鸽芷咕:个人主页 🔥 个人专栏:《linux深造日志》《粉丝福利》 ⛺️生活的理想,就是为了理想的生活! ⛳️ 推荐 前些天发现了一个巨牛的人工智能学习网站,通俗易懂,风趣幽默,忍不住分享一下…
【Java万花筒】驶入未来:利用Java库构建智能自动驾驶与车联网系统
加速汽车智能化:解析自动驾驶与车联网的Java库应用技巧
前言
随着自动驾驶和车联网技术的发展,开发人员需要强大的工具和资源来构建智能交通系统。本文将介绍几个重要的Java库,包括Autoware、Apollo、OpenXC、CarSync和V2XLib,它…

“2024成都国际电子信息产业展览会”新西部、新重构、新机遇
随着西部大开发和科技兴国的战略深入实施,四川的经济发展已经取得了令人瞩目的成就。作为西部的核心,四川在能源化工、装备制造、航天科技等产业方面均处于国内领先地位,同时也是全国重要的基础电子装备基地。这一发展背景为2024年成都国际电…
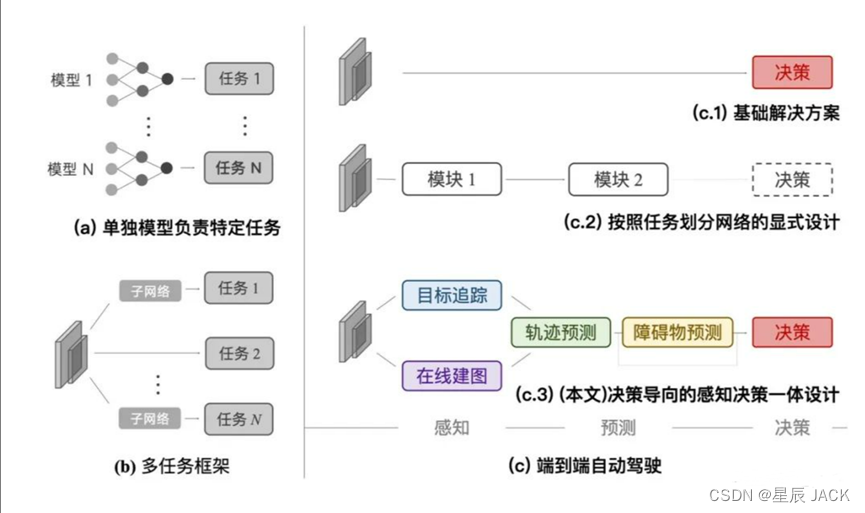
端到端自动驾驶通用算法框架UniAD
端到端自动驾驶通用算法框架UniAD
引言
自动驾驶是一项高度复杂的技术,需要多个学科领域的知识和技能,包括传感器技术、机器学习、路径规划等方面。自动驾驶还需要适应不同的道路规则和交通文化,与其他车辆和行人进行良好的交互,…
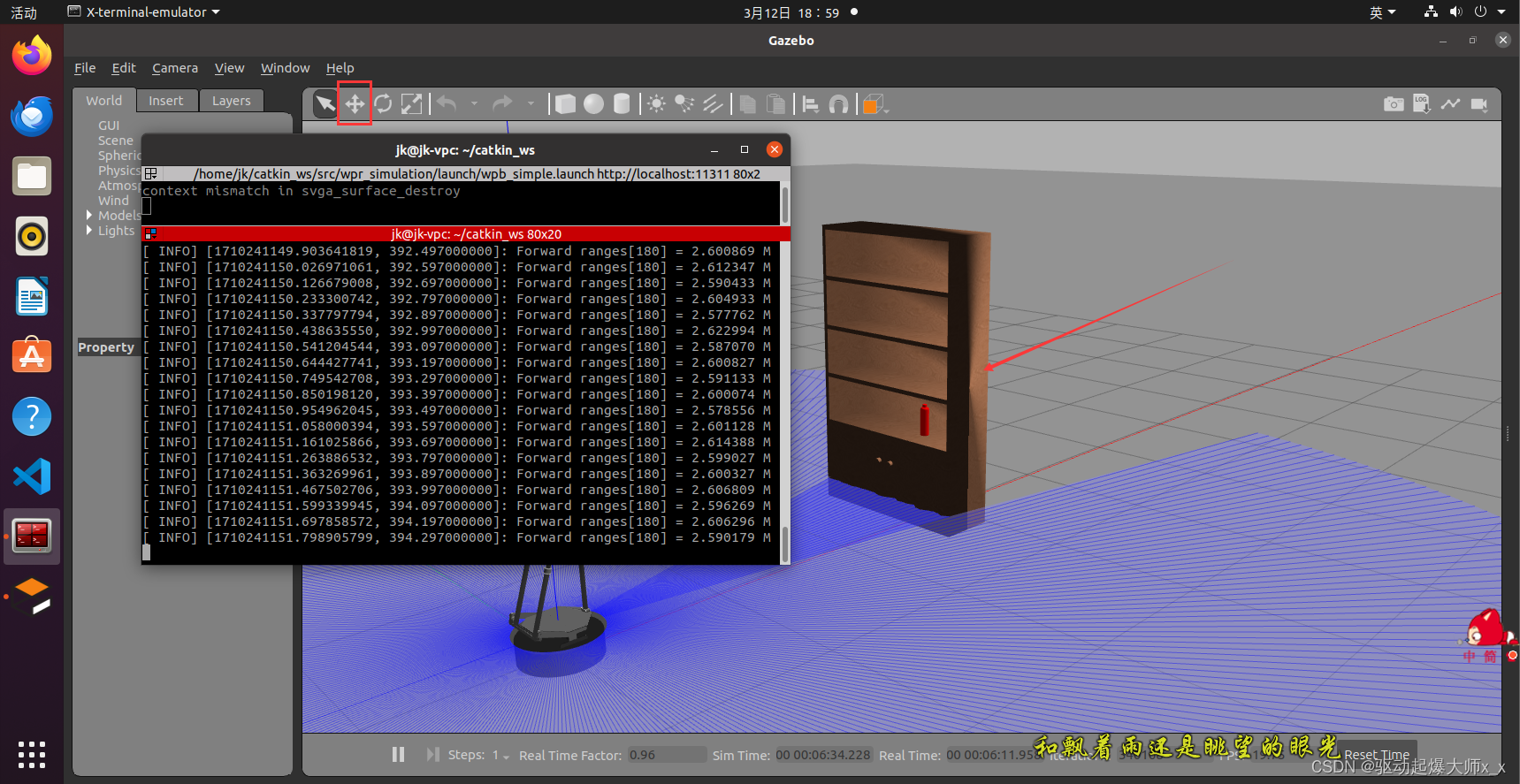
《Ubuntu20.04环境下的ROS进阶学习3》
一、获取激光雷达数据 在做激光slam的时候,我们首先要获取雷达的基础信息。再使用hector _mapping或gmapping等算法建图。 二、了解激光雷达消息包格式 首先登录 index.ros.org 网站搜索一下sensor_msgs消息包。您也可以直接搜这个网址sensor_msgs - ROS Wiki &…
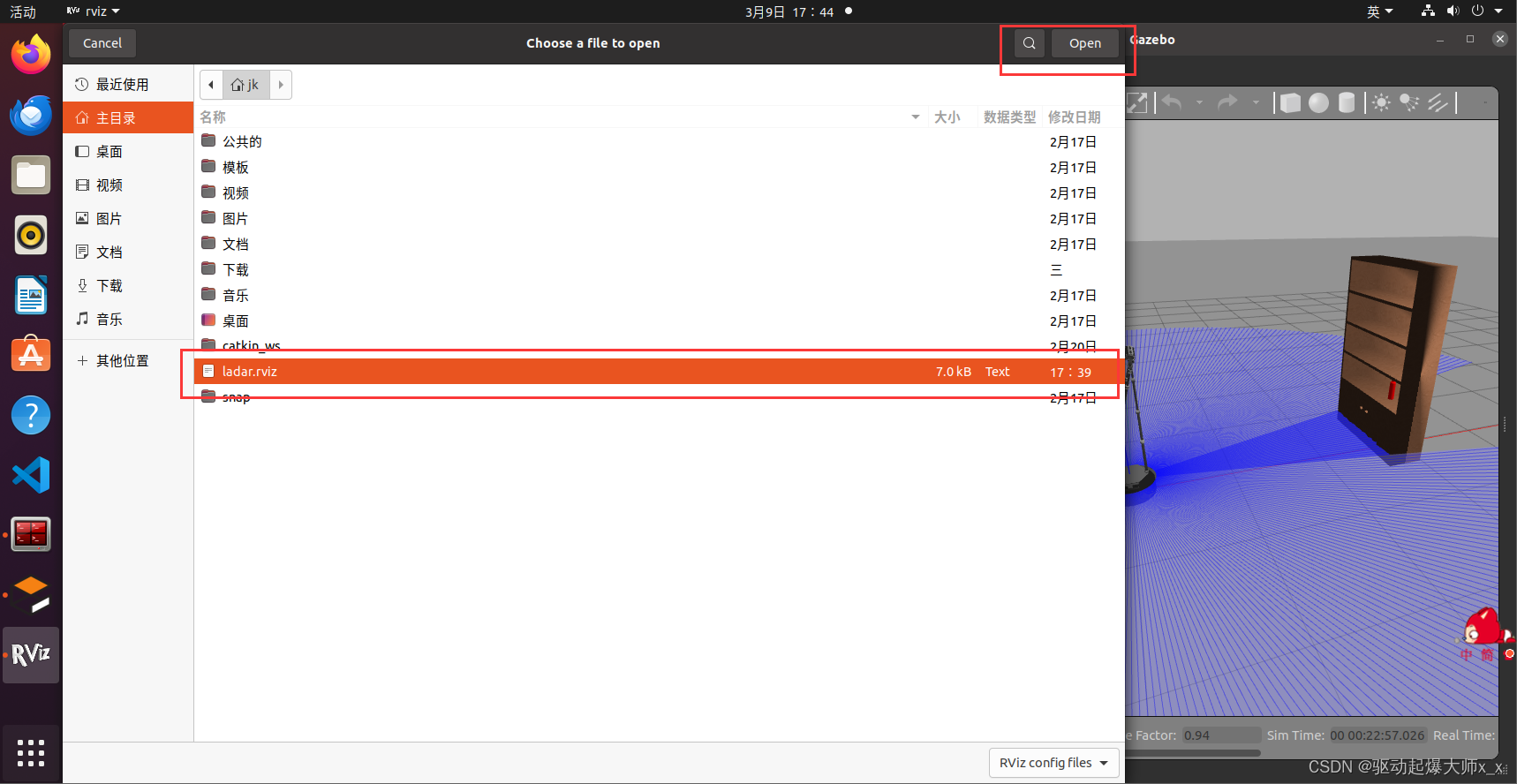
《Ubuntu20.04环境下的ROS进阶学习2》
一、使用rviz和gazebo实时仿真 本节我们将使用三维可视化工具rviz(The Robot Visualization Tool)来实时观测gazebo仿真中的激光雷达数据。 二、打开仿真gazebo项目 如果您已经按照 《Ubuntu20.04环境下的ROS进阶学习0》-CSDN博客 如果您已经按照上次的文…
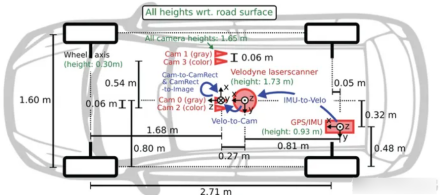
【数据集】2023自动驾驶开源数据集-学习笔记
文章目录 1. 自动驾驶有哪些公开数据集2. 预测相关的数据集有哪些 1. 自动驾驶有哪些公开数据集 waymo open dataset 适应任务: 域适应,2D追踪,2D检测,3D追踪,3D检测,实时2D检测,实时3D检测,交互…
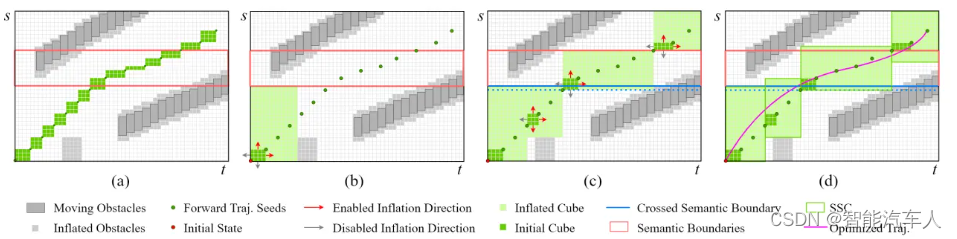
自动驾驶---Motion Planning之构建SLT Driving Corridor
1 背景 在上篇博客《自动驾驶---Motion Planning之Speed Boundary》中,主要介绍了Apollo中Speed Boundary的一些内容,可以构造ST图得到边界信息,最后结合粗糙的速度曲线和路径曲线,即可使用优化的方法求解得到最终的轨迹信息(s,s,s,l,l,l)。 本篇博客笔者主要介绍近…
机器学习笔记 - 用于3D物体检测的KITTI数据集的使用及说明
一、什么是 KITTI 数据集? KITTI 是由卡尔斯鲁厄理工学院和芝加哥丰田理工学院开发的自动驾驶数据集(目前分2012和2015版本)。它是计算机视觉研究中使用的图像和 LIDAR 数据的集合,例如立体视觉、光流、视觉里程计、3D 对象检测和…
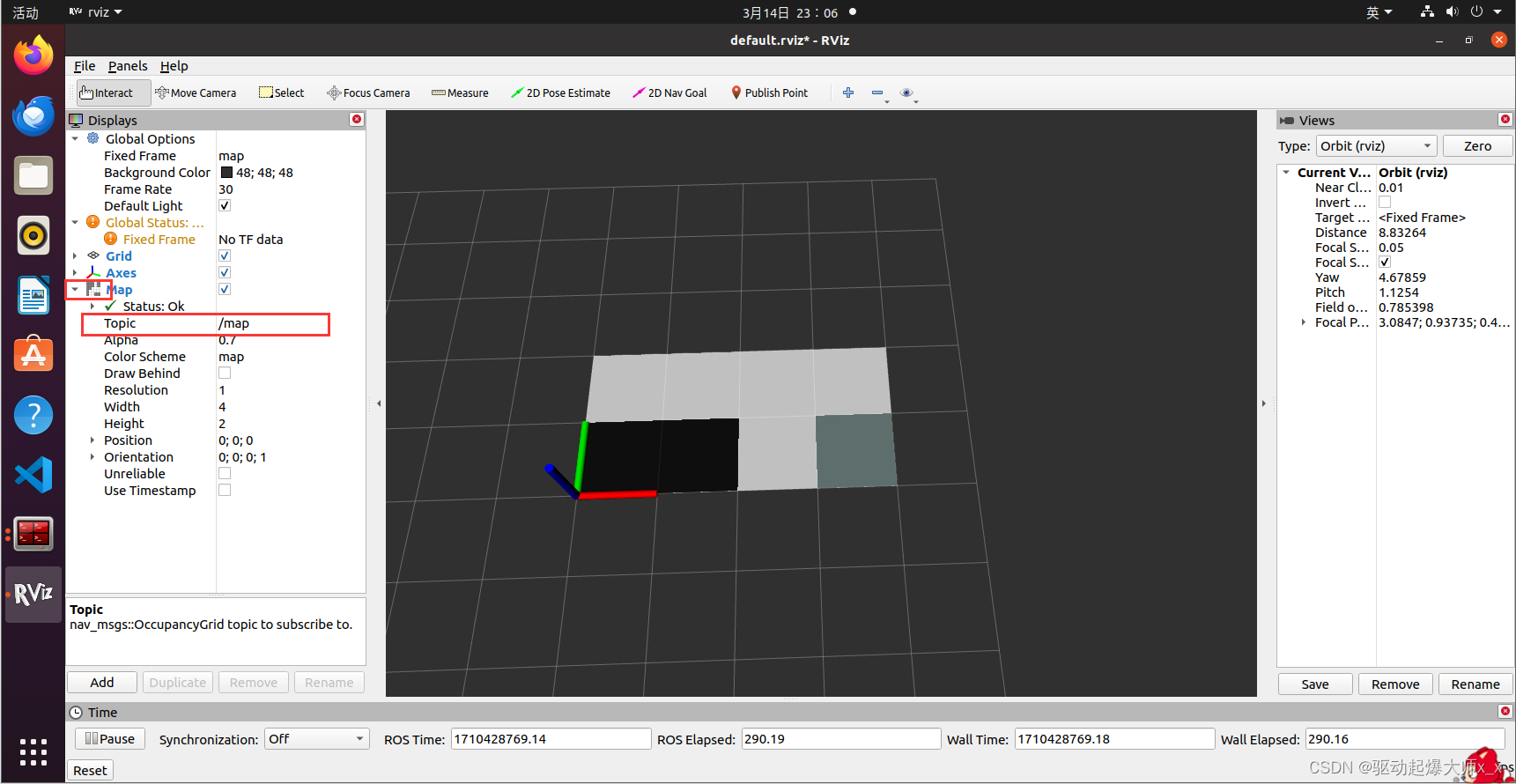
《Ubuntu20.04环境下的ROS进阶学习4》
一、发布地图消息 在上一小节中我们已经获取到了激光雷达的数据,在本接中我们将学习地图数据格式和如何发布地图数据。 二、了解地图数据格式 首先登录 index.ros.org 网站搜索一下map_server消息包。您也可以直接搜这个网址 map_server - ROS Wiki ,下翻…
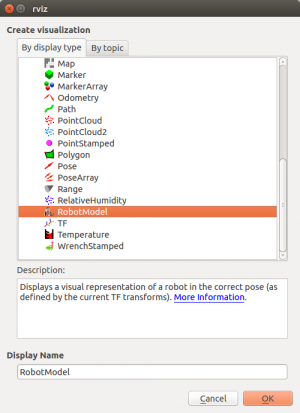
Sawyer 机器人 ROS SDK 配置
系列文章目录
目录
系列文章目录
前言
恢复出厂设置
内容
概述
要求
程序
将 Sawyer 升级到 Intera SDK 打印
内容
概述
先决条件
安装步骤
将机器人从 Intera MFG 切换到 SDK 模式
联网
内容
确认 Sawyer 在机器人上以 SDK 模式运行
基本
基本要求
网络…

山姆・阿尔特曼重返OpenAI董事会;Car-GPT:LLMs能否最终实现自动驾驶?
🦉 AI新闻
🚀 山姆・阿尔特曼重返OpenAI董事会
摘要:经历长达数月的审查后,山姆・阿尔特曼已重返OpenAI董事会,并作为返回条件之一,OpenAI还新增了三名外部女性董事会成员。这标志着公司正努力摆脱去年11…
大模型在自动驾驶决策系统中的前沿应用
摘要:
本文主要探讨了大模型在自动驾驶决策系统中的前沿应用,包括背景、核心技术和应用场景。自动驾驶决策系统是自动驾驶技术的核心组成部分,而大模型的应用为决策系统提供了强大的计算能力和决策能力。本文首先介绍了自动驾驶决策系统的重…

小马智行与卢森堡签署自动驾驶合作谅解备忘录
近日,自动驾驶企业小马智行宣布与卢森堡大公国政府签署谅解备忘录,促进自动驾驶汽车及技术在卢森堡的发展。该文件由小马智行联合创始人、CEO彭军与卢森堡经济部长Lex Delles共同签署,这也标志着小马智行与卢森堡政府就推动该地区的自动驾驶研…
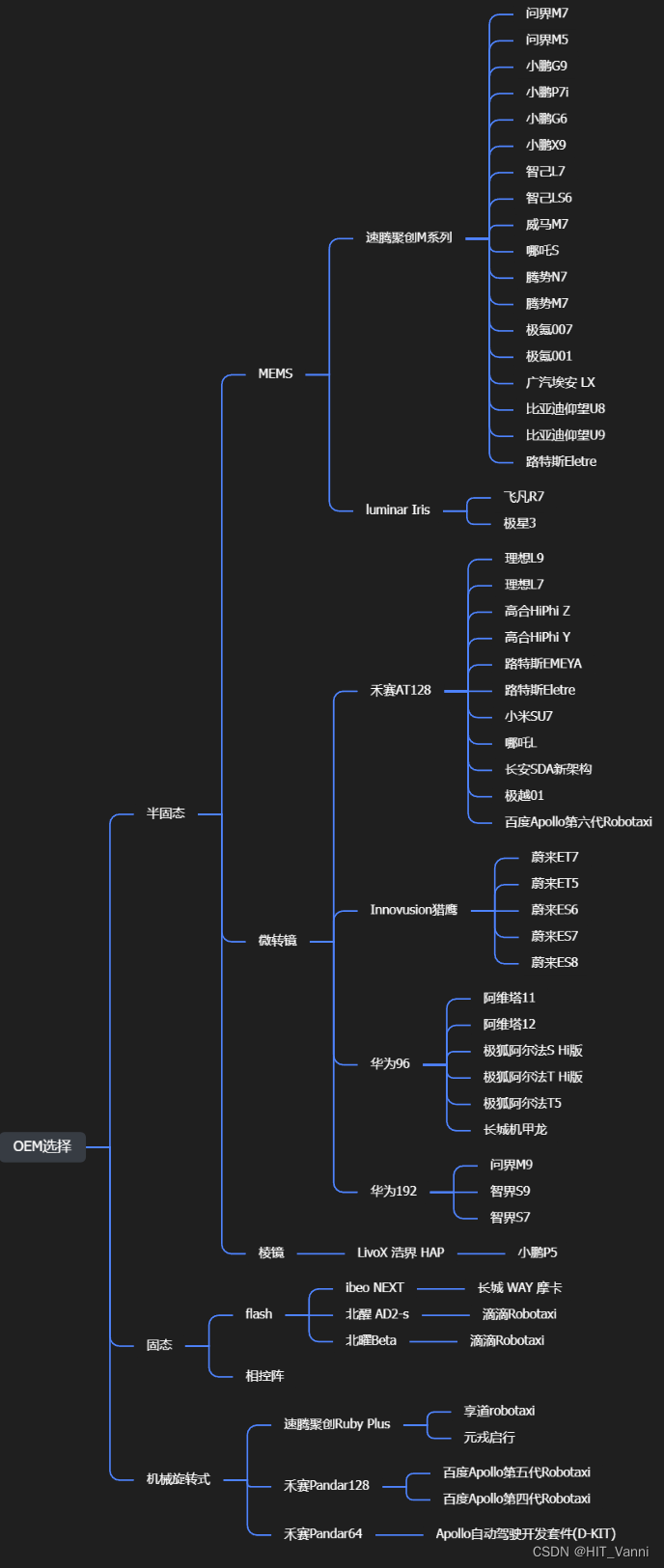
【Lidar】Lidar激光雷达一篇全(两万字激光雷达详细介绍)
【Lidar】Lidar激光雷达一篇全 1. 激光雷达测距原理1.1 三角测距1.2 飞行时间测距(TOF,Time of Flight) 2. 车载激光雷达类别2.1 机械旋转式2.2 固态2.2.1 相控阵 2.3 半固态(混合固态)2.3.2 微转镜/棱镜 3. 激光雷达性…

【学习记录】调试千寻服务+DTU+导远RTK过程的记录
最近调试车载定位的时候,遇到了一些问题,千寻服务已经正确配置到RTK里面了,但是导远的定位设备一直显示RTK浮动解,通过千寻服务后台查看状态,长时间显示不合法的GGA值。 首先,通过四处查资料,千…
2024.2.20 校招 实习 内推 面经
绿*泡*泡VX: neituijunsir 交流*裙 ,内推/实习/校招汇总表格 1、校招 | 视比特机器人2024春季招聘正式开启!
校招 | 视比特机器人2024春季招聘正式开启! 2、面经 | OPPO23届秋招 - 后端真题 2
面经 | OPPO23届秋招 - 后端真题…

因子图、边缘化与消元算法的抽丝剥茧 —— Notes for “Factor Graphs for Robot Perception“
Title: 因子图、边缘化与消元算法的抽丝剥茧 —— Notes for “Factor Graphs for Robot Perception” 文章目录 I. 前言II. 因子图的基本概念1. 因子图的定义2. SLAM 中的因子图A. 因子图的图示B. 因子图的因式C. 因子图的二分图形式 III. 边缘化与消元运算的基本原理1. 边缘化…
科普类——双目视觉在自动驾驶中存在的问题、挑战以及解决方案(三)
科普类——双目视觉在自动驾驶中存在的问题、挑战以及解决方案(三) 双目视觉在自动驾驶中的应用虽然具有许多优势,但也存在一些问题和挑战,这些问题在不同的驾驶环境和条件下可能会有所不同。以下是一些主要问题及其可能的解决方案…
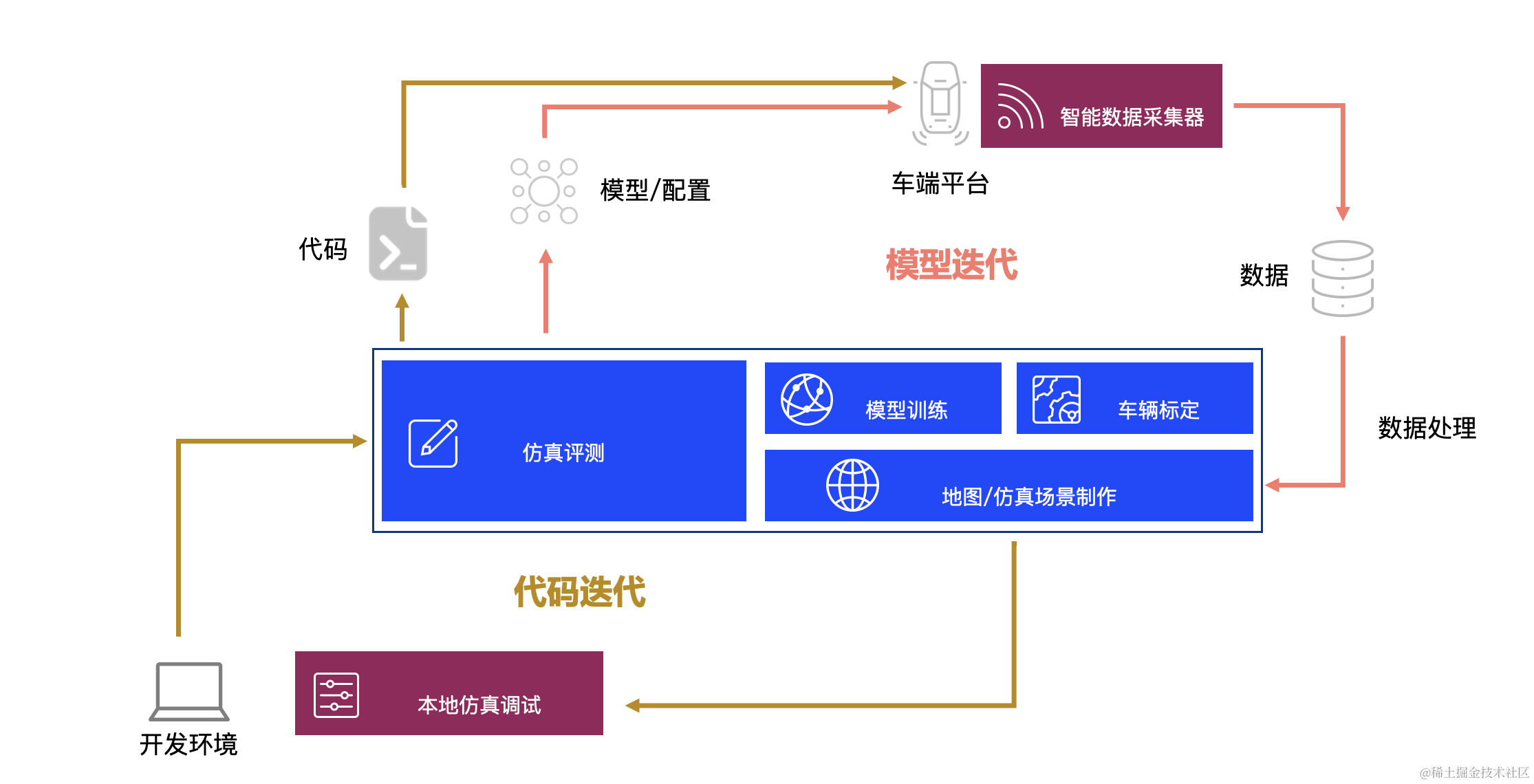
【百度Apollo】探索自动驾驶:深入解析Apollo开放平台架构的博客指南
🎬 鸽芷咕:个人主页 🔥 个人专栏: 《linux深造日志》《粉丝福利》 ⛺️生活的理想,就是为了理想的生活! ⛳️ 推荐 前些天发现了一个巨牛的人工智能学习网站,通俗易懂,风趣幽默,忍不住分享一下…
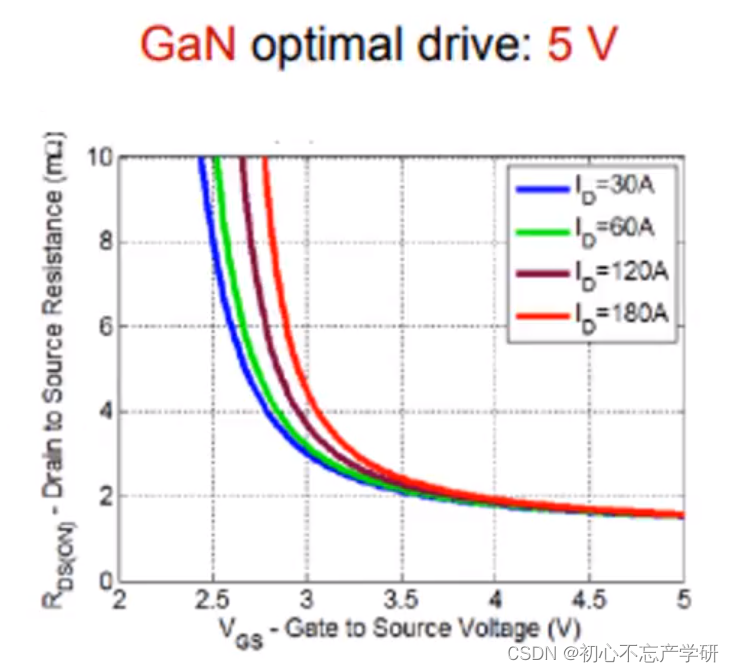
车载充电器(OBC)氮化镓(GaN)驱动(高压高功率)设计(第四篇)
上图来自于网络
1、GaN FET概念
GaN FET,全称为Gallium Nitride Field-Effect Transistor(氮化镓场效应晶体管),是一种采用氮化镓(Gallium Nitride, GaN)材料制作的新型功率半导体器件。相较于传统的硅基…

华为自动驾驶干不过特斯拉?
文 | AUTO芯球
作者 | 李诞
什么?
华为的智能驾驶方案干不过蔚小理?
特斯拉的智能驾驶[FSD]要甩中国车企几条街?
这华为问界阿维塔刚刚推送“全国都能开”的城区“无图 NCA” 就有黑子来喷了
这是跪久了站不起来了吧
作为玩车14年&…
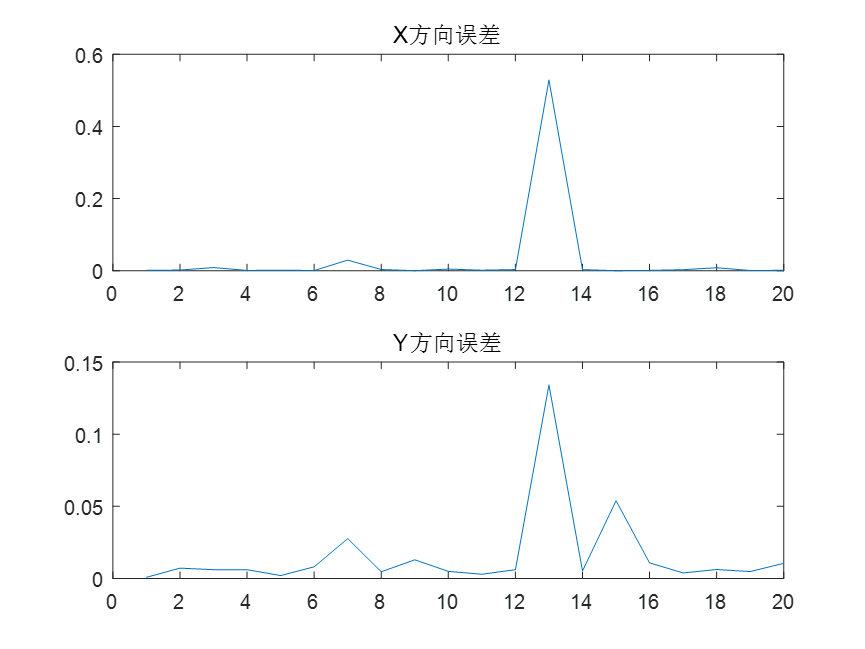
雷达DoA估计的跨行业应用--麦克风阵列声源定位(Matlab仿真)
一、概述 麦克风阵列: 麦克风阵列是由一定数目的声学传感器(麦克风)按照一定规则排列的多麦克风系统,而基于麦克风阵列的声源定位是指用麦克风拾取声音信号,通过对麦克风阵列的各路输出信号进行分析和处理,…
12.02 校招 实习 内推 面经
绿*泡*泡VX: neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、校招 | 小鹏汽车2024届全球校园招聘
校招 | 小鹏汽车2024届全球校园招聘 2、校招 | 三一智能制造总部精选岗位热招中
校招 | 三一智能制造总部精选岗位热招中 3、爱立信2024校园招聘 |…
![[自动驾驶算法][从0开始轨迹预测]:二、自动驾驶系统中常用的坐标系及相应的转换关系](https://img-blog.csdnimg.cn/direct/8f775186530c4a2891335c73f900dada.png#pic_center)
[自动驾驶算法][从0开始轨迹预测]:二、自动驾驶系统中常用的坐标系及相应的转换关系
自动驾驶中常见的坐标系与坐标转换 1. 传感器坐标系1.1 相机坐标系统1) 相机相关基础知识2) 相机各坐标系图像/像素坐标系相机坐标系像平面坐标系 3) 相机各坐标系之间的转换像平面坐标系到像素坐标系的转换(平移缩放变换)相机坐标系转像平面坐标系&…

贝叶斯树增量式更新的细嚼慢咽
Title: 贝叶斯树增量式更新的细嚼慢咽 —— Notes for “The Bayes Tree: An Algorithmic Foundation for Probabilistic Robot Mapping” 文章目录 I. 前言II. 贝叶斯树的构建关系III. 贝叶斯树增量式更新的基础IV. 贝叶斯树增量式更新的算法V. 贝叶斯树增量式更新的实例VI. 总…

大模型时代下的自动驾驶研发测试工具链-SimCycle
前言:
最近OpenAI公司的新产品Sora的发布,正式掀起了AI在视频创作相关行业的革新浪潮,AI不再仅限于文本、语音和图像,而直接可以完成视频的生成,这是AI发展历程中的又一座重要的里程碑。AI正在不断席卷着过去与我们息…
【点云】激光点云建图评测
处理工具
Pcap合并软件
sudo apt install wireshark-common合并Pcap文件,路径为数据文件夹下,
#mergecap -w <输出的新Pcap> <输入的Pcap>
mergecap -w lidar_output.pcap slice2099-06-01/LIDAR/lidar.pcap slice2099-06-02/LIDAR/lidar…
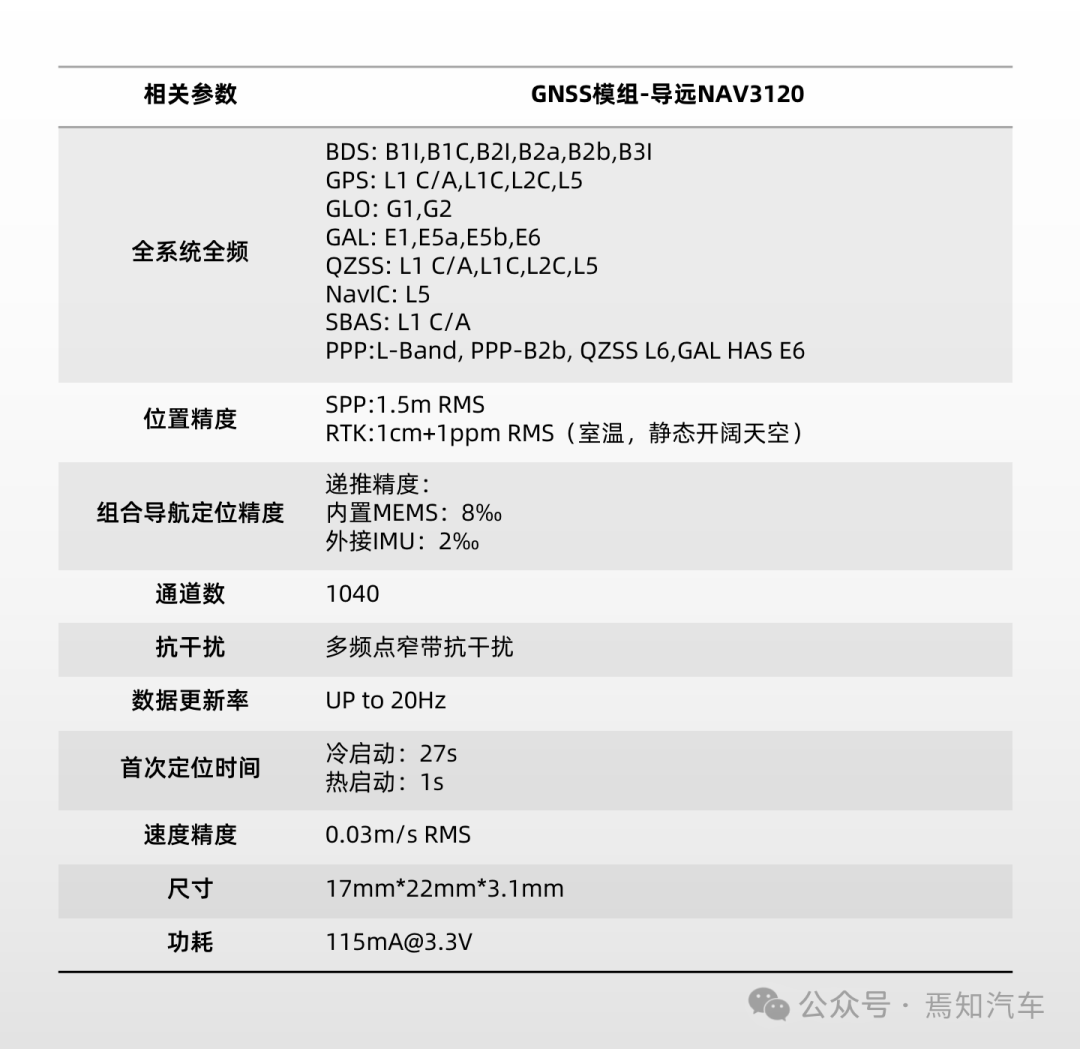
车载GNSS —— 支撑城市NOA落地的关键技术
摘要:
车规级量产落地项目经验和量产交付能力也是主机厂考察定位厂商的关键因素之一
目前,城市NOA的定位普遍采用卫惯组合导航系统,即全球卫星导航系统(GNSS)和惯性导航系统(INS)的组合。全球卫星导航系统用于实现绝对定位,而惯性导航系统用于实现相对定位,两者相结…
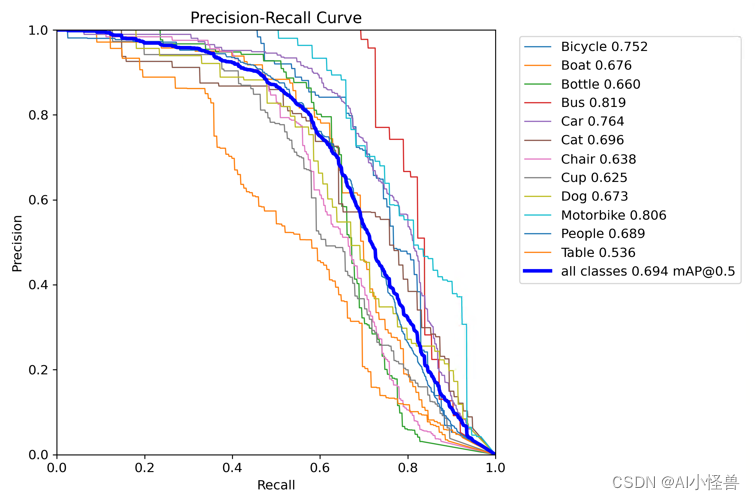
基于YOLOv8的暗光低光环境下(ExDark数据集)检测,加入多种优化方式---DCNv4结合SPPF ,助力自动驾驶(一)
💡💡💡本文主要内容:详细介绍了暗光低光数据集检测整个过程,从数据集到训练模型到结果可视化分析,以及如何优化提升检测性能。
💡💡💡加入 DCNv4结合SPPF mAP0.5由原始的0.682提升至…

Ubuntu20.04更新Cmake版本详解
最近在跑一个融合惯导定位的slam框架ins_eskf_kitti,在框架的安装过程中,需要对从GitHub上克隆下来的glog进行编译。其命令如下:
glog:
git clone https://github.com/google/glog.git
cd glog
mkdir build
cd build
cmake ..
m…

华为问界M9:全方位自动驾驶技术解决方案
华为问界M9的自动驾驶技术采用了多种方法来提高驾驶的便利性和安全性。以下是一些关键技术:
智能感知系统:问界M9配备了先进的传感器,包括高清摄像头、毫米波雷达、超声波雷达等,这些传感器可以实时监测车辆周围的环境࿰…
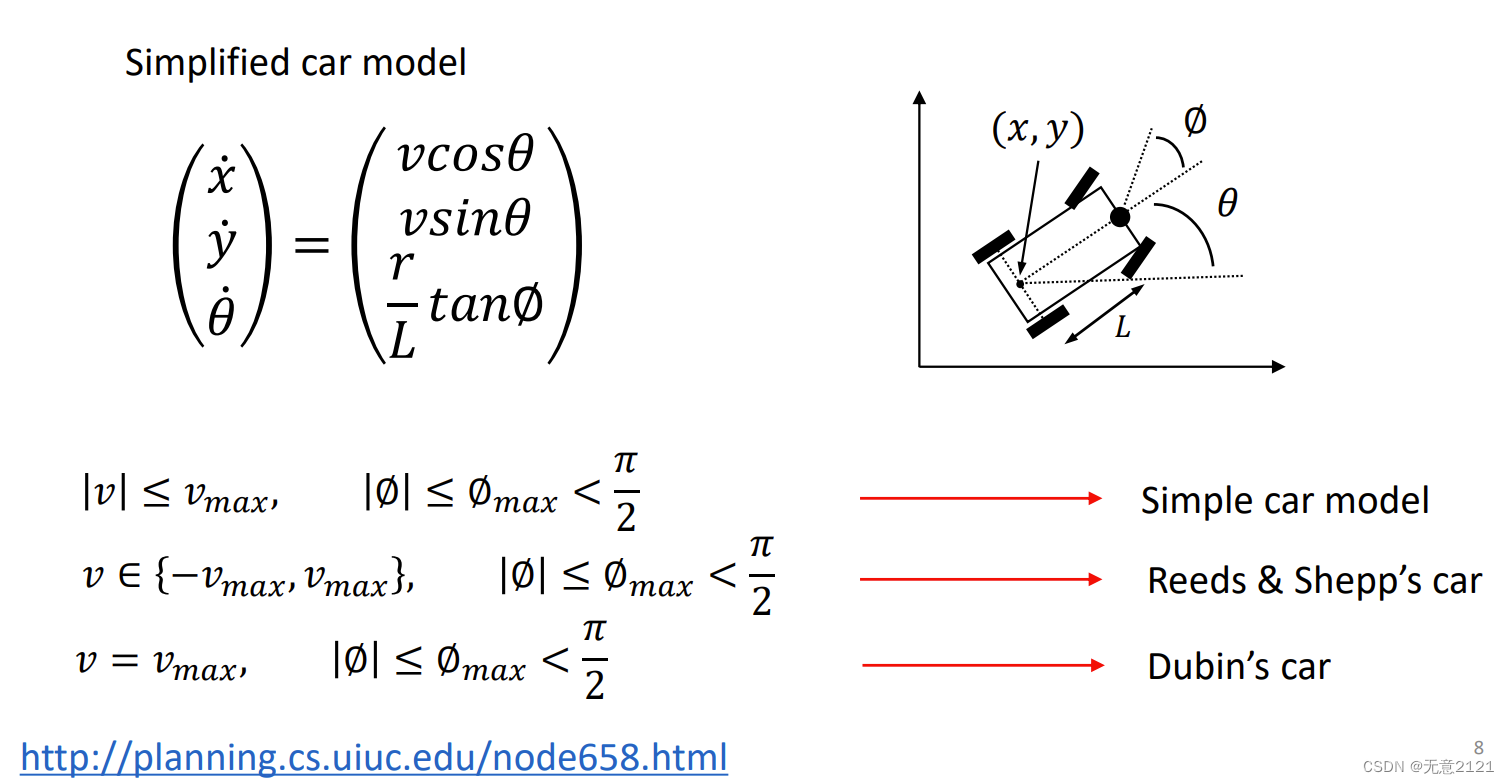
自动驾驶轨迹规划之kinodynamic planning
欢迎大家关注我的B站:
偷吃薯片的Zheng同学的个人空间-偷吃薯片的Zheng同学个人主页-哔哩哔哩视频 (bilibili.com)
本文PPT来自深蓝学院《移动机器人的运动规划》
目录
1.kinodynamic的背景
2. old-school pipline
3.example 1.kinodynamic的背景 kinodynami…
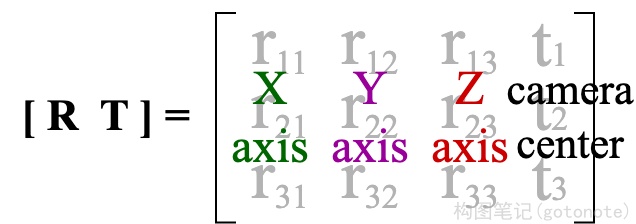
1.2.1 相机模型—内参、外参
相机模型-内参、外参
更多内容,请关注: github:https://github.com/gotonote/Autopilot-Notes.git)
针孔相机模型,包含四个坐标系:物理成像坐标系、像素坐标系、相机坐标系、世界坐标系。
相机参数包含&…

碳化硅模块使用烧结银双面散热DSC封装的优势与实现方法
碳化硅模块使用烧结银双面散热DSC封装的优势与实现方法 新能源车的大多数最先进 (SOTA) 电动汽车的牵引逆变器体积功率密度范围从基于 SSC-IGBT 的逆变器的 <10 kW/L 到基于 SSC-SiC 的逆变器的约 25 kW/L。100 kW/L 代表了这一关键指标的巨大飞跃。 当然,随着新…
高速自动驾驶智慧匝道(HIC)系统功能规范
智慧匝道功能规范
Highway Intelligent Change Functional Specification 文件状态: 【√】草稿 【】正式发布 【】正在修改 文件起草分工 撰写: 审核: 编制: 签名: 日期: 审核: 签名&am…

Ubuntu20.04安装Carla0.9.15
文章目录 环境要求下载Carla解压Carla运行Carla测试官方用例创建python环境安装依赖包案例:生成车辆案例:测试自动驾驶 参考链接 环境要求
系统配置要求:
至少3G显存的GPU,推荐3060及以上的显卡进行Carla拟真。预留足够的硬盘空…
基于强化学习的自动驾驶决策研究综述
[摘要] 强化学习的发展推动了自动驾驶决策技术的进步,智能决策技术已成为自动驾驶领域高度关注的要 点问题。本文以强化学习算法发展为主线,综述该算法在单车自动驾驶决策领域的深入应用。对强化学习传统算 法、经典算法和前沿算法从基本原理和理论建模等方面进行归纳总结与…

自动驾驶---行业发展及就业环境杂谈
进入21世纪以来,自动驾驶行业有着飞速的发展,自动驾驶技术(L2---L3)也逐渐落地量产到寻常百姓家。虽然最早期量产FSD的特斯拉有着深厚的技术积累,但是进入2010年以后,国内的公司也逐渐发展起来自己的自动驾…

现代化数据架构升级:毫末智行自动驾驶如何应对年增20PB的数据规模挑战?
毫末智行是一家致力于自动驾驶的人工智能技术公司,其前身是长城汽车智能驾驶前瞻分部,以零事故、零拥堵、自由出行和高效物流为目标,助力合作伙伴重塑和全面升级整个社会的出行及物流方式。 在自动驾驶领域中,是什么原因让毫末智行…
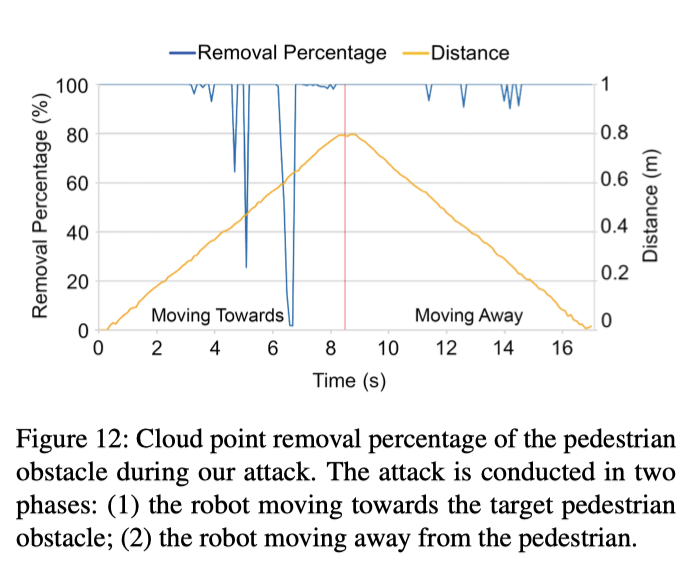
【论文阅读】Usenix Security 2023 你看不见我:对基于激光雷达的自动驾驶汽车驾驶框架的物理移除攻击
文章目录 一.论文信息二.论文内容1.摘要2.引言3.作者贡献4.主要图表5.结论 一.论文信息
论文题目: You Can’t See Me: Physical Removal Attacks on LiDAR-based Autonomous Vehicles Driving Frameworks(你看不见我:对基于激光雷达的自动驾驶汽车驾驶…

Carla自动驾驶仿真八:两种查找CARLA地图坐标点的方法
文章目录 前言一、通过Spectator获取坐标二、通过道路ID获取坐标总结 前言
CARLA没有直接的方法给使用者查找地图坐标点来生成车辆,这里推荐两种实用的方法在特定的地方生成车辆。 一、通过Spectator获取坐标
1、Spectator(观察者)…
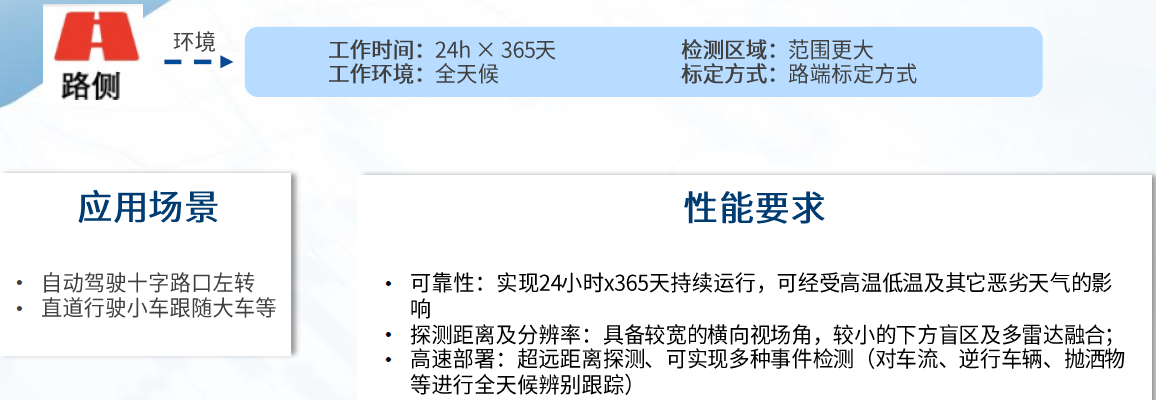
传感器为智能化基础,L3车规落地打开激光雷达新空间(上)
1 智能化重新定义汽车,开启“新赛道”
1.1 新技术重新定义汽车,开启智能汽车时代 1.2 从整车看来,智能化产品带来汽车定位差异 颠覆性体验感打通消费者消费升级感受空间,用户对智能化功能需求度变高。未来车只分为“能自动驾驶…

华为自动驾驶技术详解报告分享
ADS2.0首发搭载问界M5智驾版,城市NCA计划年底全国开通。2023年4月16日华为在智能汽车解决方案发布会上发布了最新的ADS2.0产品,硬件数量减少至27个(11个摄像头12个超声波雷达3个毫米波雷达1个激光雷达,ADS1.0有34个),车载计算平台改为MDC610&…
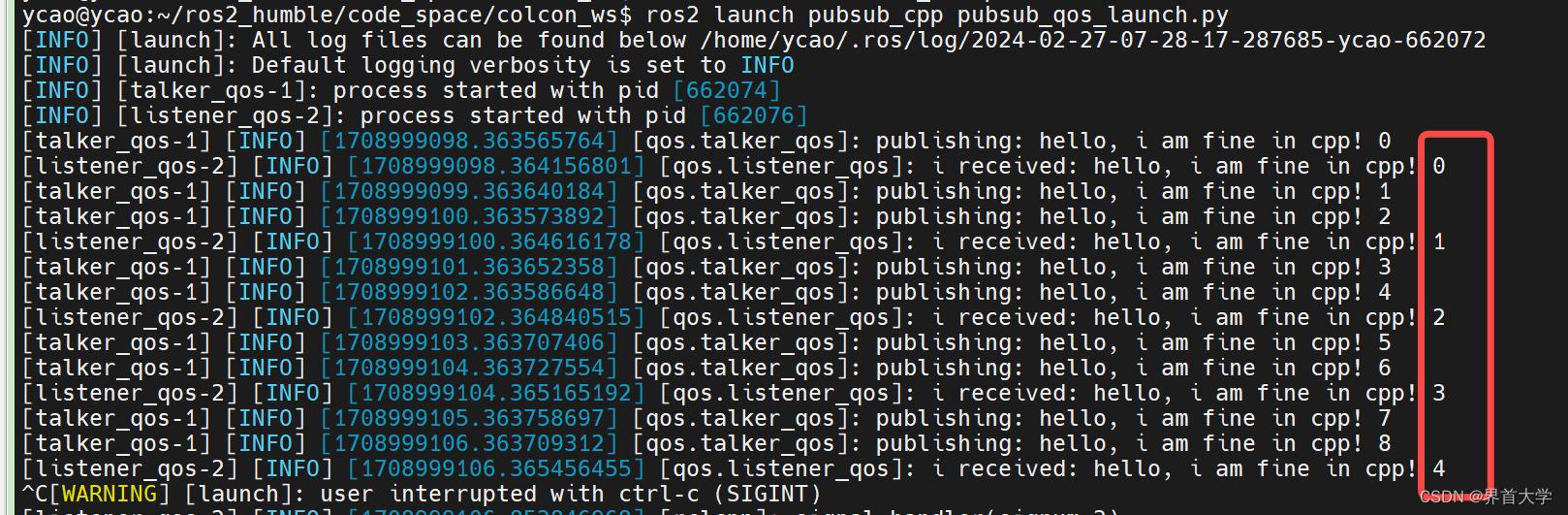
ROS2高效学习第四章 -- ros2 topic 编程之测试 DDS 的 QoS
ros2 topic 编程之测试 DDS 的 QoS 1 前言与资料2 正文2.1 DDS QoS 引入2.2 pubsub_py -- 测试新加入的节点能收到历史消息2.3 pubsub_cpp -- 测试订阅者能接收错过的消息 3 总结 1 前言与资料
在ROS2高效学习第一章 – ros2整体介绍及DDS引入中,我们系统介绍了 ro…
论文解读--Mutual Interference Mitigation in PMCW Automotive Radar
PMCW汽车雷达的相互干扰抑制
摘要 针对相位调制连续波(PMCW)毫米波(mmWave)汽车雷达系统中存在的相互干扰问题进行了研究。对先进驾驶辅助系统(ADAS)的需求日益增长,导致配备在同一频段工作的毫米波雷达系统的车辆激增,导致相互干扰,可能会降…
智能驾驶规划控制理论学习04-基于车辆运动学的规划方法
目录
一、线性二自由度汽车模型(自行车模型)
1、二自由度模型概述
2、不同参考点下的状态空间方程
3、前向仿真
二、运动基元生成方法
1、杜宾斯曲线(Dubins Curve)
2、Reeds Shepp Curve
三、多项式曲线(Poly…
自动驾驶传感器:惯性导航IMU原理
自动驾驶传感器:惯性导航IMU原理 附赠自动驾驶学习资料和量产经验:链接
组合导航里包含了GNSS卫星导航模块与IMU惯性导航模块,前一篇文章写了GNSS模块,本章写IMU惯导,也是本系列最后一篇文章。
1. 惯性测量单元&…

搭建机器人产业发展重要展示平台“2024南京国际机器人展览会”
2024南京国际智能机器人展览会
2024 Nanjing Intelligent Robot Expo
时间:2024年11月22-24日 地点:南京国际博览中心 南京,这座历史悠久的文化名城,如今正站在机器人产业发展的前沿。随着全球科技的飞速进步,机器人产业已经成为推动经济社…
LanguageMPC:将大模型作为自动驾驶的决策者(一)
欢迎大家关注我的B站:
偷吃薯片的Zheng同学的个人空间-偷吃薯片的Zheng同学个人主页-哔哩哔哩视频 (bilibili.com)
目录
1.引入LLM的背景
2.文章架构
3.国内外研究现状
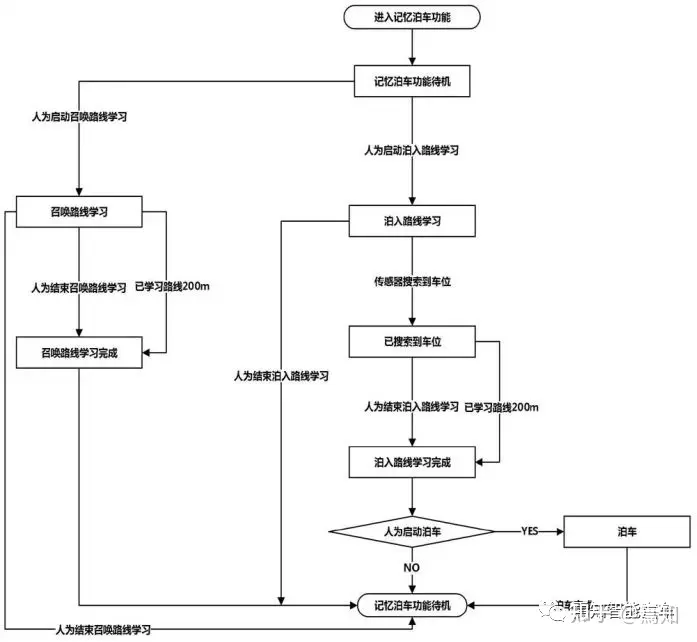
详细解析记忆泊车的顶层技术原理
详细解析记忆泊车的顶层技术原理 附赠自动驾驶学习资料和量产经验:链接
相对于记忆行车而言,记忆泊车 MPA(Memory Parking Assist)可以看成是停车场区域内的一个自动驾驶功能,可帮助用户按记忆的路线自动巡航并泊入车…
汽车电子行业知识:汽车电子领域包含哪些技术
汽车电子行业涉及到许多方面的知识,包括但不限于: 汽车电子控制单元(ECU):负责监控和控制车辆的各种系统,如发动机控制单元、制动系统控制单元、空调系统控制单元等。汽车传感器技术:包括温度传…
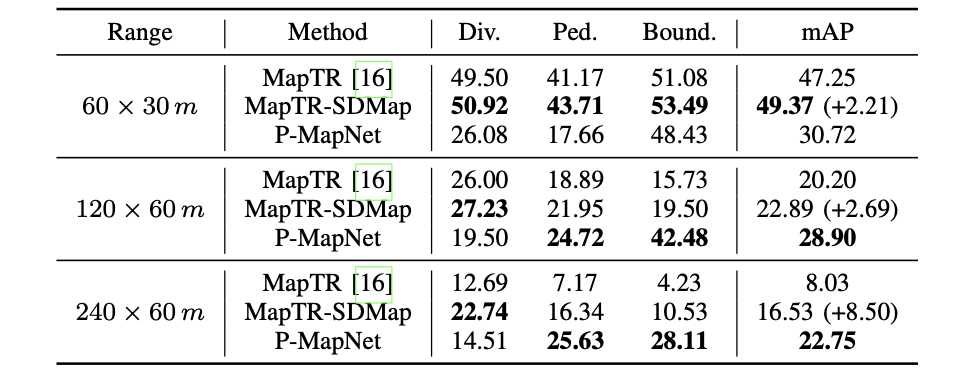
P-MapNet:Far-seeing Map Generator Enhanced by both SDMap and HDMap Priors
主页:homepage 参考代码:P-MapNet
动机与出发点 在感知系统中引入先验信息是可以提升静态元素感知网络的上限的,这篇文章对SD地图采用栅格化表示(也就是图像形式),之后用CNN网络去抽取栅格化SD地图的信息&…

PonyAi Planning-横纵向轨迹规划
PonyAi Planning-横纵向轨迹规划
轨迹规划的探索和挑战
轨迹规划的概念安全舒适两不误:探讨优化算法在规划控制中的应用 轨迹规划的概念
决策
横向规划
纵向规划
优化算法在规划(Planning)中的应用 附赠自动驾驶学习资料和量产经验…

基于无迹卡尔曼滤波的路面附着系数估计算法
基于无迹卡尔曼滤波的路面附着系数估计算法
附赠自动驾驶学习资料和量产经验:链接
路面附着系数作为车辆底盘动力学反馈控制中的重要变量,对它的精确估计直接关系到控制系统的平稳运行和车辆行驶安全。但是由于无法通过直接测量获得某些状态参数或者测…

ROS2从入门到精通0-4:ROS2核心架构与常用指令大全
目录 0 专栏介绍1 ROS2核心架构1.1 工作空间1.2 功能包 2 ROS2常用指令2.1 功能包相关2.2 节点运行相关2.3 话题相关2.4 参数相关2.4 录制包、播放包相关2.5 服务相关2.6 动作相关2.7 生命周期相关 0 专栏介绍
本专栏旨在通过对ROS2的系统学习,掌握ROS2底层基本分布…

单V及多V感知在自动驾驶在恶劣环境条件下的感知提升方案
单V及多V感知在自动驾驶在恶劣环境条件下的感知提升方案 附赠自动驾驶学习资料和量产经验:链接
自动驾驶中的视觉感知是车辆在不同交通条件下安全、可持续地行驶的关键部分。然而,在大雨和雾霾等恶劣天气下,视觉感知性能受到多种降级效应的极…

科创新格局·共赢双循环“2024上海智能科技与创新展览会”
2024上海智能科技与创新展览会,将于6月中旬在上海新国际博览中心隆重召开。作为一场盛大的科技盛会,此次展览会将汇聚科技前瞻趋势,融合产业贸易优势,布局初创投资赛道,提供全方位场景生态的跨界合作,构建“…

自动驾驶的世界模型:综述
自动驾驶的世界模型:综述 附赠自动驾驶学习资料和量产经验:链接
24年3月澳门大学和夏威夷大学的论文“World Models for Autonomous Driving: An Initial Survey”。
在快速发展的自动驾驶领域,准确预测未来事件并评估其影响的能力对安全性…
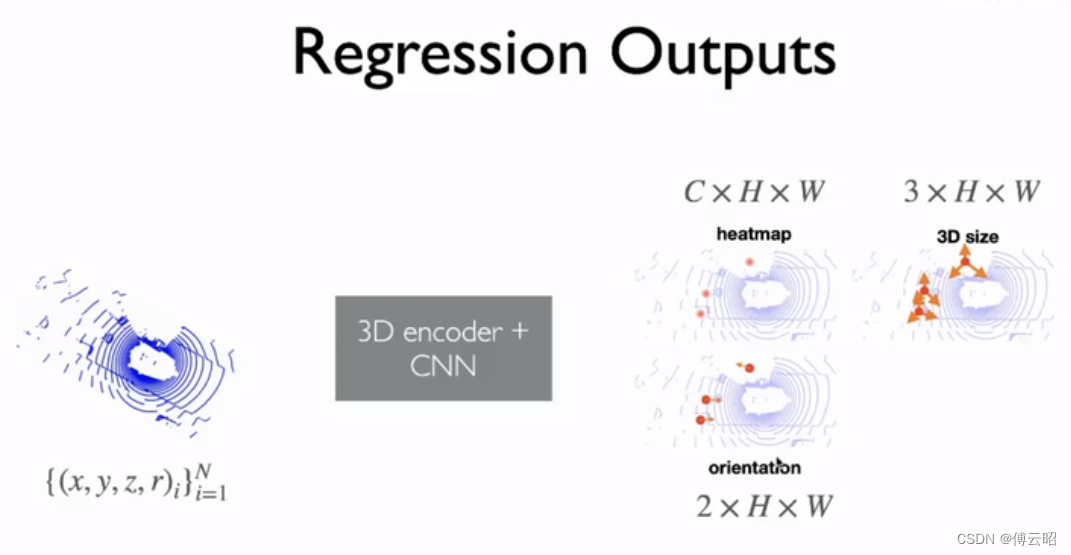
3D检测:从pointnet,voxelnet,pointpillar到centerpoint
记录centerpoint学习笔记。目前被引用1275次,非常高。
地址:Center-Based 3D Object Detection and Tracking (thecvf.com)
GitHub - tianweiy/CenterPoint
CenterPoint:三维点云目标检测算法梳理及最新进展(CVPR2021ÿ…
3D雷达和相机联合标定:一种灵活且精确的基于目标的外参标定方法
3D雷达和相机联合标定:一种灵活且精确的基于目标的外参标定方法
论文链接:https://arxiv.org/pdf/2307.15264.pdf
附赠自动驾驶学习资料和量产经验:链接
摘要
本文介绍了3D雷达和相机联合标定:一种灵活且精确的基于目标的外参…
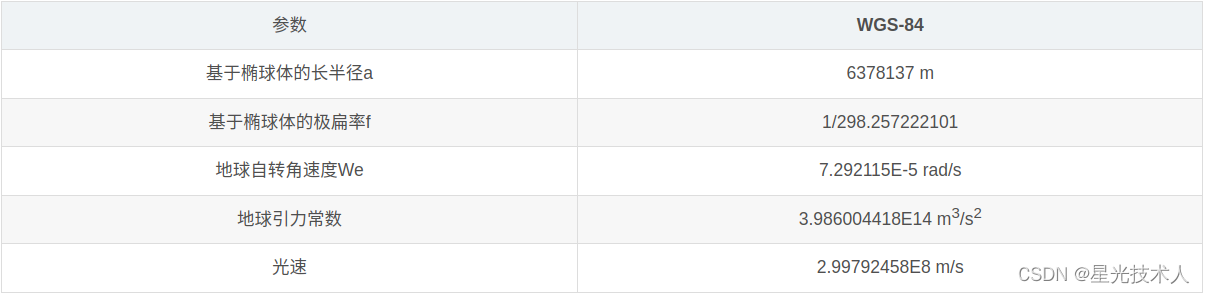
自动驾驶中各种坐标系辨析
坐标系辨析 0. 地球椭圆体1. 大地坐标系2. eci地心惯性坐标系3. 地心地固坐标系(ECEF坐标系,E系)4. 站心坐标系(ENU坐标系)5. UTM坐标系6. LTM坐标系7. IMU坐标系8. 代码部分8.1 LLA(大地坐标系坐标、经纬度海拔)坐标转LTM系(ENU系)下的三维笛卡尔坐标8.2 LLA坐标转…

语义分割——自动驾驶鱼眼数据集
一、重要性及意义
环境感知:语义分割技术能够精确识别道路、车辆、行人、障碍物、交通标志和信号等各种交通场景元素。这为自动驾驶系统提供了丰富的环境信息,有助于车辆准确理解周围环境的结构和动态变化。决策规划:基于语义分割的结果&…

目标点注意力Transformer:一种用于端到端自动驾驶的新型轨迹预测网络
目标点注意力Transformer:一种用于端到端自动驾驶的新型轨迹预测网络
附赠自动驾驶学习资料和量产经验:链接
摘要
本文介绍了目标点注意力Transformer:一种用于端到端自动驾驶的新型轨迹预测网络。在自动驾驶领域中,已经有很多…

基于深度学习的端到端自动驾驶的最新进展:调研综述
基于深度学习的端到端自动驾驶的最新进展:调研综述 附赠自动驾驶学习资料和量产经验:链接 论文链接:https://arxiv.org/pdf/2307.04370.pdf 调研链接:https://github.com/Pranav-chib/
摘要
本文介绍了基于深度学习的端到端自…
自动驾驶领域中的感知,决策,控制
目录
一、自动驾驶领域感知决策控制概论
二、自动驾驶感知
三、自动驾驶决策
四、自动驾驶控制 一、自动驾驶领域感知决策控制概论 1.感知(Perception):感知是指系统通过各种传感器来感知周围环境的能力,包括识别和理解道路、…

DNFOMP:杂乱环境中自动驾驶汽车导航的动态神经场最优运动规划器
DNFOMP:杂乱环境中自动驾驶汽车导航的动态神经场最优运动规划器 附赠自动驾驶学习资料和量产经验:链接
摘要
本文介绍了DNFOMP:杂乱环境中自动驾驶汽车导航的动态神经场最优运动规划器。动态变化环境中的运动规划是自动驾驶中最复杂的挑战之…
2024年智能驾驶年度策略:自动驾驶开始由创造型行业转向工程型行业
感知模块技术路径已趋于收敛,自动驾驶从创造型行业迈向工程型行业。在特斯拉的引领下,国内主机厂2022年以来纷纷跟随特斯拉相继提出“重感知、轻地图”技术方案,全球自动驾驶行业感知模块技术路径从百花齐放开始走向收敛。我们认为主机厂智能…
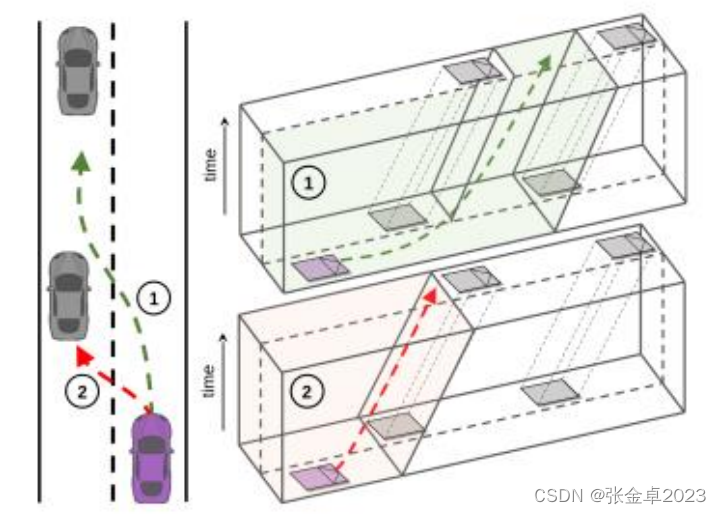
智能驾驶规划控制理论学习01-自动驾驶系统介绍、规划控制模块介绍
目录
一、自动驾驶系统概述
二、规划控制模块介绍
1、规划控制架构
2、规划控制目标
3、Cartesian和Frenet坐标系
4、Frenet坐标系概览
5、解耦式规划和联合式规划 一、自动驾驶系统概述 目前被国内外广为接受的自动驾驶级别划分标准是 SAEÿ…
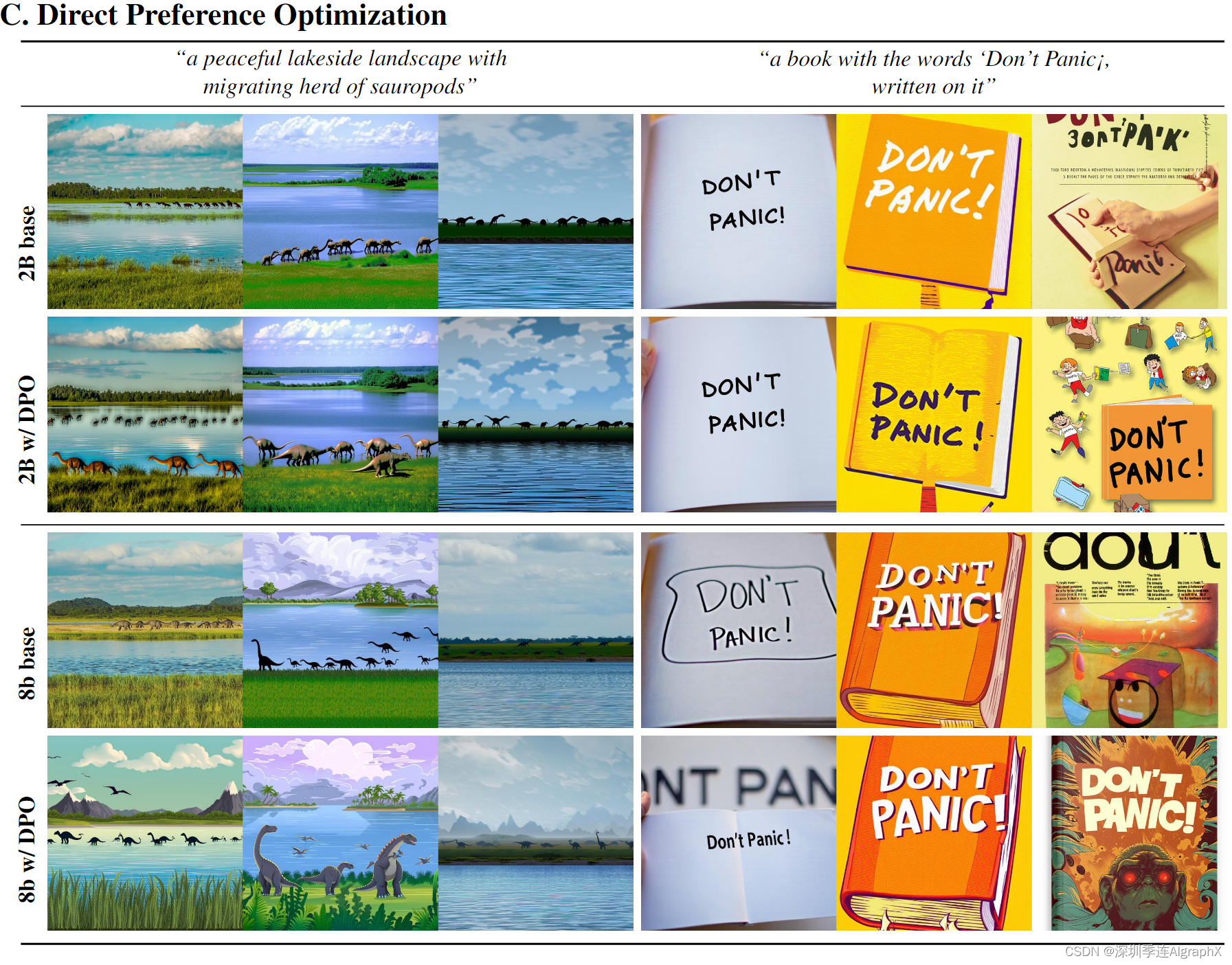
51-37 由浅入深理解 Stable Diffusion 3
2024年3月5日,Stability AI公开Stable Diffusion 3论文,Scaling Rectified Flow Transformers for High-Resolution Image Synthesis。公司像往常一样承诺后续将开源代码,开源之光!!! 在LDW潜在扩散模型论文…
![激光雷达和相机的联合标定工具箱[cam_lidar_calibration]介绍](https://img-blog.csdnimg.cn/c05a01bbfcc248d0b7a11829031b5869.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBA5pif5YWJ5oqA5pyv5Lq6,size_20,color_FFFFFF,t_70,g_se,x_16#pic_center)
激光雷达和相机的联合标定工具箱[cam_lidar_calibration]介绍
激光雷达和相机的联合标定工具箱[cam_lidar_calibration]介绍 写在前面安装过程调试过程标定成功可视化展示 写在前面
激光雷达和相机联合标定工具 论文地址:https://ieeexplore.ieee.org/stamp/stamp.jsp?tp&arnumber9564700 github地址: https://github.com…
智能网联汽车自动驾驶数据记录系统DSSAD数据配置
目录 第一章 数据配置一般要求 第二章 数据配置文件中的文件描述 第三章 数据配置文件中的数据描述 第四章 数据配置文件中的数据字典 表A.1 数据字典格式定义 第一章 数据配置一般要求 数据配置文件数据内容应为可读的十进制数据。 数据配置文件应以文件的形式存储在自动驾驶…
C++面试100问与自动驾驶100问
C的学习和面试其实是非常的不友好的,首先C的学习内容非常的多,其次C的面试不单单面试C的知识点,还有它的“七大姑八大姨”(计算机网络、数据结构、算法、计算机组成原理、操作系统、编译、xxx的底层实现 and so on)。 …
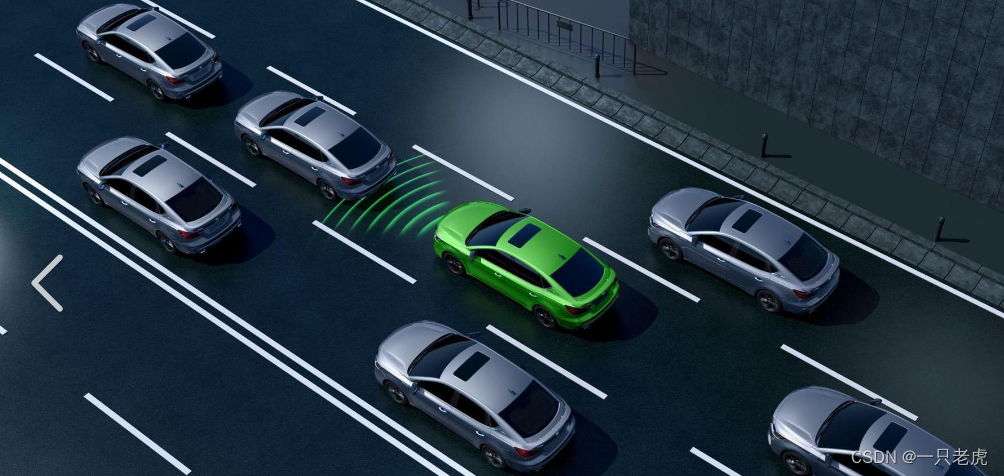
智能网联汽车自动驾驶数据记录系统DSSAD数据元素
目录
第一章 数据元素分级
第二章 数据元素分类
第三章 数据元素基本信息表
表1 车辆及自动驾驶数据记录系统基本信息
表2 车辆状态及动态信息
表3 自动驾驶系统运行信息
表4 行车环境信息
表5 驾驶员操作及状态信息 第一章 数据元素分级
自动驾驶数据记录系统记录的数…
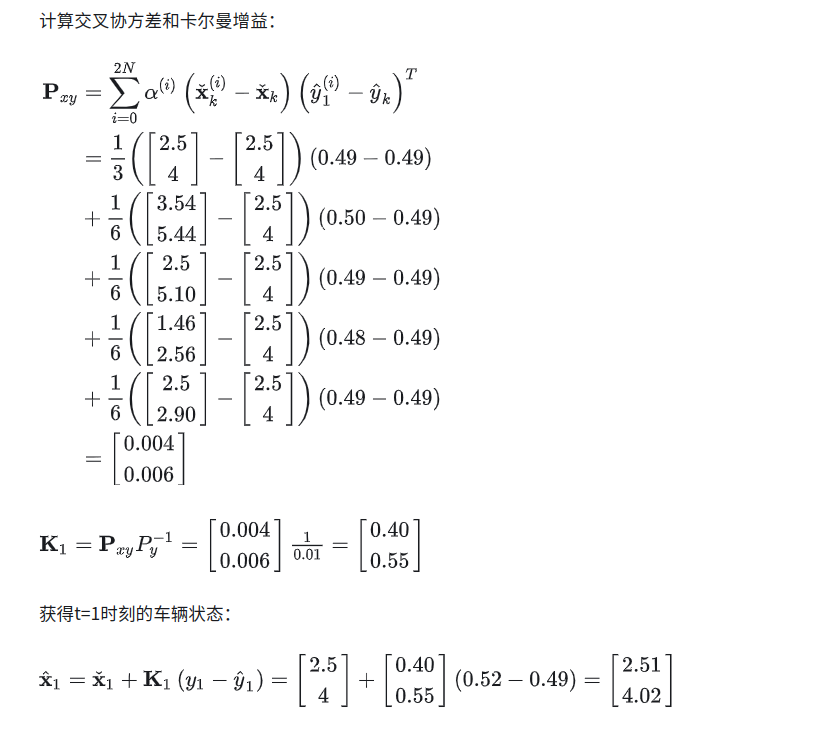
自动驾驶基础技术-无迹卡尔曼滤波UKF
自动驾驶基础技术-无迹卡尔曼滤波UKF
Unscented Kalman Filter是解决非线性卡尔曼滤波的另一种思路,它利用Unscented Transform来解决概率分布非线性变换的问题。UnScented Kalman Filter不需要像Extended Kalman Filter一样计算Jacobin矩阵,在计算量大…

自动驾驶中的多目标跟踪_第二篇
自动驾驶中的多目标跟踪:第二篇
上一节介绍了多目标跟踪的定义、应用场景和类型以及面临的挑战;在这一节,我们回顾贝叶斯滤波,简单介绍运动模型和量测模型,卡尔曼滤波等。 附赠自动驾驶学习资料和量产经验:链接
贝叶…

自动驾驶中的传感器融合算法:卡尔曼滤波器和扩展卡尔曼滤波器
自动驾驶中的传感器融合算法:卡尔曼滤波器和扩展卡尔曼滤波器 附赠自动驾驶学习资料和量产经验:链接
介绍:
追踪静止和移动的目标是自动驾驶技术领域最为需要的核心技术之一。来源于多种传感器的信号,包括摄像头,雷达…

自动驾驶中的多目标跟踪_第一篇
自动驾驶中的多目标跟踪:第一篇
多目标跟踪(multi-object/multi-target tracking)的任务包括估计场景中目标的数目、位置(状态)或其他属性,最关键的是需要在一段时间内持续地进行估计。 附赠自动驾驶学习资料和量产经验:链接
应…
自动驾驶中的传感器融合算法
目录
引言
一、传感器融合算法步骤
二、卡尔曼滤波 (Kalman Filter)
1. 卡尔曼滤波的原理
1.1. 预测步骤(Predict)
1.2. 更新步骤(Update)
2. 卡尔曼滤波在自动驾驶中的应用
2.1. 位置和姿态估计
2.2. 目标跟踪和感知
2…
Ubuntu20.04配置Kinect 2.0驱动安装和ROS环境下配置以及录制bag包和制作ORB-SLAM数据集
目录 1. 安装libfreenect21.1 下载官方文件1.2 安装build工具1.3 安装libusb1.4 安装urboJPEG1.5 安装OpenGL1.6 安装OpenCL1.7 安装OpenNI1.8 进入libfreenect2 文件夹,编译安装1.9 设定udev rules1.10 测试 2. 配置ROS环境2.1 下载iai_kinect2包并安装2.2 相机上电…

基于ros的相机内参标定过程
基于ros的相机内参标定过程 1. 安装还对应相机的驱动2. 启动相机节点发布主题3. 下载camera_calibartion4. 将红框的文件夹复制在自己的工作空间里边,编译5. 标定完成以后,生成内参参数文件camera.yaml。将文件放在对应的路径下,修改config文…
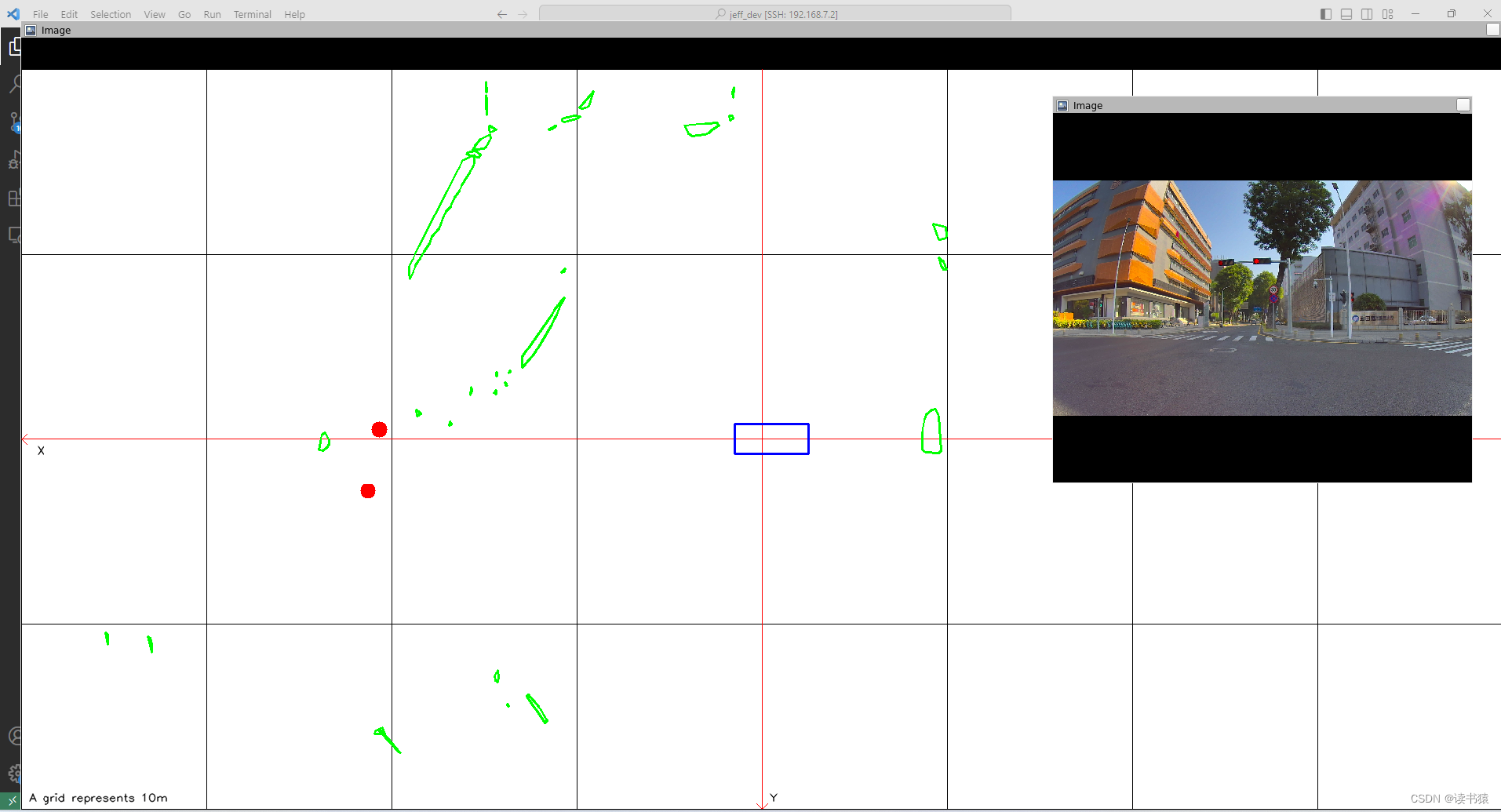
【ros】结果实时在线可视化
文章目录 一、前言二、订阅与发布三、回调四、可视化 4.1、初始化参数4.2、初始化图片 4.3、画结果 4.4、可视化结果 一、前言
感知与规划控制是无人驾驶算法重要算法,在交付测试阶段也最容易引起摩擦,这也是司空见惯的现象。有时候可能是接口对齐问题…
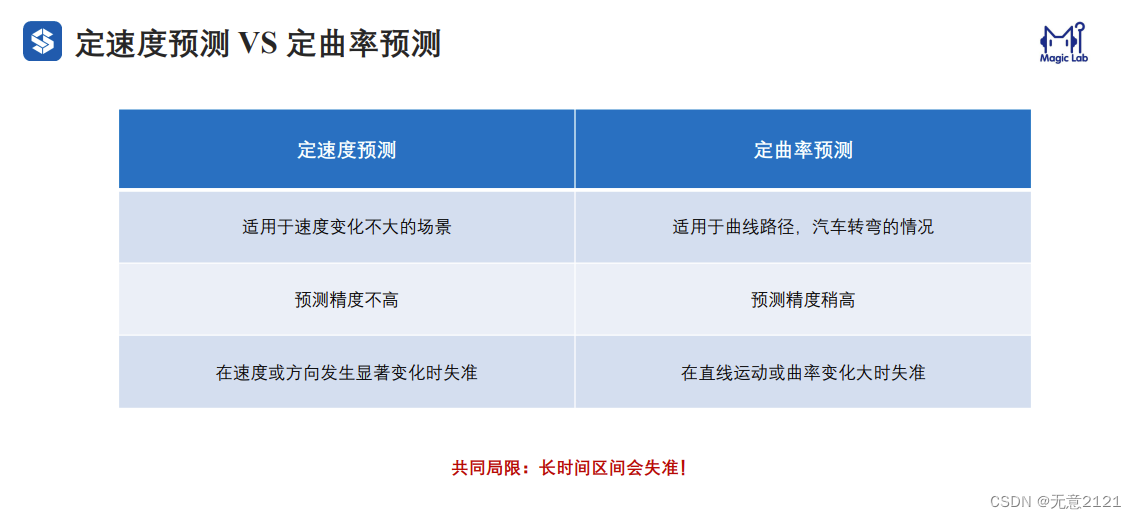
自动驾驶预测与决策规划(基于运动模型的预测)
欢迎大家关注我的B站:
偷吃薯片的Zheng同学的个人空间-偷吃薯片的Zheng同学个人主页-哔哩哔哩视频 (bilibili.com)
本文为深蓝学院《自动驾驶预测与决策规划》 的学习笔记
目录
1 Constant Velocity模型
2 Constant Turn 模型 1 Constant Velocity模型 Constan…
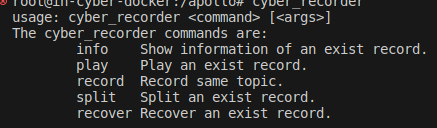
Cyber RT 开发工具
在Cyber RT中还提供了一些工具,这些工具可以拓展Cyber RT功能、提高开发调试效率,本章主要介绍这些工具的使用。
本章内容: 1.cyber record工具的应用; 2.常用命令工具的使用;
学习收获: 1.可以通过cyber record将发布的话题消息…

ROS从入门到精通4-2:Docker安装ROS、可视化仿真与终端复用
目录 0 专栏介绍1 Docker安装ROS2 Docker可视化仿真2.1 显示配置2.2 启动容器 3 终端复用工具3.1 session操作3.2 window操作3.3 pane操作3.4 其他操作 0 专栏介绍
本专栏旨在通过对ROS的系统学习,掌握ROS底层基本分布式原理,并具有机器人建模和应用ROS…

路径规划 | 详解维诺图Voronoi算法(附ROS C++/Python/Matlab仿真)
目录 0 专栏介绍1 维诺图规划原理2 ROS C实现(栅格图搜索)3 Python实现(路图搜索)4 Matlab实现(路图搜索) 0 专栏介绍
🔥附C/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等)&#…
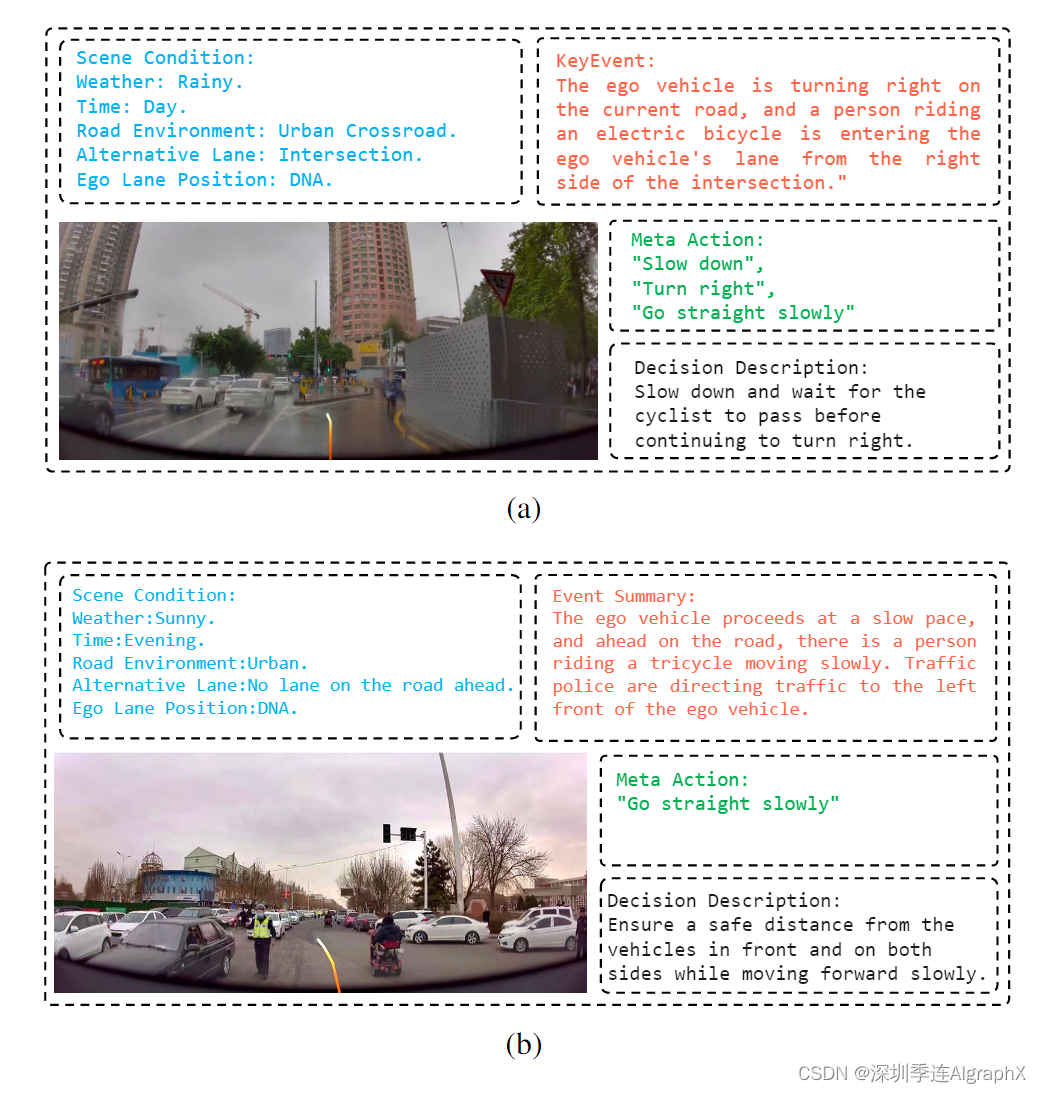
51-27 DirveVLM:自动驾驶与大型视觉语言模型的融合
本文由清华大学和理想汽车共同发布于2024年2月25日,论文名称DRIVEVLM: The Convergence of Autonomous Driving and Large Vision-Language Models.
DriveVLM是一种新颖的自动驾驶系统,旨在针对场景理解挑战,利用最近的视觉语言模型VLM&…

自动驾驶涉及相关的技术
当科幻走进现实,当影视照进生活,无数次憧憬的自动驾驶,正在慢慢的梦想成真。小时候天马星空的想象,现在正悄无声息的改变着我们的生活。随着汽车电动化进程的加快,自动驾驶技术映入眼帘,很多人可能感觉遥不…
学习人工智能:吴恩达《AI for everyone》2019 第3周:实现智能音箱和自动驾驶的几个步骤;无监督学习;增强学习
吴恩达 Andrew Ng, 斯坦福大学前教授,Google Brain项目发起人、领导者。
Coursera 的联合创始人和联合主席,在 Coursera 上有十万用户的《机器学习》课程;斯坦福大学计算机科学前教授。百度前副总裁、前首席科学家;谷…
计算机视觉入目要学习哪些东西及就业方向
计算机视觉是人工智能领域的一个重要分支,它涉及使计算机能够从图像或多维数据中理解和解释视觉信息的技术。要学习计算机视觉,你需要掌握以下几个方面的知识和技能: 基础数学知识: 线性代数:矩阵运算、特征值和特征向…

自动驾驶中的交通标志识别原理及应用
自动驾驶中的交通标志识别原理及应用 附赠自动驾驶学习资料和量产经验:链接
概述
道路交通标志和标线时引导道路使用者有秩序使用道路,以促进道路行车安全,而在驾驶辅助系统中对交通标志的识别则可以不间断的为整车控制提供相应的帮助。比如…
3D目标检测跟踪 | 基于kitti+waymo数据集的自动驾驶场景的3D目标检测+跟踪渲染可视化
项目应用场景 面向自动驾驶场景的 3D 目标检测目标跟踪,基于kittiwaymo数据集的自动驾驶场景的3D目标检测跟踪渲染可视化查看。
项目效果 项目细节 > 具体参见项目 README.md (1) Kitti detection 数据集结构
# For Kitti Detection Dataset
└── k…

自动驾驶中的多目标跟踪_第四篇
自动驾驶中的多目标跟踪:第四篇 附赠自动驾驶学习资料和量产经验:链接
在上篇,我们得到了杂波背景下单目标状态的后验概率表达式。在不进行近似的情况下,是无法应用到实际场景中的。因此,在这一节,我们来讨论如何进行…
Humanoid-Gym 开源人形机器人端到端强化学习训练框架!星动纪元联合清华大学、上海期智研究院发布!
系列文章目录 前言
Humanoid-Gym: Reinforcement Learning for Humanoid Robot with Zero-Shot Sim2Real Transfer
GitHub Repository: GitHub - roboterax/humanoid-gym: Humanoid-Gym: Reinforcement Learning for Humanoid Robot with Zero-Shot Sim2Real Transfer 一、介…
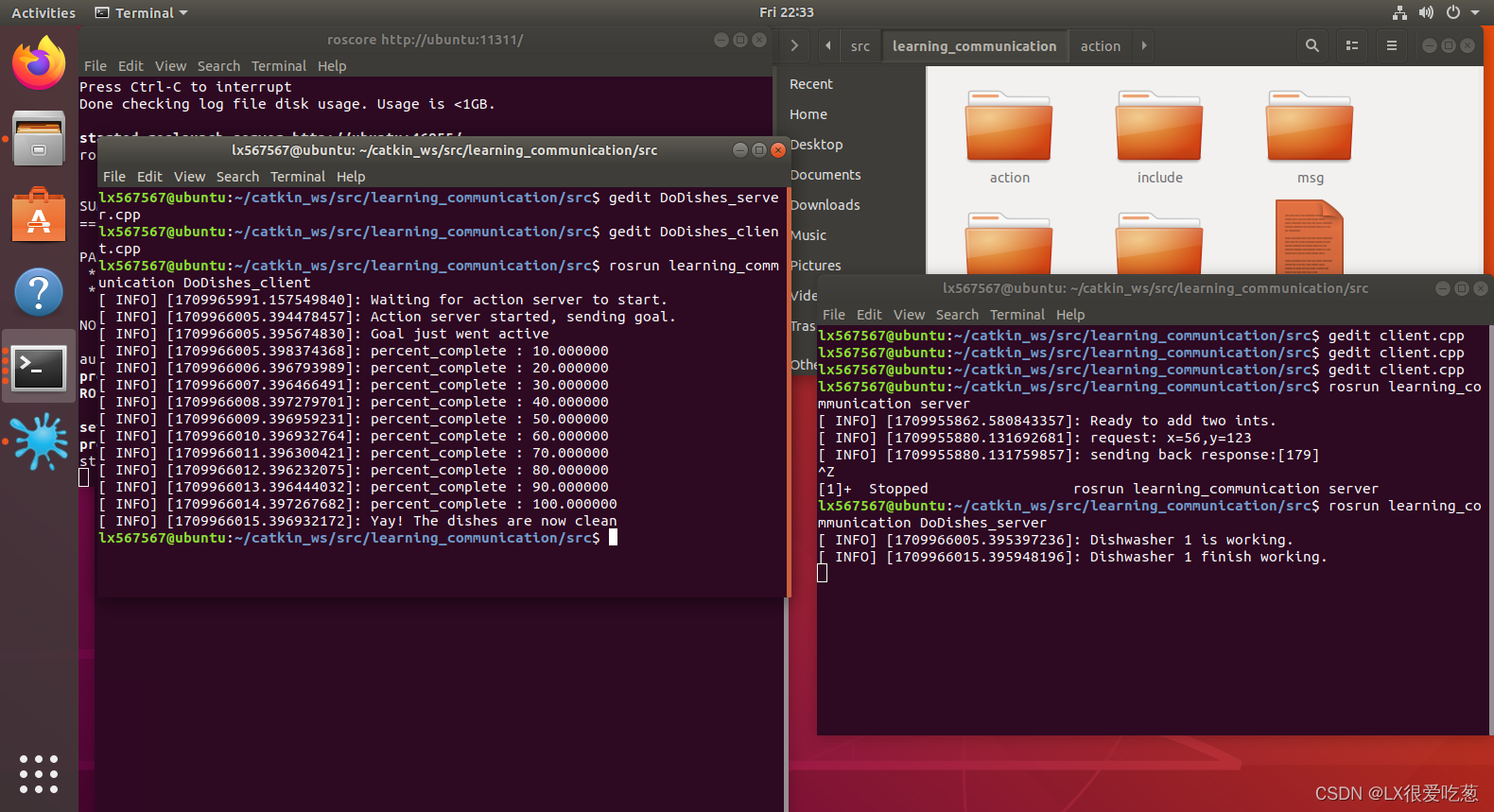
ROS基础学习—话题、服务、动作编程
ROS基础学习—话题、服务、动作编程 引言: 通过本实验,我们将进行ROS基础学习内容主要包括:话题、服务、动作编程。掌握ROS的这些基础概念,进一步深入ROS的学习。 希望你在本次学习过后,能够有一定的收获࿰…
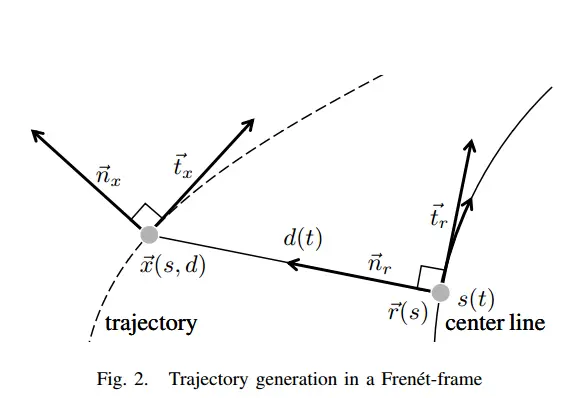
【自动驾驶坐标系基础】Frenet坐标系和Cartesian坐标系的相互转换
Frenet坐标系和Cartesian坐标系的相互转换
2023.12.12
1 变量含义 Frenet和Cartesian相互转换即 [ s , s ˙ , s , d , d ˙ , d ] ↔ [ X , θ x , κ x , v x , a x ] [s,\dot{s},\ddot{s},d,\dot{d},\ddot{d}] \leftrightarrow[\boldsymbol{X},\theta_x,\kappa_x,v_x,a_…

自动驾驶技术解析与关键步骤
目录 前言1 自动驾驶主要技术流程1.1 车辆周围环境感知1.2 车辆和行人检测分析1.3 运动轨迹规划 2 关键技术概述2.1 车辆探测与图片输入2.2 行人检测2.3 运动规划2.4 电子地图2.5 轨迹预测2.6 交通灯分析2.7 故障检测 结语 前言
自动驾驶汽车作为未来交通领域的重要发展方向&a…
自动驾驶---Motion Planning之Speed Boundary
1 背景 在上篇博客《自动驾驶---Motion Planning之Path Boundary》中,笔者主要介绍了path boundary的一些内容,通过将道路中感兴趣区域的动静态障碍物投影到车道坐标系中,用于确定L或者S的边界,并利用道路信息再确定Speed的边界,最后结合粗糙的速度曲线和路径曲线,即可使…

Constrained Iterative LQR 自动驾驶中使用的经典控制算法
Motion planning 运动规划在自动驾驶领域是一个比较有挑战的部分。它既要接受来自上层的行为理解和决策的输出,也要考虑一个包含道路结构和感知所检测到的所有障碍物状态的动态世界模型。最终生成一个满足安全性和可行性约束并且具有理想驾驶体验的轨迹。
通常,motion plann…
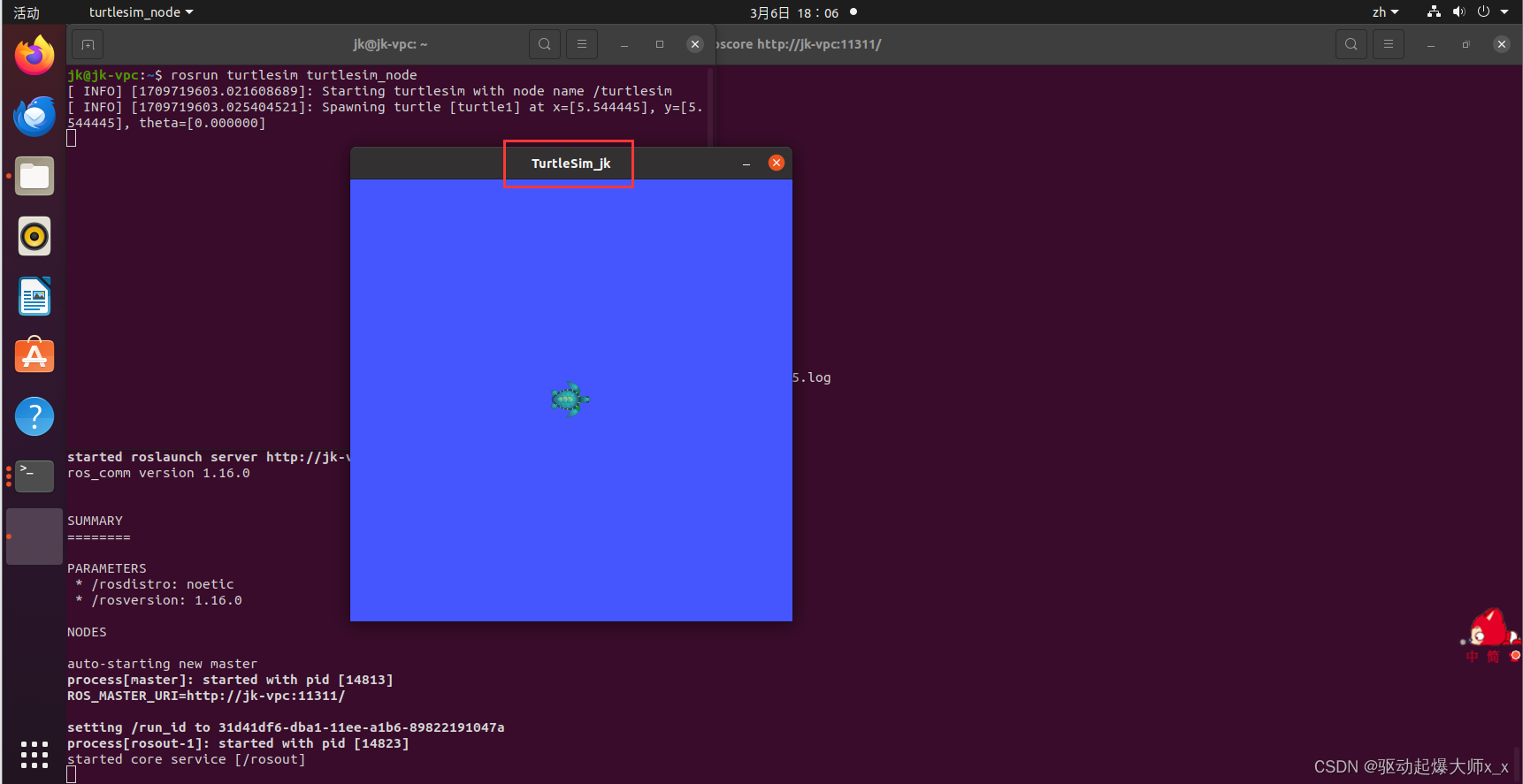
《Ubuntu20.04环境下的ROS进阶学习0》
一、逛ROS应用商店 在上一专栏http://t.csdnimg.cn/oGlcu,我们了解了ROS的基本功能。这一专栏将会在此基础上做出进一步拓展学习。那么首先我们要学会下载并阅读别人的代码。常用的两个应用商店一个是ROS的官方应用商店ROS index,另一个就是我们熟知的gi…
L3自动驾驶的“双保险”:冗余EPS关键技术解析
摘要:
本文主要介绍冗余EPS的发展路径和关键技术。 引言 在乘用车领域,电动助力转向系统(Electric Power Steering,EPS)相比传统的液压助力转向系统(Hydraulic Power Steering,HPS)具有结构简单、响应迅速、能耗低等优点,因此应用很广。随着智能驾驶的发展,作为底层…
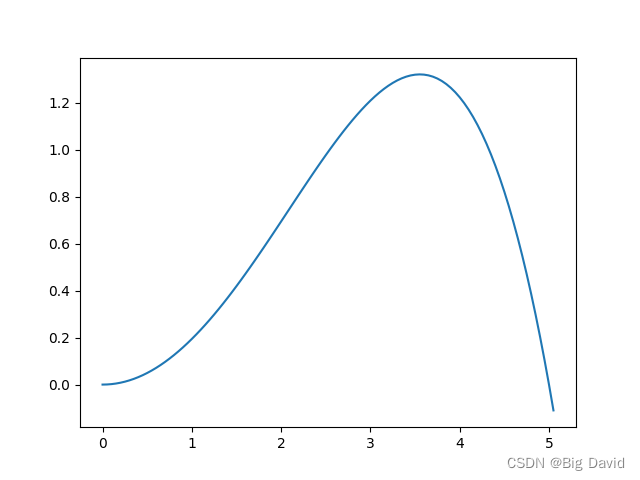
局部路径规划算法 - 多项式曲线法
参考:局部路径规划算法——曲线插值法
0 前言
1 多项式曲线法
1.1 算法简介
曲线插值的方法是按照车辆在某些特定条件(安全、快速、高效)下,进行路径的曲线拟合,常见的有多项式曲线、双圆弧段曲线、正弦函数曲线、…
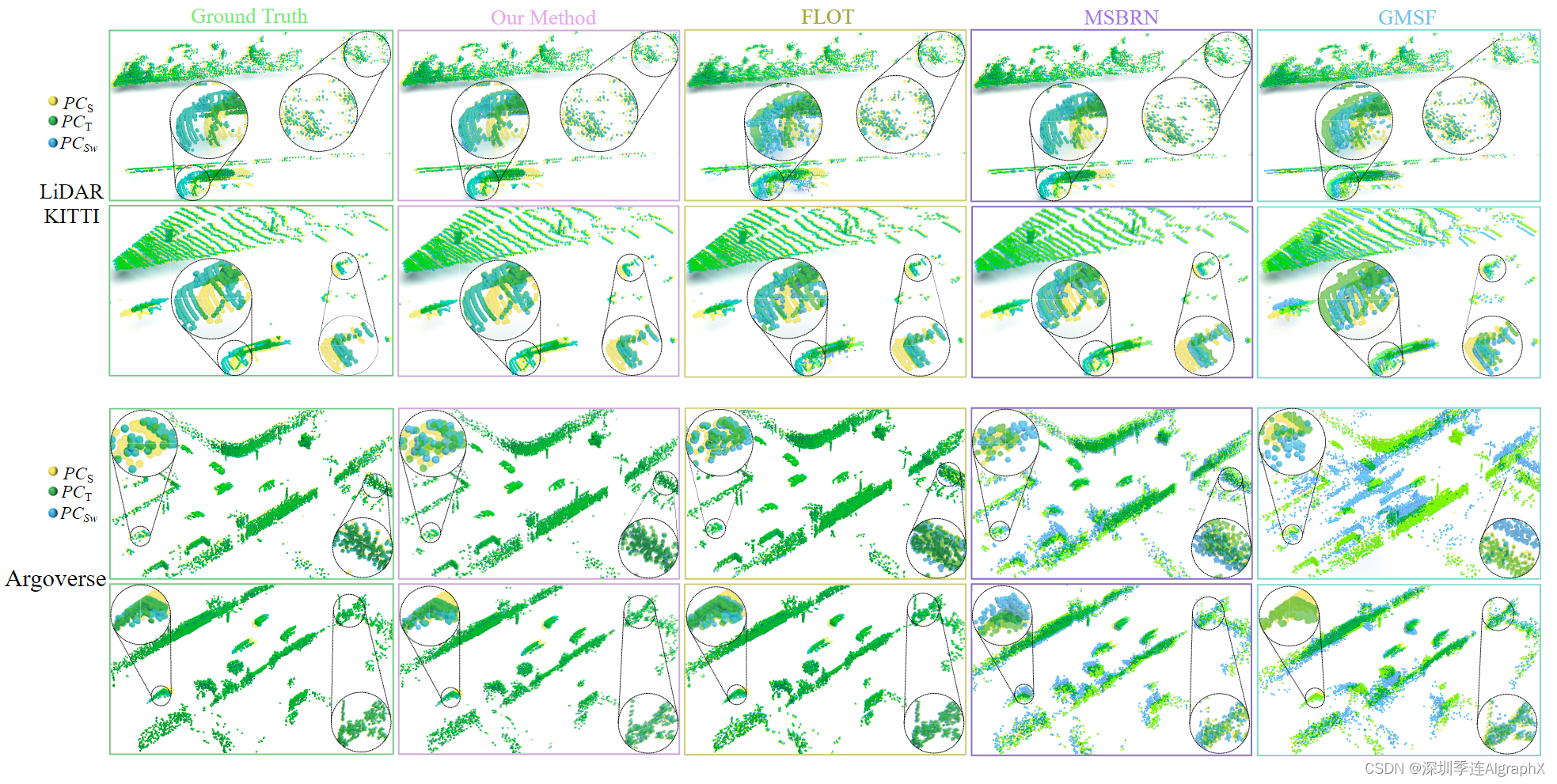
51-32 CVPR’24 | 3DSFLabelling,通过伪自动标注增强 3D 场景流估计
24 年 2 月,鉴智机器人、剑桥大学和上海交通大学联合发布CVPR24工作,3DSFLabelling: Boosting 3D Scene Flow Estimation by Pseudo Auto-labelling。
提出 3D 场景自动标注新框架,将 3D 点云打包成具有不同运动属性的 Boxes,通过…

4D毫米波雷达分类和工程实现
4D毫米波目标检测信息丰富,可获得目标3维位置信息、径向速度vr和rcs等,能够对目标准确分类。 4D毫米波和激光做好时空同步,可以用激光目标给4D毫米波做标注,提升标注效率。
1 激光用做4D毫米波分类真值 128线激光推理的结果作为4…
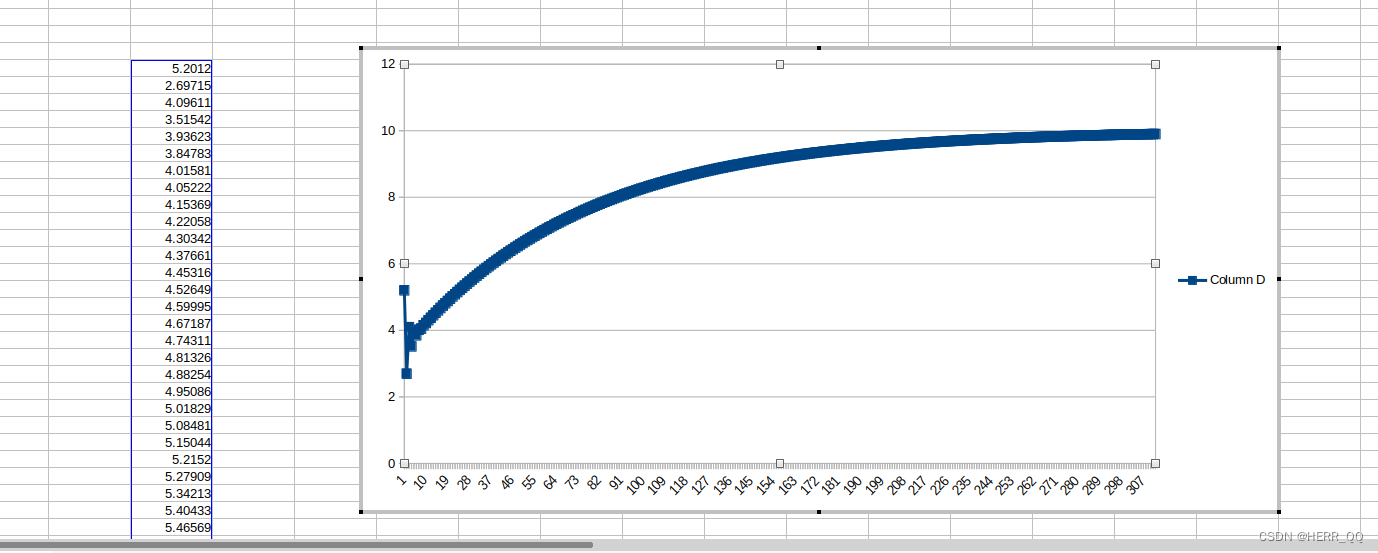
【algorithm】一个简单的PID工程 base 用于手生时候快速复习 用于设计模式 cpp语法八股 快速复习校验
写在前面
最近项目一直用matlab,防止手生整一个回忆工具使用的简单的pid demo,走一边流程,包括配工程debug看结果,复用之前记录的配置见我的bloghttps://blog.csdn.net/weixin_46479223/article/details/135082867?csdn_share_t…
AVP-SLAM:自动泊车系统中的语义SLAM_
AVP-SLAM:自动泊车系统中的语义SLAM
附赠最强自动驾驶学习资料:直达链接
●论文摘要 在自动代客泊车系统中车辆在狭窄且拥挤且没有GPS信号的停车场中进行导航,具备准确的定位能力是至关重要的。传统的基于视觉的方法由于在停车场中由于缺少…
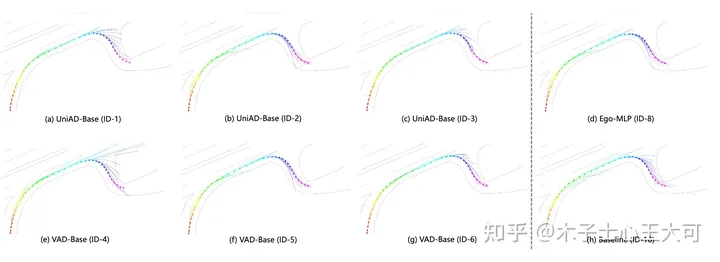
开环端到端自动驾驶: 到底行不行
开环端到端自动驾驶: 到底行不行
附赠全面专业的自动驾驶学习资料:直达链接
TLDR: 别在nuScenes上做开环端到端自动驾驶刷点了。
论文: https://arxiv.org/pdf/2312.03031.pdf
github: https://github.com/NVlabs/BEV-Planner
前言
Uni…
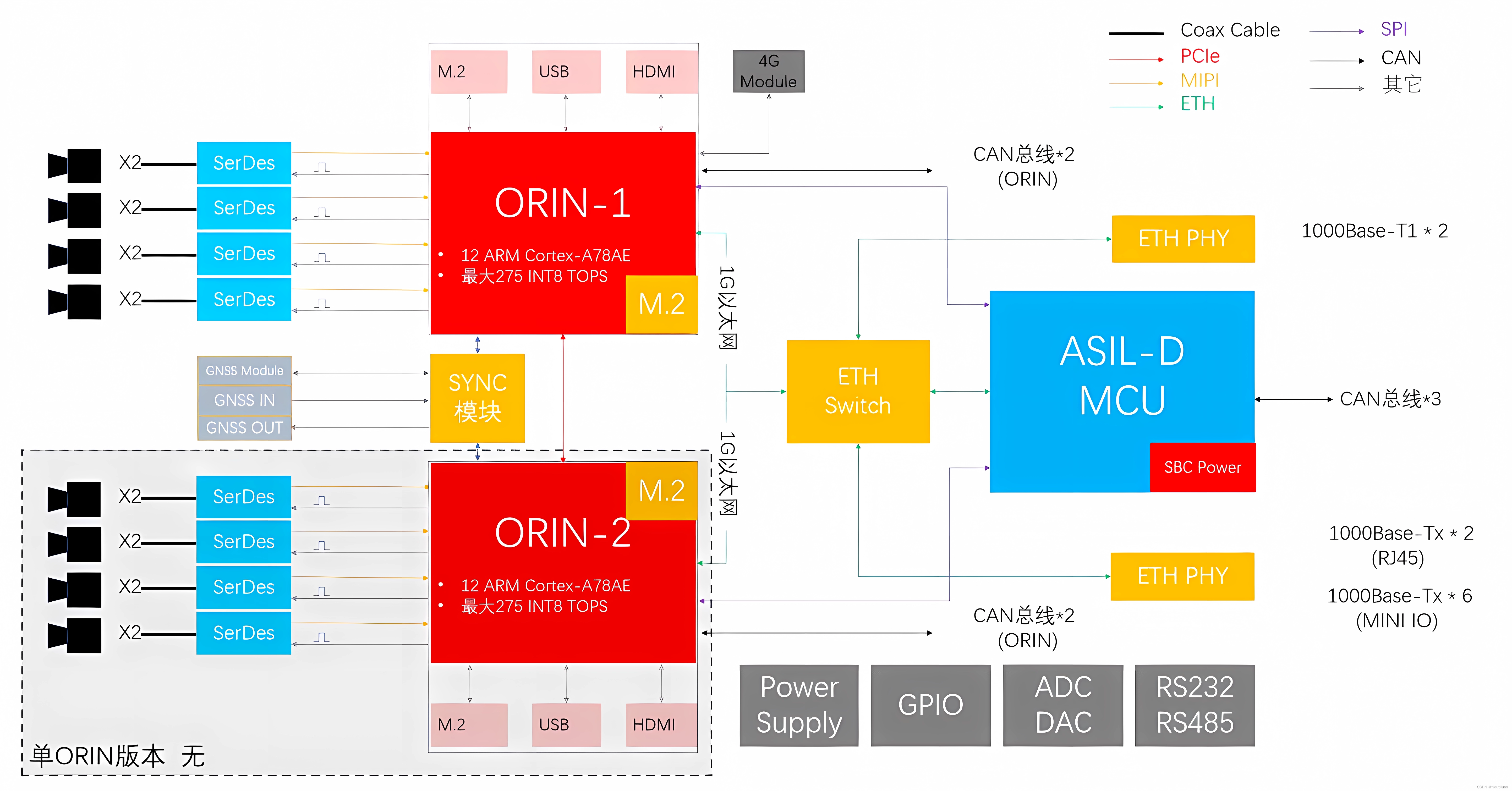
(一)、机器人时间同步方案分析
1、是否有必要进行时间同步 目前的自动驾驶系统包括 感知、定位、决策规划、控制 等模块,这些模块的正常运行需要依靠各种不同类型的传感器数据的准确 融合。尤其是激光雷达与相机这两种传感器在感、知定位模块中起着至关重要的作用。机械式旋转扫描激光雷达本身较低…
51-29 CVPR’24 | 开环端到端自动驾驶中自车状态是你所需要的一切吗?
本论文是南京大学、英伟达最新CVPR24工作。蛮幸运的,该论文提出了很多思考,证明了很多最优Paper在落地上车方面的无效性。咱们对待新方法能否成为自动驾驶的最佳实践要审慎。
论文名称:Is Ego Status All You Need for Open-Loop End-to-End Autonomous Driving? 论文链…
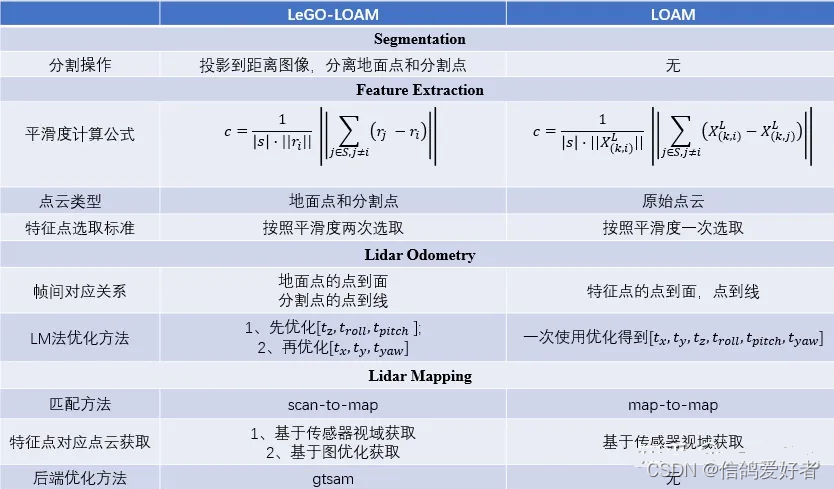
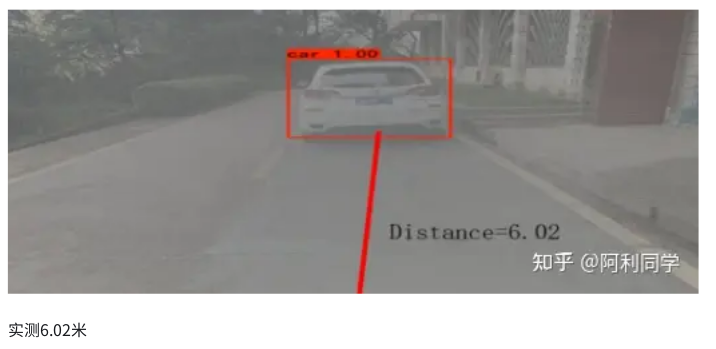
单目测距的基本介绍和实现原理
单目测距的基本介绍和实现原理 单目测距是一种常用的测量技术,它通过单个摄像头来测量物体与摄像头的距离。在现代科技的推动下,单目测距术正在不断发展和应用于各个领域。本文将分点阐述关于单目测距的重要性、原理和方法、应用领域以及潜在的挑战和发展…

基于消失点的相机自标定
基于消失点的相机自标定
附赠最强自动驾驶学习资料:直达链接
相机是通过透视投影变换来将3D场景转换为2D图像。在射影变换中,平行线相交于一点称之为消失点。本文详细介绍了两种利用消失点特性的标定方法。目的是为根据实际应用和初始条件选择合适的标…

京津冀自动驾驶产业盛会“2024北京国际自动驾驶技术展览会”
随着科技的飞速发展,自动驾驶技术成为了汽车产业变革的热点和前沿。智能化、网联化已经成为推动汽车产业创新发展的重要力量,而自动驾驶技术则是其中的关键一环。它不仅能够提高道路安全性、缓解交通拥堵,还能为乘客带来更加舒适、便捷的出行…

长三角科技盛会“2024南京国际人工智能,机器人,自动驾驶展览会”
2024南京国际人工智能,机器人,自动驾驶展览会
2024 Nanjing International Ai, Robotics, Autonomous Driving Expo
时间:2024年11月22-24日 地点:南京国际博览中心 南京,这座历史悠久的文化名城,如今正站在新一轮科技产业变革的前沿,以人工…
服务器版本ros镜像,包含了CAN通讯以及VNC界面操作
以下镜像包含了ros的moveit、novnc、CAN通讯,并且可以web操作界面:
19900617/ros-moveit-rviz-gazebo:noetic
docker-compose.yml配置文件如下:
version: 3services:ros:container_name: rosimage: 19900617/ros-moveit-rviz-gazebo:noeticentrypoint: ["b…
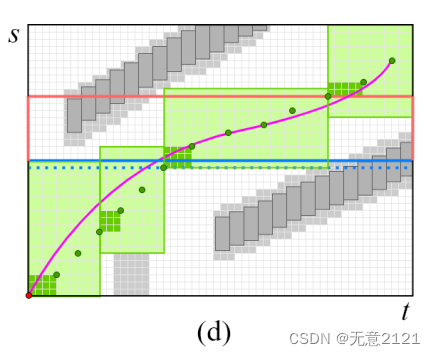
自动驾驶轨迹规划之时空语义走廊(一)
欢迎大家关注我的B站:
偷吃薯片的Zheng同学的个人空间-偷吃薯片的Zheng同学个人主页-哔哩哔哩视频 (bilibili.com)
目录
1.摘要
2.系统架构
3.MPDM
4.时空语义走廊
4.1 种子生成
4.2 具有语义边界的cube inflation
4.3 立方体松弛 本文解析了丁文超老师…
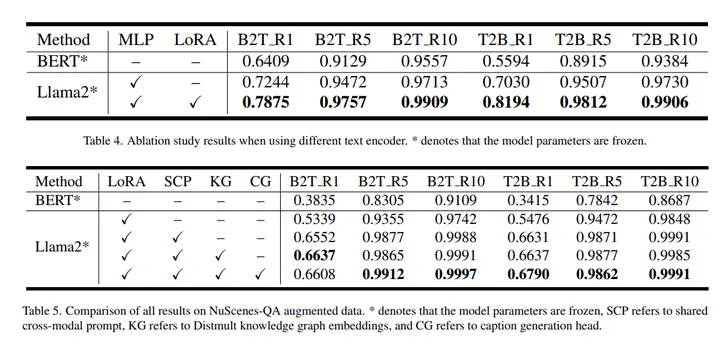
解决长尾问题,BEV-CLIP:自动驾驶中复杂场景的多模态BEV检索方法
解决长尾问题,BEV-CLIP:自动驾驶中复杂场景的多模态BEV检索方法 理想汽车的工作,原文,BEV-CLIP: Multi-modal BEV Retrieval Methodology for Complex Scene in Autonomous Driving
链接:https://arxiv.org/pdf/2401.…
ROS2 高效学习系列
ROS2 高效学习系列 1 说明2 正文 1 说明
2023 年,我们总结输出了 ROS高效入门系列 和 ROS高效进阶系列,系统学习了 ros1 基础知识和 ros 的机器人算法。由于 ros2 的普及,我们将系统学习 ros2 ,包括 ros2 基础知识和相关高级组件…


从政府工作报告中的IT热词统计探计算机行业发展(三)智能网联新能源汽车:2次
从政府工作报告探计算机行业发展 政府工作报告作为政府工作的全面总结和未来规划,不仅反映了国家整体的发展态势,也为各行各业提供了发展的指引和参考。随着信息技术的快速发展,计算机行业已经成为推动经济社会发展的重要引擎之一。因此&…
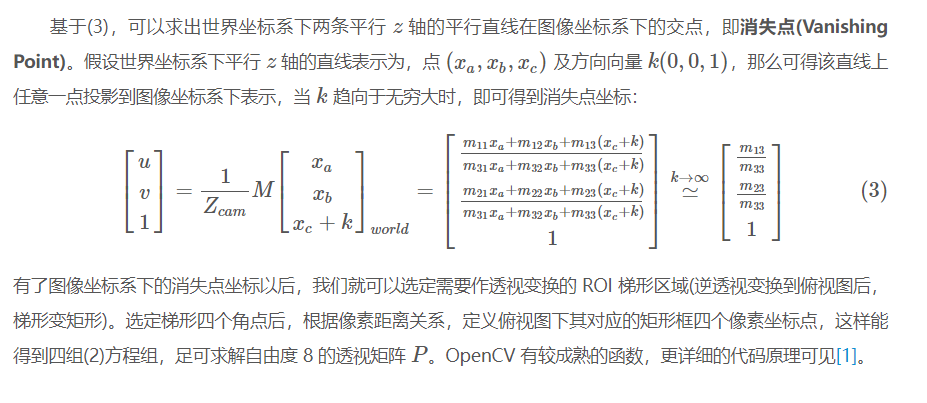
车道线检测中的IPM变换
车道线检测中的IPM变换
车道线检测(Lane Detection)是 ADAS 系统中重要的功能模块,而对于 L4 自动驾驶系统来说,在不完全依赖高精度地图的情况下,车道线检测结果也是车辆运动规划的重要输入信息。由于俯视图(BEV, Bird’s Eye View)下做车道…


ADAS多传感器后融合算法解析-上篇
ADAS多传感器后融合算法解析-上篇 附赠自动驾驶学习资料和量产经验:链接
ADAS系统是一种高自动化的软件应用,对系统的鲁棒性与可靠性要求很高,单一传感器往往存在一定限制,此时便需要多传感器融合。多传感器融合会带来如下收益&a…

Lanelets_ 高效的自动驾驶地图表达方式
Lanelets: 高效的自动驾驶地图表达方式 附赠自动驾驶学习资料和量产经验:链接
LaneLets是自动驾驶领域高精度地图的一种高效表达方式,它以彼此相互连接的LaneLets来描述自动驾驶可行驶区域,不仅可以表达车道几何,也可以完整表述车…

自动驾驶_交通标志识别:各目标检测算法评测
自动驾驶|交通标志识别:各目标检测算法评测
论文题目:Evaluation of Deep Neural Networks for traffic sign detection systems
开源代码:https://github.com/aarcosg/traffic-sign-detection 附赠自动驾驶学习资料和量产经验:…
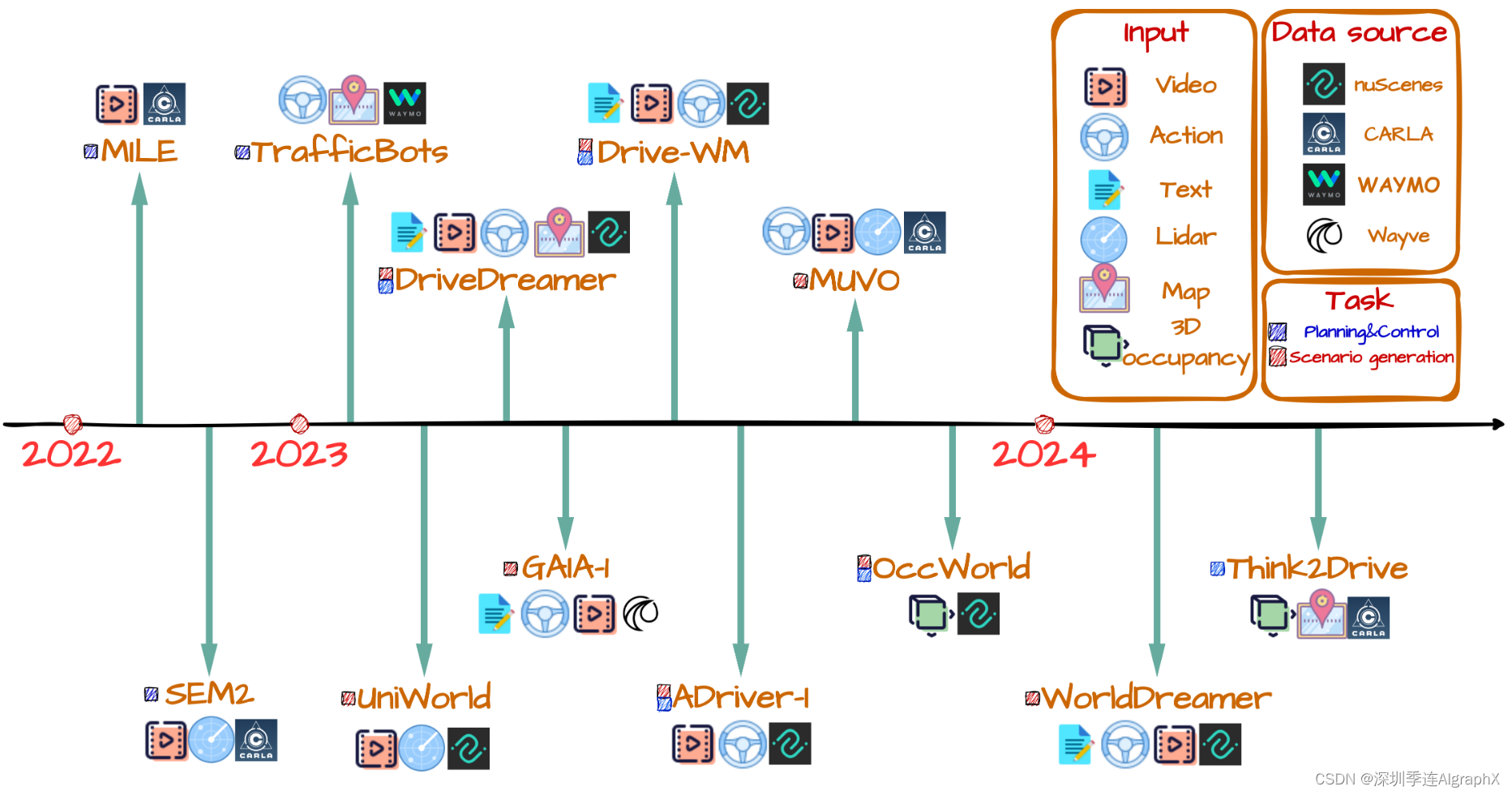
51-30 World Model | 自动驾驶的世界模型:综述
24年3月,澳门大学和夏威夷大学联合发布的工作,World Models for Autonomous Driving: An Initial Survey。花时间反复看了几遍,刚开始觉得世界模型没用,空洞无序,根本不可能部署到实车上,后面逐渐相信&…

曲线生成 | 图解B样条曲线生成原理(基本概念与节点生成算法)
目录 0 专栏介绍1 什么是B样条曲线?2 基函数的de Boor递推式3 B样条曲线基本概念图解4 节点生成公式 0 专栏介绍
🔥附C/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等)…

面向量产!基于视觉的速度距离估计
面向量产!基于视觉的速度距离估计
论文名称:Vision-based Vehicle Speed Estimation: A Survey
导读
在精确检测车速车距的方案中,视觉方案是非常具有挑战性的,但由于没有昂贵的距离传感器而大幅降低成本,所以潜力巨…
自动驾驶国际标准ISO文件
Coordinate system:Road vehicles — Vehicle dynamics and road-holding ability — Vocabulary

ROS2从入门到精通0-3:VSCode 搭建 ROS2 工程环境
目录 0 专栏介绍1 Ubuntu下安装VSCode1.1 基本安装1.2 将VSCode添加到侧边栏 2 VSCode集成相关插件3 VSCode运行ROS2环境步骤3.1 安装编译依赖项3.2 创建工作空间和源码空间3.3 启动VSCode与配置 4 测试工程环境4.1 C版本4.2 Python版本 0 专栏介绍
本专栏旨在通过对ROS2的系统…
自动驾驶技术的应用场景和限制
自动驾驶技术的应用场景和限制 自动驾驶技术的应用场景和限制是多方面的。以下是一些常见的应用场景和限制: 应用场景: 1. 高速公路自动驾驶:自动驾驶技术在高速公路上的应用相对较为成熟,可以实现车辆的自动巡航和自动变道…
UR5 机器人 URDF 代码阅读
系列文章目录 文章目录 系列文章目录前言一、UR5 URDF 代码二、base_link三、shoulder_pan_joint四、shoulder_pan_trans五、ROS base_link 坐标系到 UR 机器人 Base 坐标系的转换六、与全零TCP(工具坐标系)重合的工具链接 前言 一、UR5 URDF 代码
<…
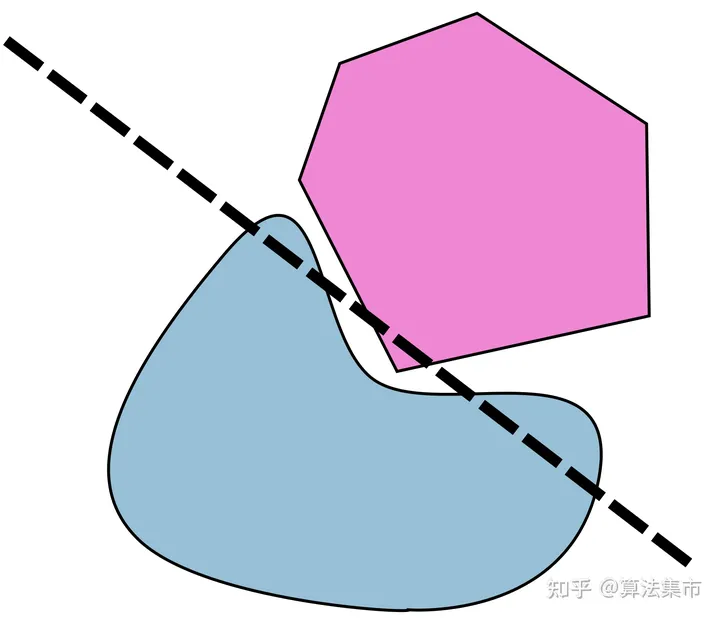
运动规划_碰撞检测算法之分离轴定理
运动规划:碰撞检测算法之分离轴定理 附赠自动驾驶全套学习资料和量产经验:链接
如上文所述,基于包围形的方法是一种粗略的碰撞检测方法,基于外接圆形的方法运算速度很快,但精度很差;基于轴对齐包围矩形(AA…
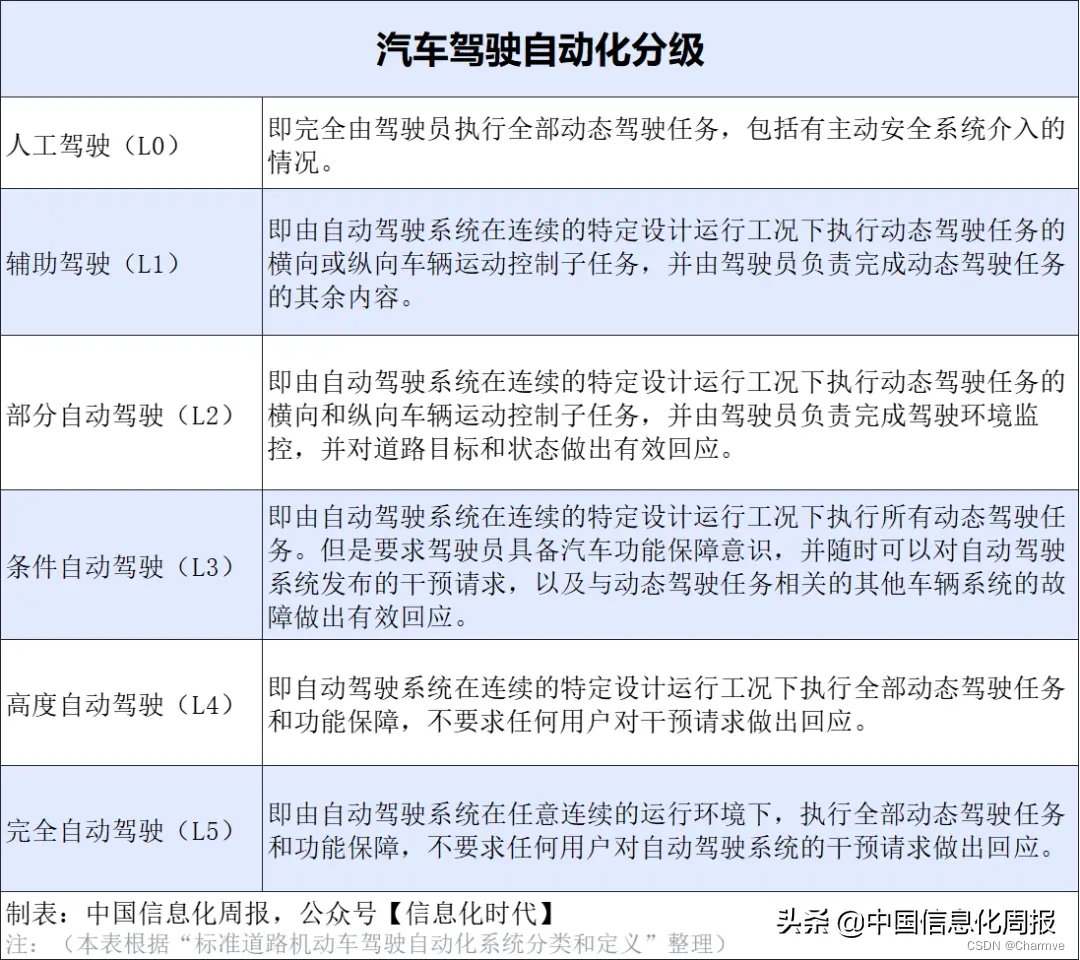
自动驾驶感知算法实战13——自动驾驶感知未来发展方向分享
自动驾驶感知算法实战专栏:https://blog.csdn.net/charmve/category_12097938.html目录 发展方向:分享:自动驾驶3.0未来需要解决的问题发展方向: 多模态感知 多任务处理 大模型(通用智能) 分享: 自动驾驶3.0 第一,自动驾驶3.0是数据驱动,更是“真实场景下的海量大数据…
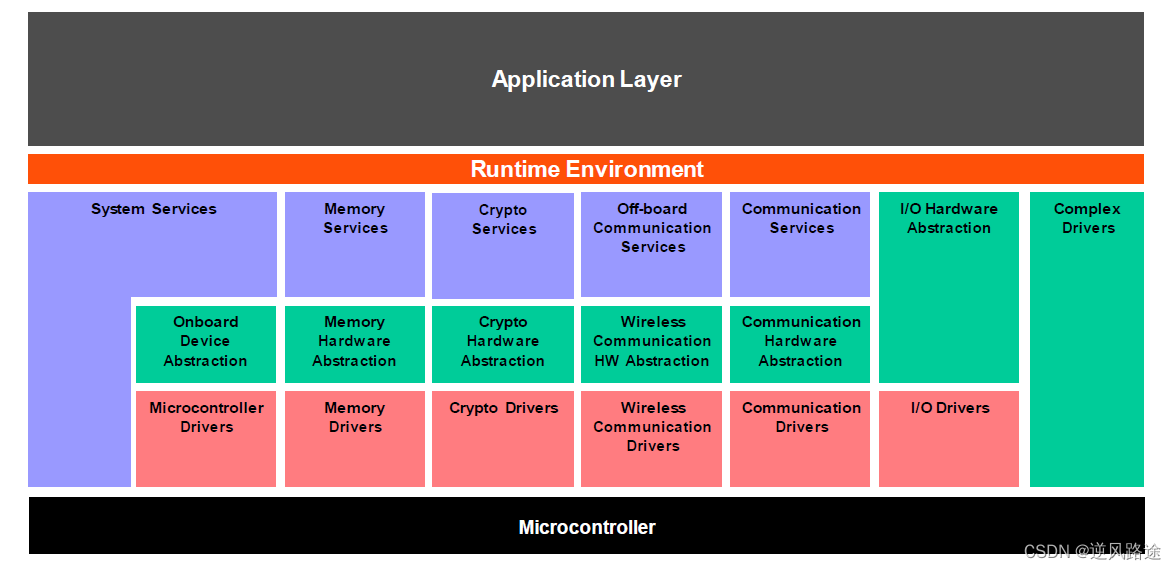
AUTOSAR架构介绍
简介
AUTOSAR(AUTomotive Open System ARchitecture)是一种面向汽车电子系统的软件架构标准。AUTOSAR为汽车电子系统提供一种开放式的软件架构标准,以促进汽车电子系统的可重用性、互操作性和可扩展性。它包括一系列的规范和标准,…
3D 点云综述(深度学习篇)
写在前面的话: 本文主要来自于文章《Deep Learning for 3D Point Clouds: A Survey》以及自己的感悟和看法
文章可以从这里下载:https://arxiv.org/pdf/1912.12033.pdf
持续更新中
一、3D点云来源:
3D点云(如下图所示),其主要来源于3D传感器,包括各种3D扫描仪,LiDA…
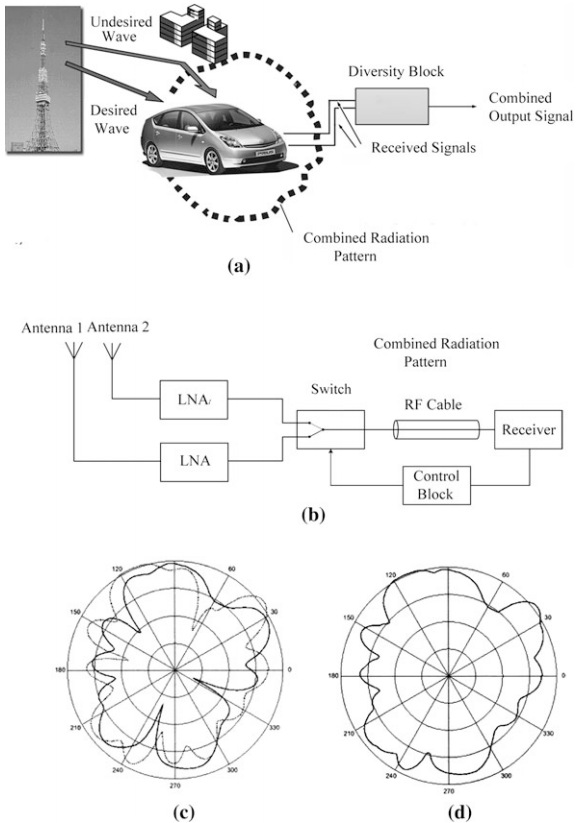
天线阵列车载应用——第1章 介绍 1.1节 汽车工业中的天线阵列:应用和频率范围
1.1 汽车工业中的天线阵列:应用和频率范围 无线通信系统的发展需要新的技术来支持更高质量的通信、新的服务和应用。近年来,汽车无线通信市场得到了极大的扩展。现代汽车使用不同的服务:AM/FM收音机、卫星广播(SDARS)、移动电话通信、数字音频广播(DAB)、远程无钥匙…

自动驾驶汽车关键技术_感知
自动驾驶汽车关键技术|感知 附赠自动驾驶学习资料和量产经验:链接
两套标准
分别由美国交通部下属的国家高速路安全管理局(NationalHighwayTraffic Safety Administration ,NHSTA) 和国际汽车工程师协会(Societyof Automotive Engineers&am…